|
1099| 5
|
[项目] 【花雕动手做】CanMV K230 AI视觉识别模块之使用 I2C 通讯 |
 什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。  |
|
什么是IIC (I2C, I²C) ? I²C(Inter-Integrated Circuit,也常写作 I2C 或 IIC)是一种由飞利浦(现恩智浦 / NXP)开发的短距离串行通信总线协议,主要用于连接集成电路(IC)之间的低速数据传输,其核心特点是通过两条线实现多设备间的通信,结构简单、成本低、扩展性强。 1、核心组成与工作原理 物理线路仅需两条双向信号线: SDA(Serial Data):串行数据线,用于传输实际数据。 SCL(Serial Clock):串行时钟线,由主设备(如 Arduino、MCU)提供时钟信号,同步数据传输节奏。 此外,所有设备需共地(GND),总线上通常接有上拉电阻(一般 4.7kΩ),确保空闲时线路处于高电平。 主从架构 主设备(Master):发起通信、控制时钟信号、决定数据传输方向(读 / 写),同一总线上可有多个主设备(需仲裁机制避免冲突)。 从设备(Slave):被动响应主设备的指令,每个从设备有唯一的 7 位或 10 位地址(7 位地址最常用,支持最多 128 个设备),通过地址被主设备选中。 通信过程基本流程为:主设备发送起始信号(SDA 从高到低,SCL 保持高电平)→ 发送从设备地址 + 读写位(1 位,读 = 1,写 = 0)→ 从设备返回应答信号(ACK)(SDA 拉低)→ 传输数据(每字节 8 位,后跟 ACK)→ 主设备发送停止信号(SDA 从低到高,SCL 保持高电平)。 2、主要特点 简单经济:仅需 2 根线,减少布线复杂度,适合小型设备(如传感器、OLED 屏、EEPROM)。 多设备支持:通过唯一地址区分从设备,总线上可挂接多个设备(受总线电容限制,通常建议不超过 10 个)。 低速传输:标准模式(100kbps)、快速模式(400kbps)、高速模式(3.4Mbps),适合非实时性数据(如温湿度、光照传感器数据)。 半双工通信:同一时间只能单向传输数据(主到从或从到主)。 3、典型应用场景 嵌入式系统:Arduino 与 OLED 屏(如 SSD1306)、温湿度传感器(如 SHT30)、加速度计(如 MPU6050)的通信。 消费电子:智能手机中的传感器模块(陀螺仪、磁力计)与主控芯片的连接。 工业控制:小型传感器(压力、液位)与 PLC 的低速数据交互。 存储设备:EEPROM(电可擦除存储器)与 MCU 的数据读写(如 AT24C02)。 4、与其他总线的对比 相比SPI:I²C 线数更少(2 线 vs SPI 的 4 线),但速度更低,适合轻量场景;SPI 支持全双工,速度更快(可达几十 Mbps)。 相比UART:I²C 支持多设备,而 UART 通常是点对点通信,且无需定义波特率(依赖时钟同步)。 总之,I²C 是一种 “以简单换效率” 的总线协议,在低速、多设备的短距离通信中应用广泛,尤其适合资源受限的嵌入式系统。  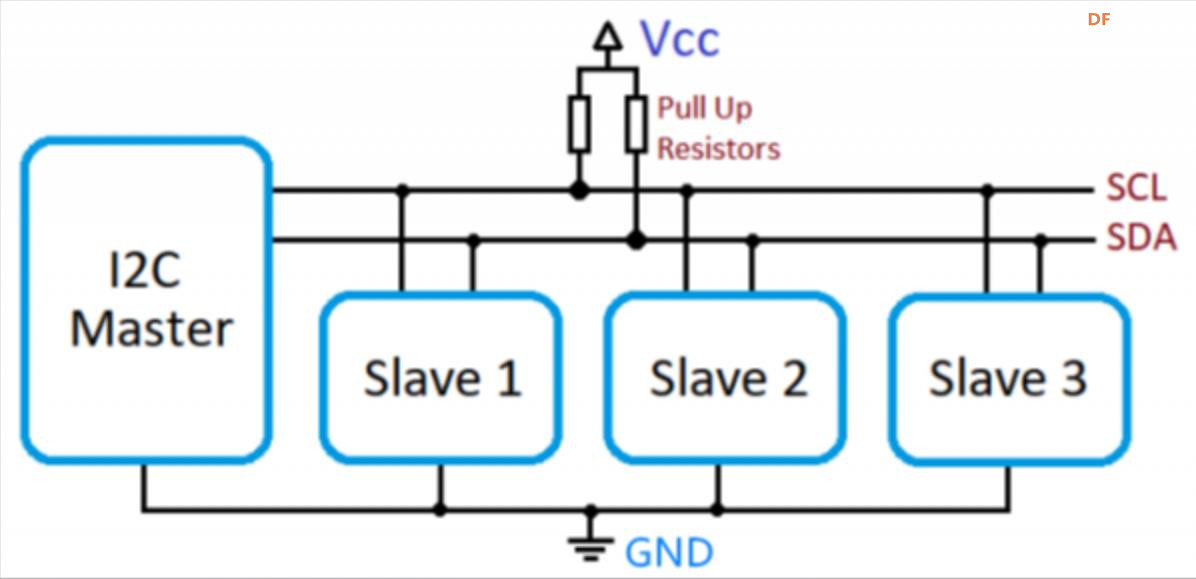 |
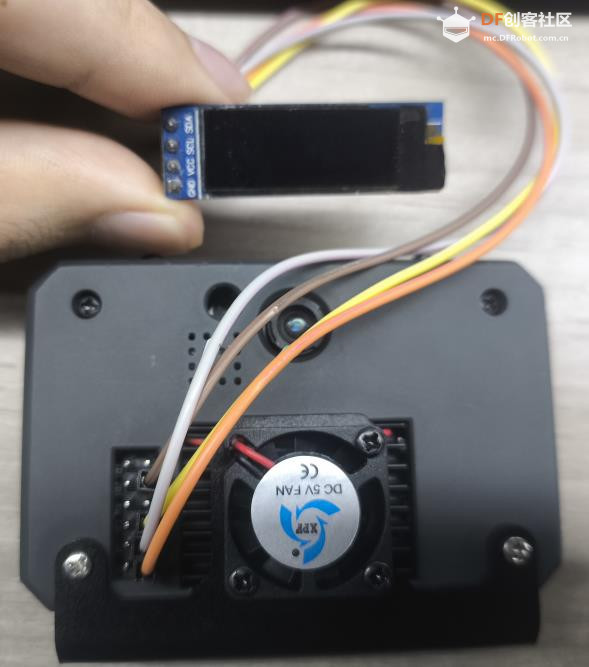
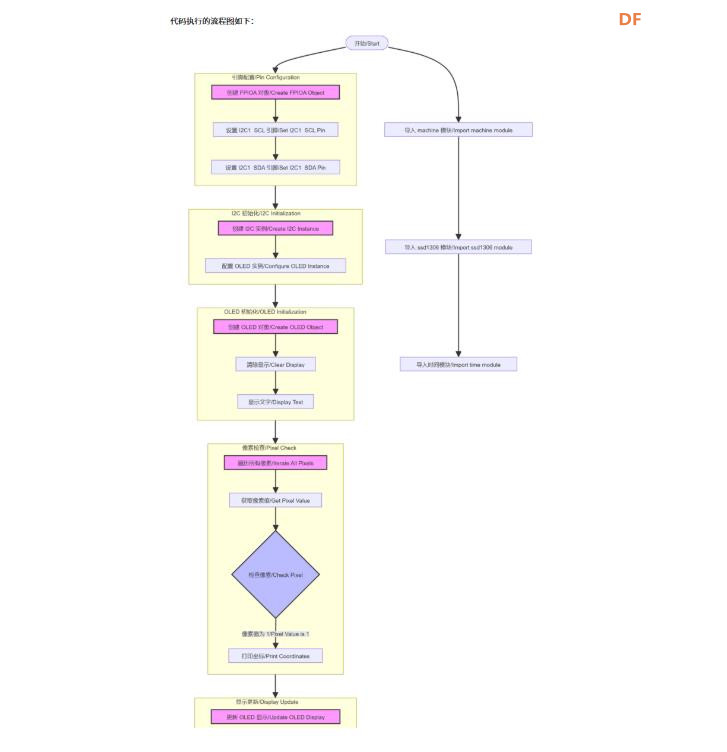
项目测试实验代码 |
|
关键知识点补充: 1、I2C总线特点: 双线制(SCL时钟线 + SDA数据线) 多主多从架构 地址寻址通信 2、SSD1306显示屏: 常见的128x32或128x64分辨率OLED驱动芯片 使用I2C接口时默认地址通常是0x3C或0x3D 3、FPIOA的重要性: K230芯片的特色功能,引脚功能可编程 必须正确配置才能使用各种外设功能 提供了极大的硬件连接灵活性 4、双缓冲显示: 绘图操作先在内存缓冲区进行 show()方法将缓冲区内容一次性发送到显示屏 避免闪烁,提高显示效率 这个示例完整展示了从硬件配置到应用层操作的完整I2C设备驱动流程。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






