|
685| 5
|
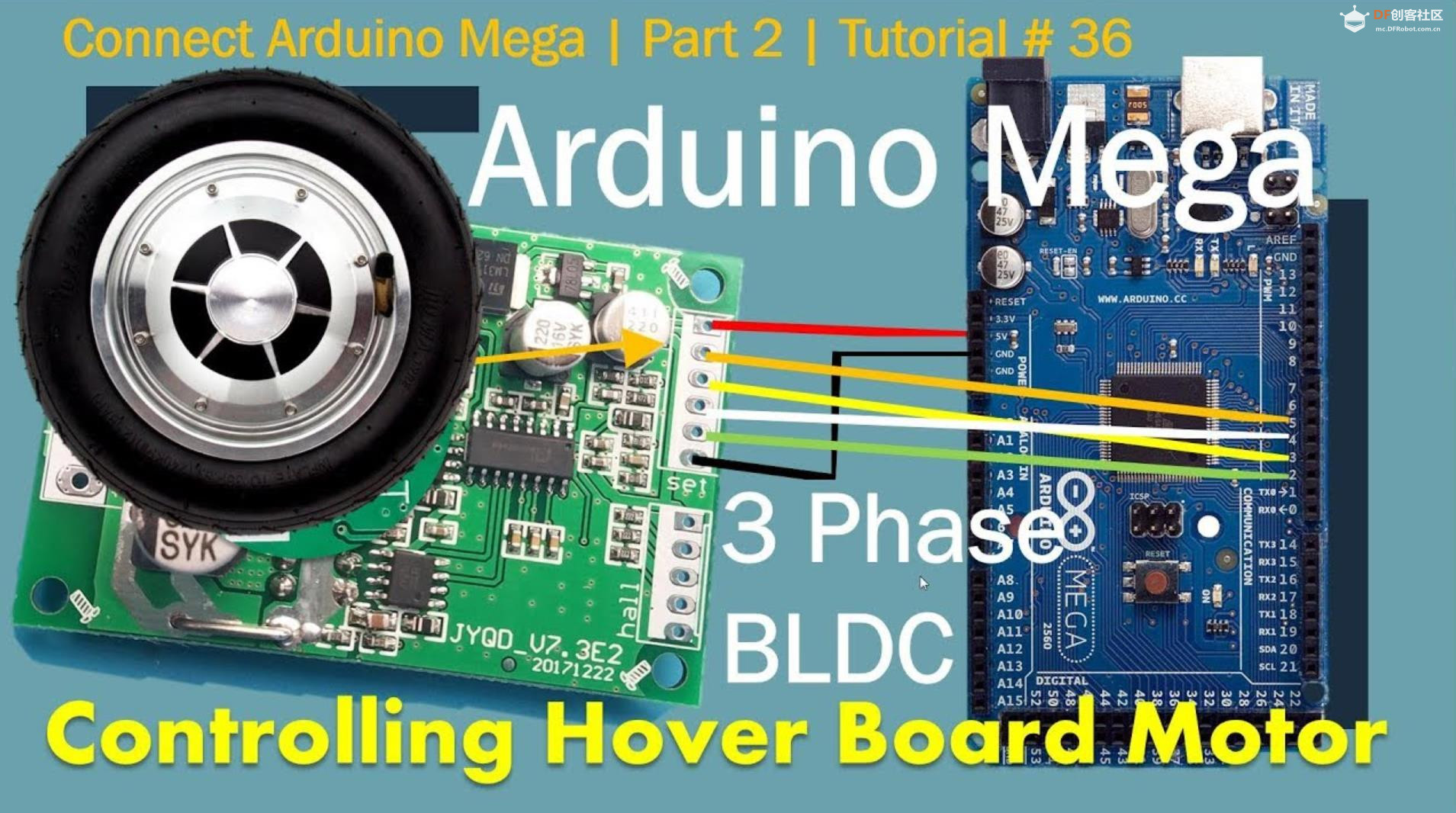
[项目] 【花雕学编程】无刷 BLDC 之驱动器模块L6234、DRV8302和TB6605 |
|
本帖最后由 驴友花雕 于 2026-2-23 09:58 编辑 在基于 Arduino 的无刷直流电机(BLDC)控制系统中,选择合适的驱动器模块是决定项目成败的关键。L6234、DRV8302 和 TB6605 代表了三种不同的技术路线和应用定位。 1、 L6234:高功率全集成驱动方案 L6234 是意法半导体(ST)推出的一款三相全桥驱动 IC,属于“全集成”功率驱动器,内部集成了 MOSFET,可直接驱动电机。 (1)主要特点: 高功率输出:这是一款高压、大电流驱动器,能够提供高达 3A 的峰值电流输出。其宽电压范围(通常 10V-52V)使其能够驱动功率较大的 BLDC 电机,如散热风扇、小型泵等。 简化电路设计:作为全集成方案,L6234 内部已包含驱动所需的 MOSFET 和保护电路。开发者无需外接复杂的功率管和驱动电路,极大地简化了 PCB 设计和外围元件数量,提高了系统紧凑性。 高效 PWM 调速:支持高达 100kHz 的 PWM 输入频率,允许通过调整占空比来精确控制电机转速,实现平滑的无级变速。 (2)应用场景: 计算机与工业散热:高性能计算机机箱风扇、工业设备散热风扇的调速控制。 小型泵与压缩机:需要大电流驱动和精确速度控制的小型流体泵。 Arduino 高功率扩展板:作为 Arduino 的电机驱动扩展板核心芯片,用于需要驱动较大功率负载的创客项目。 (3)需要注意的事项: 散热设计:由于驱动大电流,芯片在高负载下会产生显著热量。必须配备足够面积的散热片或使用金属基板 PCB,否则容易因过热触发内部热保护而停机。 电源去耦:大电流开关动作会对电源造成干扰。必须在电源输入端和芯片附近放置足够容量的电解电容和高频陶瓷电容,以稳定电压,防止电压跌落。  |
|
2、 DRV8302:高性能栅极驱动器(半集成) DRV8302 是德州仪器(TI)推出的一款三相栅极驱动器 IC,属于“半集成”方案。它本身不包含功率 MOSFET,而是作为控制器与功率管之间的“放大器”。 (1)主要特点: 宽电压与高驱动能力:工作电压范围极宽(8V-60V),适应性强。其栅极驱动拉/灌电流能力高达 1.7A/2.3A,能够快速开关外部的大功率 MOSFET,减少开关损耗,提高系统效率。 高度集成与保护:内部集成了降压转换器(Buck Converter),可为 MCU 或其他逻辑电路提供电源,减少了外部电源模块的需求。具备高级保护功能,如通过检测 MOSFET 导通电阻(Rds(on))实现的过流保护(VDS OCP)和自动死区时间插入,防止上下桥臂直通。 灵活的 PWM 控制模式:支持 6 个独立的 PWM 输入或 3 对互补 PWM 输入,为高级控制算法(如 FOC)提供了极大的灵活性。 (2)应用场景: 高性能电机控制器开发:适用于需要定制化、高效率、高功率密度的 BLDC 电机控制器开发,如电动工具、无人机电调。 FOC(磁场定向控制)系统:其快速的驱动能力和灵活的控制模式,使其成为实现复杂 FOC 算法的理想选择。 工业自动化设备:用于驱动需要宽电压调速和高可靠性的工业伺服系统或主轴电机。 (3)需要注意的事项: 外部 MOSFET 选型:开发者必须自行选择合适的 N 沟道 MOSFET。选型需综合考虑电压、电流、导通电阻(Rds(on))、栅极电荷(Qg)和封装散热能力,匹配 DRV8302 的驱动特性。 PCB 布局挑战:功率回路(Power Loop)的 PCB 布局至关重要。必须尽量缩短 MOSFET 与驱动器之间的走线,以减小寄生电感,防止开关振铃和电压尖峰损坏器件。  |
|
3、TB6605FTG:低成本正弦波驱动方案 TB6605FTG 是东芝推出的一款三相无刷电机驱动 IC,其最大特点是内置了正弦波控制逻辑,属于“控制器+驱动器”单芯片方案。 (1)主要特点: 内置正弦波控制:这是其核心优势。芯片内部集成了霍尔传感器信号处理和正弦波驱动逻辑,能够直接输出平滑的正弦波电流驱动电机,极大地降低了对主控 MCU 的性能要求,简化了软件开发难度。 极低的待机功耗:具备极低的待机电流,非常适合对功耗敏感的电池供电设备。 成本效益:作为单芯片解决方案,它将控制逻辑和驱动电路集成在一起,外围电路简单,整体方案成本较低。 (2)应用场景: 消费类电子产品:如无人机云台电机、便携式风扇、空气净化器风扇等,这些应用对噪音和成本敏感,且 MCU 资源有限。 Arduino 入门级 BLDC 教学:由于其控制简单,常被用于 Arduino 兼容的驱动模块,帮助初学者快速上手 BLDC 电机控制,理解基本原理。 家电设备:洗衣机、洗碗机的循环泵等需要静音运行的家电电机驱动。 (3)需要注意的事项: 驱动能力限制:该芯片的持续输出电流能力相对较低(约 0.02A-0.5A 级别),不适合驱动大功率负载。 控制灵活性较低:由于控制逻辑固化在芯片内部,开发者难以实现高级的定制化控制算法(如 FOC 或梯形波控制的优化),控制模式相对固定。  |
|
1、L6234 全集成驱动器控制(基于 PWM 直接驱动) L6234 正确特性:单片集成 6 个功率 MOSFET(3 个半桥),最大电压 48V,最大电流 5A。控制简单,只需提供 PWM 和方向信号。 2、DRV8302 驱动器控制(基于 SPI 配置) DRV8302 特点:集成 MOSFET 和电流检测,支持 SPI 配置参数,适合闭环 FOC 控制。 3、TB6605 驱动器控制(步进电机模式模拟 BLDC) TB6605 特点:通常用于步进电机,但可通过特定接线和代码模拟 BLDC 的六步换相。 要点解读 1、集成度与外围电路 L6234(全集成):内部集成了功率级(MOSFET)和逻辑控制。只需连接电源、电容和输入信号即可工作,无需外接 MOSFET,PCB 设计最简单。 DRV8302(预驱 + 集成 MOSFET):内部也集成了 MOSFET,但通常功率比 L6234 更大,且集成了电流检测放大器和SPI 接口,功能更丰富。 TB6605(步进电机专用):通常指步进电机驱动器模块,内部是 H 桥,用于 BLDC 控制时需特殊接线(如将两相并接或使用三块板子),非标准用法。 2、控制信号接口 L6234:纯硬件控制。每相需要 2 个数字/PWM 信号(IN1, IN2)。代码中需手动管理死区时间(Dead Time),防止上下管直通。 DRV8302:硬件 + 软件配置。除了 PWM 输入,还支持 SPI 通信,可软件配置死区时间、过流保护阈值等,更智能。 TB6605:通常只有脉冲(PUL)和方向(DIR)接口,用于 BLDC 时需将 PWM 信号模拟为三相,控制粒度较粗。 3、电流检测与保护 L6234:通常只有简单的过流关断(通过检测引脚),无法提供精确的电流反馈给 MCU 用于 FOC 算法。 DRV8302:内置电流检测放大器,可输出模拟电压信号或通过 SPI 读取,非常适合磁场定向控制(FOC)。 TB6605:通常只有简单的过流保护,无电流反馈。 4、适用功率范围 L6234:典型工作电压 8-48V,电流 5A(峰值),适合中小功率应用(如小型机器人、泵、风扇)。 DRV8302:电压可达 60V,电流 60A(峰值),适合大功率应用(如电动滑板、大型机器人)。 TB6605:通常用于 24V-40V,电流 3-5A 的步进电机,用于 BLDC 时功率受限。 5、代码复杂度与库支持 L6234:无专用库。需自行编写六步换相或 FOC 底层驱动,代码量较大(如案例一所示)。 DRV8302:有较好的开源库支持(如 SimpleFOC 库直接支持),可快速实现高性能控制。 TB6605:完全不推荐用于 BLDC 控制。如果必须使用,代码需大量“Hack”来模拟三相输出,性能差且不稳定。 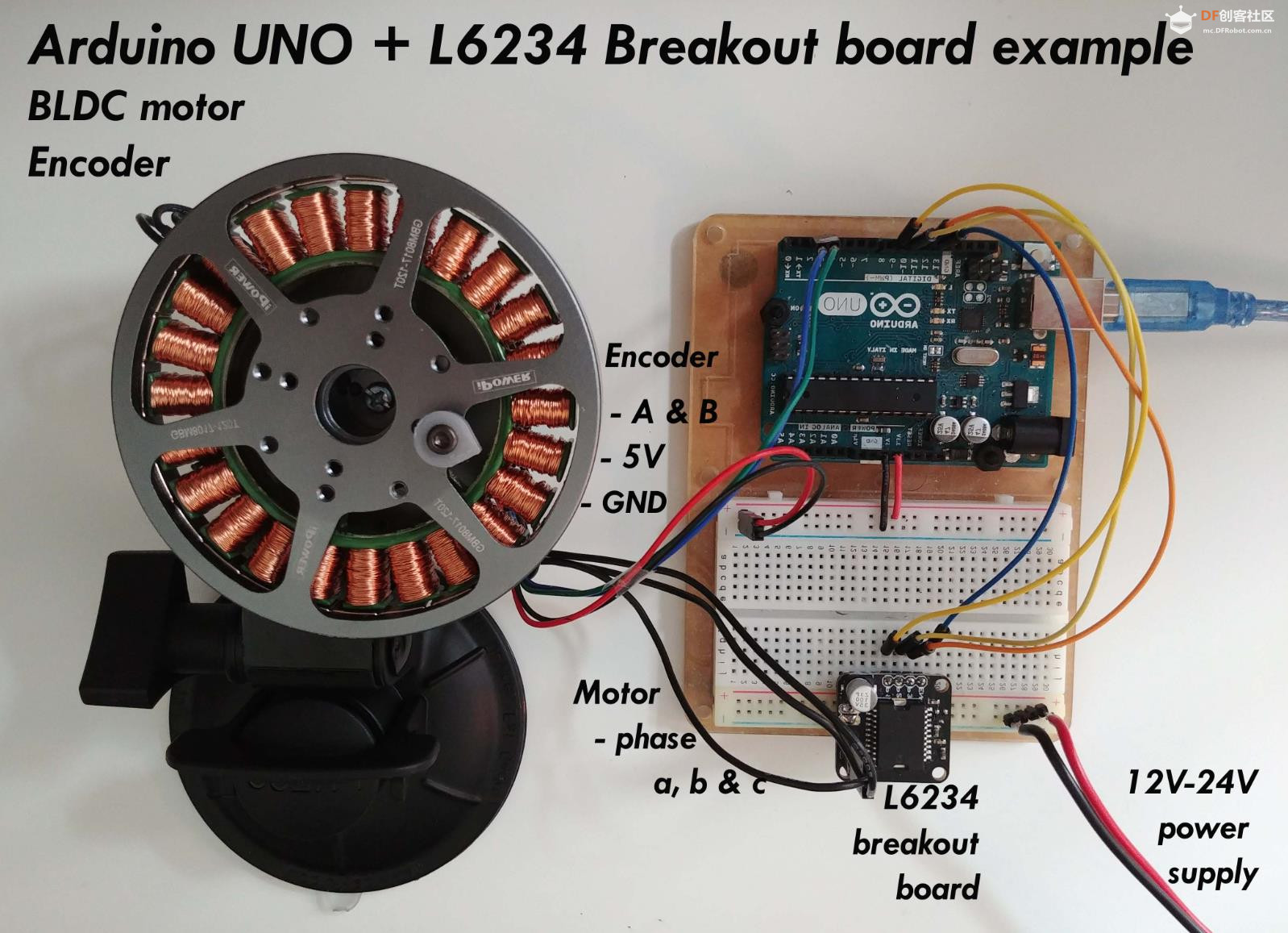 |
|
4、L6234驱动BLDC电机(低功率应用) 功能 使用L6234驱动BLDC电机,通过Arduino生成PWM信号控制转速,并检测过流故障。 5、DRV8302驱动BLDC电机(高功率应用) 功能 使用DRV8302驱动高功率BLDC电机,集成电流检测和SPI通信读取故障状态。 6、TB6605驱动BLDC电机(中等功率应用) 功能 使用TB6605驱动BLDC电机,通过外部PWM调速,并检测锁转保护。 要点解读 1、驱动器选型与功率匹配 L6234:适用于小功率电机(<1A),集成度高,适合低成本场景。 DRV8302:支持高功率(>10A),具备电流检测和SPI通信,适合复杂控制(如FOC)。 TB6605:中等功率(2-3A),简单易用,但功能较少。 2、PWM控制与换相逻辑 L6234/TB6605:需通过Arduino生成三相PWM信号(简化案例中仅演示单相切换)。 DRV8302:通常与FOC算法结合,需配合编码器或霍尔传感器实现精确换相。 3、故障检测与保护 过流/过热:L6234和DRV8302通过专用引脚(如FAULT)检测,TB6605通过LOCK引脚检测锁转。 SPI通信:DRV8302支持通过SPI读取详细故障状态(如电流值)。 4、硬件连接差异 L6234:需外接自举电容,PWM引脚直接控制三相。 DRV8302:需要配置SPI和电流检测电阻,硬件复杂度最高。 TB6605:仅需PWM、方向和使能信号,接线最简单。 5、代码扩展性 闭环控制:可加入PID算法实现速度闭环(需反馈信号如编码器)。 通信接口:DRV8302的SPI可扩展为多驱动器协同控制。 能效优化:通过PWM调频(如analogWriteFrequency)降低高频损耗。 6、应用场景建议 L6234:微型泵、风扇、无人机小桨叶。 DRV8302:电动滑板车、机器人关节、高扭矩伺服系统。 TB6605:智能窗帘、3D打印机挤出机、中等负载传动。 说明:实际使用时需根据驱动器数据手册调整PWM频率(如DRV8302通常需≥20kHz)和死区时间,避免直通短路。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶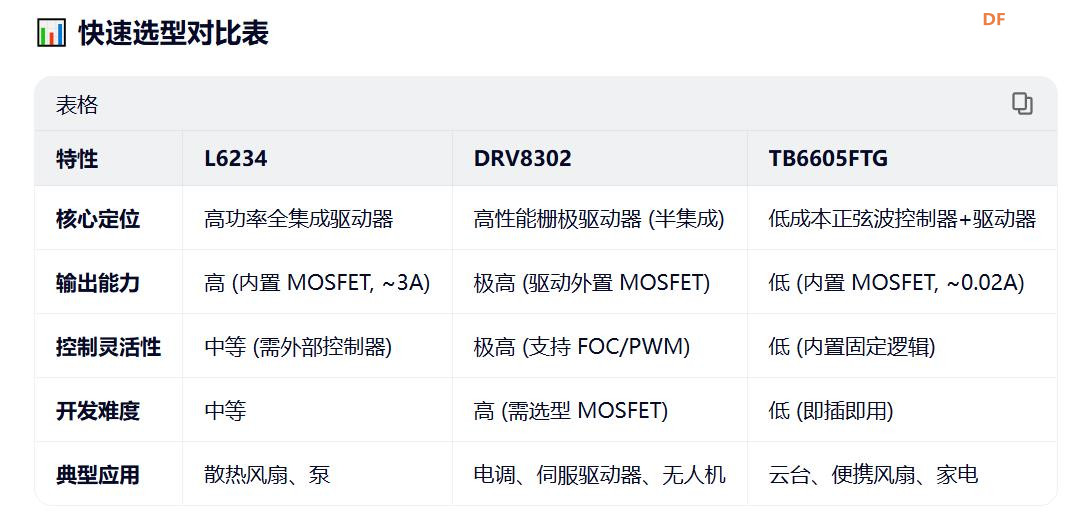

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






