|
5245| 4
|
[项目分享] 行空板K10 + 二哈识图 2 给脊柱请一位“AI 坐姿小卫士” |

|
本帖最后由 云天 于 2025-9-27 13:25 编辑 【项目背景】 项目缘起于对儿童青少年脊柱健康问题的深度关注。世界卫生组织数据显示,全球约七成中小学生存在不同程度的坐姿异常,我国中小学生脊柱侧弯发生率亦呈逐年上升趋势。传统矫正器具依赖被动束缚,舒适性差、依从性低,难以满足长期干预需求。 随着人工智能与嵌入式技术的普及,利用无感监测实现主动健康干预成为可能。本项目旨在开发一款基于 AI 视觉的坐姿提醒系统,通过实时检测头部姿态,对歪头、趴桌等不良坐姿进行即时声光反馈,从而培养使用者自主保持正确坐姿的习惯,达到预防脊柱畸形、降低近视发生率的目的。  【功能总览】 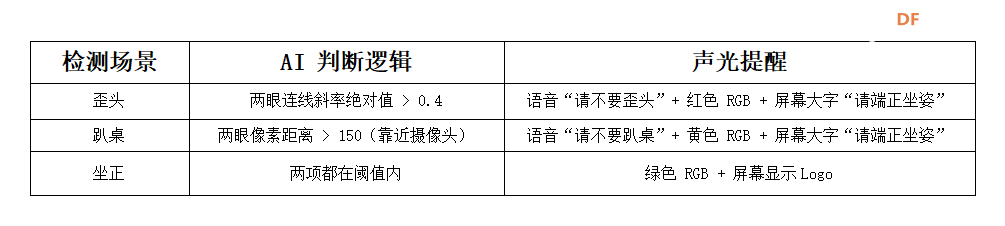 【硬件全家福】
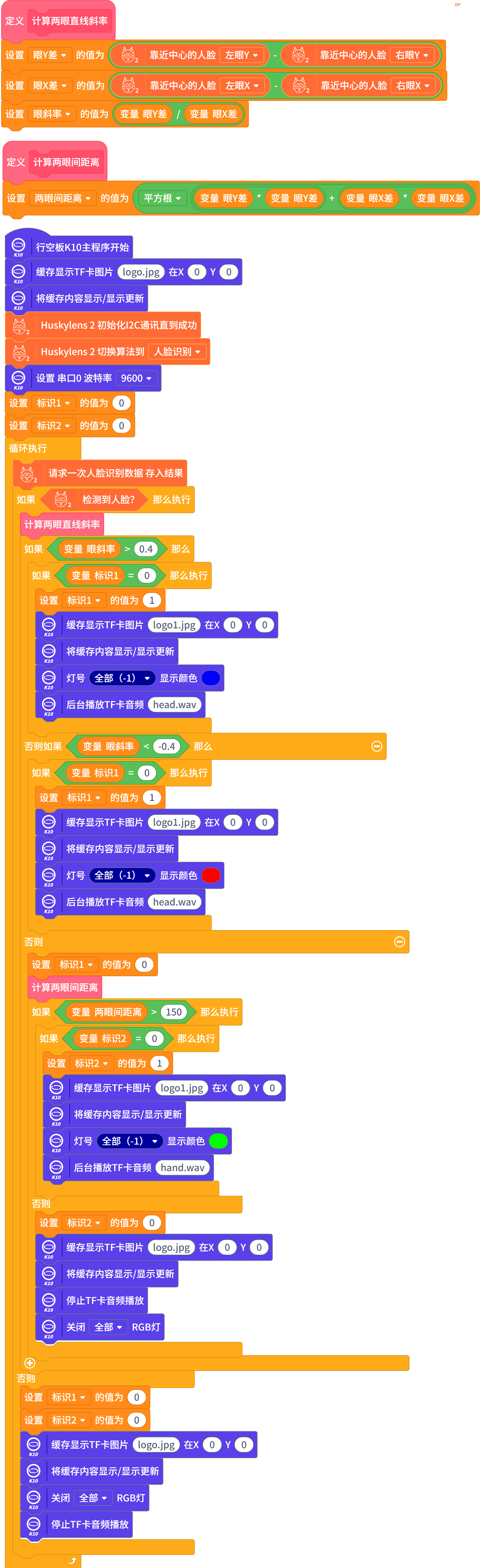 程序通过HuskyLens2识别双眼坐标后,实时计算其连线斜率与像素距离,若斜率绝对值大于0.4则判定歪头(可分别判断大于0.4或小于-0.4)、距离大于150则判定趴桌,触发对应语音与灯光提醒,否则亮绿灯并关闭提示。 【结构设计与装配】  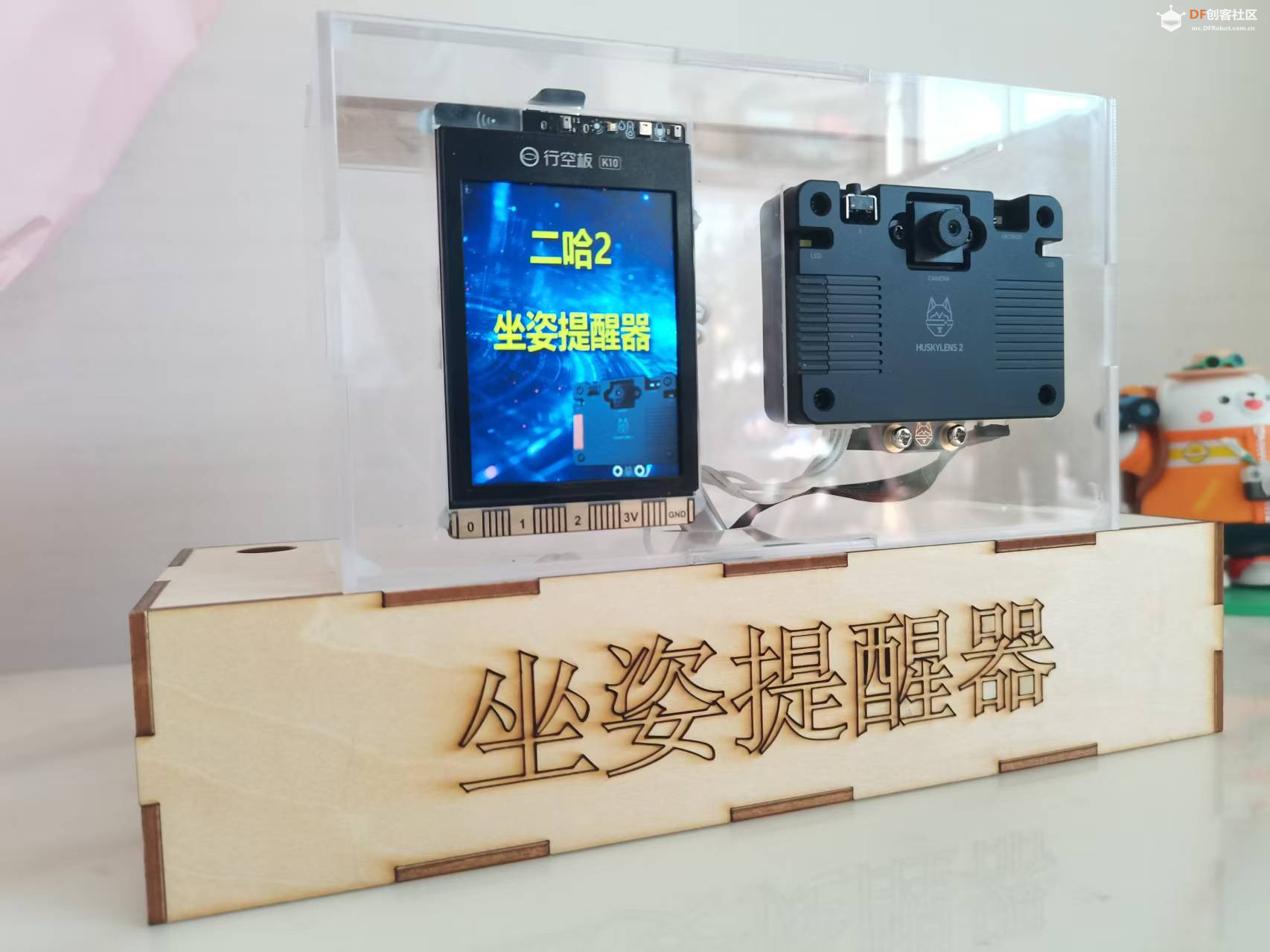  【演示视频】 AI 不只能下棋、自动驾驶,也能在 0.3 秒里守护一条小小的脊柱。希望这篇文章,能把“高冷”的 AI 视觉拉到你家书桌,让每一次提醒都成为孩子长高的“骨缝绿灯”。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






