|
|
[项目] 168种传感器系列实验(217)--C4002 模块十二个小实验项目 |
|
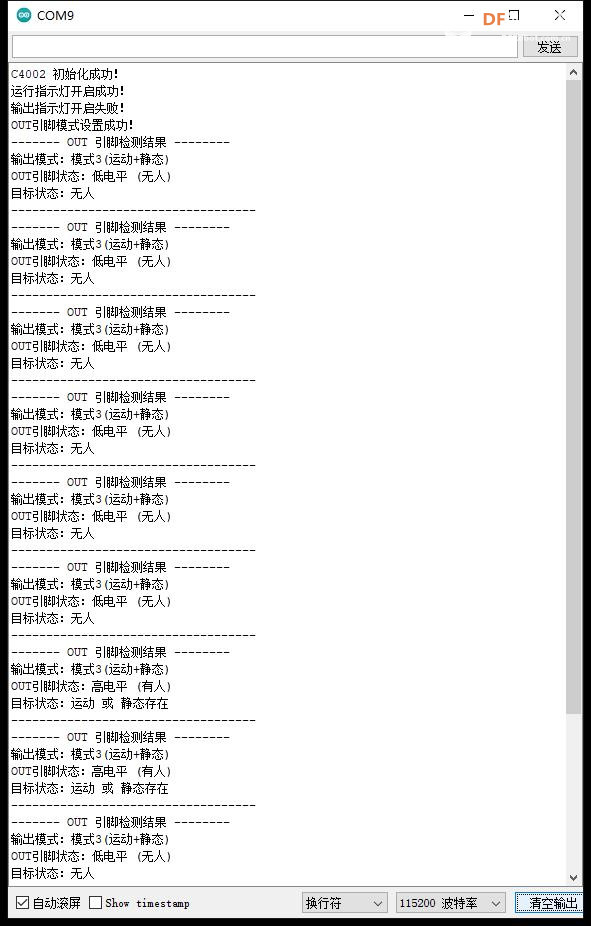
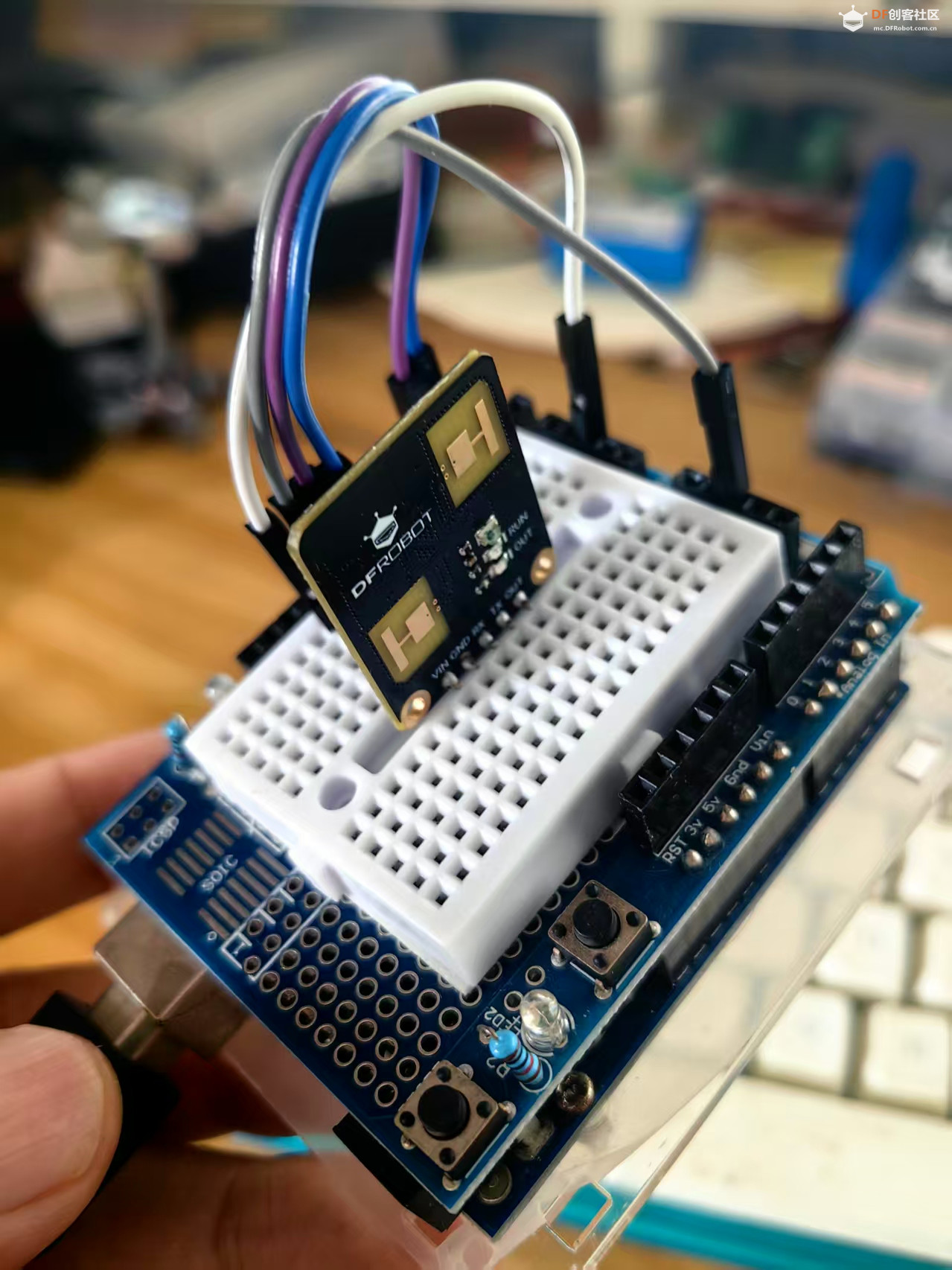
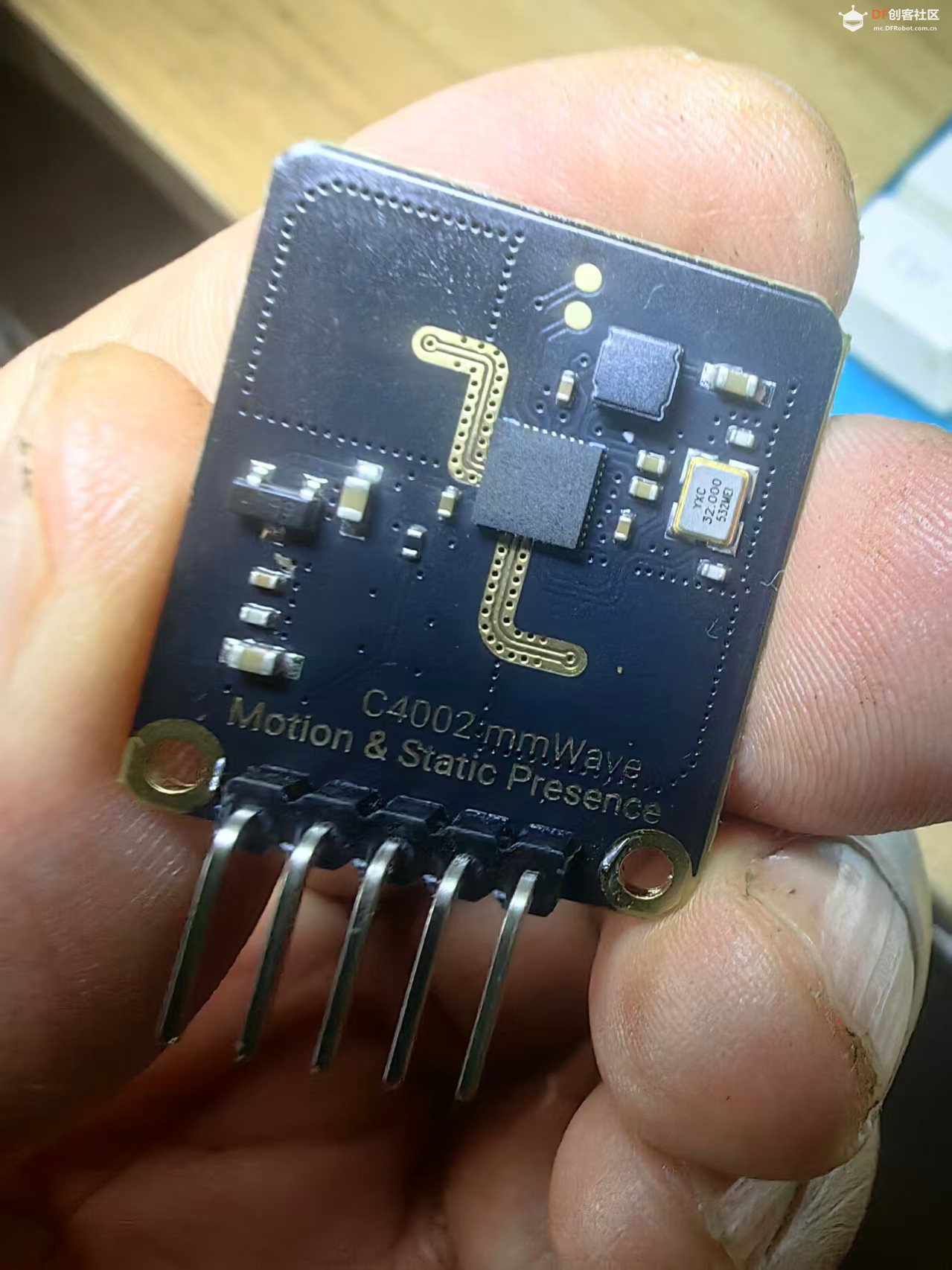
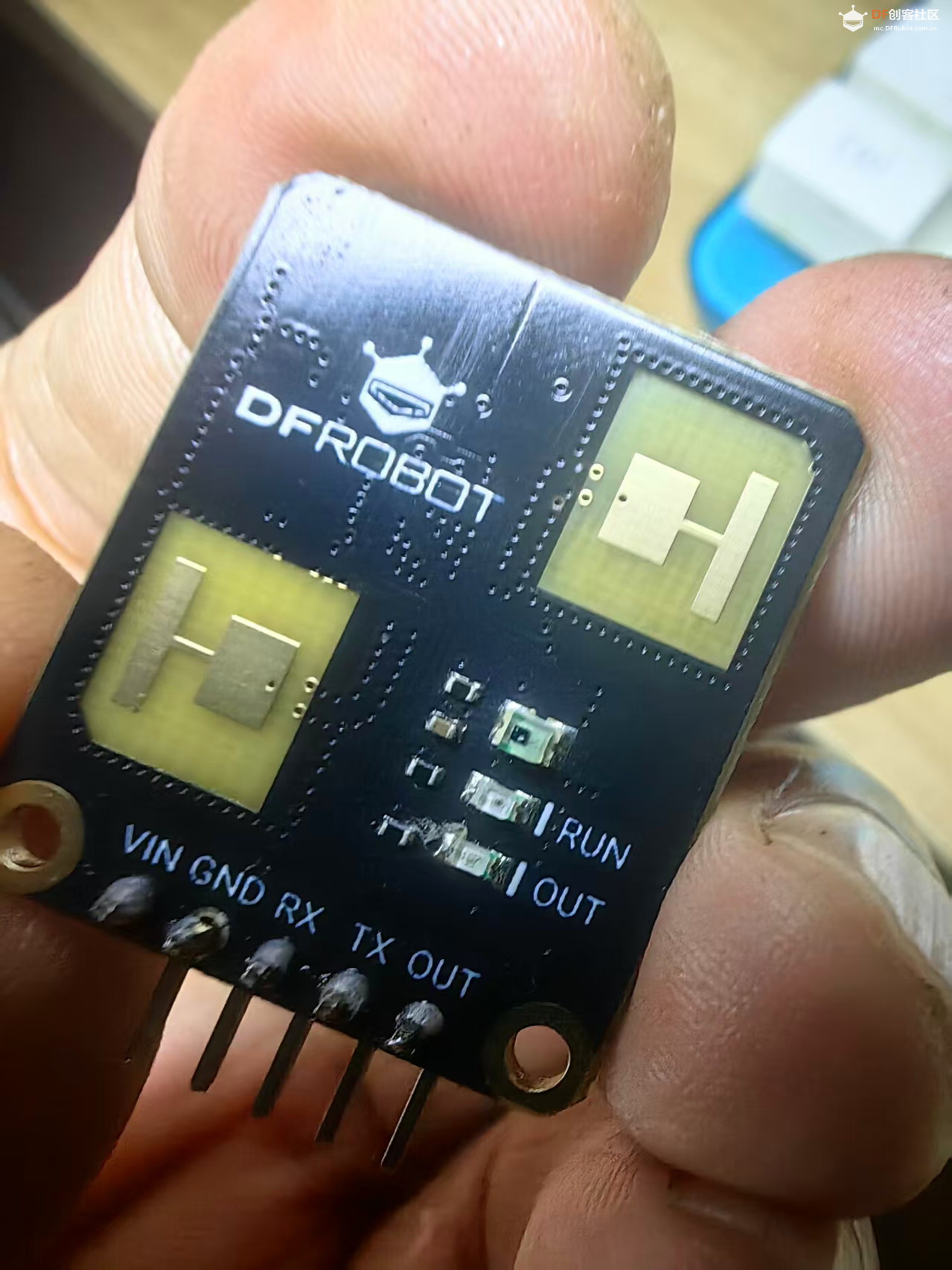
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百一十七:C4002 毫米波运动与静态存在检测模块人体存在传感器 案例九:C4002毫米波雷达 —— 通过 OUT 引脚获取检测结果(极简硬件触发) 通过 C4002 的 OUT 硬件引脚输出高低电平,判断是否有人,不需要解析复杂串口数据,最简单、最稳定。 Arduino Uno 完整接线 C4002 VCC → 5V C4002 GND → GND C4002 TX → D4 C4002 RX → D5 C4002 OUT → D6 三种 OUT 模式说明 Mode1 → 只有运动才输出高电平 Mode2 → 只有静态存在才输出高电平 Mode3 → 运动 + 静态 都输出高电平(默认,最常用) |
|
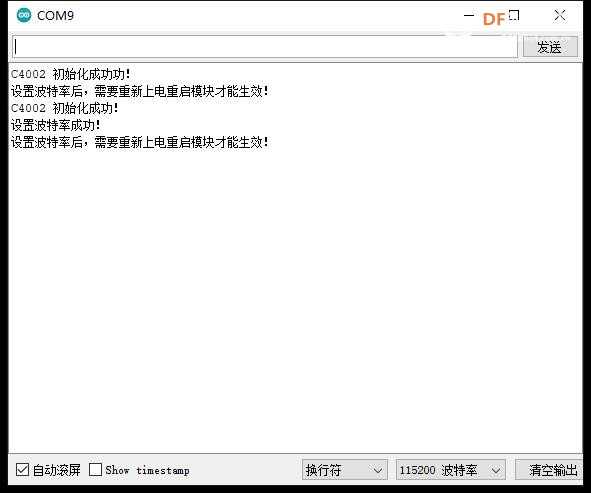
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百一十七:C4002毫米波运动与静态存在检测模块人体存在传感器 案例十:C4002毫米波雷达 —— 设置串口波特率 |
|
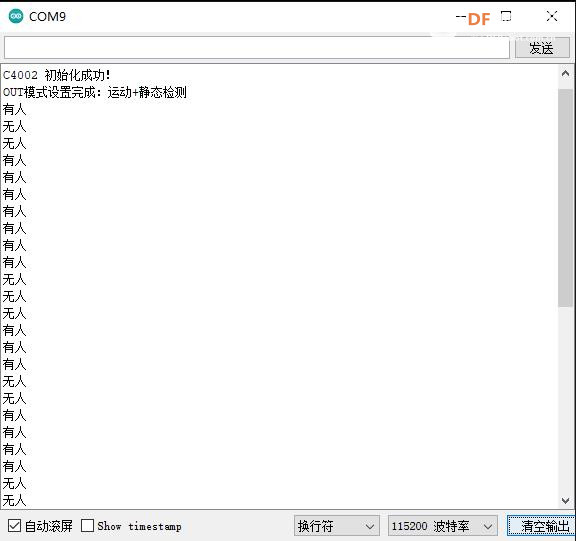
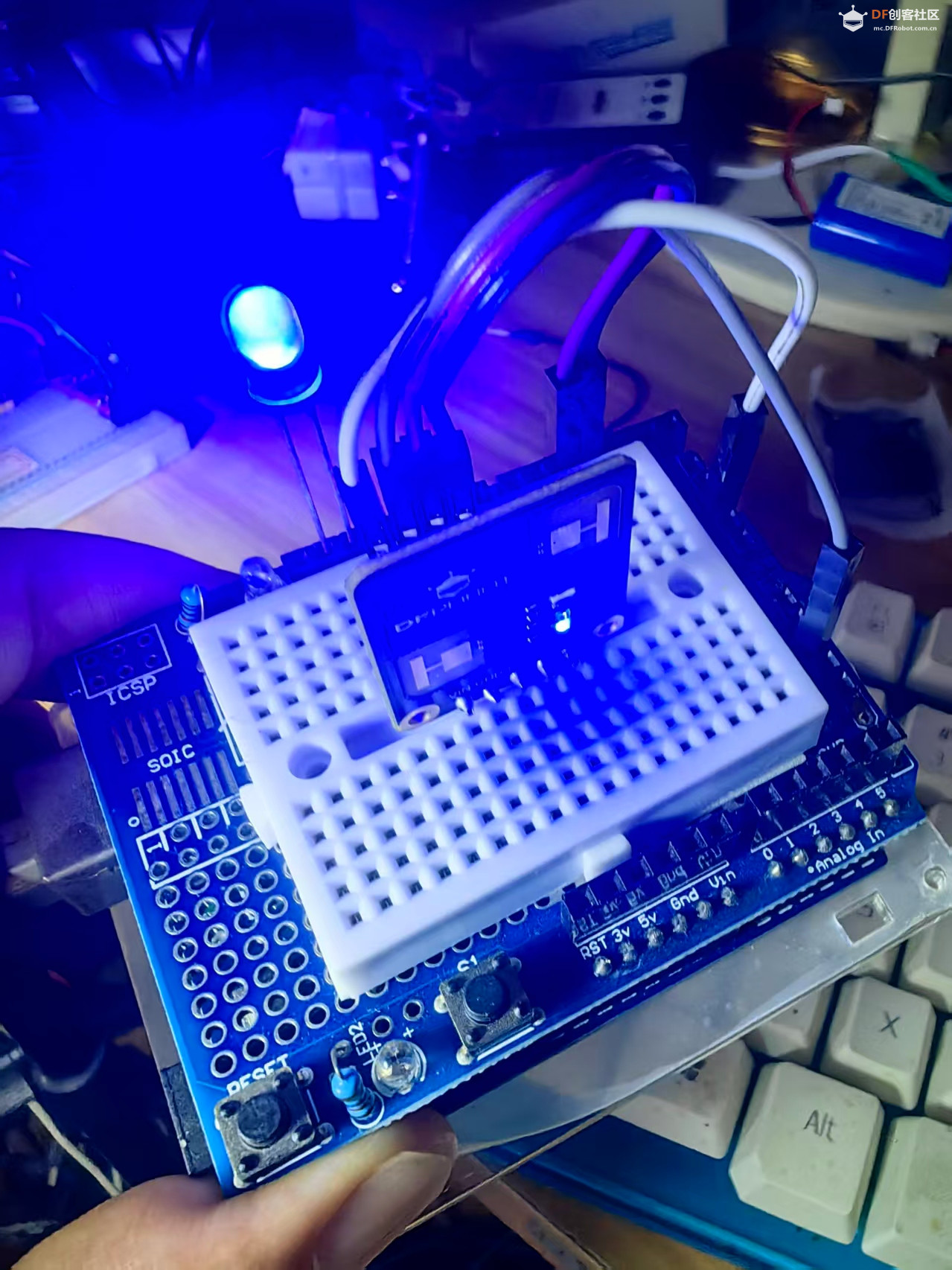
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百一十七:C4002毫米波运动与静态存在检测模块人体存在传感器 案例十一:OUT 引脚检测 + D13 灯 + D12 蜂鸣器 接线 C4002 ↔ Arduino Uno VCC → 5V GND → GND TX → D4 RX → D5 OUT → D6 外设 D13 → LED(有人亮) D12 → 蜂鸣器(有人响) |
|
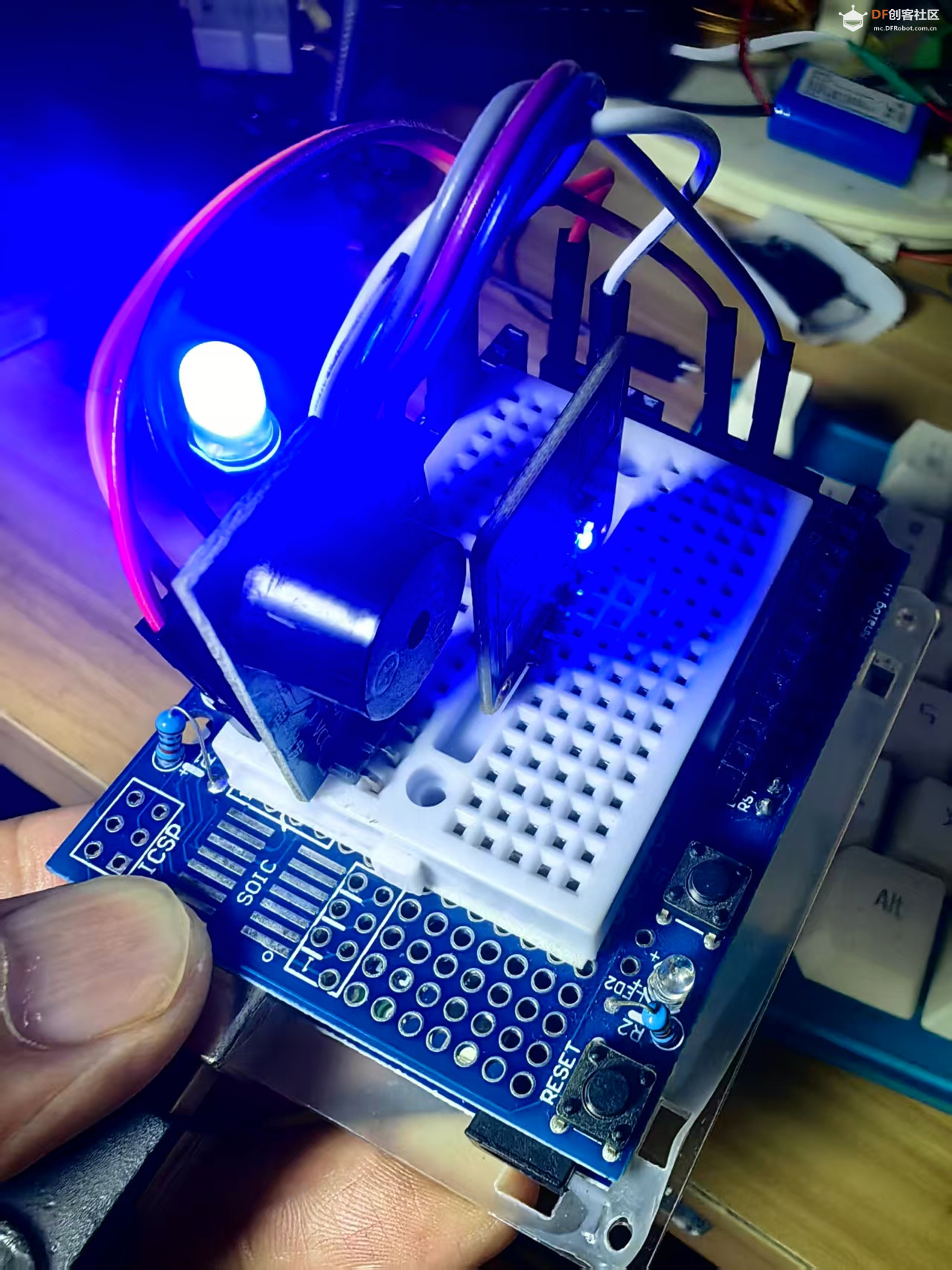
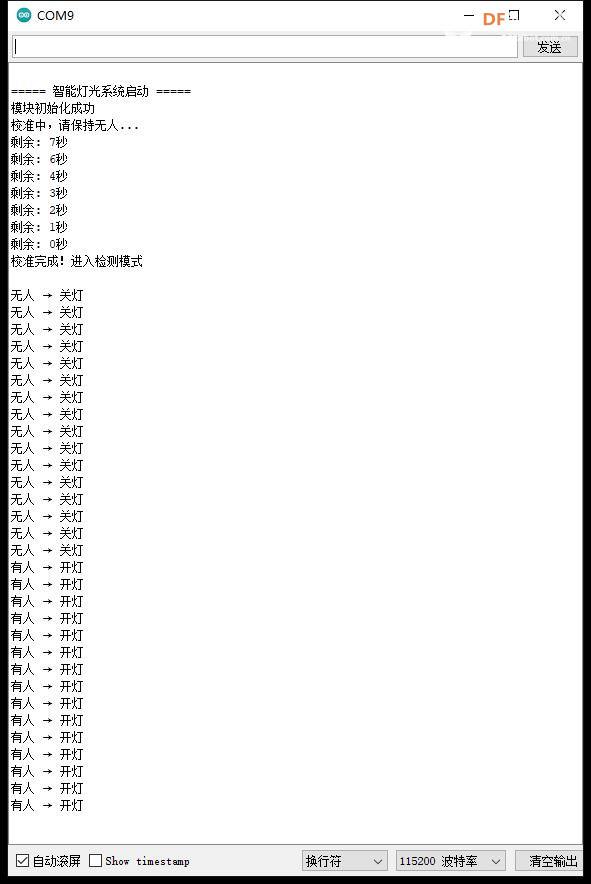
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百一十七:C4002 毫米波运动与静态存在检测模块人体存在传感器 案例十二:校准后自动检测人体,控制LED(智能灯光控制) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






