|
378| 7
|
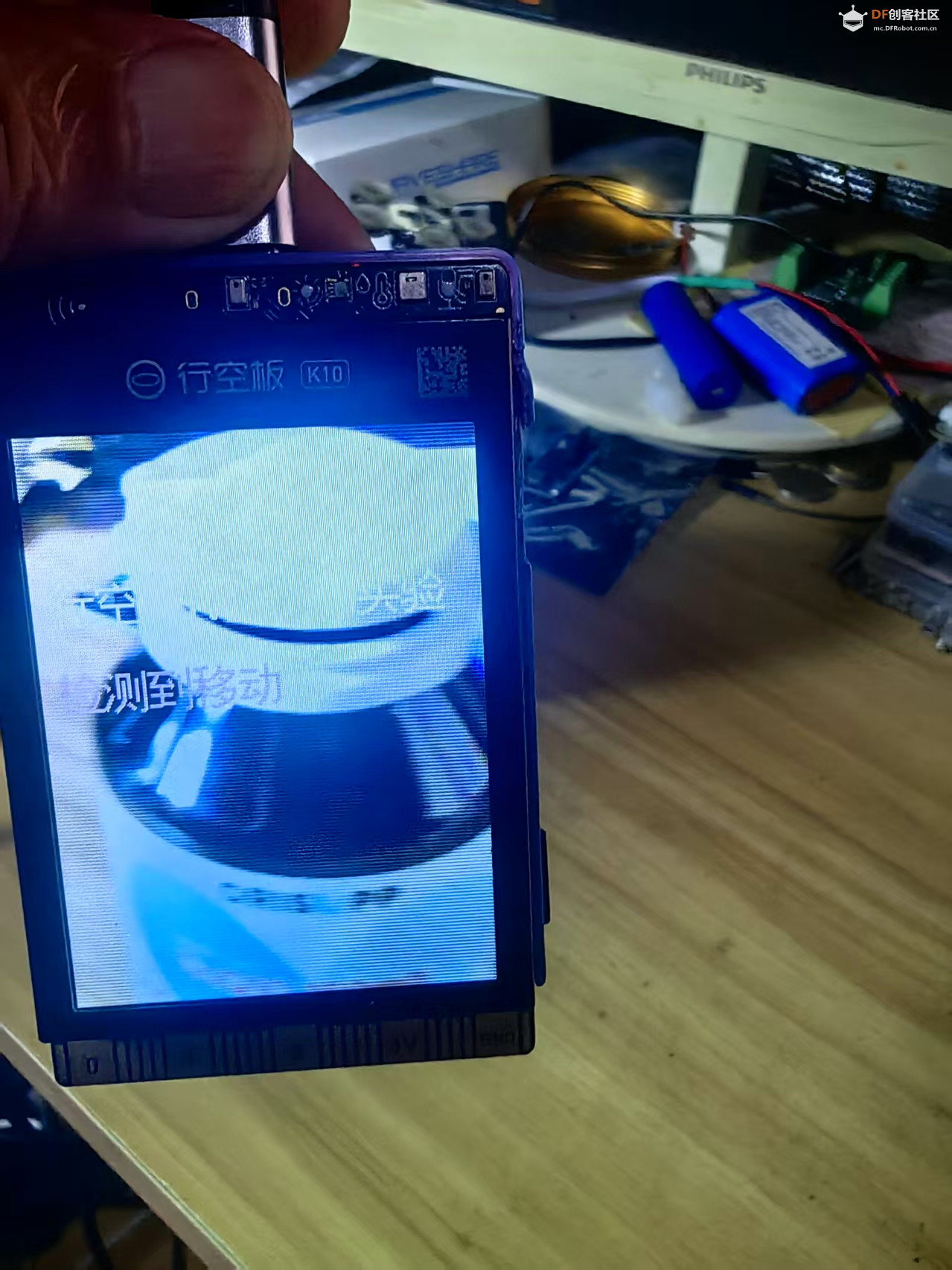
[K10教程] 【花雕动手做】K10 系列实验之屏幕上获取移动检测结果 |
 行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成2.8寸LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等AI人工智能项目。 主要特点 集成摄像头&内置算法,可进行离线图像检测 集成麦克风&内置算法,可进行离线语音识别 集成扬声器&内置算法,可进行离线语音合成 2.8寸彩色屏幕,数据展示更清晰 集成度高,利于教学 接口丰富,兼容软件多,扩展性好 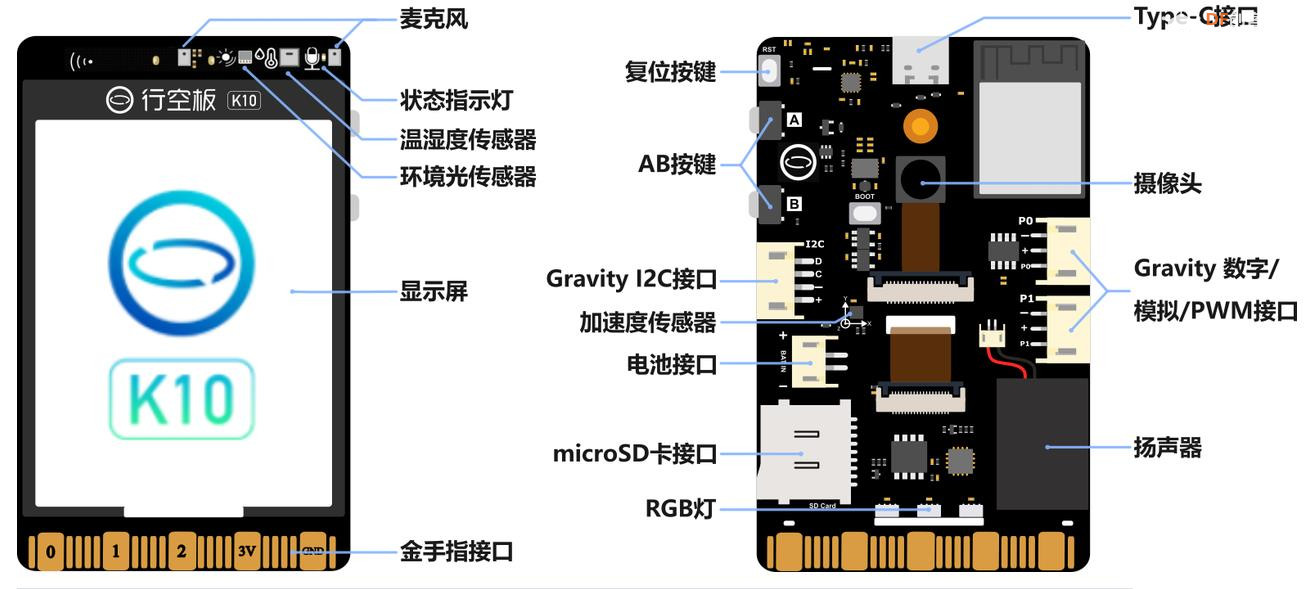 |
|
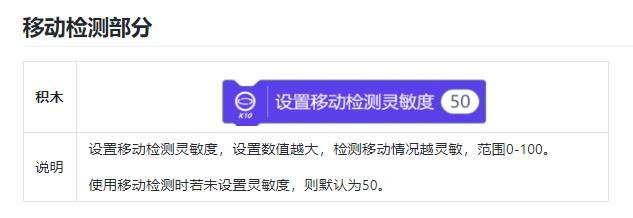
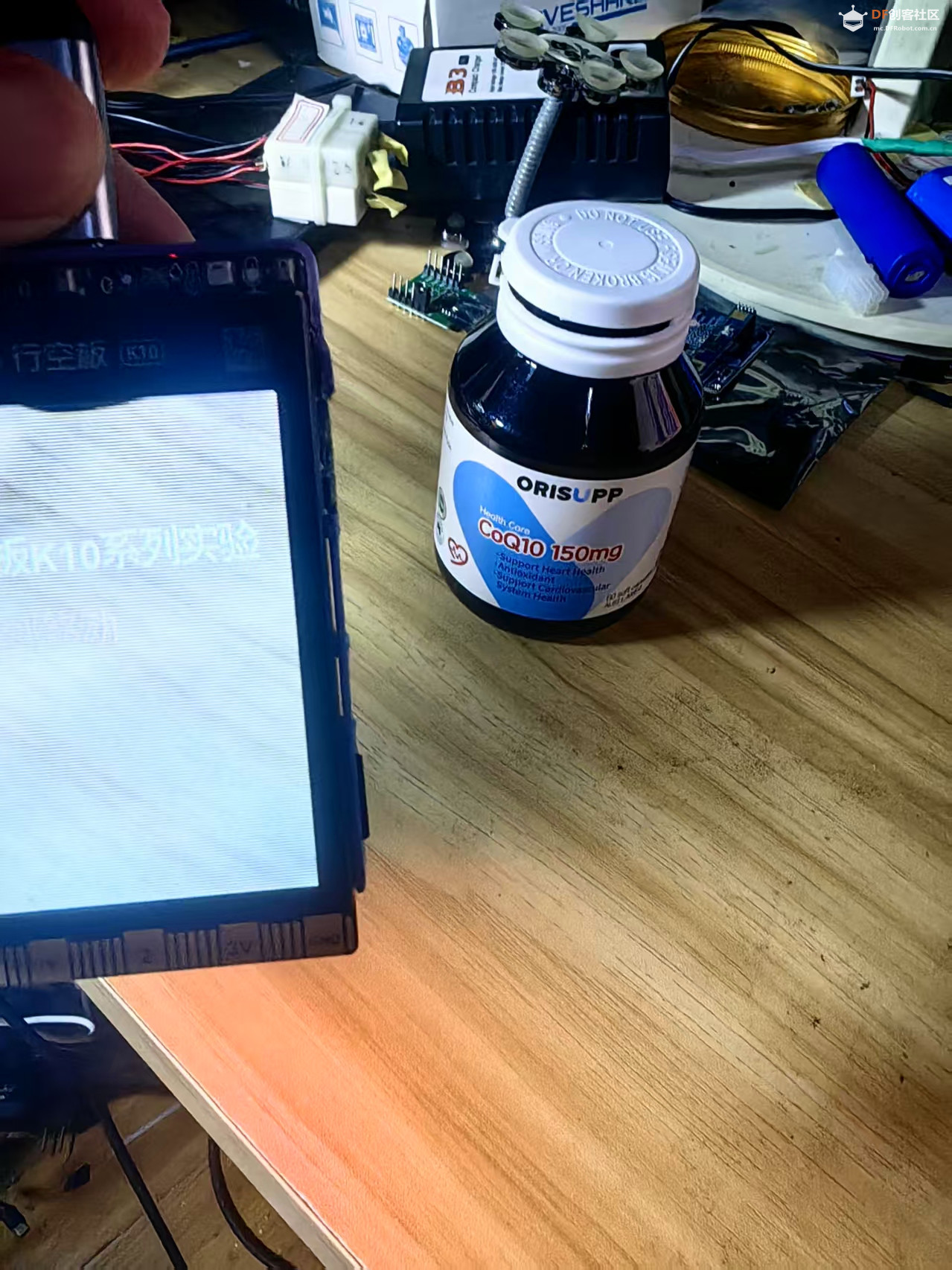
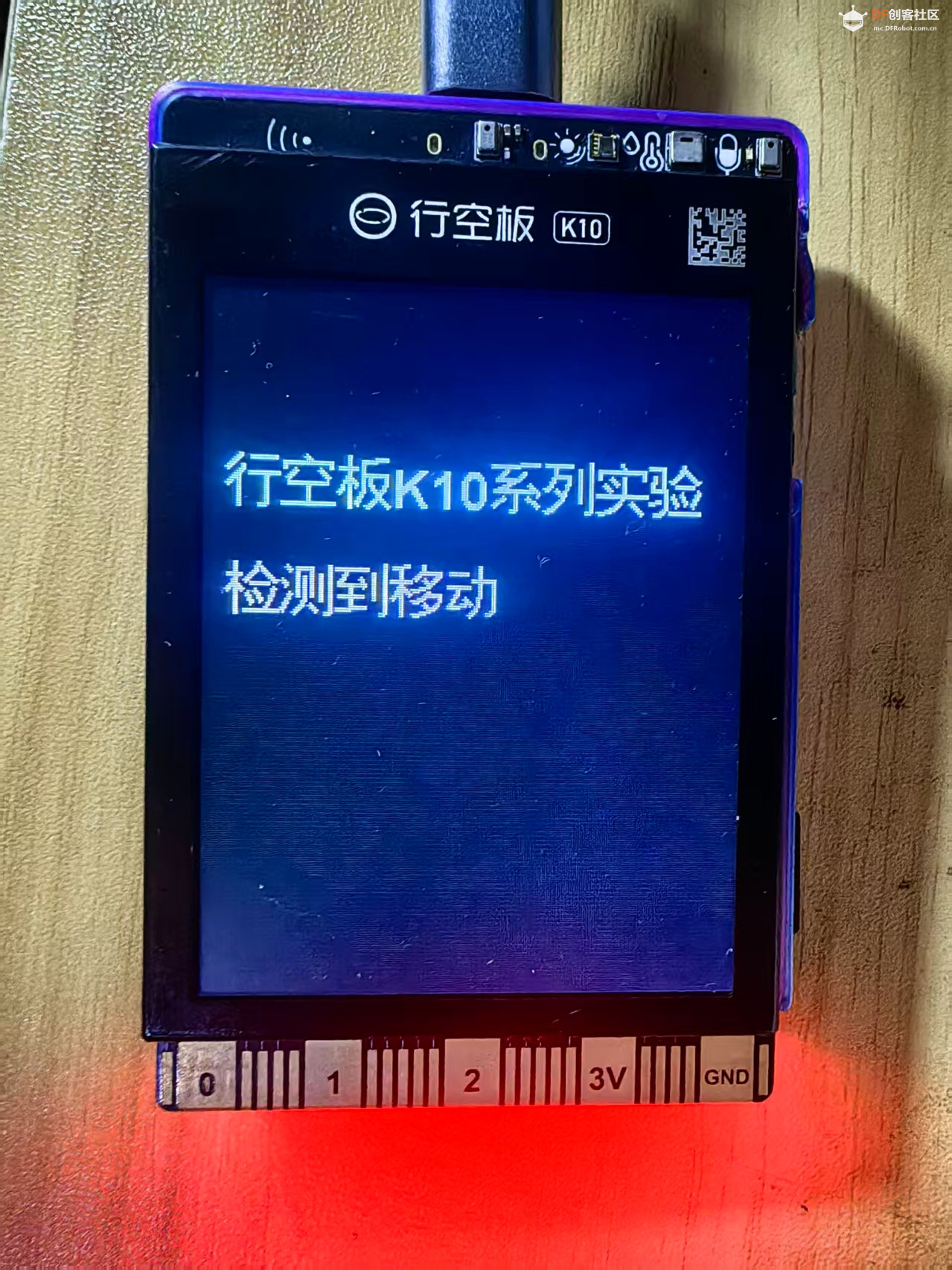
知识点:行空板 K10 移动侦测 AI 检测 + 屏幕显示综合介绍 一、整体方案原理 1. 硬件基础 行空板 K10 搭载ESP32-S3 主控,内置硬件 NPU 神经网络加速器,搭配前置 200 万像素摄像头、2.8 寸彩色 LCD 屏幕、RGB 氛围灯,无需外接模块、无需联网,本地离线实时画面动态检测。 整套功能分为三部分:摄像头采集画面 → NPU 移动 AI 算法运算 → 屏幕文字 + RGB 灯光同步展示检测结果。 2. 移动检测算法逻辑 算法对比前后两帧摄像头画面像素差异,识别画面内物体移动、光影变化; 内置灵敏度阈值可调,过滤微小光影抖动,只识别有效物体运动,区别于人脸 / 猫狗 / 二维码目标识别: 人脸 / 猫狗:识别特定生物面部; 二维码:识别特定图形码; 移动检测 (Move):不区分物体,只要画面产生位移变化就触发。 二、功能清单(屏幕 + 灯光联动) 摄像头实时画面投屏 屏幕底层持续显示摄像头取景画面,检测文字叠加在画面上层,直观看到现场画面。 状态双区分显示 画面静止无移动:清空屏幕文字,RGB 红灯常亮; 检测到物体移动:屏幕打印提示文字,RGB 绿灯同步亮起,视觉双重提醒。 自定义检测灵敏度 可设置阈值 0~100,数值越大越难触发,解决窗外树影、灯光频闪误触发问题。 RGB 亮度可调 限制灯光亮度,避免强光刺眼,适配室内长时间使用。 无阻塞实时检测 代码无延时卡死,画面持续刷新,物体一移动立刻响应,无延迟。 三、完整运行流程 上电初始化:硬件、屏幕、NPU、摄像头依次启动,切换移动检测 AI 模式,设置灯光亮度与移动灵敏度; 待机静止状态:屏幕仅显示摄像头画面,无任何文字,RGB 红灯常亮; 镜头前出现移动物体(手、宠物、行人): AI 瞬间识别画面像素变化; 屏幕上层叠加白色、浅粉色提示文字; RGB 灯同步切换为绿色; 物体完全静止不动: 画布文字立刻清空; RGB 灯切回红色待机,等待下一次移动触发。 四、适用项目场景 室内简易人体感应报警器:有人经过自动亮灯提示; 宠物活动监测:宠物跑动触发灯光提醒; 仓库简易异动监控:画面出现物体移动屏幕报警; 楼道人体感应提示装置; 教学 AI 视觉实验:学习帧差法动态检测、屏幕交互外设联动。 五、使用优势 纯离线本地运算,不用 WiFi、不消耗流量,无网络延迟; 屏幕实时可视化,肉眼同步看到监控画面与检测状态; 红绿灯光状态区分清晰,远距离也能判断是否检测到移动; 灵敏度可调,适配卧室、窗边、仓库等不同光线环境; 代码无阻塞,实时响应,不会出现扫码类项目 2 秒卡死的问题。  |
|
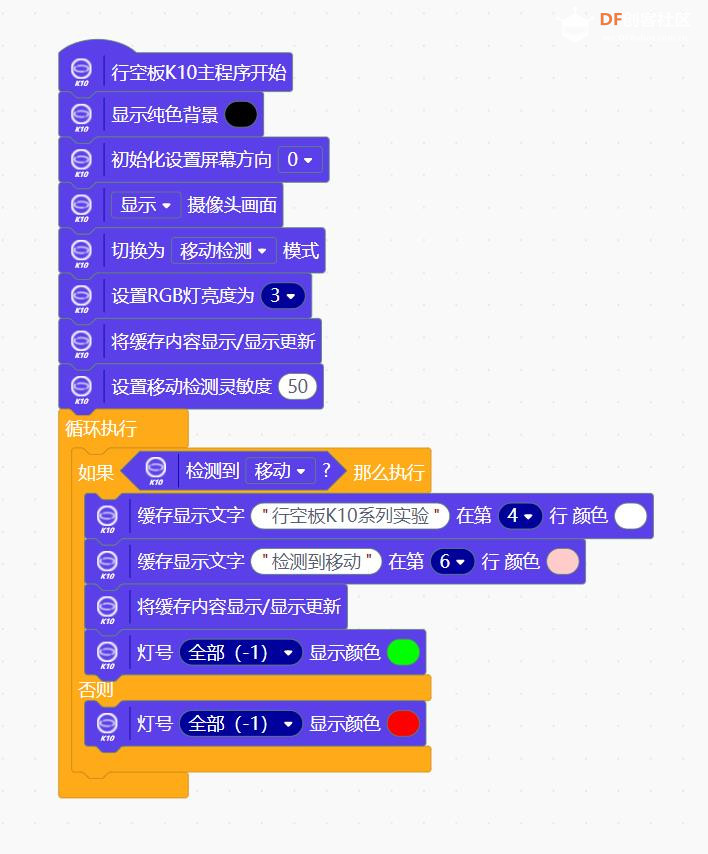
【花雕动手做】行空板 K10 系列实验之摄像头识别移动检测后显示在K10屏幕上 实验开源代码 |
|
代码解读 一、头文件与全局对象 行空板 K10 硬件库,封装屏幕、画布、RGB 彩灯、摄像头、画面渲染全部外设操作。 离线 AI 视觉库,依托 ESP32-S3 内置 NPU,提供人脸、猫狗、二维码、移动侦测四种离线视觉算法。 全局硬件主控对象,屏幕、灯光、摄像头所有操作都通过k10调用。 屏幕朝向参数,2= 竖直正向显示;移动检测推荐竖屏,横屏容易误触发、识别不稳定。 AI 专用对象,负责 NPU 初始化、切换识别模式、设置移动灵敏度、判断画面是否存在移动物体。 二、setup () 上电初始化(仅开机执行 1 次) 关键接口说明:ai.setMotinoThreshold(50) 阈值范围:0 ~ 100 数值越小:轻微光影、微小移动就会触发检测; 数值越大:需要大幅度物体移动才会判定为移动; 本代码设 50,中等灵敏度,兼顾灵敏与抗光影误触发。 初始化执行顺序 硬件初始化 → 屏幕初始化 → AI 加速器启动 → 画布 / 摄像头初始化 → 清空旧 AI 模式 → 开启摄像头画面 → 切换移动检测算法 → 设置灯光亮度、移动灵敏度。 三、loop () 主循环(无限循环,核心侦测逻辑) 1. AI 判断函数 返回布尔值: true:画面存在移动的物体 / 光影变化; false:画面完全静止,无动态变化。 2. 两大分支逻辑 分支 1:检测到移动(if) 在屏幕固定行数打印两行提示文字; 刷新画布,文字显示在摄像头画面上层; 全部 RGB 灯切换为绿色,作为移动提醒。 分支 2:画面静止(else) 清空画布所有文字,恢复纯净摄像头画面; RGB 灯切换为红色常亮,代表待机静止状态。 四、完整运行流程 开发板上电,自动初始化硬件、AI、摄像头,开启移动侦测; 镜头前无物体移动:屏幕仅显示摄像头画面,RGB 红灯常亮; 手、物体在镜头前移动:屏幕弹出文字提示,RGB 立刻切换绿灯; 物体静止不动后,文字瞬间清空,灯光切回红色待机。 全程无delay()阻塞,实时持续侦测,响应速度快; 红绿灯光区分两种状态,直观易懂; 可自定义移动灵敏度阈值,适配室内、强光等不同环境; 限制 RGB 亮度,灯光柔和不刺眼。 五、使用注意事项 设备必须竖直摆放,横屏会大幅降低检测稳定性、增加误触发; 避开持续晃动的光影(窗帘、窗外树影、频闪灯光); 阈值调节参考:居家室内 40~60,强光窗边 70~90; 禁止在 loop 循环里频繁切换 AI 模式(移动 / 人脸 / 二维码),容易黑屏、设备重启。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶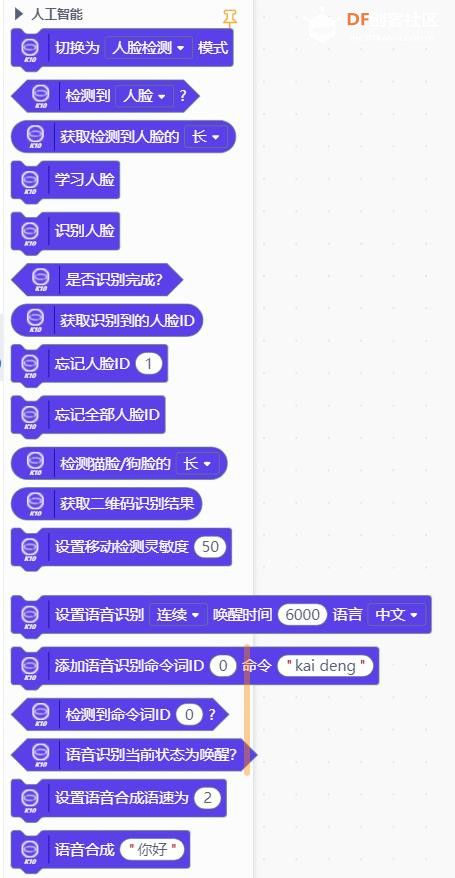




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






