|
2240| 0
|
[项目分享] 二哈2“标签编程师”:给孩子一台无屏幕编程机器人 |

|
本帖最后由 云天 于 2026-1-10 21:57 编辑 【项目背景】 让编程看得见、摸得着 在数字时代,编程已成为一种基础素养。然而,让孩子过早面对闪烁的屏幕和抽象的代码,不仅影响视力,更可能扼杀兴趣。我们想创造一种截然不同的启蒙方式——用双手“搭积木”的方式学习编程逻辑。 “标签编程师”四足蜘蛛机器人就此诞生。它是一套完全脱离屏幕的实体编程系统,孩子们通过排列真实的激光切割标签来指挥机器人行动,在物理世界中直观地理解“序列”、“循环”和“条件”等核心编程概念。 【系统设计】1.为孩子的双手和好奇心而造1. 交互设计:像玩桌游一样编程
使用激光切割制作标签,标签为5*5cm。 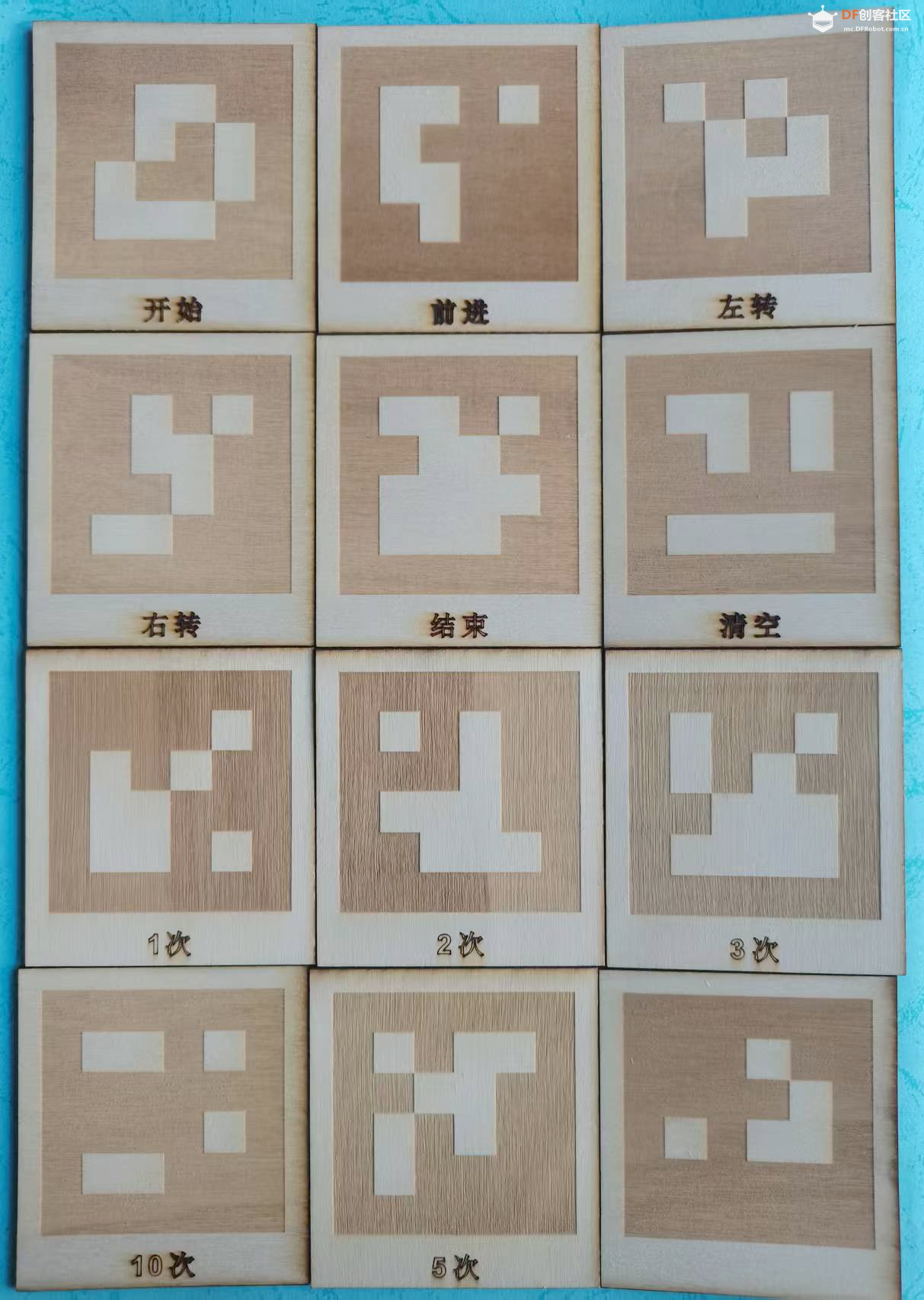 【材料清单】 遥控功能测试 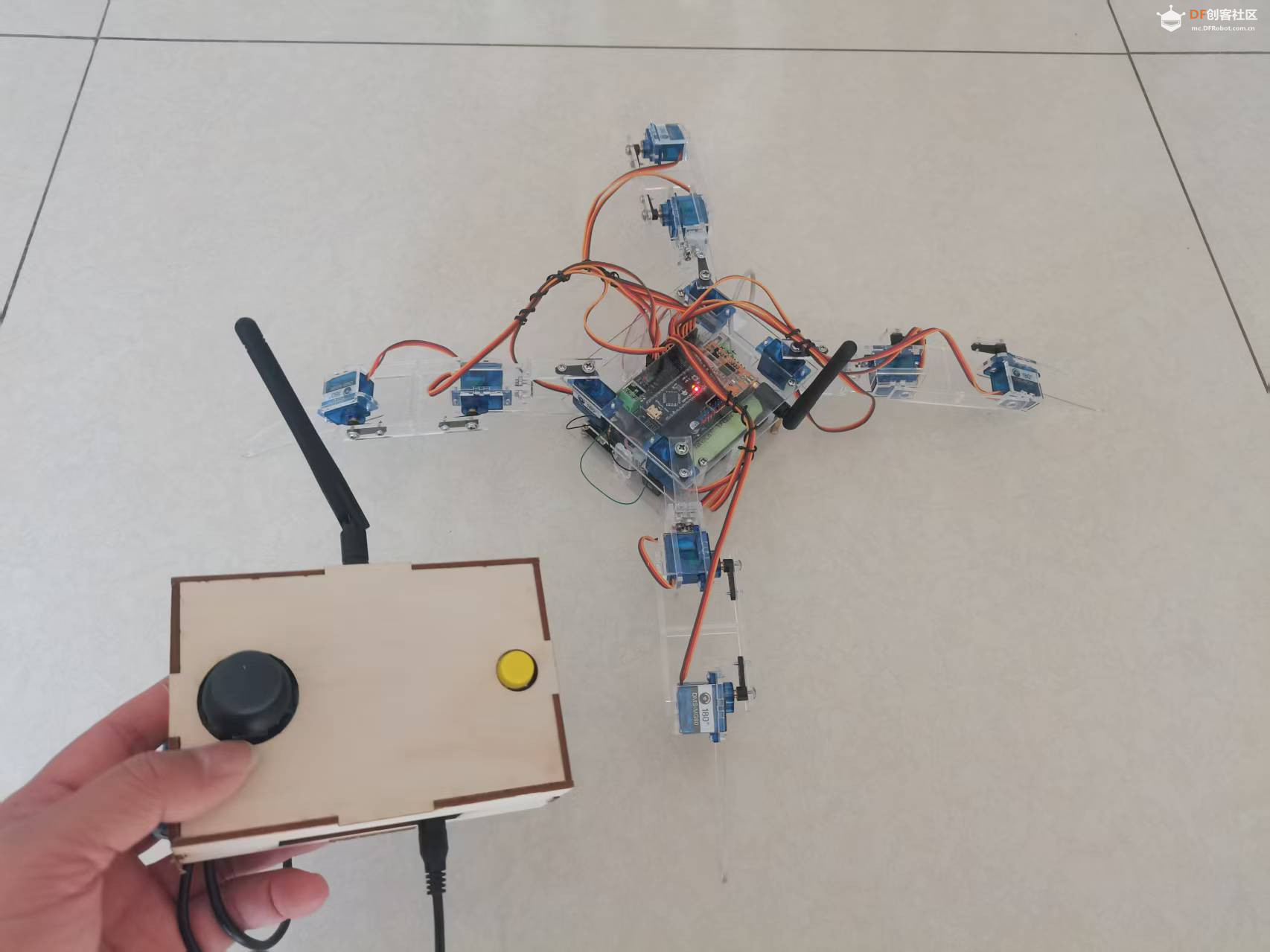 【二哈2编程机】 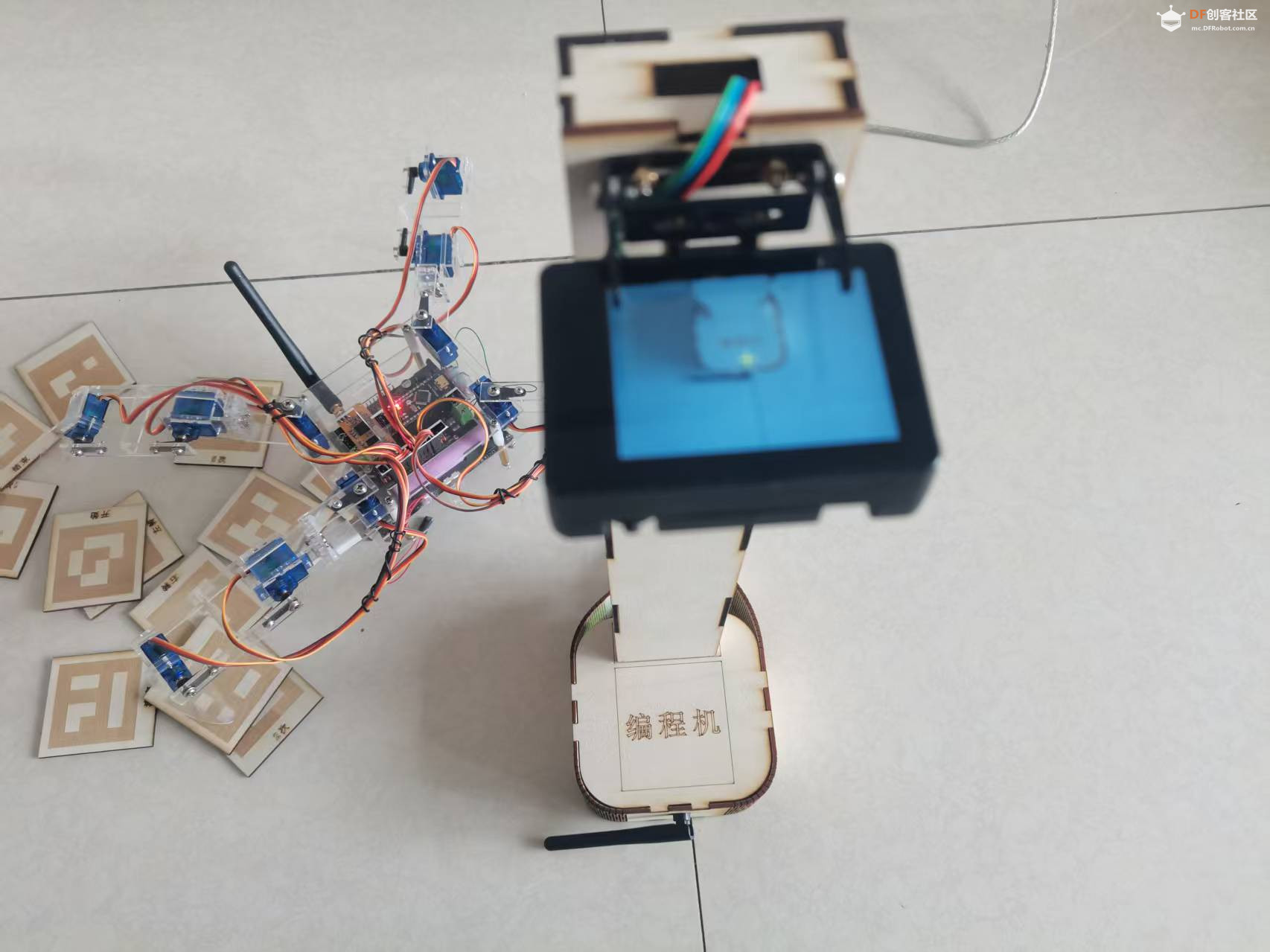 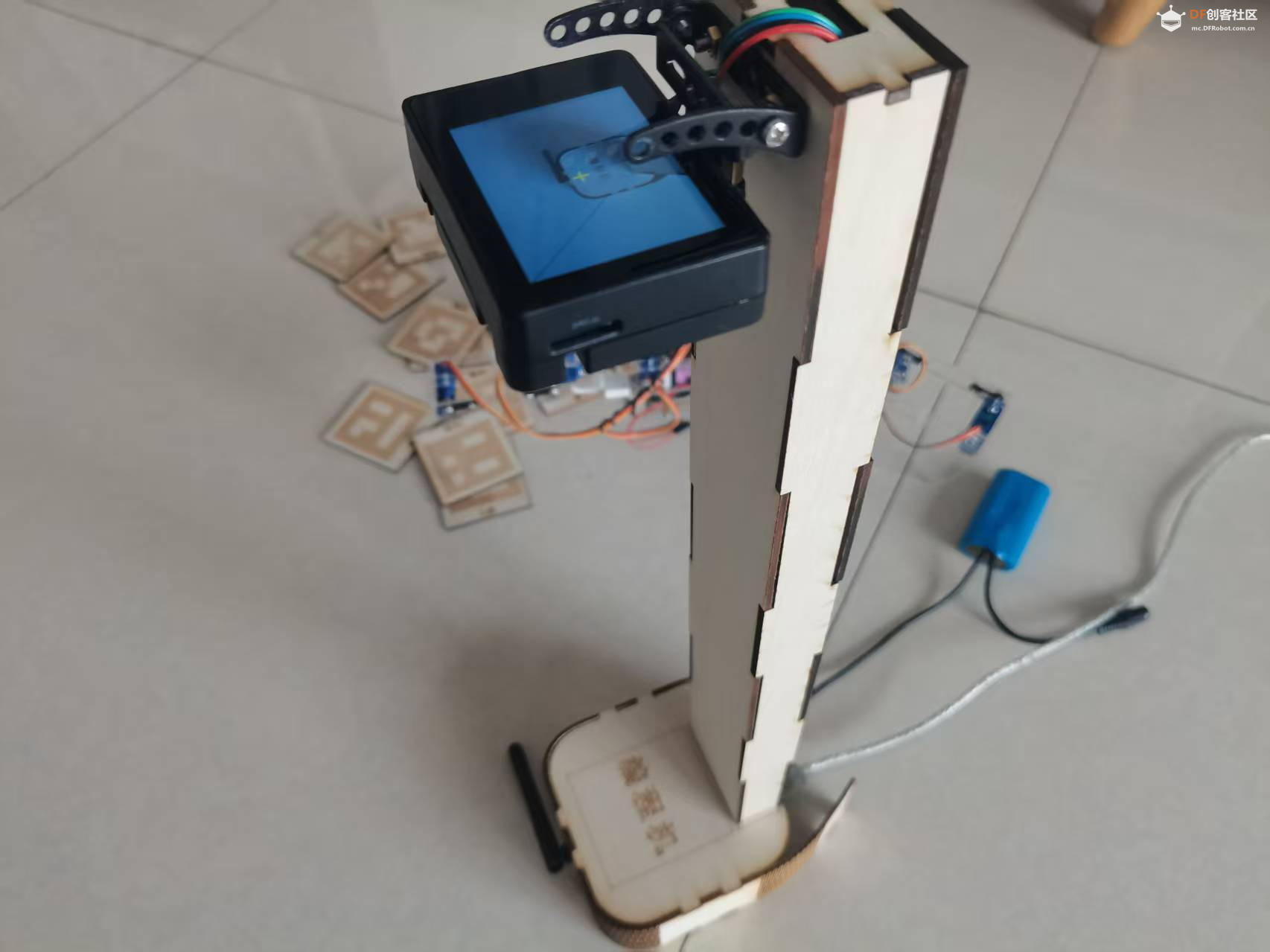 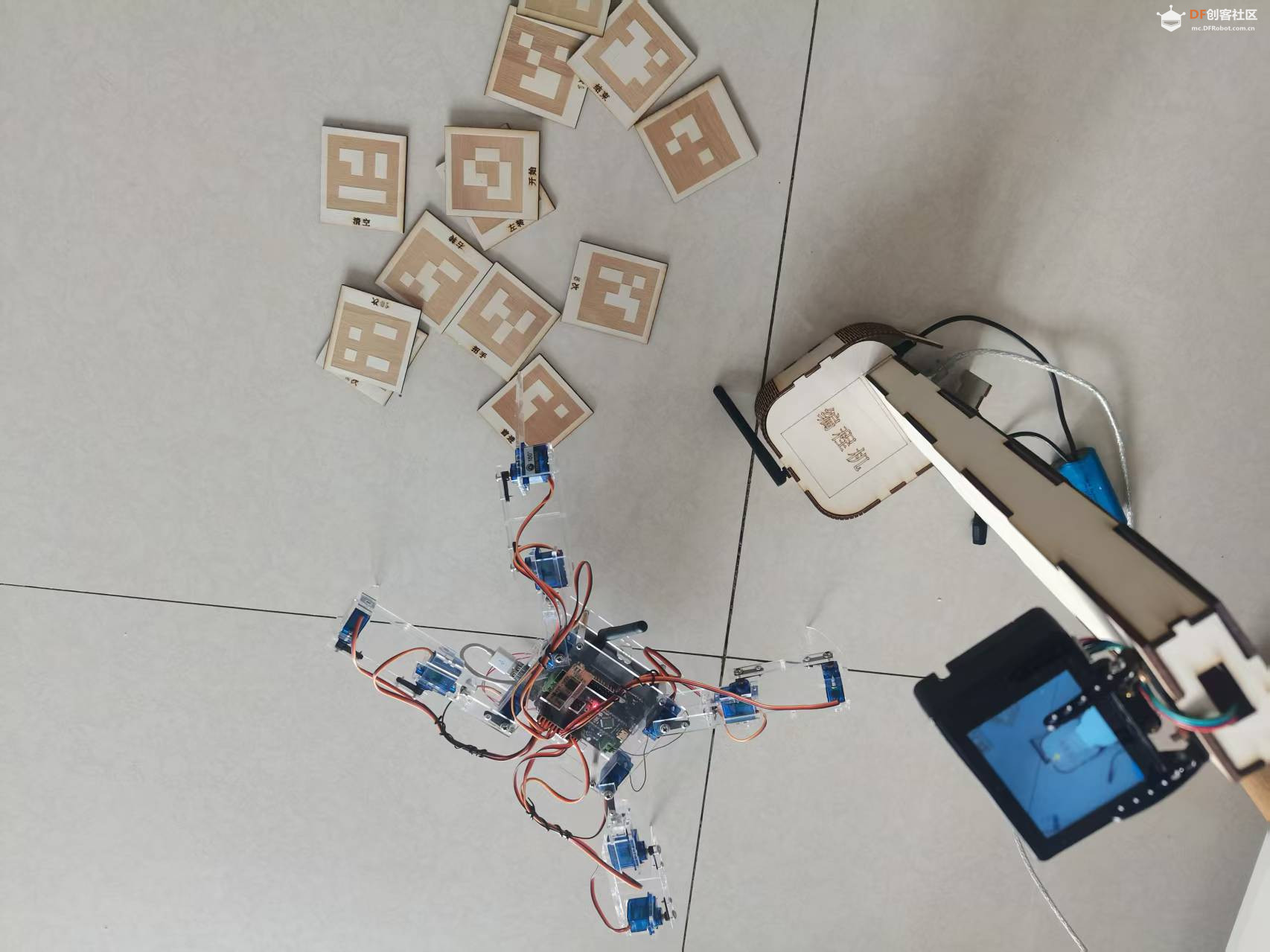 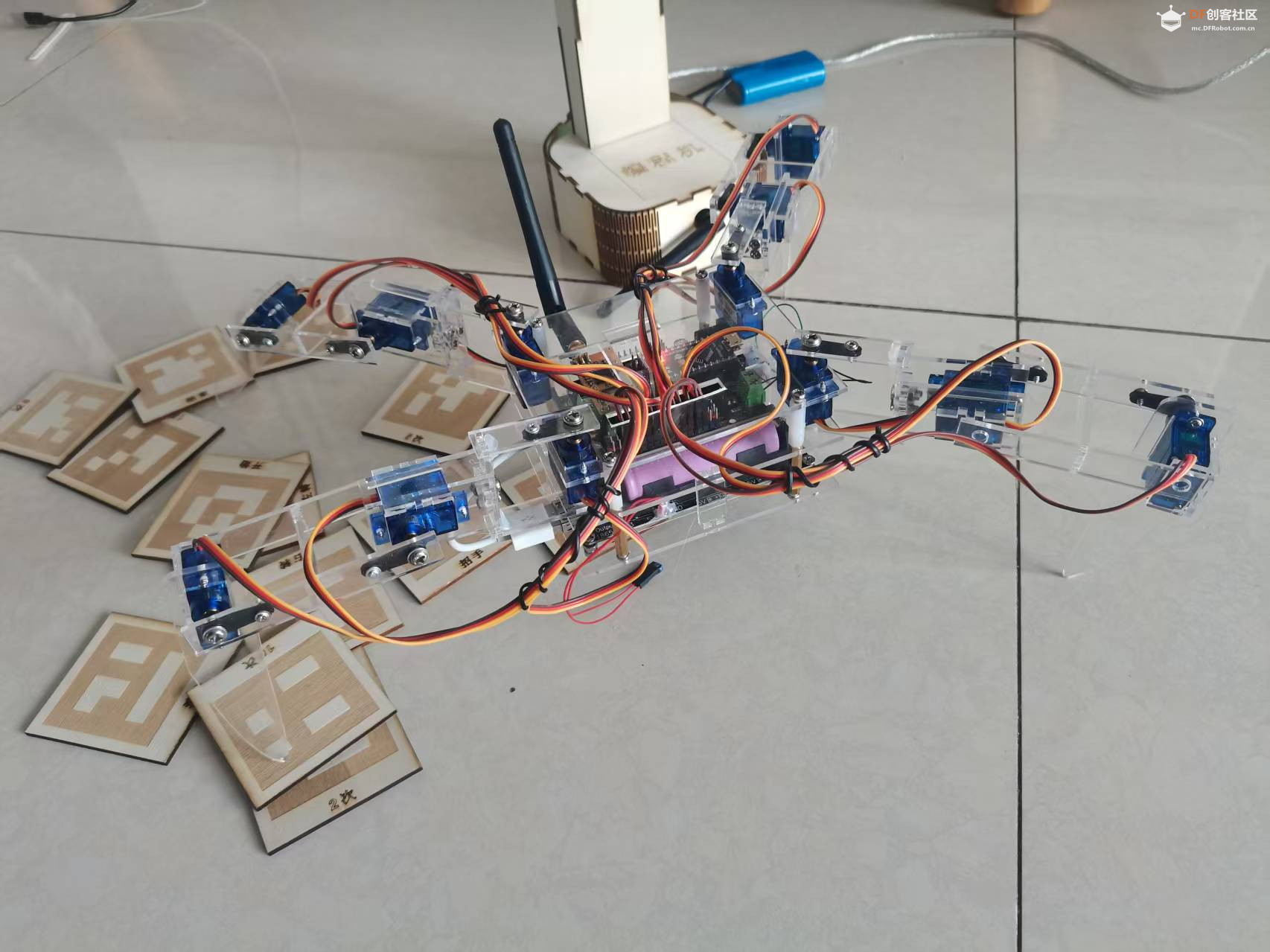 【技术实现】 复杂技术,简单呈现 【程序】 1.Arduino UNO主控——连接二哈2视觉传感器 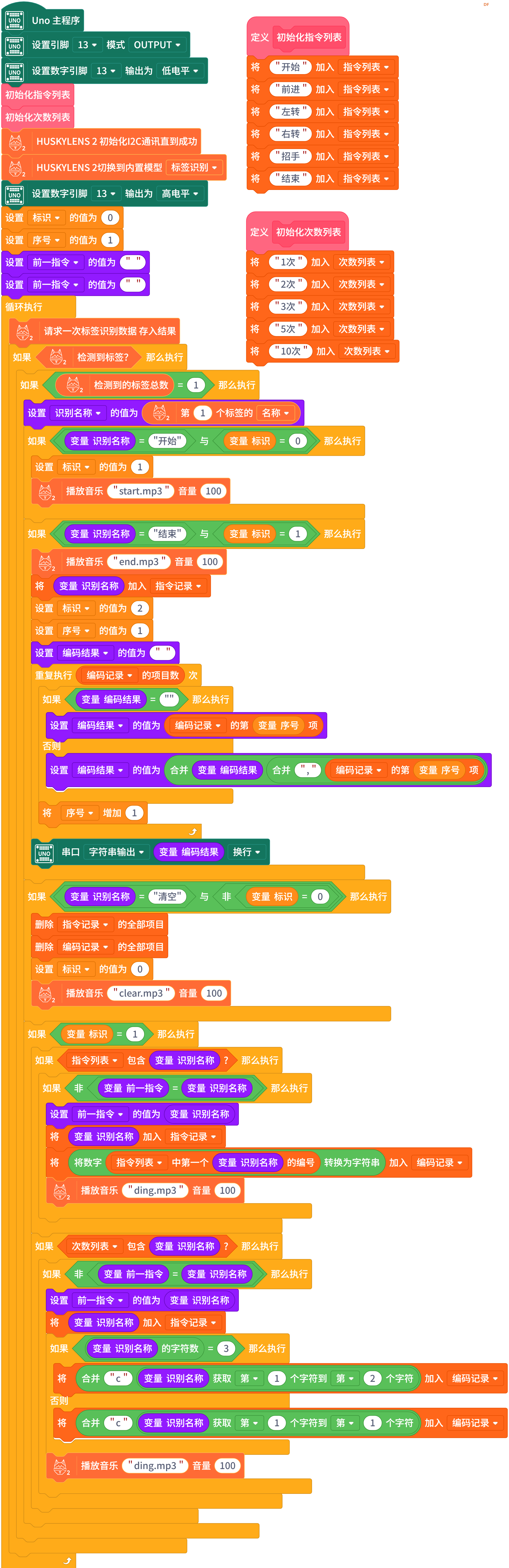 这段程序运行在连接二哈2视觉传感器的Arduino UNO上,它首先初始化传感器为标签识别模式并建立两个指令列表(动作指令和次数指令),然后持续检测摄像头前的标签:当识别到“开始”标签时系统进入录制状态,随后识别的动作标签(如前进、左转)会记录到指令队列并映射为数字编码,次数标签(如3次、5次)则转换为“cX”格式,每次成功识别都有声音反馈;当识别到“结束”标签时,程序将记录的指令序列组装成标准编码字符串(如“c5,2,c3,4”)并通过串口发送给APC220无线模块,完成整个“视觉编程-指令编码-无线传输”的流程,实现了无需屏幕的实体编程交互系统。 2.Arduino nano主控——四足机器人程序 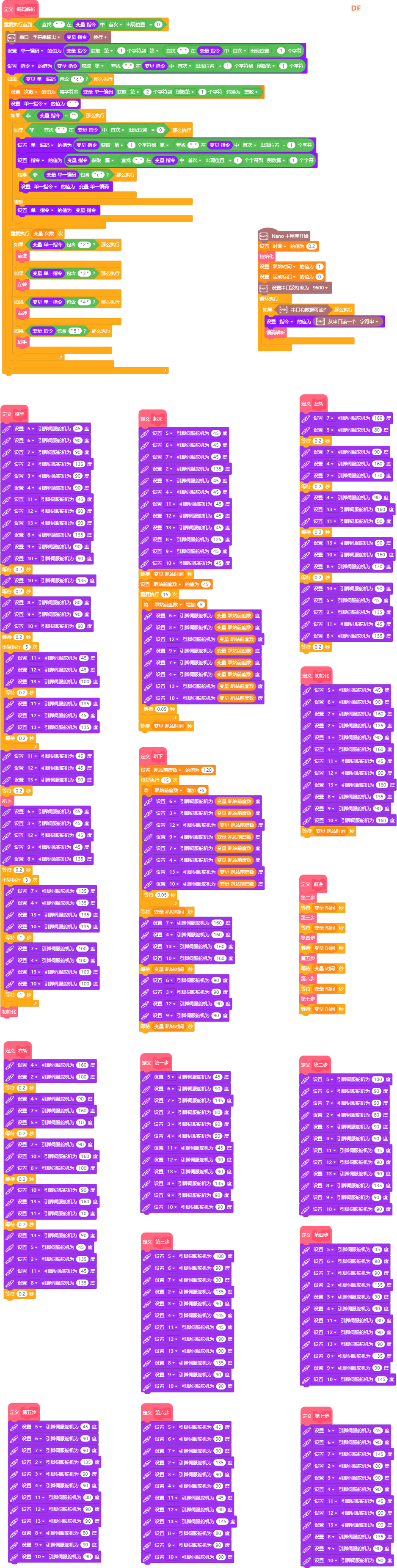 这段Arduino程序是四足蜘蛛机器人的核心控制系统,它通过无线串口接收编码指令,解析并执行相应的动作序列。程序首先初始化12个舵机到初始站立姿势,然后在主循环中持续监听串口指令;当收到以换行符结尾的编码字符串(如“c5,2,c3,4”)时,调用指令解析函数将字符串拆解为单个指令单元,识别出“cX”格式的循环次数和动作编码(2前进/3左转/4右转/5招手),并按指定次数循环执行相应动作;机器人通过精心设计的步态函数实现前进、转向等协调运动,每个动作都包含多个分解步骤以确保四足移动的稳定性,所有舵机角度和时间参数均可调节,使机器人动作既流畅又具备良好的可扩展性。 【演示视频】 【技术应该为成长服务】 “标签编程师”不是要培养小程序员,而是要保护孩子对世界的好奇,给他们一双发现规律的眼睛,一副敢于创造的大脑,和一段不被屏幕绑架的童年。 当孩子蹲在地上,小心翼翼地调整最后一个标签的位置,然后屏住呼吸看着蜘蛛机器人完美执行他设计的“舞蹈”时——我们知道,编程的种子,已经以最健康的方式种下了。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






