|
1164| 3
|
[项目] 【花雕动手做】CanMV K230 AI 视觉识别之线段检测 |
 什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。   |
|
线段检测是计算机视觉中的基础任务,核心是从图像中识别并提取连续的直线段(如物体边缘、建筑轮廓、道路标线等),广泛用于场景理解、目标定位、图像分割等上层应用。 1、核心原理 线段检测的本质是识别图像中 “像素灰度值突变的连续区域”(即边缘),再通过算法拟合出直线段,核心步骤包括: 边缘检测:先提取图像中像素灰度变化剧烈的区域(如用 Canny 算子、Sobel 算子),得到边缘二值图。 直线拟合:对边缘像素进行分组,用数学方法(如霍夫变换、最小二乘法)拟合出直线,再截取有效线段(过滤短线段、重叠线段)。 后处理:去除噪声线段(如长度过短、角度异常)、合并重叠 / 相邻线段,得到最终的线段结果(通常以 “起点坐标 (x1,y1)、终点坐标 (x2,y2)” 表示)。 2、主流算法(按效率和精度分类) 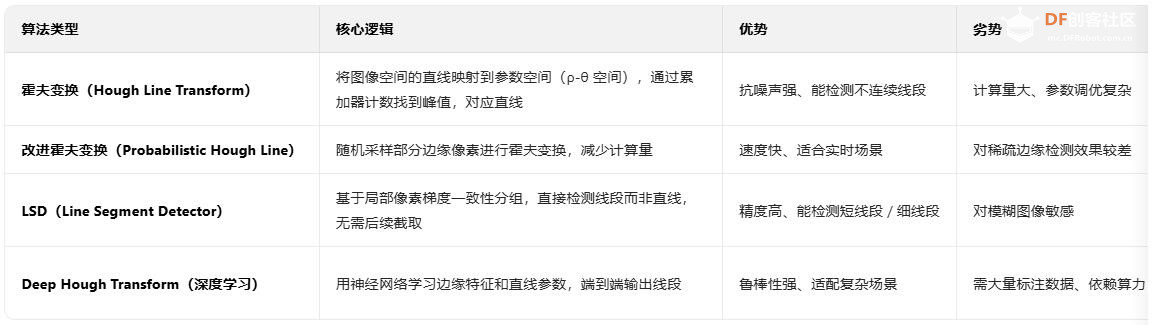 3、典型应用场景 工业检测:检测产品轮廓的直线段(如电路板引脚是否笔直、金属件边缘是否平整)。 自动驾驶:识别道路标线(实线 / 虚线)、车道边界,辅助车辆定位和路径规划。 文档处理:扫描文档中提取文字行、表格边框,实现文档结构化(如 PDF 表格提取)。 机器人视觉:检测环境中的线段(如墙角、栏杆),用于 SLAM 建图、障碍物避让。 医学影像:提取 CT/MRI 图像中的骨骼边缘线段,辅助病变诊断(如骨折检测)。 4、实操示例(OpenCV 实现 LSD 线段检测) OpenCV 内置了 LSD 算法接口,无需复杂封装,直接调用即可: python 5、关键优化技巧(提升检测效果) 图像预处理:检测前对图像进行降噪(如高斯模糊cv2.GaussianBlur)、增强对比度(如直方图均衡化),减少噪声线段干扰。 参数调优: 霍夫变换:调整rho(距离步长)、theta(角度步长)、threshold(累加器阈值),过滤虚假线段。 LSD:调整scale(检测尺度)、sigma_scale(高斯平滑系数),平衡精度和速度。 后处理过滤:设置线段长度阈值(如只保留长度 > 30 像素的线段)、角度阈值(如只保留水平 / 垂直线段),去除无效结果。 硬件加速:在 K230 等边缘设备上,可通过 NPU 加速边缘检测或线段拟合步骤,降低延迟(如用 Tengine-Lite 部署轻量化线段检测模型)。    |
|
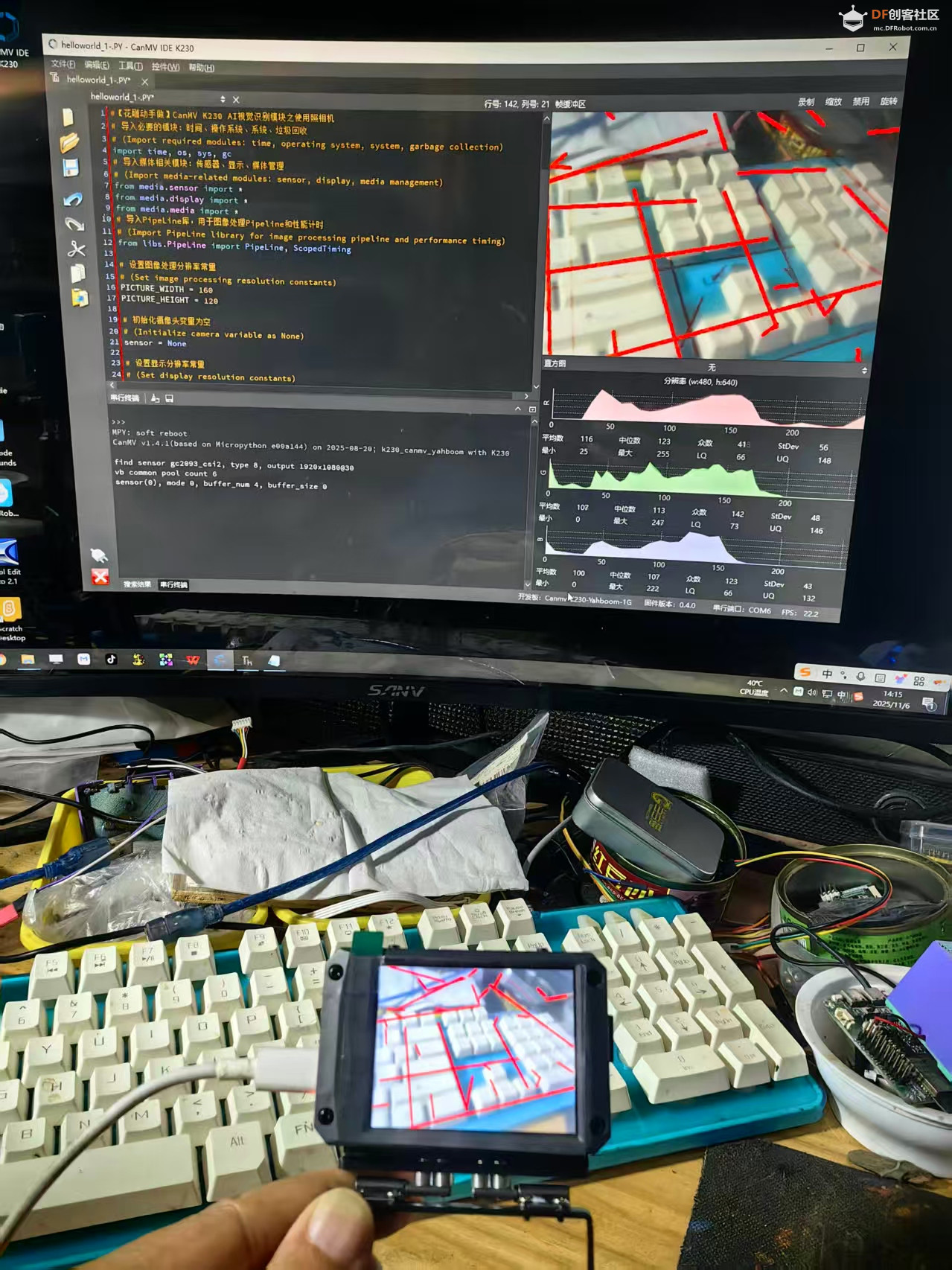
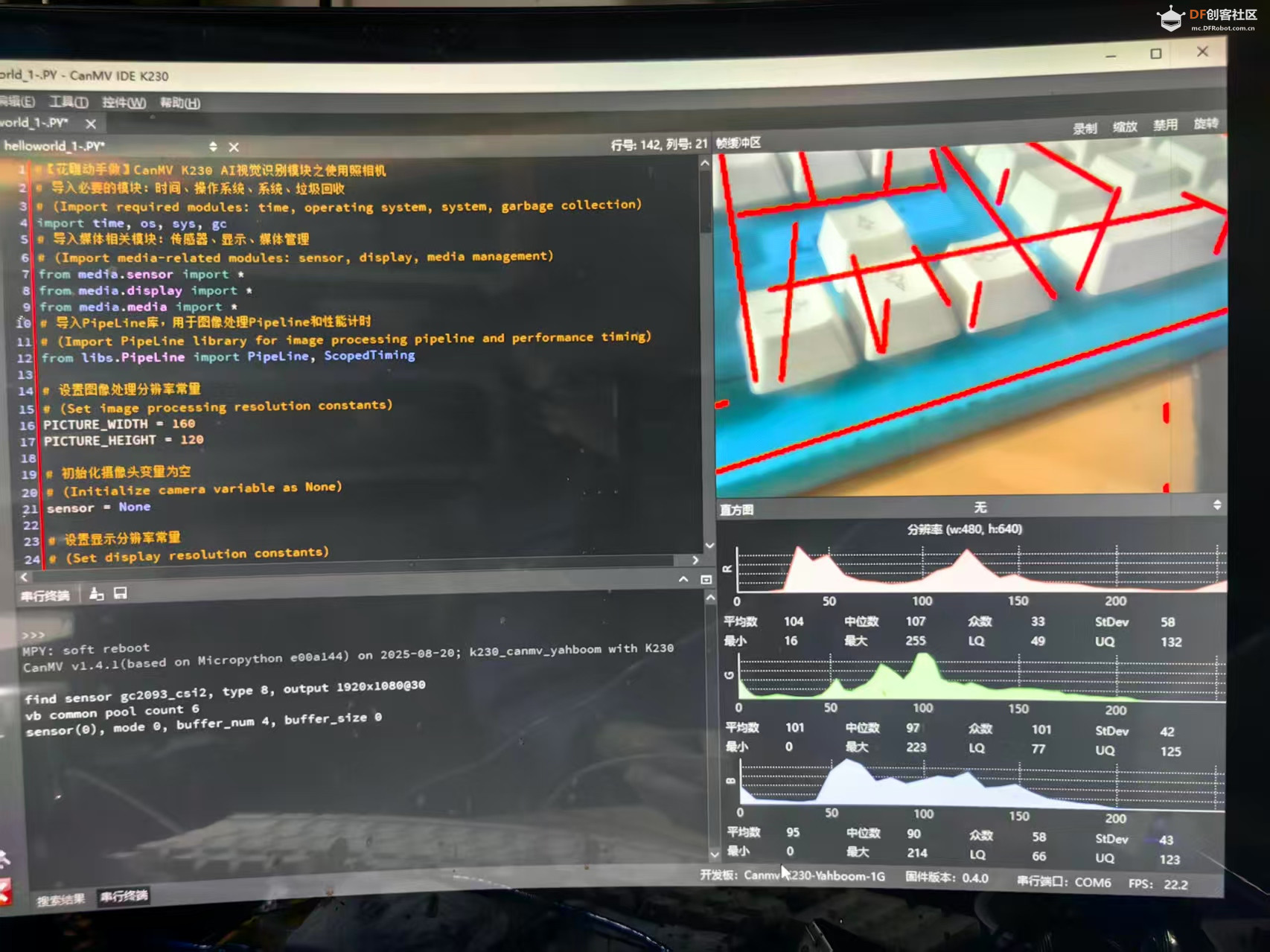
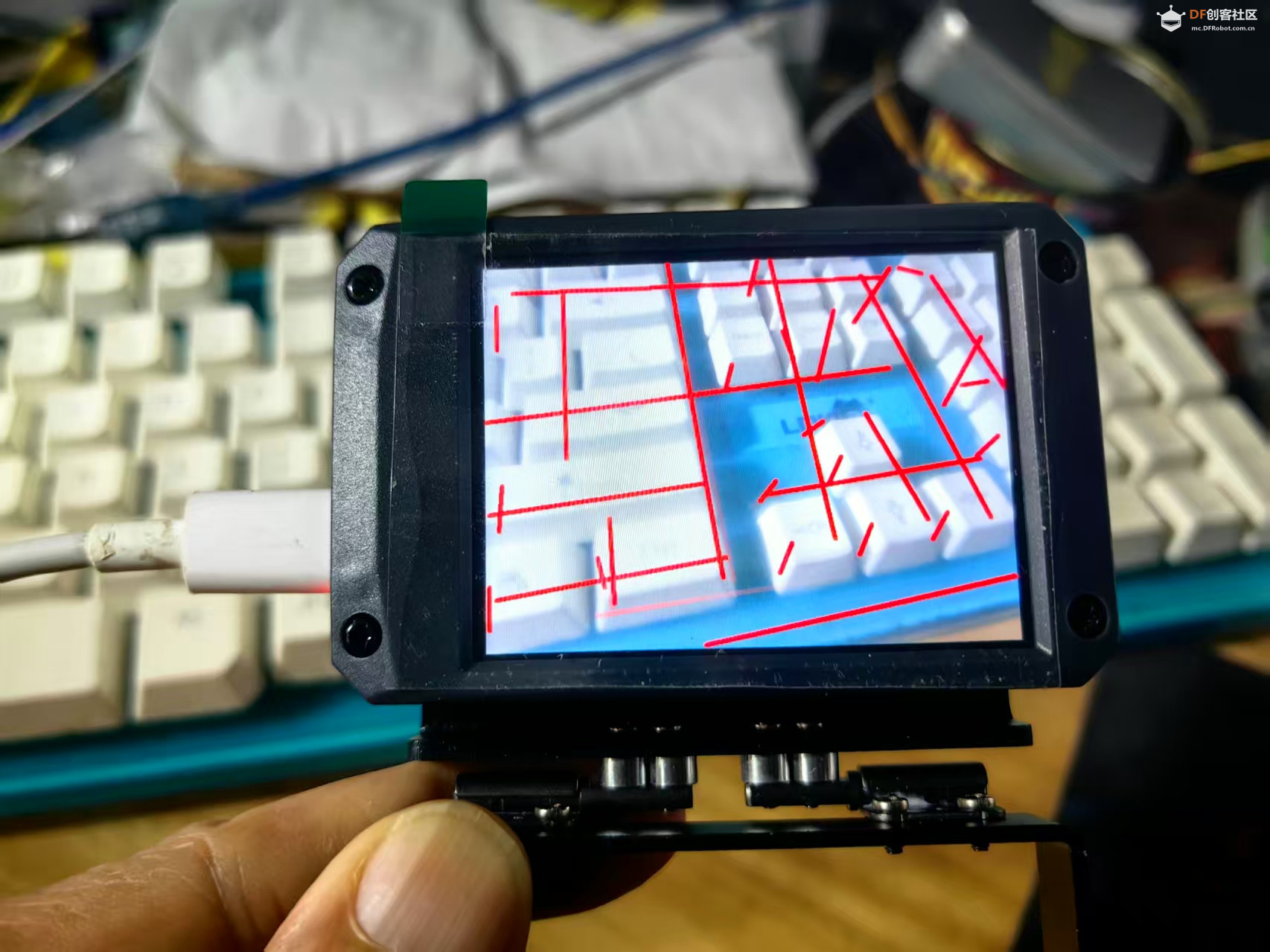
【花雕动手做】CanMV K230 AI 视觉识别模块之线段检测 项目测试实验代码 代码解读: 程序总体功能 这是一个基于CanMV K230的实时线段检测系统,采用双分辨率处理策略在视频流中实时识别并绘制图像中的线段。 系统架构与处理流程 核心处理管道 text 摄像头采集 → 低分辨率处理(160×120) → 线段检测算法 → 坐标缩放映射 → 高分辨率显示(640×480) 1. 双分辨率策略设计 python 设计原理: 处理分辨率:160×120(19,200像素) 显示分辨率:640×480(307,200像素) 性能提升:计算量减少 94%,大幅提高检测速度 核心技术组件详解 1. PipeLine图像处理管道 python 技术特点: 硬件加速:利用K230专用媒体处理单元 多路输出:支持不同尺寸的输入和输出流 通道管理:通道1专用于线段检测处理 2. 线段检测算法 python 算法参数解析: merge_distance=15:合并距离阈值 作用:将距离相近的线段合并为一条 效果:减少重复检测,优化结果显示 max_theta_diff=10:最大角度差异 作用:将角度相近的线段进行合并 效果:消除微小角度差异造成的重复线段 3. 坐标缩放核心算法 python 数学映射关系: text 低分辨率坐标(160×120) → 高分辨率坐标(640×480) (x, y) → (4x, 4y) 算法步骤: 提取原始线段端点坐标 应用4倍缩放比例 四舍五入为整数坐标 返回缩放后的坐标 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶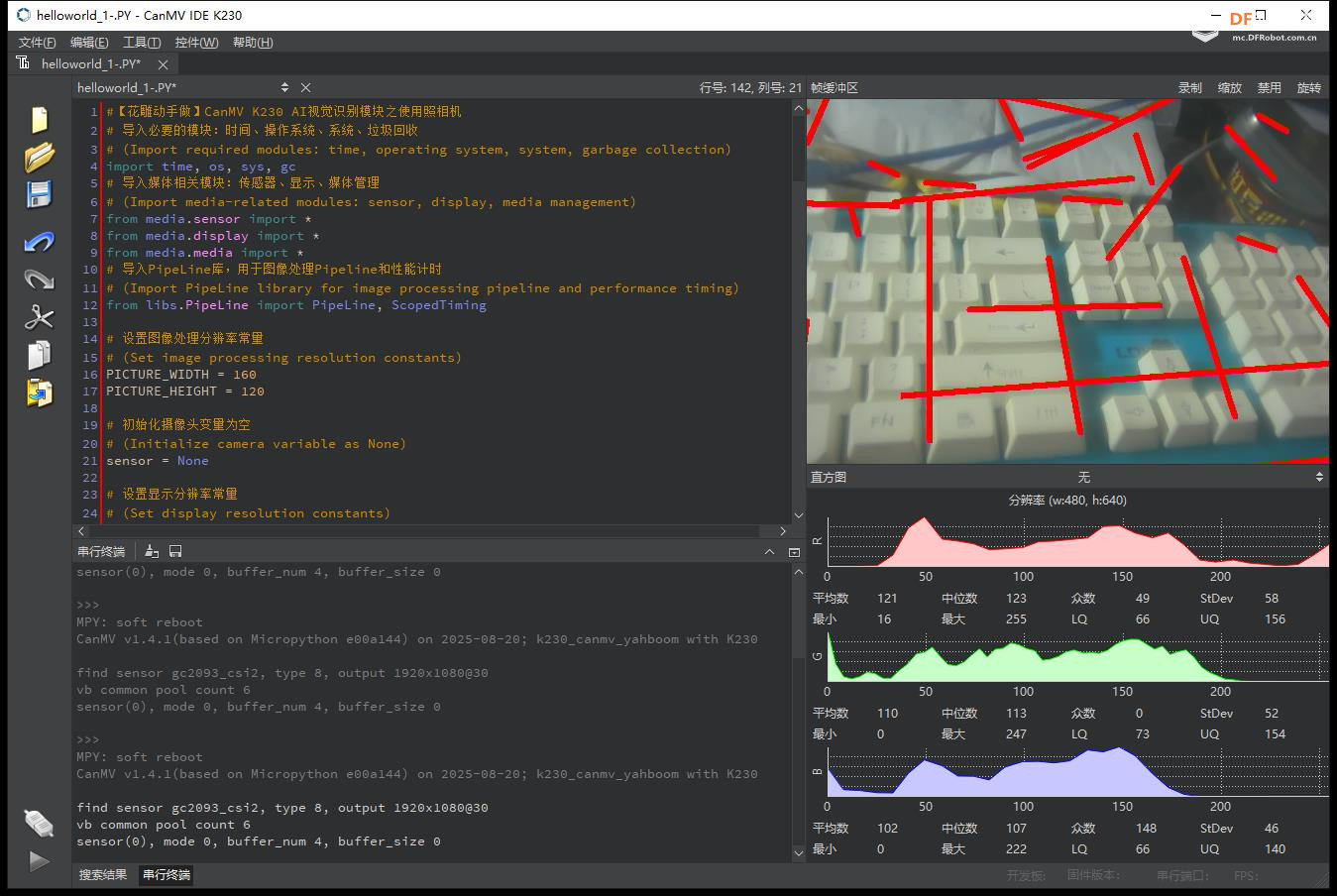

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






