|
3754| 7
|
[K10项目分享] OpenClaw结合行空板K10:用自然语言实现AI硬件编程 |

|
本帖最后由 loria 于 2026-3-26 11:21 编辑 1. 项目介绍 近期,开源 AI 智能体框架 OpenClaw 在开发者社区获得广泛关注。它能够通过自然语言指令直接操作电脑系统,自动完成文件整理、邮件管理等任务,让 AI 从单纯的对话工具升级为可执行任务的智能助手。既然 OpenClaw 可以操作电脑系统,那么它是否也能进一步控制硬件设备,实现自然语言硬件编程呢? 在本项目中,我将介绍如何将 OpenClaw 部署在 LattePanda 上,并结合 UNIHIKER K10。用户只需用自然语言描述想要实现的功能,OpenClaw 就能调用大语言模型(LLM)自动完成程序编写、调试和上传,最终由 UNIHIKER K10 直接运行程序。整个流程仅需 1–3 分钟,无需手动编写代码,让硬件编程真正变成一种自然语言交互体验。  2. 演示视频 以下是效果视频。 3. 硬件准备 为确保安全,本项目选择在 LattePanda 上运行 OpenClaw。LattePanda 作为单板电脑,可以独立执行 OpenClaw,兼顾安全性与计算能力。 OpenClaw 支持 Windows、macOS、Linux 等操作系统,你也可以在任何支持 OpenClaw 的设备上部署。具体安装方法请参考官方文档。 提示:最好选择Coding版本的API 安装成功后,你可以使用以下官方Web UI界面与你的‘龙虾’对话,也可以安装到飞书等聊天工具中与它交流。  5. AI硬件编程实现路径 下面展示 LattePanda + OpenClaw + UNIHIKER K10 实现 AI 硬件编程的流程。  用户用自然语言输入自己的需求,例如:“我希望 行空板K10 检测到人脸时亮起红灯”。OpenClaw 的 AI Agent 会先理解这个指令,并调用大语言模型生成相应程序代码。大语言模型会参考 UNIHIKER K10 的编程文档,自动完成代码编写和调试,然后将程序上传到 行空板K10 。最终,设备会根据用户的描述立即执行相应功能。 整个过程形成了一个闭环:“用户自然语言 → AI 自动编程 → 硬件响应”,既简化了硬件编程流程,又让用户可以直观地看到自己的指令如何变为现实。无需手动写代码,就能轻松体验 AI 驱动的自然语言硬件控制。 6. 行空板K10AI硬件编程开发教程 行空板 K10 搭载 ESP32-S3 芯片,既可使用 Arduino C语言进行硬件编程,也可通过 MicroPython 语言快速硬件控制。接下来,我将介绍 Arduino 和 MicroPython 两种不同的 AI 硬件编程教程,你可以根据自己的编程习惯和项目需求选择适合的版本。 6.1 Arduino 版本教程 6.1.1 部署Arduino编程环境 为了实现AI Agent自行Arduino C语言编程控制行空板K10,需要先部署Arduino编程环境。Arduino CLI 是 Arduino 官方提供的命令行工具。通过安装 Arduino CLI,并配置行空板 K10 的 BSP(板卡支持包),OpenClaw 就可以在生成代码后自动完成编译和烧录,无需人工干预,从而实现完整的自动化硬件编程流程。。 可以提供Arduino cli官方安装文档链接,让OpenClaw自动完成安装。 在聊天框中,输入以下指令:根据提供的链接,帮我安装 arduino cli,链接是:https://docs.arduino.cc/arduino-cli/installation/ 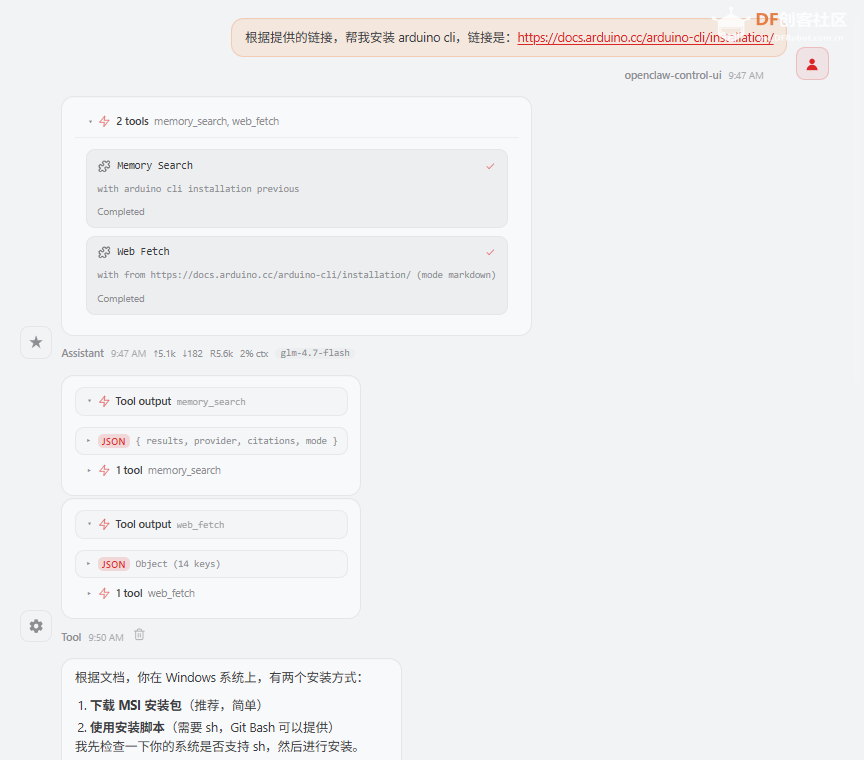 聊天框中,输入以下指令`Arduino CLI是否安装成功了`来检验OpenClaw是否完成安装任务。 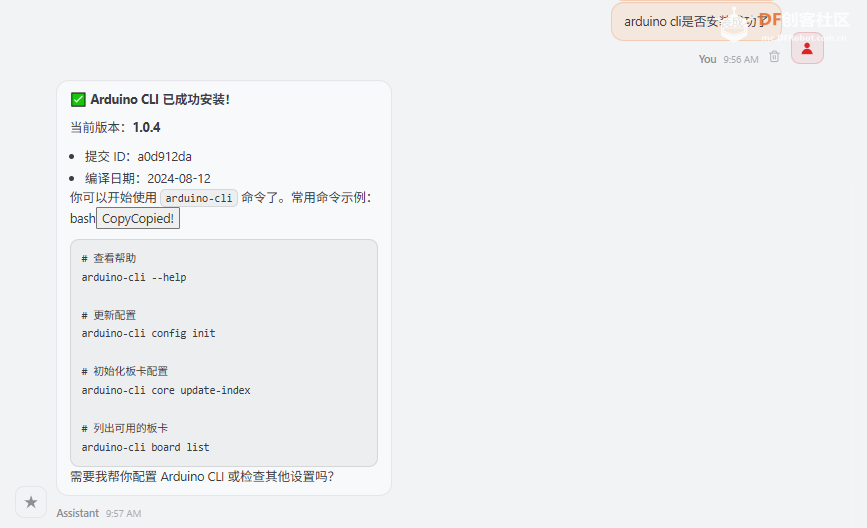 在完成 Arduino CLI 安装后,下一步需要让 OpenClaw 安装行空板 K10 的 BSP(板卡支持包),这里指定安装行空板K10的bsp版本为0.0.1。 聊天框中,输入以下指令: 根据提供的链接,帮我安装行空板 k10 的 arduino-cli bsp,安装的版本必须是0.0.1不能是其他版本,链接是:https://www.unihiker.com.cn/wiki/k10/ArduinoIDE_prepare 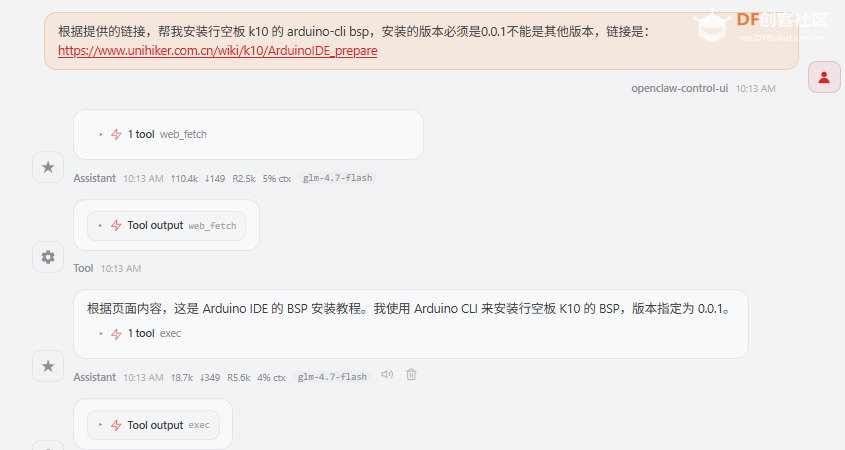 同样可以检验行空板K10的bsp是否安装成功。  6.1.2 AI Agent使用Arduino编程指导 在完成 Arduino 编程环境部署和 K10 BSP 安装后,就可以指导 AI Agent 使用 Arduino 为行空板 K10 自动生成程序了。为了让 AI Agent 正确理解如何使用Arduino 程序控制行空板K10 硬件,我整理了两份Arduino编程参考文档。 一份是行空板 K10 官方 Wiki 中的 Arduino 示例程序 MD 文档,另一份是 Arduino IDE 开发库说明文档。有了这两份文档,AI Agent 可以根据用户的自然语言指令,自动生成符合 K10 硬件规范的 Arduino 程序。 OpenClaw有一个工作区,存储它所有的工作信息与文件,可以将上述两份文档手动添加到它的工作区,保证它每次都能准确找到。 你可以输入指令询问OpenClaw工作区的具体路径,输入`告诉我本电脑openclaw工作区的路径` 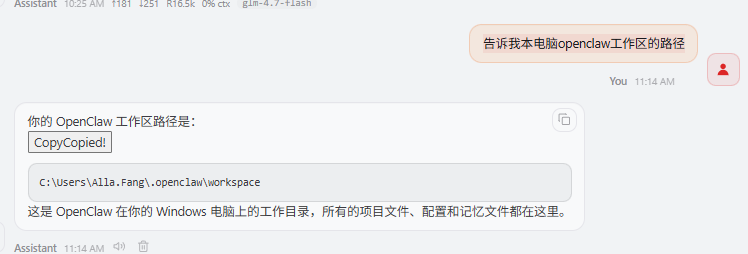 把这两份文档手动复制添加到OpenClaw的工作区(文档见文末附件)。 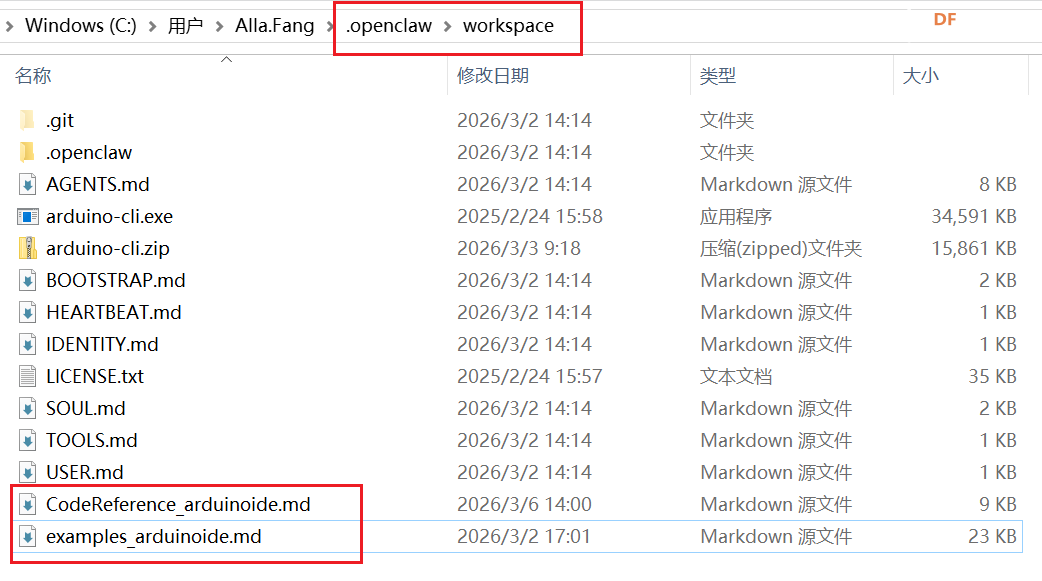 使用USB数据线连接行空板K10与电脑,打开设备管理器查找行空板K10对应的端口号。  接下来,就可以指导 AI Agent 自行编程控制行空板 K10。在指令中,需要提供三类关键信息:板卡端口号、编程语言以及程序功能。AI Agent 会根据这些信息,并参考提供的官方文档(examples_arduinoide.md 和 CodeReference_arduinoide.md),生成完整的 Arduino 程序并上传到 K10。 例如‘参考工作区的examples_arduinoide.md和CodeReference_arduinoide.md,用arduino写一个程序显示环境光线值,温湿度每秒刷新一次并运行在com17的行空板K10’ 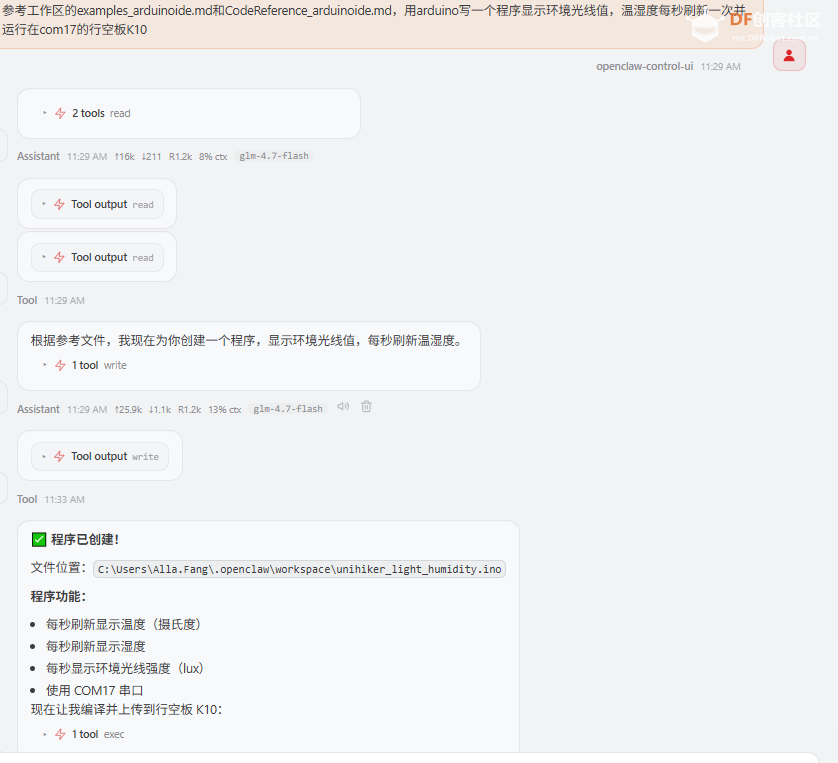 等待3-4分钟,观察OpenClaw返回的程序运行结果和行空板K10响应结果。以下是我的运行结果。 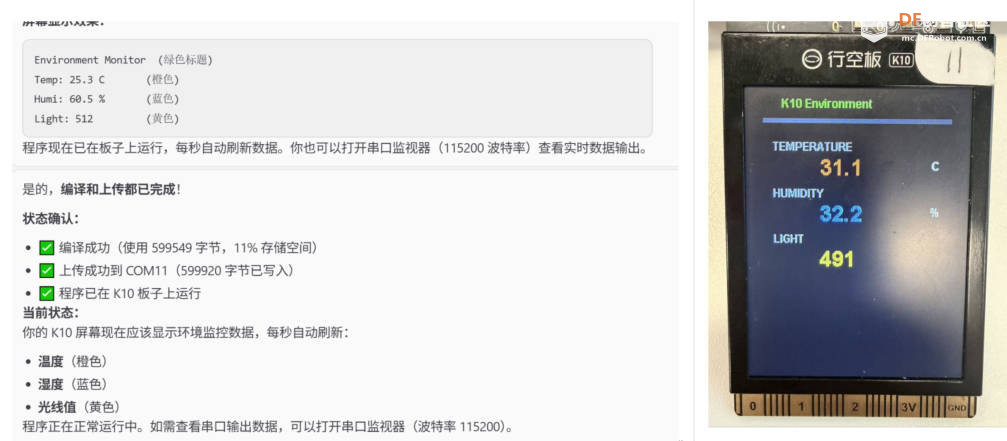 6.1.3 添加Arduino编程Skill 我们可以将上述使用Arduino Cli写程序并编译上传的过程写成一个skill安装在自己电脑的OpenClaw中,这样在让OpenClaw通过自然语言控制行空板K10时就不用每一次告诉它参考文档的位置了。 输入指令给OpenClaw:将上述使用arduino cli编程烧录,参考examples_arduinoide.md和CodeReference_arduinoide.md写程序并烧录到行空板K10 的流程整理成一个K10-arduino-skill这样用户告诉你编程语言,程序功能和行空板K10端口号,你要自行完成程序编写调试和烧录,安装此skill。  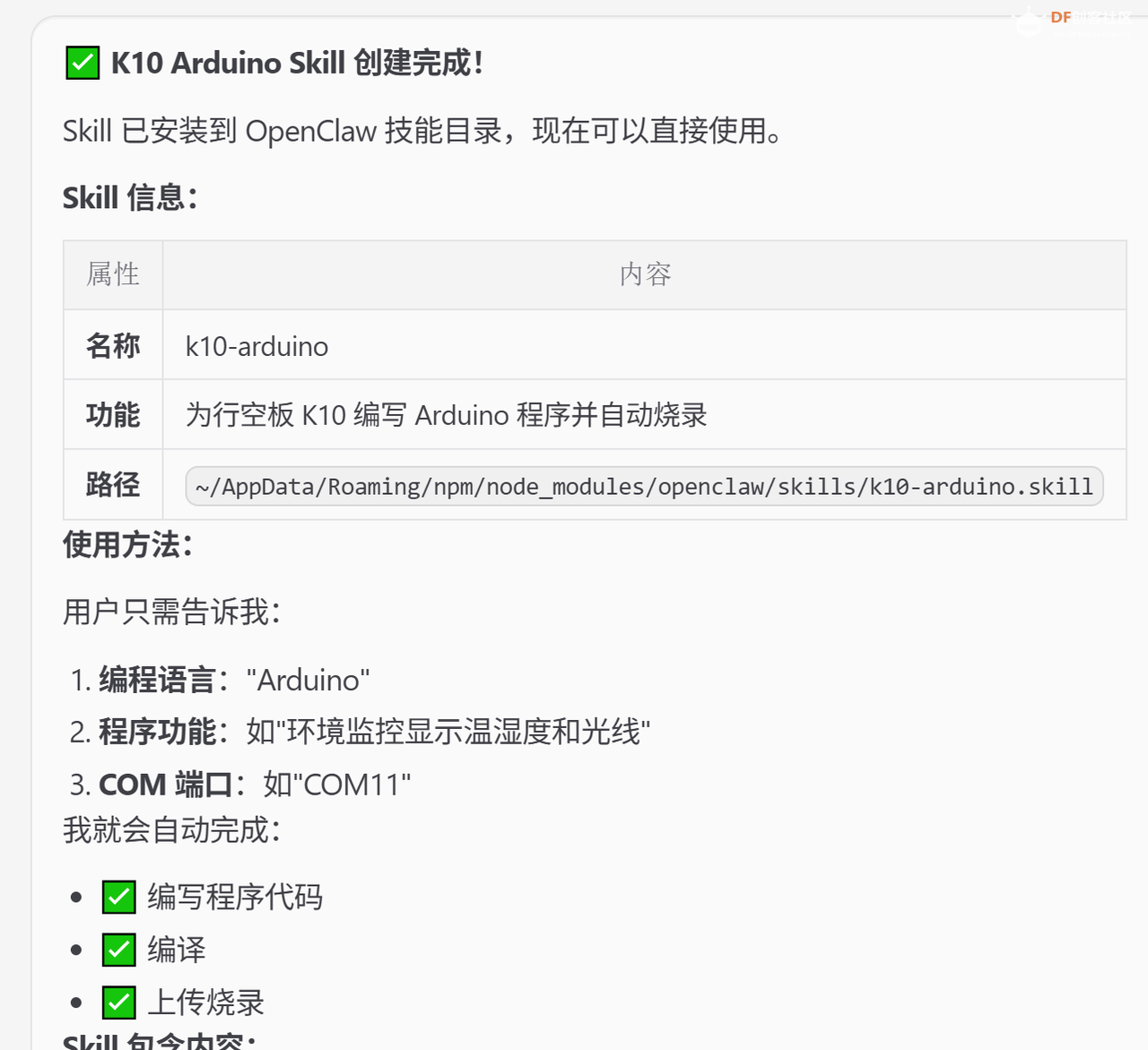 这样下次再使用时可以直接输入指令:用Arduino写一个....的程序上传至端口为...的行空板K10。  6.2 Micropython版本教程 6.2.1 部署MicroPython编程环境 行空板 K10 支持 MicroPython 编程,相比 Arduino 方式,MicroPython 可以减少编译环节,从而缩短开发时间。首先,需要根据官方文档将指定的 MicroPython 固件烧录到行空板 K10 上,教程链接如下:行空板 K10 MicroPython 固件烧录教程。 完成固件烧录后,需要在电脑上安装 Python 环境,并设置为全局环境变量,以便在本地通过命令行或者 IDE(如 Thonny 或 uPyCraft)与 K10 进行交互和程序上传。Python 官方安装指南可参考:https://www.python.org/。 检查Python是否成功设置为全局环境变量,可以打开Powershell,输入:python --version 如果输出Python版本号,说明已经成功设置为全局变量,这样后面AI Agent能直接在命令行用python进行编程并上传程序。  还需要安装 mpremote 工具,用于与 MicroPython 设备进行通信。 在OpenClaw中输入指令:`为我安装mpremote 工具,用于与 MicroPython 设备进行通信` 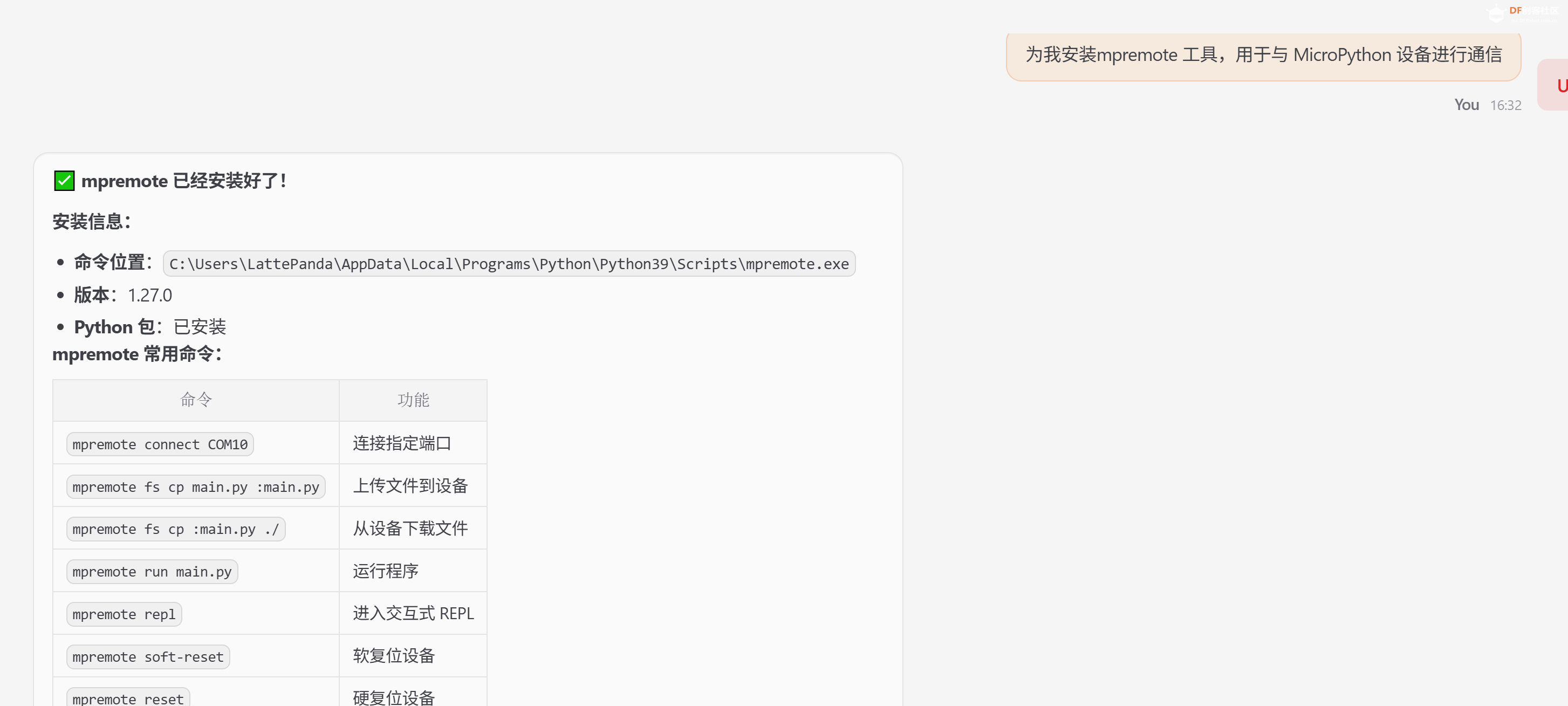 6.2.2 AI Agent 使用MicroPython编程指导 在完成 MicroPython 编程环境部署后,就可以指导 AI Agent 使用 MicroPython 为行空板 K10 自动生成程序。为了确保生成的程序正确可运行,需要为 AI Agent 提供参考文档 micropython-example.md(见文件附录),其中包含了 K10 的基础示例和常用功能调用方式。 在实际使用中,你只需向 AI Agent 提供明确的任务描述,例如功能需求和设备端口信息,并说明参考该文档进行编程。AI Agent 会基于 micropython-example.md 中的示例代码,自动生成符合 K10 规范的 MicroPython 程序,并通过命令行工具上传到设备运行。 将micropython-example.md文档手动复制添加到OpenClaw的工作区。 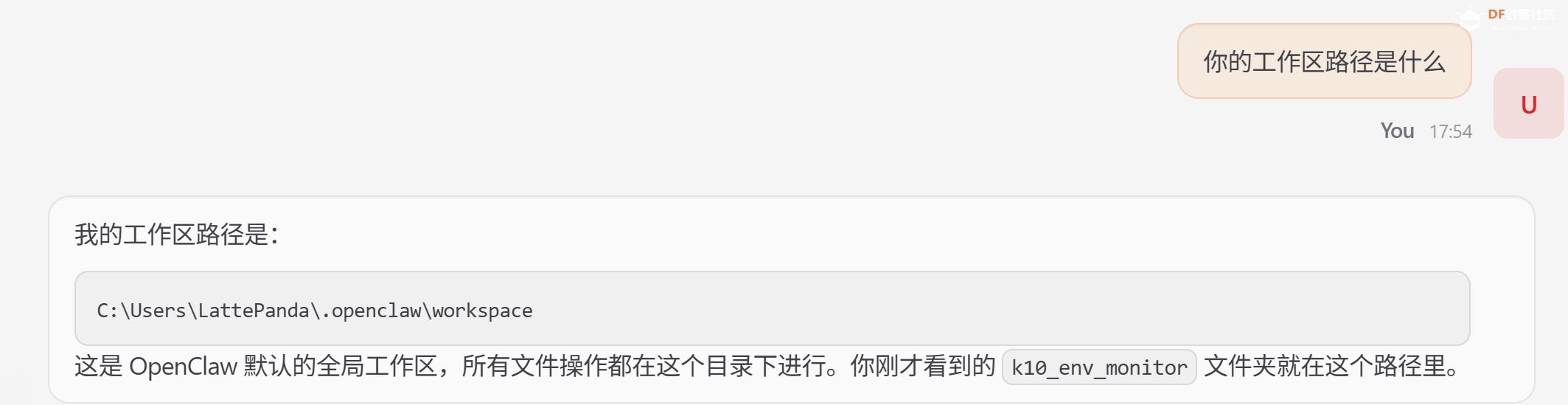 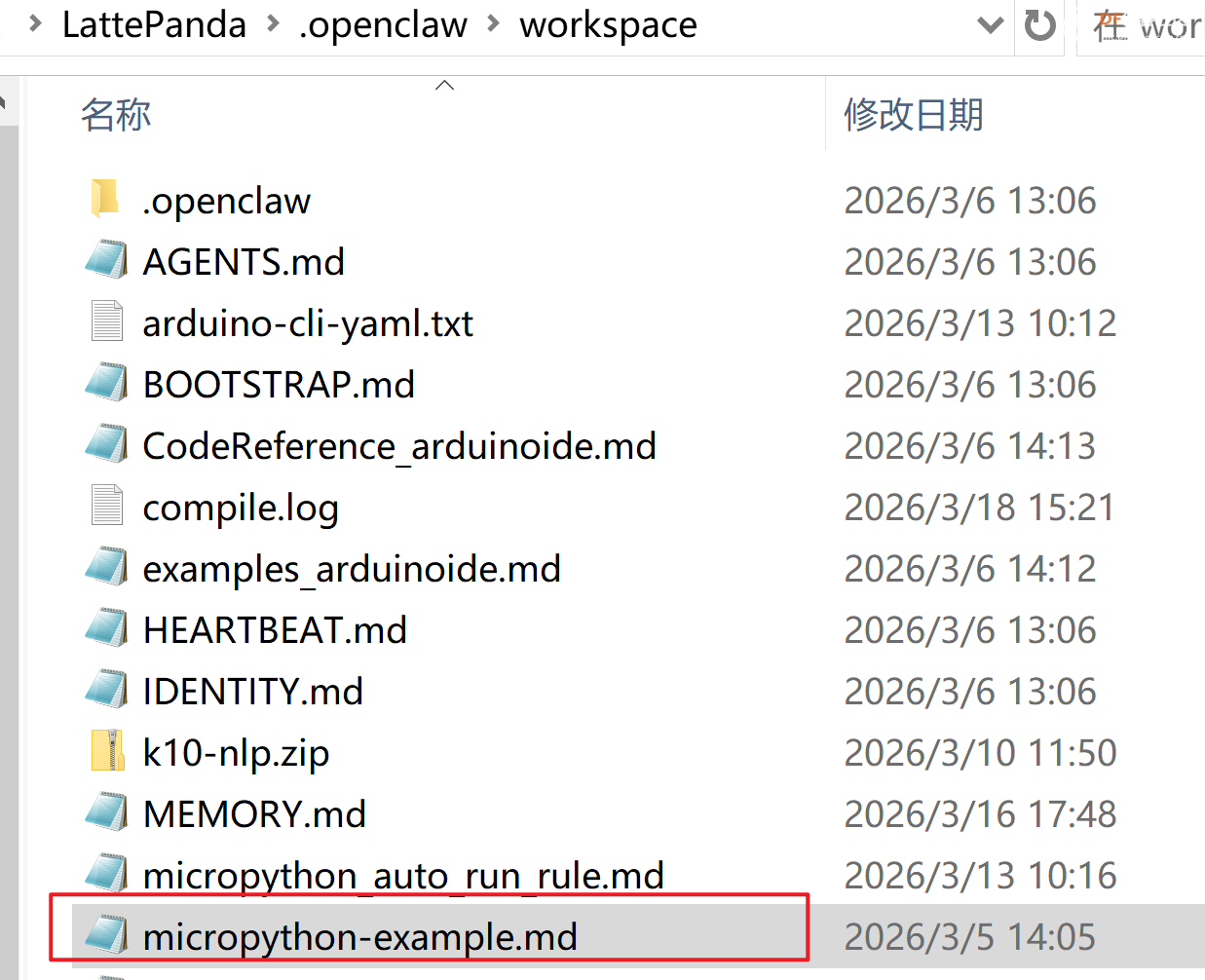 使用USB数据线将MicroPython版本的行空板K10插在电脑上,打开设备管理器查找行空板K10的对应端口,例如下图,端口为com14。  输入编程指令,例如:参考工作区的micropython-example.md示例文档,用micropython写一个检测到人脸K10板载RGB灯亮为红色的程序,用mpremote上传并运行在com14的行空板K10。 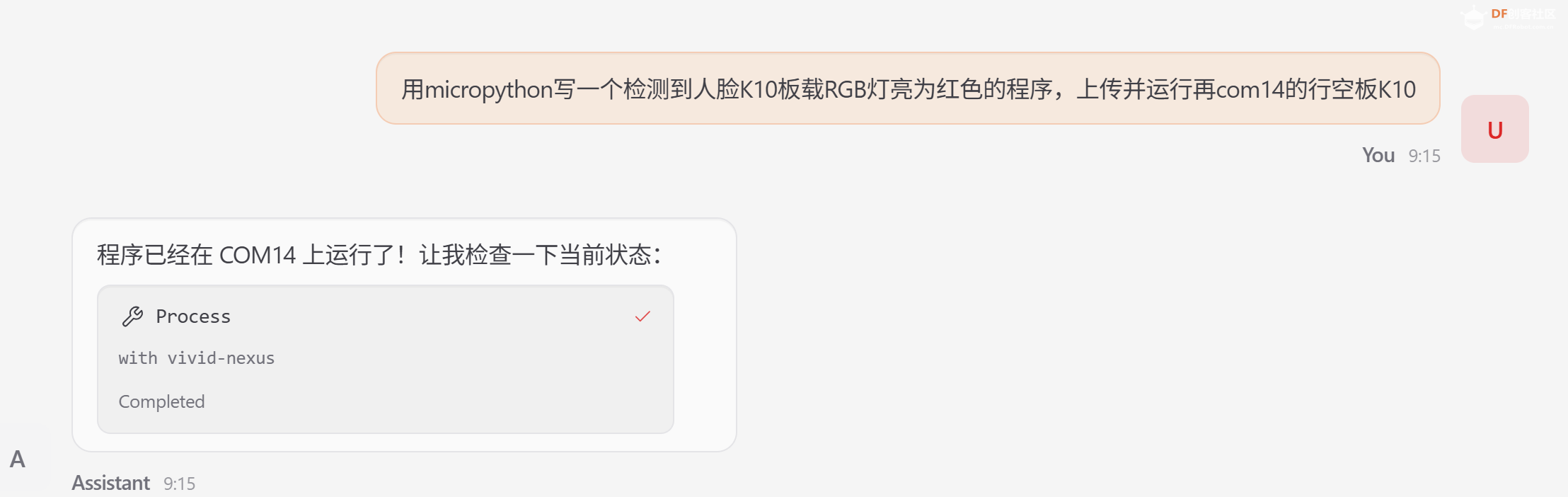 相比Arduino的编程方式,MicroPython的编程方式响应速度会更快,约等一分钟可以观察行空板K10屏幕显示板子的摄像头画面当检测到人脸时板载RGB灯亮为红色。 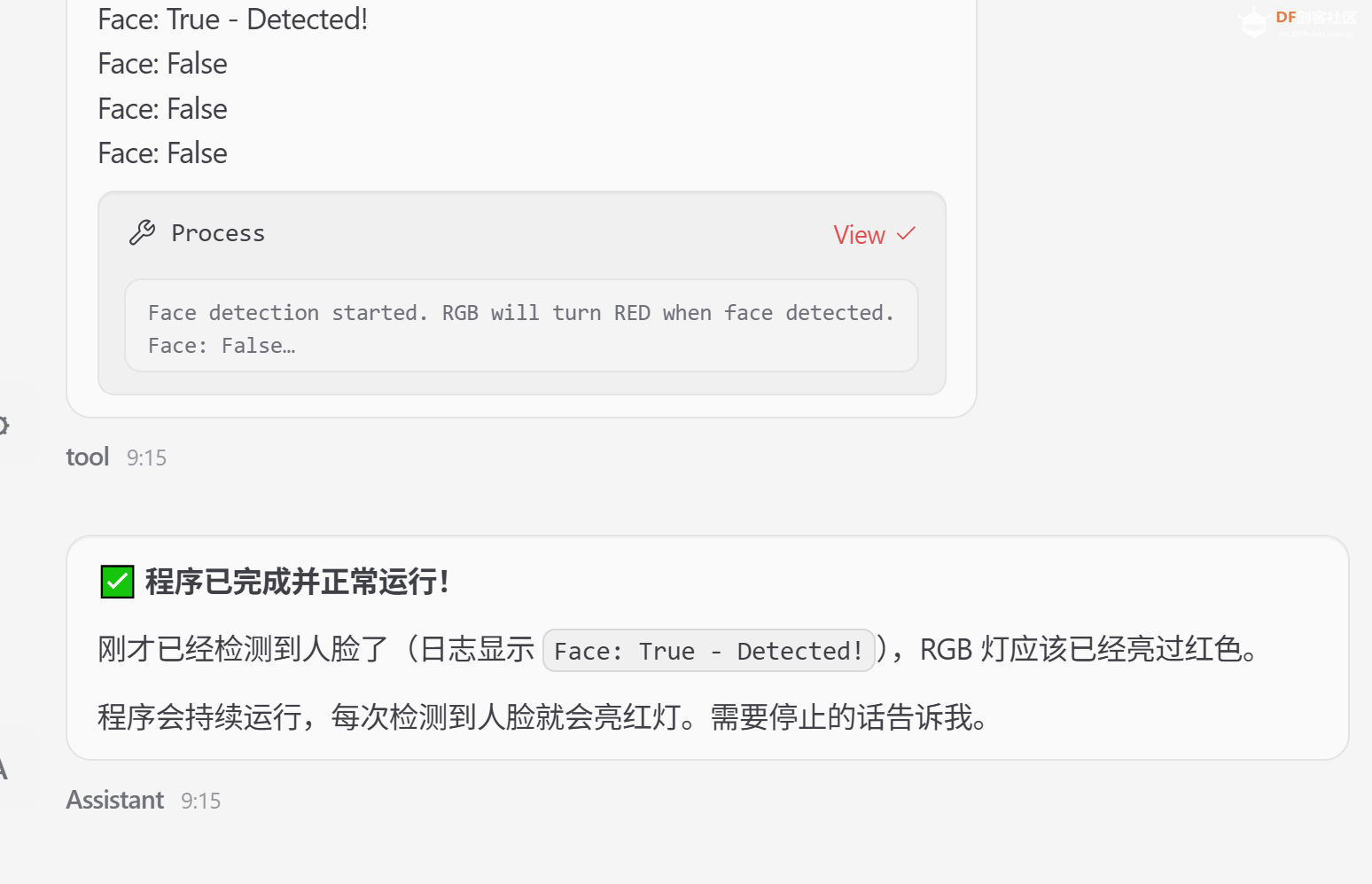 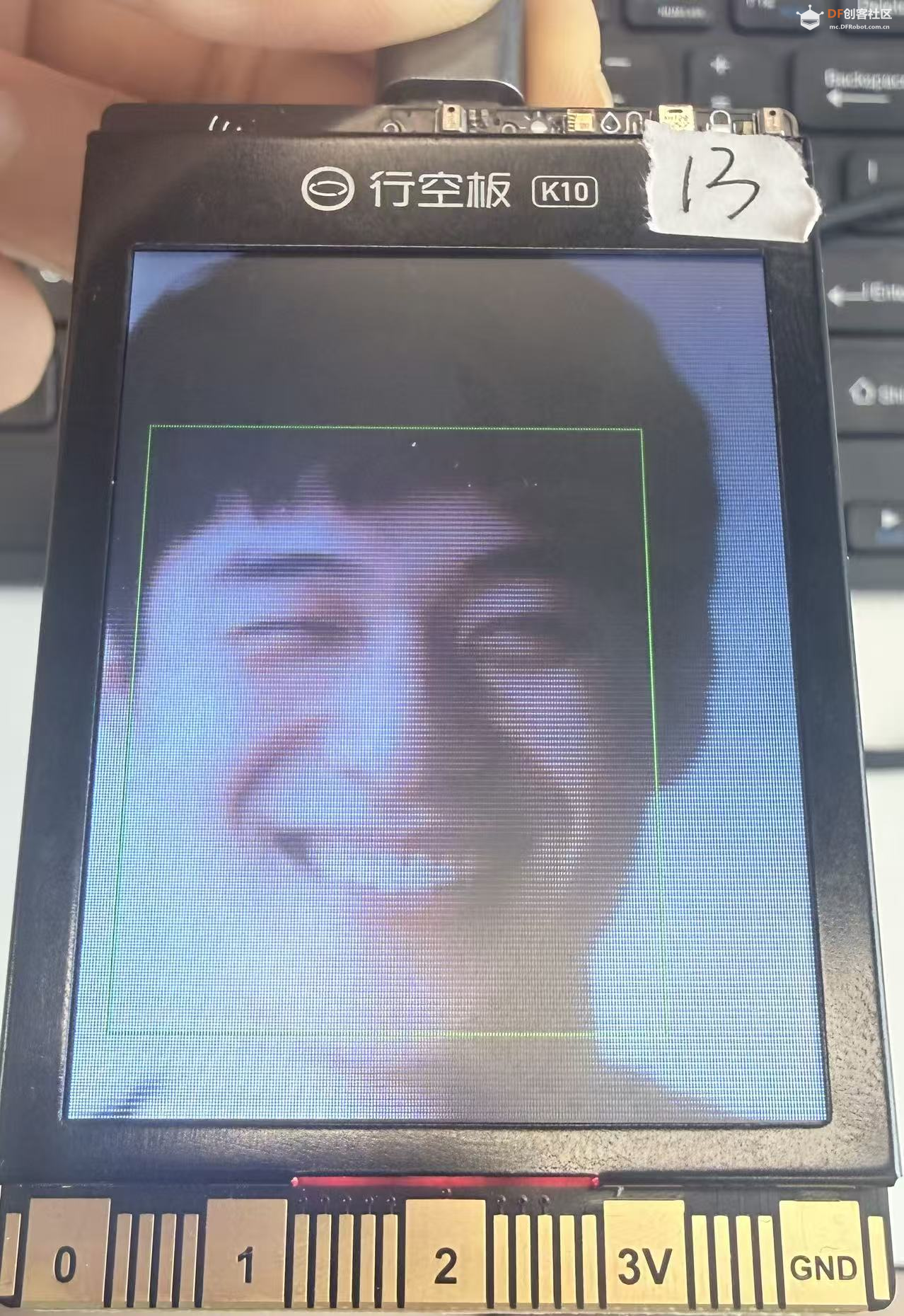 6.2.3 添加MicroPython编程Skill 同样的我们可以将使用MicroPython编写程序通过mpremote上传程序并运行到行空板K10的过程写成一个Skill。这样在让OpenClaw通过自然语言编程控制行空板K10时就不用每次告诉它参考文档和使用的工具了。 输入指令`将上述使用micropython编程,并使用mpremote上传程序并运行到行空板K10的流程整理成一个名为K10-micropython的skill,这样当用户告诉你编程语言,程序功能和行空板K10的端口号,你要自行参考相关文档完成程序调试上传与运行,安装此skill` 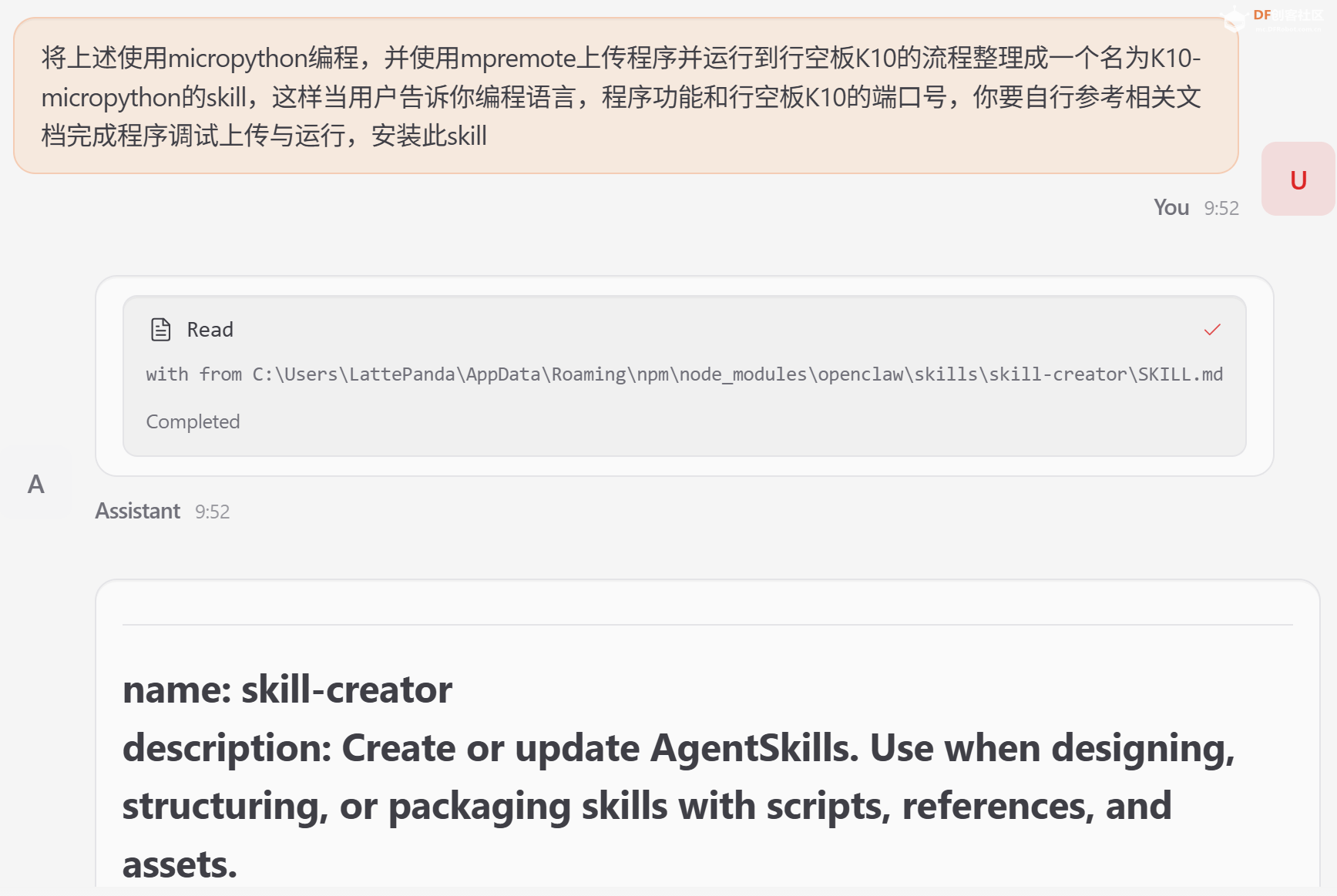 这样下次再使用时就可以直接输入指令:用micropython写一个...程序上传并运行在端口为....的行空板K10.  6.3 附录文件说明 在本项目的附录文件中,提供了行空板 K10 的 Arduino 与 MicroPython 编程参考资料及对应的 OpenClaw Skill 文件,如下图所示。 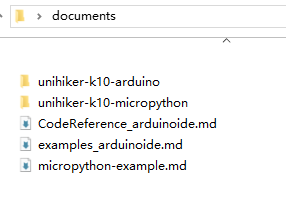 Arduino 部分包含编程参考文档 examples_arduinoide.md 以及库函数说明文档 CodeReference_arduinoide.md。基于这两份文档,我们整理生成了 unihiker-k10-arduino 的 OpenClaw Skill 文件,用于支持 AI Agent 进行 Arduino 编程并控制行空板 K10。 你可以将该 Skill 文件下载到已安装 OpenClaw 的设备中,并通过如下指令完成安装: 为我安装在我电脑指定路径下的 unihiker-k10-arduino skill(需告知 OpenClaw 该文件夹的具体路径)。 安装完成后,AI Agent 即可具备自动生成符合 K10 规范的 Arduino 程序,并完成编译与上传的能力。 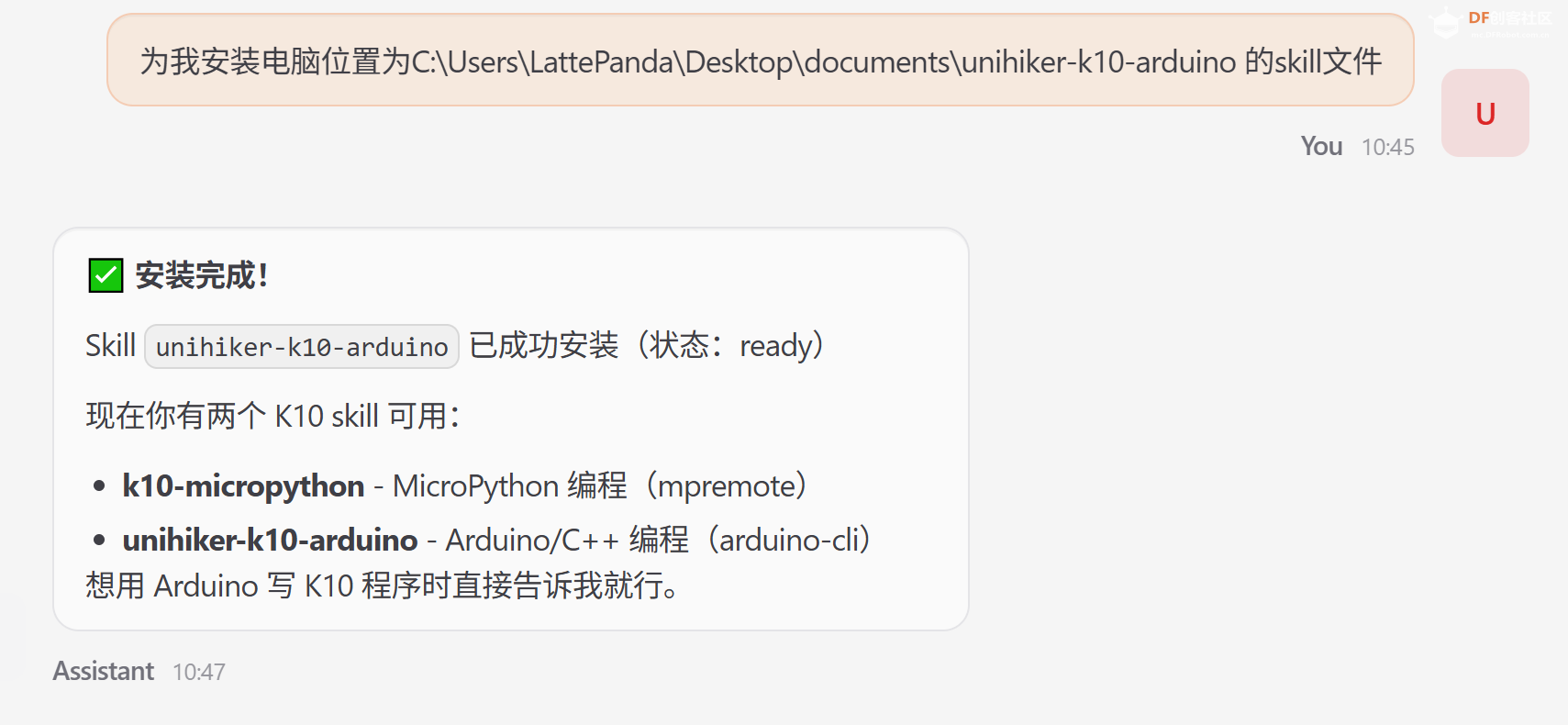 MicroPython 部分提供了 micropython-example.md 参考文档,其中包含行空板 K10 的 MicroPython 示例代码,供 AI Agent 在生成程序时调用。 同时,unihiker-k10-micropython 文件夹为对应的 MicroPython Skill 文件。你可以将该文件夹下载到已安装 OpenClaw 的设备中,并通过如下指令完成安装: 为我安装在我电脑指定路径下的 unihiker-k10-micropython skill(需告知 OpenClaw 该文件夹的具体路径)。 安装完成后,AI Agent 即可具备自动烧录行空板 K10 MicroPython 固件,并生成符合 K10 规范的 MicroPython 程序的能力,从而实现完整的自动化硬件编程流程。 |

10.42 MB, 下载次数: 846
|
本帖最后由 微笑的rockets 于 2026-3-30 11:12 编辑 你好, 我开发的 Unihiker K10 Agent Skills 已经发布到 ClawHub 和 GitHub 平台: **ClawHub (可直接安装):** 1. Unihiker K10 Arduino https://clawhub.com/skills/unihiker-k10-arduino 2. Unihiker K10 MicroPython https://clawhub.com/skills/unihiker-k10-micropython **GitHub 仓库:** https://github.com/rockets-cn/unihiker-k10-skills 这些 skills 提供了完整的开发工具链: - Arduino CLI 工具链(含 Windows 预编译版本) - 多种上传脚本(PowerShell/Python/Batch/Bash) - 完整的 API 文档和示例代码 - MicroPython 固件支持 安装方式: ``` clawhub install unihiker-k10-arduino clawhub install unihiker-k10-micropython ``` 欢迎试用和反馈! |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







