【花雕动手做】CanMV K230 AI 视觉识别模块之优化的三角形检测算法
项目测试实验代码
- #【花雕动手做】CanMV K230 AI 视觉识别模块之检测三角形
-
- # 优化的三角形检测算法 / Optimized Triangle Detection Algorithm
- # 专门针对黑色实心三角形在白色背景上的检测 / Specifically for black solid triangles on white background
-
- import time, os, sys, math
- from media.sensor import *
- from media.display import *
- from media.media import *
-
- # 图像分辨率设置 / Image resolution settings
- PICTURE_WIDTH = 640 # 降低分辨率提高帧率 / Lower resolution for better FPS
- PICTURE_HEIGHT = 480
-
- # 摄像头配置 / Camera configuration
- sensor = None
-
- # 显示模式选择 / Display mode selection
- DISPLAY_MODE = "LCD"
-
- # 绘制控制参数 / Drawing control parameters
- DRAW_GENERAL_TRIANGLES = False # 是否绘制普通三角形(绿色)/ Whether to draw general triangles (green)
-
- # 根据显示模式设置分辨率 / Set resolution based on display mode
- if DISPLAY_MODE == "VIRT":
- DISPLAY_WIDTH = ALIGN_UP(1920, 16)
- DISPLAY_HEIGHT = 1080
- elif DISPLAY_MODE == "LCD":
- DISPLAY_WIDTH = 640
- DISPLAY_HEIGHT = 480
- else:
- raise ValueError("Unknown DISPLAY_MODE, please select 'VIRT', 'LCD'")
-
- # 创建时钟对象用于FPS计算 / Create clock object for FPS calculation
- clock = time.clock()
-
- def distance(p1, p2):
- """计算两点间距离 / Calculate distance between two points"""
- return math.sqrt((p1[0] - p2[0])**2 + (p1[1] - p2[1])**2)
-
- def calculate_angle(p1, p2, p3):
- """计算三点构成的角度 / Calculate angle formed by three points"""
- try:
- # 向量 p2->p1 和 p2->p3 / Vectors p2->p1 and p2->p3
- v1 = (p1[0] - p2[0], p1[1] - p2[1])
- v2 = (p3[0] - p2[0], p3[1] - p2[1])
-
- # 计算向量长度 / Calculate vector lengths
- len1 = math.sqrt(v1[0]**2 + v1[1]**2)
- len2 = math.sqrt(v2[0]**2 + v2[1]**2)
-
- if len1 == 0 or len2 == 0:
- return 0
-
- # 计算夹角余弦值 / Calculate cosine of the angle
- cos_angle = (v1[0]*v2[0] + v1[1]*v2[1]) / (len1 * len2)
- cos_angle = max(-1, min(1, cos_angle)) # 限制在[-1,1]范围内 / Clamp to [-1,1] range
-
- # 转换为角度 / Convert to degrees
- angle = math.acos(cos_angle) * 180 / math.pi
- return angle
- except:
- return 0
-
- def is_equilateral_triangle(corners, side_tolerance=0.2, angle_tolerance=20):
- """
- 判断三个角点是否构成等边三角形 / Check if three corners form an equilateral triangle
-
- 参数 / Parameters:
- corners: 三个角点的坐标列表 / List of three corner coordinates
- side_tolerance: 边长相对误差容忍度 / Side length relative tolerance (0.15 = 15%)
- angle_tolerance: 角度误差容忍度 / Angle tolerance in degrees
-
- 返回 / Returns:
- bool: 是否为等边三角形 / Whether it's an equilateral triangle
- """
- if len(corners) != 3:
- return False
-
- # 计算三边长度 / Calculate three side lengths
- side1 = distance(corners[0], corners[1])
- side2 = distance(corners[1], corners[2])
- side3 = distance(corners[2], corners[0])
-
- # 检查边长是否过小 / Check if sides are too small
- if side1 < 10 or side2 < 10 or side3 < 10:
- return False
-
- # 方法1: 检查三边长度是否相等(允许相对误差)/ Method 1: Check if three sides are equal (with relative tolerance)
- avg_side = (side1 + side2 + side3) / 3
- side1_diff = abs(side1 - avg_side) / avg_side
- side2_diff = abs(side2 - avg_side) / avg_side
- side3_diff = abs(side3 - avg_side) / avg_side
-
- sides_equal = (side1_diff <= side_tolerance and
- side2_diff <= side_tolerance and
- side3_diff <= side_tolerance)
-
- # 方法2: 检查三个内角是否都接近60度 / Method 2: Check if three angles are close to 60 degrees
- angle1 = calculate_angle(corners[0], corners[1], corners[2])
- angle2 = calculate_angle(corners[1], corners[2], corners[0])
- angle3 = calculate_angle(corners[2], corners[0], corners[1])
-
- angles_equal = (abs(angle1 - 60) <= angle_tolerance and
- abs(angle2 - 60) <= angle_tolerance and
- abs(angle3 - 60) <= angle_tolerance)
-
- # 两种方法都满足才认为是等边三角形 / Both methods must be satisfied
- return sides_equal and angles_equal
-
- def is_valid_triangle(corners, min_area=100, max_area=10000, angle_tolerance=20):
- """
- 判断三个角点是否构成有效三角形 / Check if three corners form a valid triangle
-
- 参数 / Parameters:
- corners: 三个角点的坐标列表 / List of three corner coordinates
- min_area: 最小面积阈值 / Minimum area threshold
- max_area: 最大面积阈值 / Maximum area threshold
- angle_tolerance: 角度容忍度 / Angle tolerance
-
- 返回 / Returns:
- bool: 是否为有效三角形 / Whether it's a valid triangle
- """
- if len(corners) != 3:
- return False
-
- # 计算三边长度 / Calculate three side lengths
- side1 = distance(corners[0], corners[1])
- side2 = distance(corners[1], corners[2])
- side3 = distance(corners[2], corners[0])
-
- # 计算面积 / Calculate area using cross product
- area = abs((corners[1][0] - corners[0][0]) * (corners[2][1] - corners[0][1]) -
- (corners[2][0] - corners[0][0]) * (corners[1][1] - corners[0][1])) / 2
-
- # 计算三个内角 / Calculate three interior angles
- angle1 = calculate_angle(corners[0], corners[1], corners[2])
- angle2 = calculate_angle(corners[1], corners[2], corners[0])
- angle3 = calculate_angle(corners[2], corners[0], corners[1])
-
- # 检查角度是否合理(三角形内角和应该接近180度)/ Check if angles are reasonable
- angle_sum = angle1 + angle2 + angle3
- if abs(angle_sum - 180) > 30: # 允许一定误差 / Allow some error
- return False
-
- # 检查是否有过小的角度 / Check for too small angles
- if angle1 < 20 or angle2 < 20 or angle3 < 20:
- return False
-
- return True
-
- def find_triangles_from_contours(img):
- """
- 使用轮廓检测寻找三角形 / Find triangles using contour detection
-
- 参数 / Parameters:
- img: 输入图像 / Input image
-
- 返回 / Returns:
- list: 检测到的三角形列表 / List of detected triangles
- """
- triangles = []
-
- try:
- # 转换为灰度图像进行边缘检测 / Convert to grayscale for edge detection
- img_gray = img.to_grayscale()
-
- # 使用自适应阈值进行二值化 / Use adaptive threshold for binarization
- # 针对黑色三角形,使用反向阈值 / For black triangles, use inverted threshold
- img_binary = img_gray.binary([(0, 100)], invert=True) # 检测黑色区域 / Detect black regions
-
- # 寻找矩形作为候选区域 / Find rectangles as candidate regions
- rects = img_binary.find_rects(threshold=1000, roi=None)
-
- for rect in rects:
- corners = rect.corners()
- if corners is not None and len(corners) >= 3:
- # 尝试所有可能的三点组合 / Try all possible three-point combinations
- for i in range(len(corners)):
- for j in range(i+1, len(corners)):
- for k in range(j+1, len(corners)):
- triangle_corners = [corners[i], corners[j], corners[k]]
- if is_valid_triangle(triangle_corners):
- center = ((triangle_corners[0][0] + triangle_corners[1][0] + triangle_corners[2][0]) // 3,
- (triangle_corners[0][1] + triangle_corners[1][1] + triangle_corners[2][1]) // 3)
- area = abs((triangle_corners[1][0] - triangle_corners[0][0]) *
- (triangle_corners[2][1] - triangle_corners[0][1]) -
- (triangle_corners[2][0] - triangle_corners[0][0]) *
- (triangle_corners[1][1] - triangle_corners[0][1])) / 2
-
- # 检查是否为等边三角形 / Check if it's an equilateral triangle
- is_equilateral = is_equilateral_triangle(triangle_corners)
-
- triangles.append({
- 'corners': triangle_corners,
- 'center': center,
- 'area': area,
- 'is_equilateral': is_equilateral,
- 'type': 'equilateral' if is_equilateral else 'general'
- })
- break
- except Exception as e:
- pass
-
- return triangles
-
- def find_triangles_from_blobs(img):
- """
- 使用blob检测寻找三角形 / Find triangles using blob detection
-
- 参数 / Parameters:
- img: 输入图像 / Input image
-
- 返回 / Returns:
- list: 检测到的三角形列表 / List of detected triangles
- """
- triangles = []
-
- try:
- # 检测黑色blob / Detect black blobs
- blobs = img.find_blobs([(0, 50, -128, 127, -128, 127)],
- pixels_threshold=200,
- area_threshold=500,
- merge=True)
-
- for blob in blobs:
- # 获取blob的边界框 / Get blob bounding box
- x, y, w, h = blob.rect()
-
- # 检查长宽比是否合理 / Check if aspect ratio is reasonable
- aspect_ratio = max(w, h) / min(w, h)
- if aspect_ratio > 3: # 过于细长的形状可能不是三角形 / Too elongated shape may not be triangle
- continue
-
- # 使用blob的角点信息 / Use blob corner information
- if hasattr(blob, 'corners') and callable(blob.corners):
- corners = blob.corners()
- if corners is not None and len(corners) >= 3:
- # 选择最合适的三个角点 / Select the most suitable three corners
- best_triangle = None
- best_score = 0
-
- for i in range(len(corners)):
- for j in range(i+1, len(corners)):
- for k in range(j+1, len(corners)):
- triangle_corners = [corners[i], corners[j], corners[k]]
- if is_valid_triangle(triangle_corners):
- # 计算三角形质量分数 / Calculate triangle quality score
- area = abs((triangle_corners[1][0] - triangle_corners[0][0]) *
- (triangle_corners[2][1] - triangle_corners[0][1]) -
- (triangle_corners[2][0] - triangle_corners[0][0]) *
- (triangle_corners[1][1] - triangle_corners[0][1])) / 2
-
- # 分数基于面积和形状规整度 / Score based on area and shape regularity
- score = area
- if score > best_score:
- best_score = score
- best_triangle = triangle_corners
-
- if best_triangle:
- center = ((best_triangle[0][0] + best_triangle[1][0] + best_triangle[2][0]) // 3,
- (best_triangle[0][1] + best_triangle[1][1] + best_triangle[2][1]) // 3)
-
- # 检查是否为等边三角形 / Check if it's an equilateral triangle
- is_equilateral = is_equilateral_triangle(best_triangle)
-
- triangles.append({
- 'corners': best_triangle,
- 'center': center,
- 'area': best_score,
- 'is_equilateral': is_equilateral,
- 'type': 'equilateral' if is_equilateral else 'general'
- })
- except Exception as e:
- print(f"Error in blob detection: {e}")
-
- return triangles
-
- def find_triangles_optimized(img):
- """
- 优化的三角形检测主函数 / Optimized main triangle detection function
-
- 参数 / Parameters:
- img: 输入图像 / Input image
-
- 返回 / Returns:
- list: 检测到的三角形列表 / List of detected triangles
- """
- all_triangles = []
-
- # 方法1: 轮廓检测 / Method 1: Contour detection
- triangles1 = find_triangles_from_contours(img)
- all_triangles.extend(triangles1)
-
- # 方法2: Blob检测 / Method 2: Blob detection
- triangles2 = find_triangles_from_blobs(img)
- all_triangles.extend(triangles2)
-
- # 去重和筛选 / Remove duplicates and filter
- unique_triangles = []
- for triangle in all_triangles:
- is_duplicate = False
- for existing in unique_triangles:
- # 检查中心点距离 / Check center point distance
- center_dist = distance(triangle['center'], existing['center'])
- if center_dist < 20: # 如果中心点很近,认为是重复的 / If centers are close, consider duplicate
- is_duplicate = True
- break
-
- if not is_duplicate:
- unique_triangles.append(triangle)
-
- # 按面积排序,优先返回较大的三角形 / Sort by area, prioritize larger triangles
- unique_triangles.sort(key=lambda x: x['area'], reverse=True)
-
- return unique_triangles[:5] # 最多返回5个三角形 / Return at most 5 triangles
-
- def process_triangles(img, triangles):
- """处理检测到的三角形 / Process detected triangles"""
- print("【三角形检测结果 / Triangle Detection Results】")
- equilateral_count = 0
- general_count = 0
-
- for i, triangle in enumerate(triangles):
- corners = triangle['corners']
- center = triangle['center']
- area = triangle['area']
- is_equilateral = triangle.get('is_equilateral', False)
- triangle_type = triangle.get('type', 'general')
-
- # 统计三角形类型 / Count triangle types
- if is_equilateral:
- equilateral_count += 1
- else:
- general_count += 1
-
- # 根据三角形类型和控制参数决定是否绘制 / Draw based on triangle type and control parameters
- should_draw = False
- if is_equilateral:
- should_draw = True
- line_color = (255, 255, 0) # 黄色表示等边三角形 / Yellow for equilateral triangles
- corner_color = (255, 165, 0) # 橙色角点 / Orange corner points
- center_color = (255, 0, 255) # 紫色中心点 / Purple center point
- label = "EQUI"
- elif DRAW_GENERAL_TRIANGLES:
- should_draw = True
- line_color = (0, 255, 0) # 绿色表示普通三角形 / Green for general triangles
- corner_color = (255, 0, 0) # 红色角点 / Red corner points
- center_color = (0, 0, 255) # 蓝色中心点 / Blue center point
- label = "GEN"
-
- if should_draw:
- # 绘制三角形边框 / Draw triangle outline
- for j in range(3):
- start = corners[j]
- end = corners[(j + 1) % 3]
- img.draw_line(start[0], start[1], end[0], end[1], color=line_color, thickness=2)
-
- # 绘制角点 / Draw corner points
- for corner in corners:
- img.draw_circle(corner[0], corner[1], 4, color=corner_color, thickness=2)
-
- # 绘制中心点 / Draw center point
- img.draw_circle(center[0], center[1], 3, color=center_color, thickness=2)
-
- # 在三角形旁边显示类型标签 / Display type label next to triangle
- img.draw_string_advanced(center[0] + 10, center[1] - 10, 12, label, color=line_color, scale=1)
-
- # 计算边长 / Calculate side lengths
- side1 = distance(corners[0], corners[1])
- side2 = distance(corners[1], corners[2])
- side3 = distance(corners[2], corners[0])
-
- # 计算三个内角用于验证 / Calculate three angles for verification
- angle1 = calculate_angle(corners[0], corners[1], corners[2])
- angle2 = calculate_angle(corners[1], corners[2], corners[0])
- angle3 = calculate_angle(corners[2], corners[0], corners[1])
-
- print(f"Triangle {i+1} ({triangle_type.upper()}): Center({center[0]}, {center[1]}), Area: {area:.1f}")
- print(f" Corners: {corners}")
- print(f" Side lengths: {side1:.1f}, {side2:.1f}, {side3:.1f}")
- if is_equilateral:
- print(f" Angles: {angle1:.1f}°, {angle2:.1f}°, {angle3:.1f}°")
- print(f" ★ EQUILATERAL TRIANGLE DETECTED! ★")
-
- print(f"Total triangles found: {len(triangles)} (Equilateral: {equilateral_count}, General: {general_count})")
- print("【==============================】")
-
- try:
- # 初始化摄像头 / Initialize camera
- sensor = Sensor()
- sensor.reset()
-
- # 设置图像分辨率和格式 / Set image resolution and format
- sensor.set_framesize(width=PICTURE_WIDTH, height=PICTURE_HEIGHT, chn=CAM_CHN_ID_0)
- sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_0)
-
- # 初始化显示器 / Initialize display
- if DISPLAY_MODE == "VIRT":
- Display.init(Display.VIRT, width=DISPLAY_WIDTH, height=DISPLAY_HEIGHT, fps=60)
- elif DISPLAY_MODE == "LCD":
- Display.init(Display.ST7701, width=DISPLAY_WIDTH, height=DISPLAY_HEIGHT, to_ide=True)
-
- # 初始化媒体管理器 / Initialize media manager
- MediaManager.init()
- sensor.run()
-
- # 计算显示偏移量以居中显示 / Calculate display offsets for center alignment
- x_offset = (DISPLAY_WIDTH - PICTURE_WIDTH) // 2
- y_offset = (DISPLAY_HEIGHT - PICTURE_HEIGHT) // 2
-
- print("三角形检测已启动,请将黑色三角形放在白色背景前...")
- print("Triangle detection started, please place black triangles on white background...")
-
- while True:
- os.exitpoint()
- clock.tick() # 开始计时 / Start timing
-
- # 捕获图像 / Capture image
- img = sensor.snapshot(chn=CAM_CHN_ID_0)
-
- # 寻找三角形 / Find triangles
- triangles = find_triangles_optimized(img)
-
- # 处理检测到的三角形 / Process detected triangles
- equilateral_count = 0
- general_count = 0
- if len(triangles) > 0:
- process_triangles(img, triangles)
- # 统计等边三角形数量 / Count equilateral triangles
- for triangle in triangles:
- if triangle.get('is_equilateral', False):
- equilateral_count += 1
- else:
- general_count += 1
-
- # 显示FPS / Display FPS
- fps = clock.fps()
- print(f"FPS: {fps:.1f}")
-
- # 在图像上显示信息 / Display information on image
- img.draw_string_advanced(10, 10, 15, f"FPS: {fps:.1f}", color=(255, 255, 255), scale=2)
- img.draw_string_advanced(10, 30, 15, f"Total: {len(triangles)}", color=(255, 255, 255), scale=2)
- if equilateral_count > 0:
- img.draw_string_advanced(10, 50, 15, f"Equilateral: {equilateral_count}", color=(255, 255, 0), scale=2)
- if general_count > 0 and DRAW_GENERAL_TRIANGLES:
- img.draw_string_advanced(10, 70, 15, f"General: {general_count}", color=(0, 255, 0), scale=2)
-
- # 居中显示图像 / Display image centered
- Display.show_image(img, x=x_offset, y=y_offset)
-
- except KeyboardInterrupt as e:
- print("User Stop: ", e)
- except BaseException as e:
- print(f"Exception: {e}")
- finally:
- # 清理资源 / Cleanup resources
- if isinstance(sensor, Sensor):
- sensor.stop()
- Display.deinit()
- os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
- time.sleep_ms(100)
- MediaManager.deinit()
代码解读:
程序总体功能
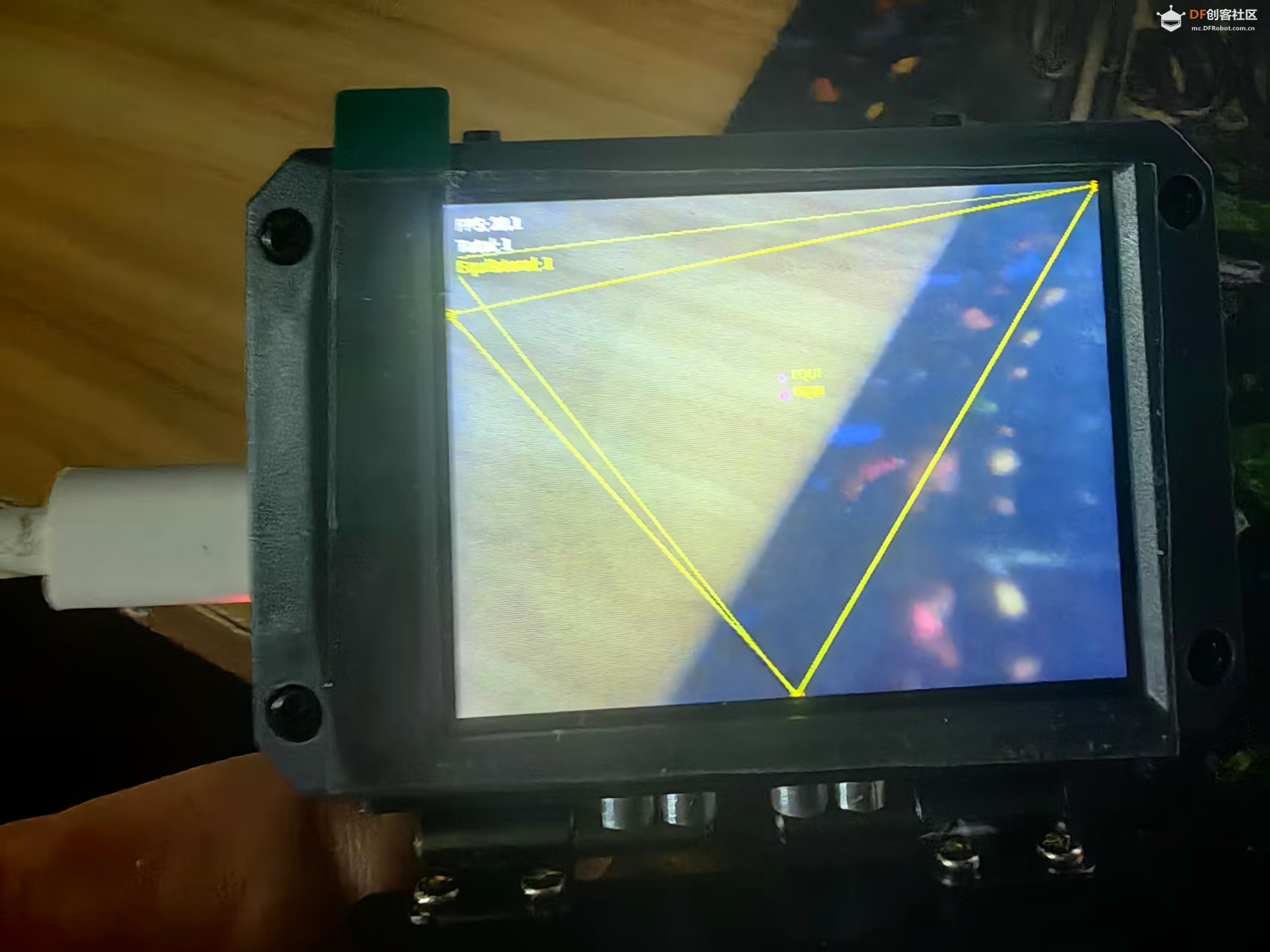
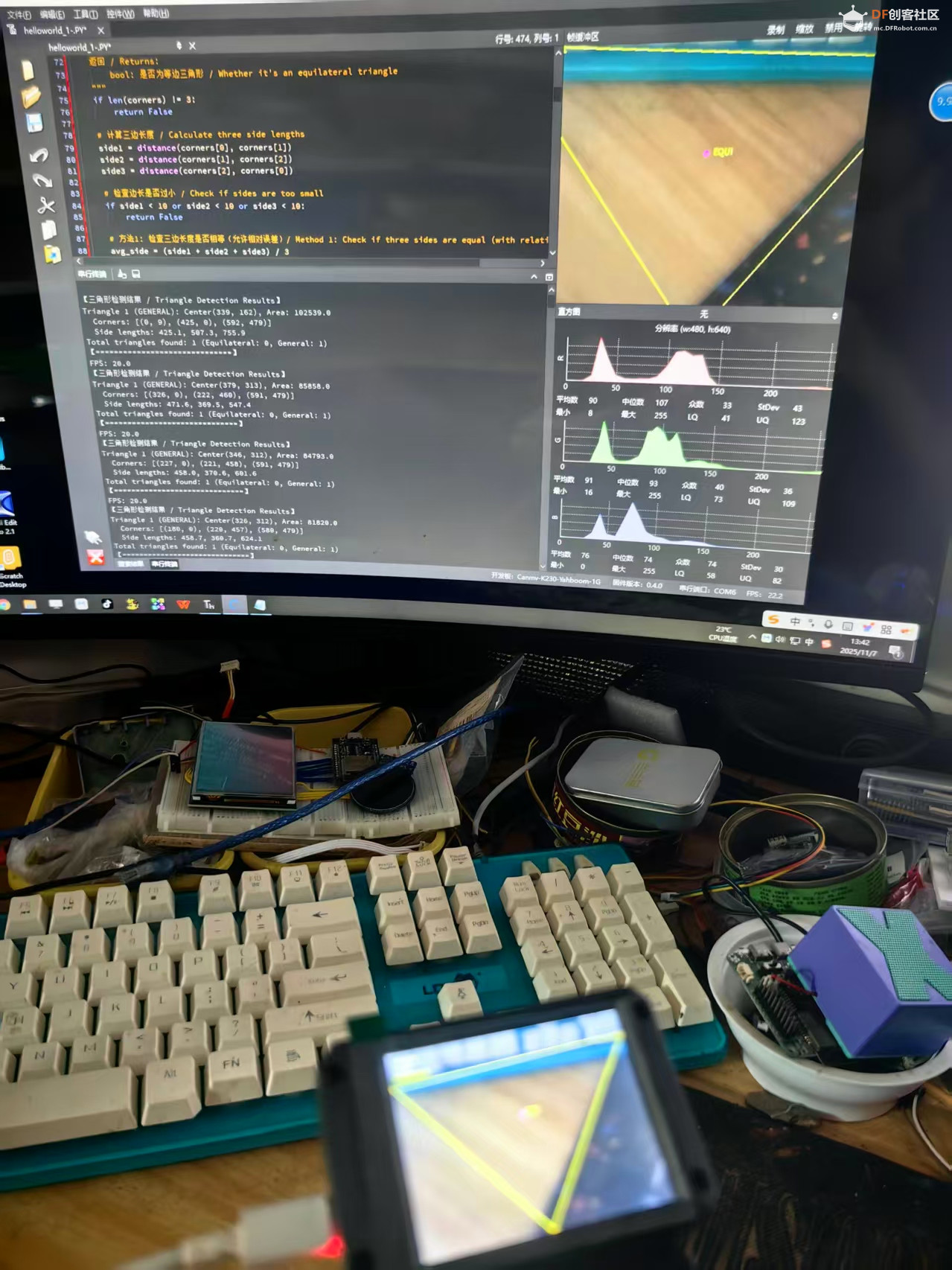
这是一个基于CanMV K230的高级实时三角形检测与分类系统,专门针对黑色实心三角形在白色背景上的检测,能够区分等边三角形和普通三角形。
系统架构设计
核心处理流程
text
图像采集 → 双算法检测 → 几何验证 → 等边分类 → 去重排序 → 可视化输出
1. 双算法融合架构
python
- def find_triangles_optimized(img):
-
- triangles1 = find_triangles_from_contours(img) # 轮廓检测
-
- triangles2 = find_triangles_from_blobs(img) # 区域检测
双重检测策略:
轮廓检测:基于形状边界的精确几何检测
Blob检测:基于区域特征的快速区域检测
优势互补:提高不同场景下的检测成功率
核心技术组件详解
1. 几何验证系统
等边三角形验证算法
python
- def is_equilateral_triangle(corners, side_tolerance=0.2, angle_tolerance=20):
双重验证机制:
边长验证:三边长度相对误差 ≤ 20%
python
- side1_diff = abs(side1 - avg_side) / avg_side ≤ 0.2
角度验证:三个内角接近60° ± 20°
python
复制代码
必须同时满足:确保几何特征的严格性
三角形有效性检查
python
- def is_valid_triangle(corners):
有效性标准:
角度和验证:180° ± 30°(三角形基本定理)
最小角度限制:每个角 ≥ 20°(避免过于尖锐)
面积计算:使用向量叉积法精确计算
2. 双检测算法实现
轮廓检测方法
python
- def find_triangles_from_contours(img):
处理流程:
灰度转换:img.to_grayscale()
二值化:反向阈值 (0, 100), invert=True 检测黑色区域
矩形检测:find_rects(threshold=1000) 获取候选区域
角点组合:从矩形角点中尝试所有三点组合
几何验证:对每个组合进行三角形验证
Blob检测方法
python
- def find_triangles_from_blobs(img):
处理流程:
颜色空间检测:在LAB颜色空间中检测黑色区域
区域过滤:基于像素数、面积、长宽比过滤
角点分析:从blob角点中选择最佳三点组合
质量评分:基于面积选择最优三角形
3. 数学计算核心
距离计算
python
- def distance(p1, p2):
-
- return math.sqrt((p1[0] - p2[0])**2 + (p1[1] - p2[1])**2)
欧几里得距离公式
用于计算三角形边长
角度计算
python
- def calculate_angle(p1, p2, p3):
向量几何方法:
向量构造:v1 = p1→p2, v2 = p3→p2
点积计算:v1·v2 = |v1||v2|cosθ
角度求解:θ = arccos((v1·v2)/(|v1||v2|))
面积计算
python
- area = abs((x2-x1)*(y3-y1) - (x3-x1)*(y2-y1)) / 2
基于向量叉积的三角形面积公式
准确且计算高效
性能优化策略
1. 多级过滤机制
text
原始候选 → 几何验证 → 等边分类 → 中心点去重 → 面积排序 → 数量限制
2. 智能参数配置
python
- # 检测参数
-
- side_tolerance=0.2 # 20%边长误差容忍度
-
- angle_tolerance=20 # 20°角度误差容忍度
-
- pixels_threshold=200 # Blob最小像素数
-
- area_threshold=500 # 最小区域面积
-
-
-
- # 显示控制
-
- DRAW_GENERAL_TRIANGLES = False # 只显示等边三角形,减少视觉干扰
-
- 3. 结果优化处理
-
- python
-
- # 去重:基于中心点距离
-
- center_dist = distance(triangle['center'], existing['center']) < 20
-
-
-
- # 排序:按面积降序
-
- unique_triangles.sort(key=lambda x: x['area'], reverse=True)
-
-
-
- # 限制:最多返回5个
-
- return unique_triangles[:5]
可视化系统设计
颜色编码体系
python
- # 等边三角形视觉元素
-
- line_color = (255, 255, 0) # 黄色边框 - 突出显示
-
- corner_color = (255, 165, 0) # 橙色角点 - 关键特征
-
- center_color = (255, 0, 255) # 紫色中心 - 重心位置
-
- label = "EQUI" # 类型标识
-
-
-
- # 普通三角形视觉元素(可选显示)
-
- line_color = (0, 255, 0) # 绿色边框
-
- corner_color = (255, 0, 0) # 红色角点
-
- center_color = (0, 0, 255) # 蓝色中心
信息显示层级
python
- # 实时性能监控
-
- img.draw_string_advanced(10, 10, 15, f"FPS: {fps:.1f}", color=(255,255,255))
-
-
-
- # 检测结果统计
-
- img.draw_string_advanced(10, 30, 15, f"Total: {len(triangles)}", color=(255,255,255))
-
-
-
- # 等边三角形计数(突出显示)
-
- img.draw_string_advanced(10, 50, 15, f"Equilateral: {equilateral_count}", color=(255,255,0))
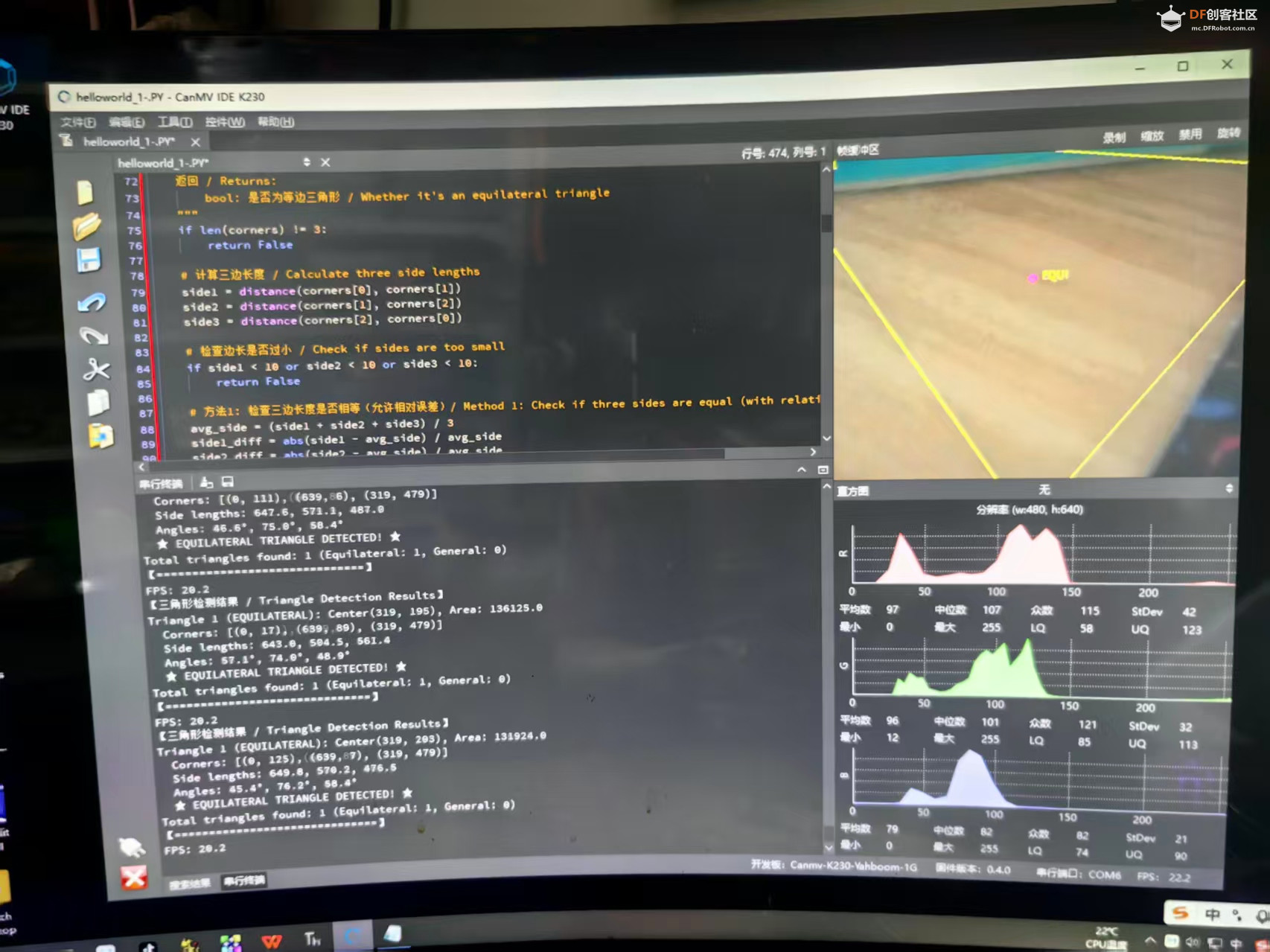
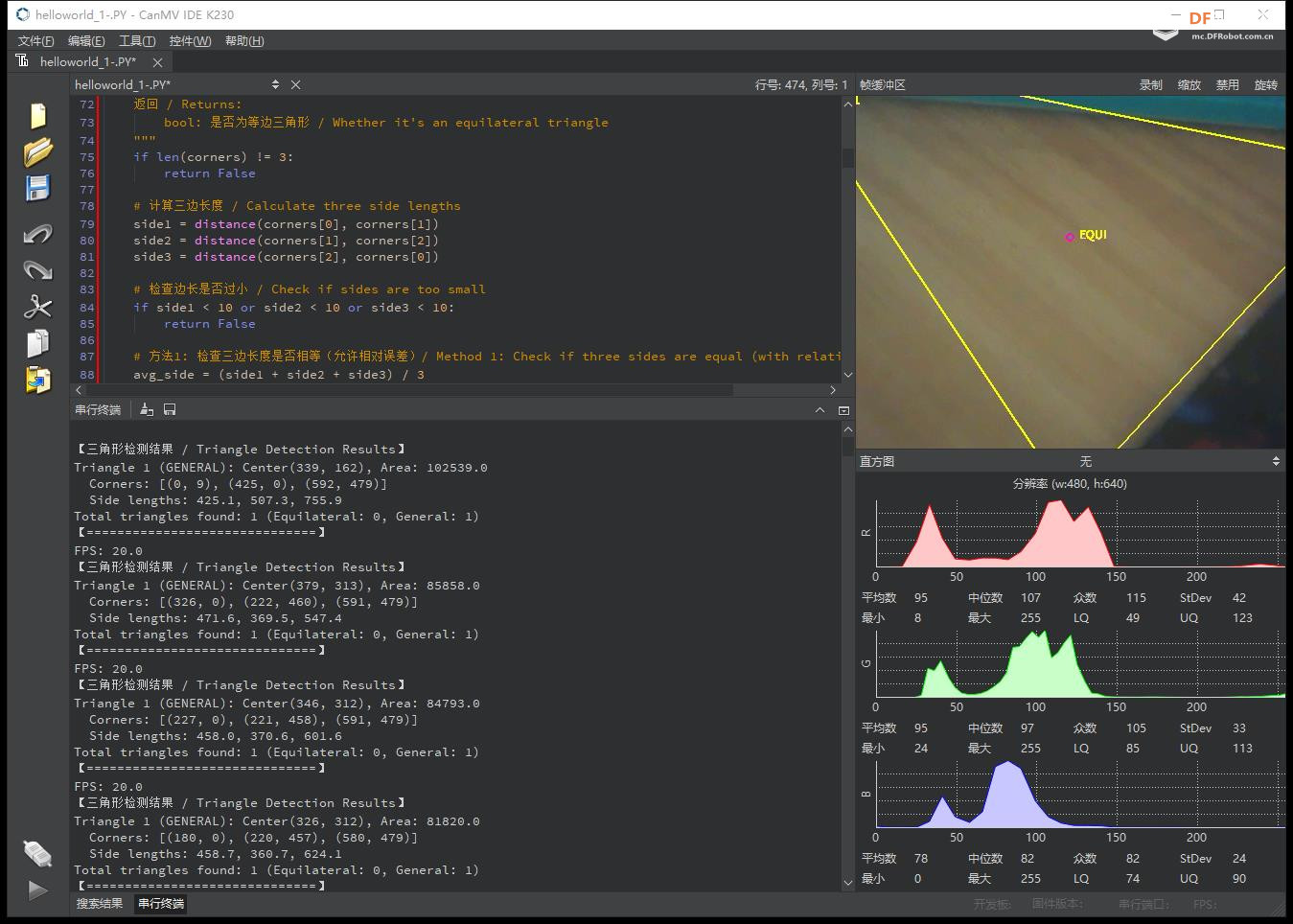
控制台详细输出
text
【三角形检测结果】
Triangle 1 (EQUI): Center(320, 240), Area: 1250.5
Corners: [(300,200), (340,200), (320,280)]
Side lengths: 40.0, 44.7, 44.7
Angles: 60.5°, 59.8°, 59.7°
★ EQUILATERAL TRIANGLE DETECTED! ★
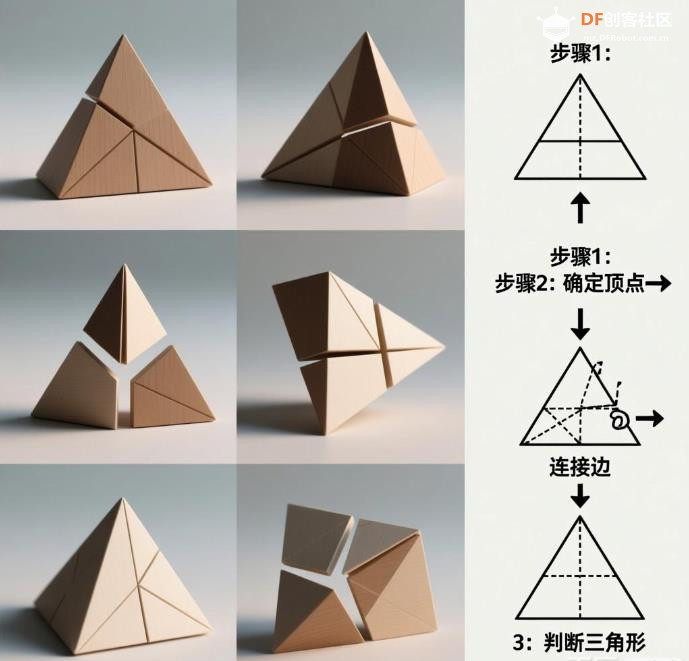
算法工作流程
实时处理流水线
text
1. 图像采集 → 2. 双算法并行检测 → 3. 几何验证 →
4. 等边分类 → 5. 去重排序 → 6. 可视化渲染 → 7. 结果显示
|






 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶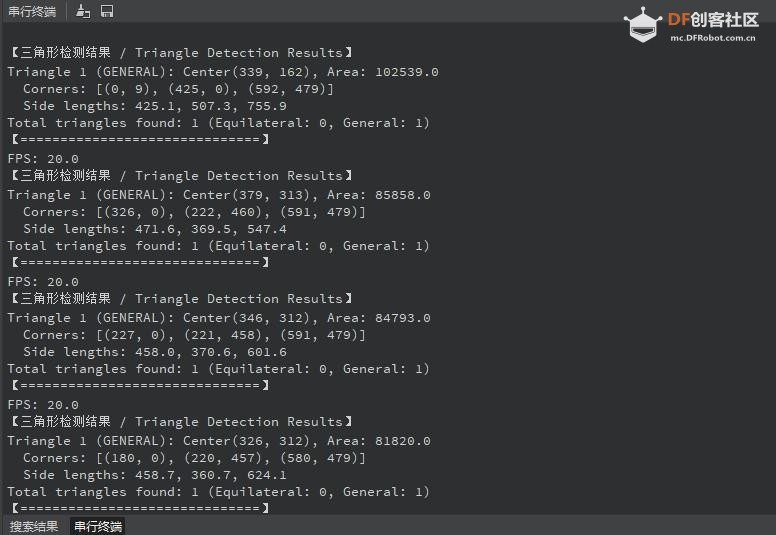

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






