|
30732| 40
|
[案例教程] 【NB-IoT 物联网开发板 TinkerNode】GPS追踪器 |

|
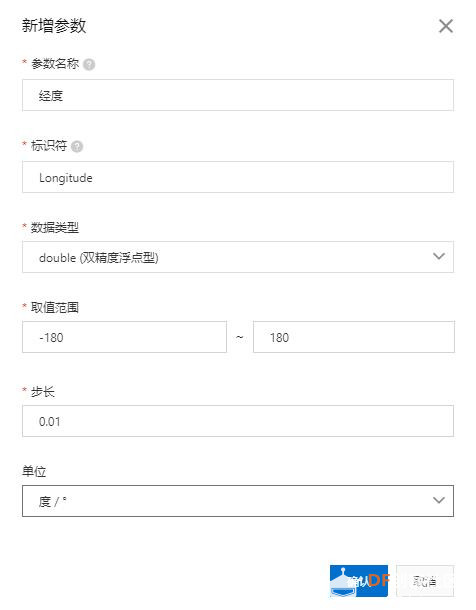
hello,大家好。这次项目我们将用TinkerNode制作一个车载GPS跟踪器,学习和使用TinkerNode的GPS功能,并使用NB-IoT技术将GPS信息上传至阿里云平台,通过云端查询实时路径。 项目的主要目的: ①学习TinkerNode的GPS功能的使用 ②学习阿里云平台GPS相关功能的使用 项目视频 为了方便大家进行学习,我们为大家提供了视频版本的项目教程. 元器件清单 TinkerNode NB-IoT开发板 x1 1.项目相关功能介绍 首先,我们先来了解一下本次项目中使用到TinkerNode的功能。 GPS TinkerNode板载的BC20模组,除了NB-IoT功能外,还带有GNSS定位功能,可以识别GPS和BeiDou两种卫星定位系统。 在使用GPS功能前,需要按照产品wiki将GNSS的陶瓷天线安装在TinkerNode的GNSS天线接口上,如下图所示。 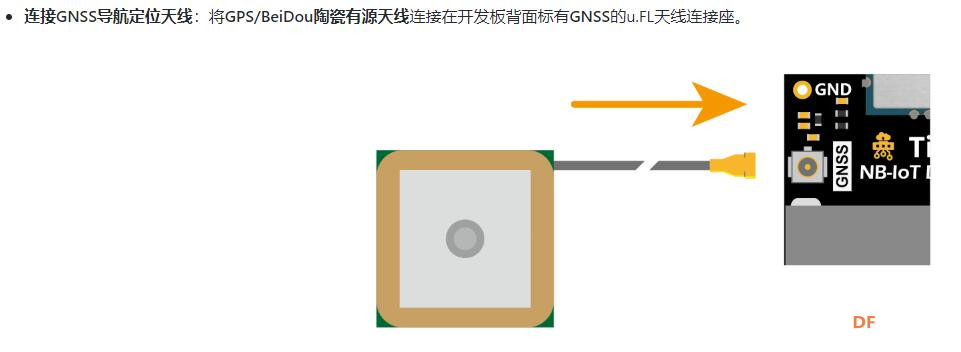 PS:在使用GNSS定位功能时,天线要朝向天空,且无遮挡。 2.阿里云平台配置 了解完GNSS功能后,我们开始项目的制作。和之前的项目相同,我们首先需要进行阿里云平台的配置,然后为项目创建产品和设备,配置产品自定义功能(物模型)。 在物联网平台的页面左侧,选择IoT Studio -> 项目管理,点击新建项目,新建一个空白项目,项目名称为“GPS Tracker”,如下图所示。 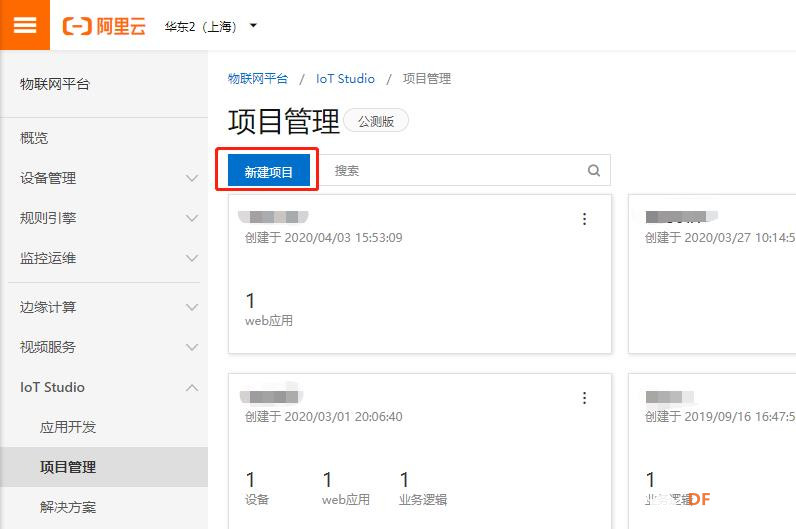 创建完成后,我们会进入“GPS Tracker”项目的管理页面,如下图所示。 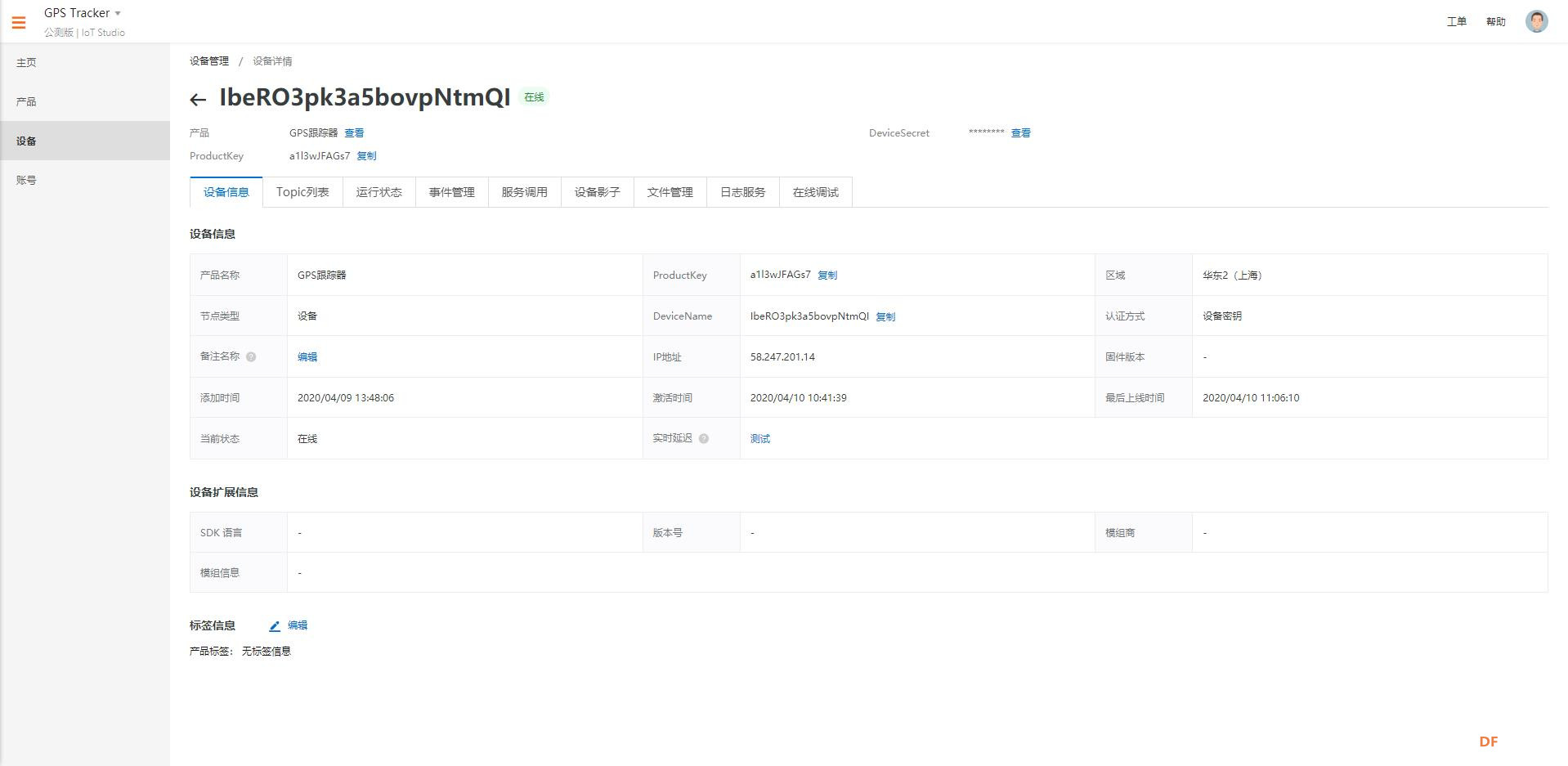 新建产品 在项目管理页面左侧的功能栏点击产品,在弹出的产品页面中选择新建产品,如下图所示。  产品的名称填写“GPS跟踪器”,所属品类选择“自定义品类”,其他选项默认,如下图所示。  完成后点击保存,此时已经在项目下创建了一个名为“GPS跟踪器”的新产品。 功能定义 接下来,我们需要为产品添加功能,也叫作定义产品的“物模型”,物模型创建的过程就是通过协议描述产品的功能,定义产品有几组传感器数据,有什么控制功能,数据的类型是什么。 点击“GPS跟踪器”产品后的查看,进入该产品的管理页面,如下图所示。  在这里我们要对产品进行功能定义,与之前的项目不同的是,除了自定义功能的方式外,本次项目还可以使用阿里云平台已经内置的标准功能,接下来我将会为大家分别介绍这两种方法。 ①标准功能 阿里云平台为了方便客户的使用,内置了多种可以直接使用的标准功能,省去了繁杂的配置过程,节省了客户的开发时间。 选择功能定义 -> 标准功能 -> 添加标准功能 ,如下图所示。  在窗口的搜索栏中,输入“地理位置”,选择任意一个标识符为“GeoLocation”的标准功能,选择后该功能会出现在右侧的已选功能栏,然后点击确定,如下图所示。  添加完成后,可以看到对应的产品功能已经出现在了产品的功能定义中,如下图所示。 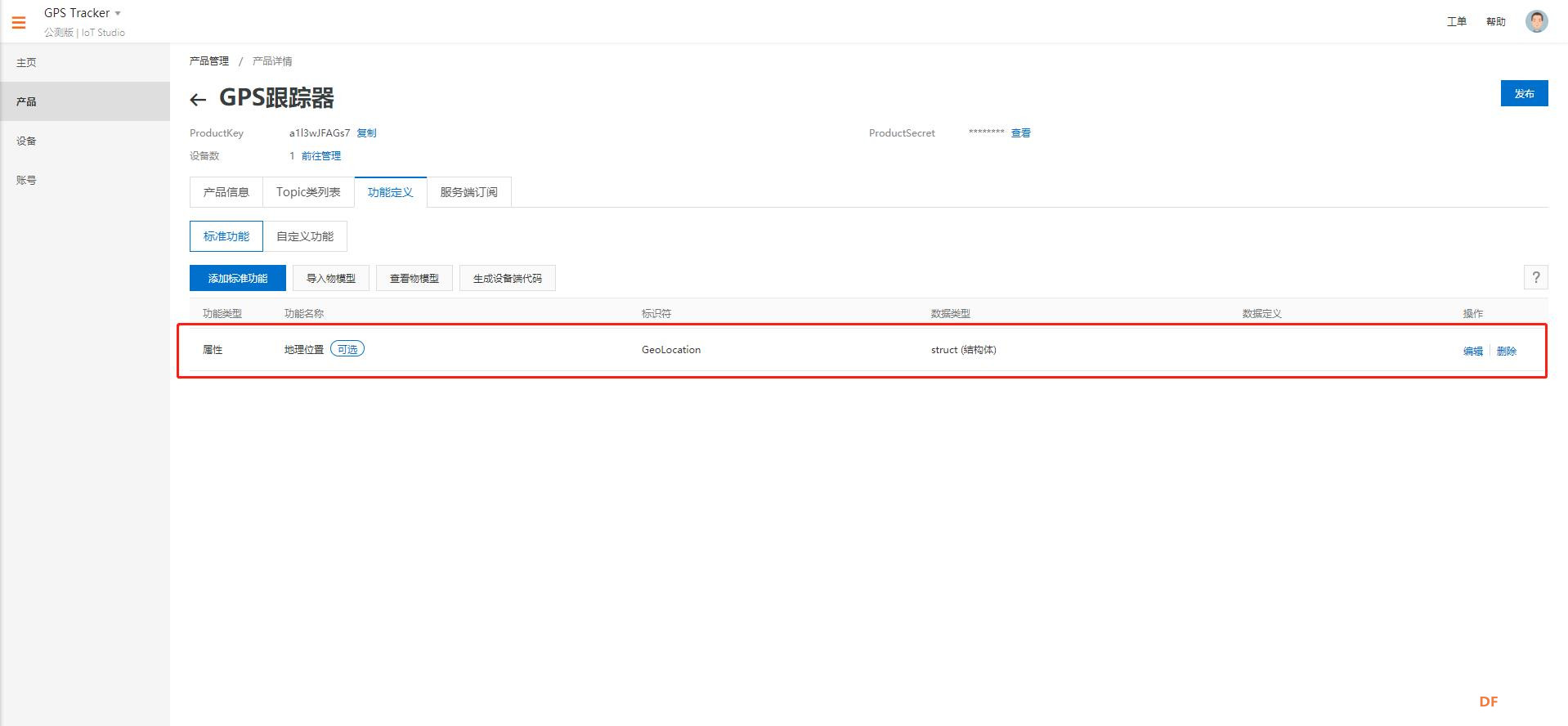 ②自定义功能 如果需要后续自行开发其他功能,想要了解向阿里云平台上传信息时的JSON协议格式,大家也可以进行自定义的功能配置。 PS:如果要进行自定义功能配置,需要删除刚刚创建的标准功能。 在“车载GPS跟踪器”这个项目中,我们需要向云端上传GNSS定位信息中的,经度、纬度和高度,并选择相应的坐标类型,共四个数据。由于TinkerNode与阿里云之间使用的是JSON进行通讯,所以在配置自定义功能时,数据类型要选择“struct(结构体)”。 在功能定义中选择自定义功能,点击添加自定义功能,如下图所示。  在弹出的窗口中填写相关信息,功能名称填写为“地理位置”,标识符填写为“GeoLocation”,数据类型选择“struct(结构体)”,如下图所示。  接下来,让我们为结构体添加JSON对象的参数信息。前面我们已经说过,我们需要上传四个GPS的信息,分别是经度、纬度、高度和坐标类型。 ①经度 点击新增参数,按照下面的表格在弹出的窗口中填写对应信息,如下图所示。
 ②纬度 按照下列表格,填写相关信息。注意纬度的取值范围是“-90~90”,完成后如下图所示。
 ③高度 按照下列表格,填写相关信息。
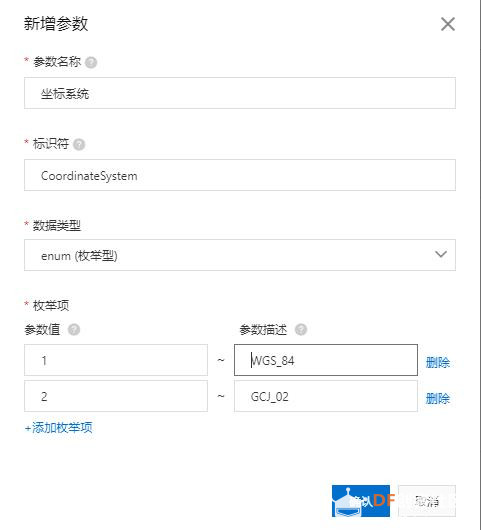
 ④坐标系统 为了描述或确定位置,必须建立坐标系统,坐标只有存在于某个坐标系统才有实际的意义与具体的位置。以下是两种不同类型的坐标类型: WGS_84:国际经纬度坐标标准。 GCJ_02:由国测局制定,是对地理位置进行首次加密后的一种坐标类型。 按照下列信息,填写相关信息。
接下来我们需要为坐标系统增加两个枚举项,信息如下表所示。
 新增设备 完成了产品的功能定义之后,接下来我们需要为产品建立一个设备,这样就可以将TinkerNode连接到阿里云平台,并上传GPS信息了。 在项目管理页面左侧的功能栏点击设备,在弹出的设备页面中选择新增设备,如下图所示。  弹出的窗口中,产品选择“GPS跟踪器”,添加方式选择自动生成,设备数量填写1,点击提交,如下图所示。  3.硬件相关配置 代码调试 在附件中下载项目代码。 ①上传数据格式 在于阿里云进行通信时,需要通过JSON格式进行通信,我们可以从阿里云的官方文档中,找到GPS功能的上传请求示例,如下图所示。 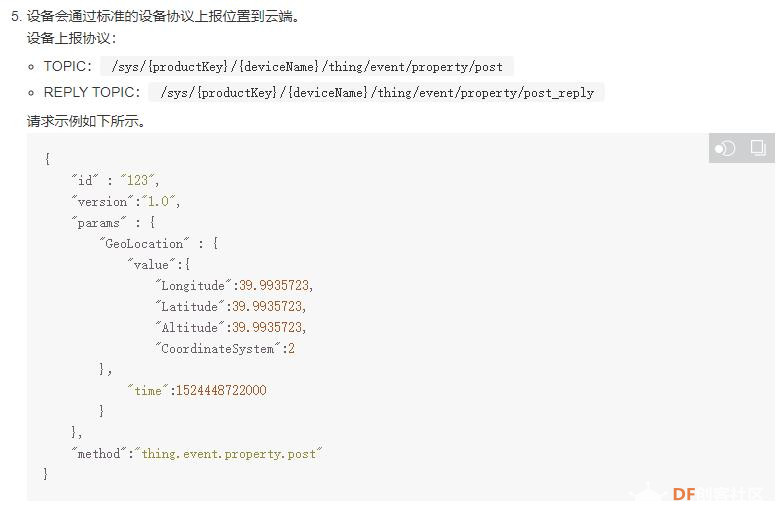 在Arduino代码中,我们需要添加一些转义字符,并将相应的变量名填写到相应位置,最终效果如下列代码所示。 注意:在阿里云中只能使用,国际标准的定位坐标标准,即CoordinateSystem设定为1。 在实际使用中,我们通过TinkerNode的NB-IoT功能向阿里云上传数据时,需要在代码中调用函数"myBC20.publish()"向指定的设备上传数据,实际使用时需要删除换行,代码如下所示。 ②阿里云相关配置 我们需要根据阿里云平台的配置信息,在项目代码中做对应的修改。 在设备页面查看设备证书信息,填写在代码中对应位置。 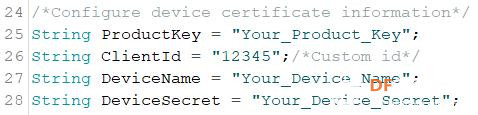 在产品页面查看产品的功能标识符,填写在代码中对应位置。   全部配置完成后,将代码上传至TinkerNode主控板。待代码上传完成后,就可以在阿里云平台上看到设备上传的位置信息了。 查看云平台信息 待代码上传完成后,进入GPS Tracker设备页面,可以看到设备已经是在线状态,点击查看,进入该设备的管理页面,如下图所示。 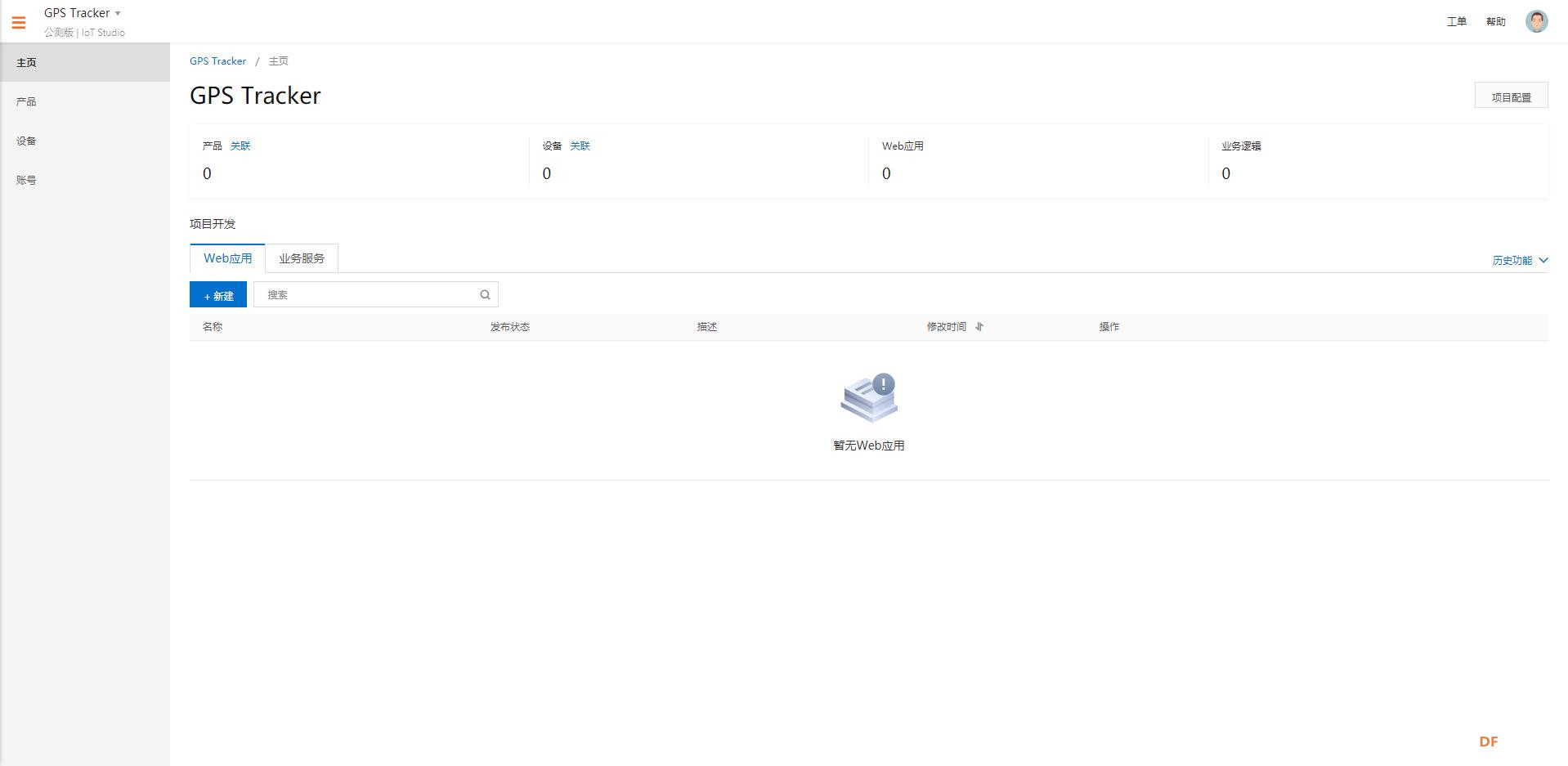 进入设备页面后,点击运行状态,点击查看数据,可以看到TinkerNode上传的GPS信息,如下图所示。  至此,我们已经将GPS信息上传到了云平台。接下来我们将会使用阿里云平台的IoT Studio中的可视化页面功能,将上传的GPS信息展示在地图上。 4.可视化页面制作 点击主页,新建一个Web应用。  名称填写“GPS地图”,点击确认,进入可视化开发界面。 点击左侧的组件,将“设备地图”拖拽到画布中,如下图所示。  点击地图组件,点击右侧的“编辑设备地图”,选择地图组件上显示的设备,如下图所示。  进入设备地图编辑器后,点击选择产品,在弹出的窗口中,选择“GPS跟踪器”产品,点击确定。 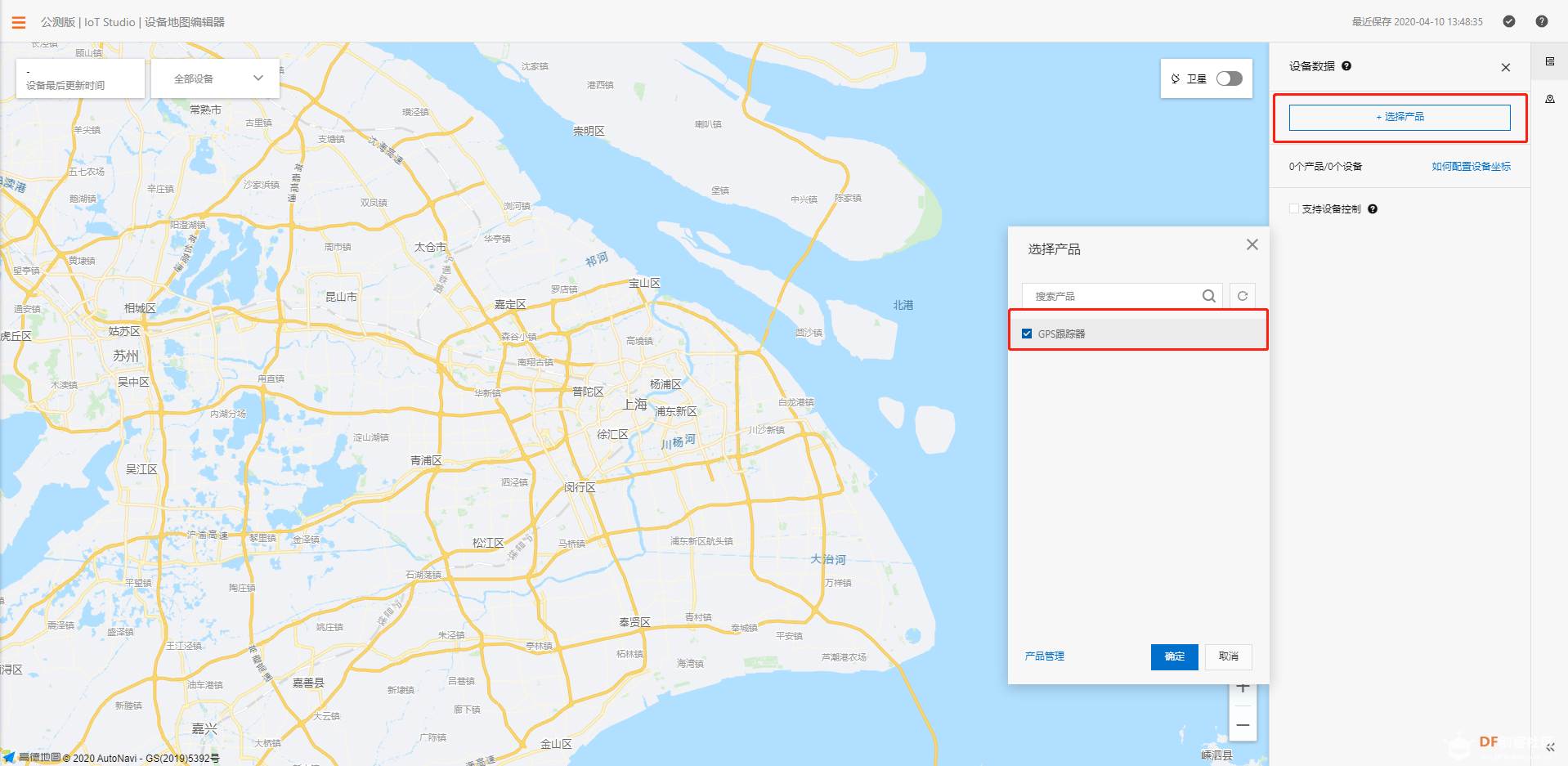 回到可视化开发界面,点击右上角的预览。在弹出的窗口,选择对应的设备,就可以在地图上查看定位信息了。  PS:GPS定位信息同步至地图时,并不完全准确。这是由于地图信息被加密导致的,这是保证国土信息安全的重要手段之一。 5.数据分析 阿里云平台还可以对上传的GPS数据进行数据分析。包括了历史轨迹、热力图和电子围栏等功能。 PS:由于阿里云平台中该部分功能处于频繁更新阶段,可能导致教程中一些接口位置与实际不同。 在物联网平台界面中,点击数据分析。 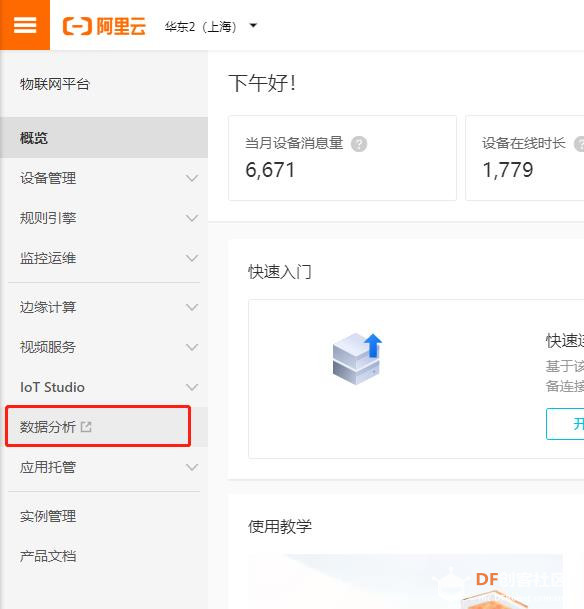 进入到数据分析的页面,在上方的菜单栏中选择“实验室”,可以在页面中看到“空间数据可视化”的功能,如下图所示。  在弹出的页面中,点击创建场景,数据来源选择“物联网平台”,完成后点击下一步,如下图所示。 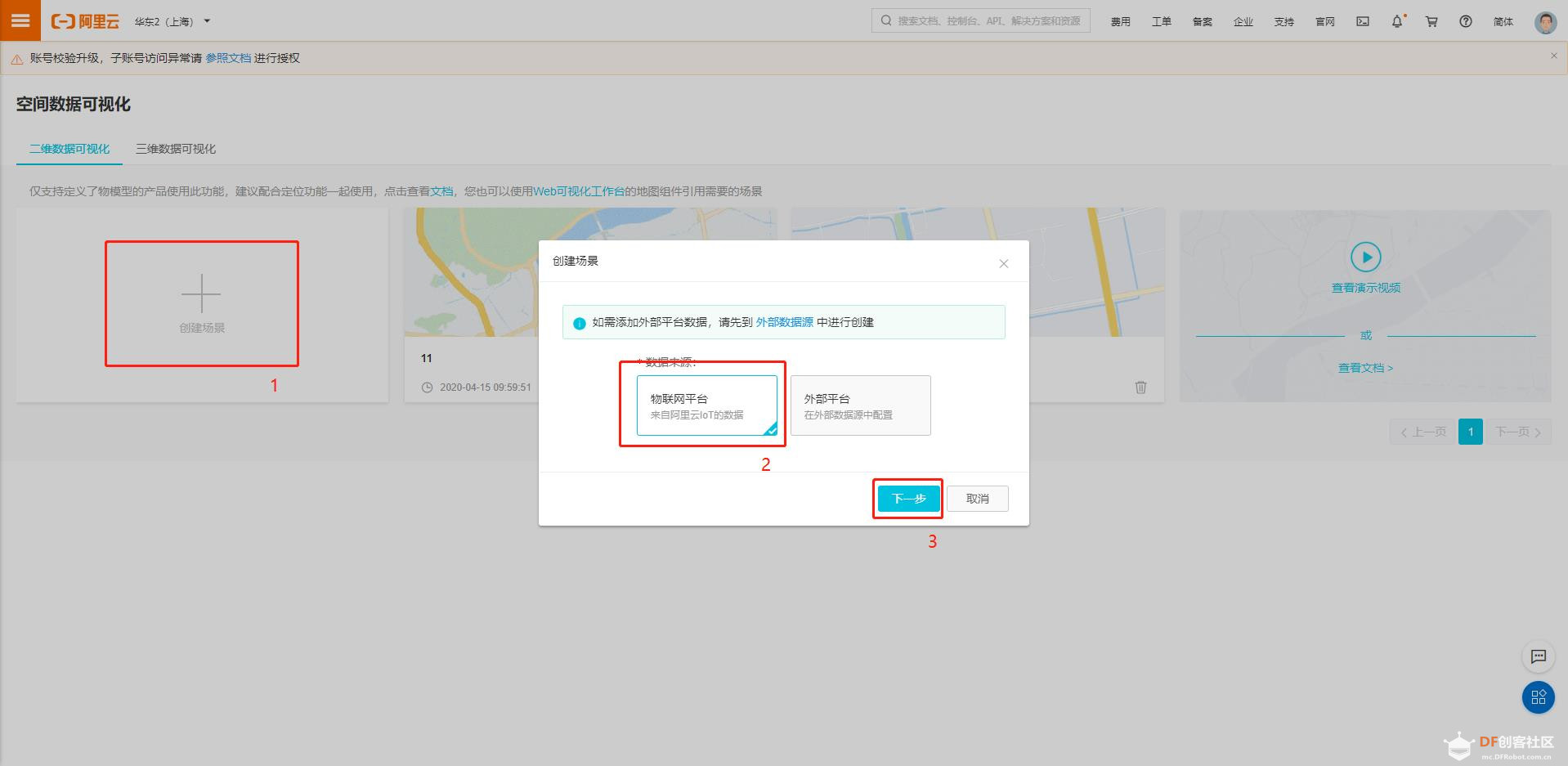 接下来,场景名称填写为“车载GPS”,目标产品选择之前创建的“GPS追踪器”产品,如下图所示。  点击确定后,会自动进入空间数据可视化界面。在做左上角选择对应的设备,既可以看到实时的GPS定位信息,如下图所示。 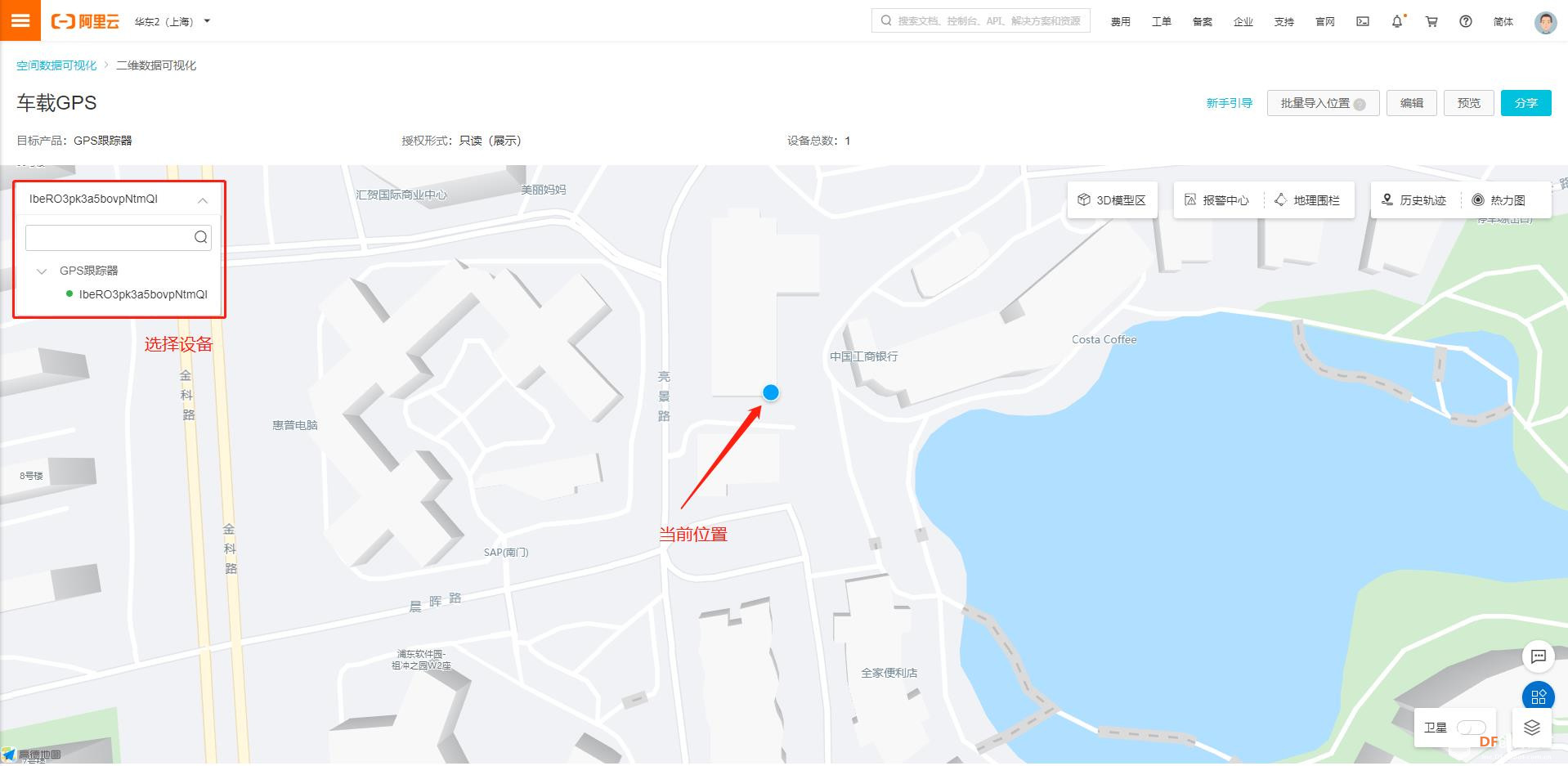 为了测试阿里云平台的历史轨迹信息,我将GPS追踪器安装在了汽车上。在出去跑了一圈之后,再打开可视化页面。点击右上角的历史轨迹,选择对应的时间段和设备,选择“平滑轨迹线”,云平台会将轨迹点同步到对应的道路上。 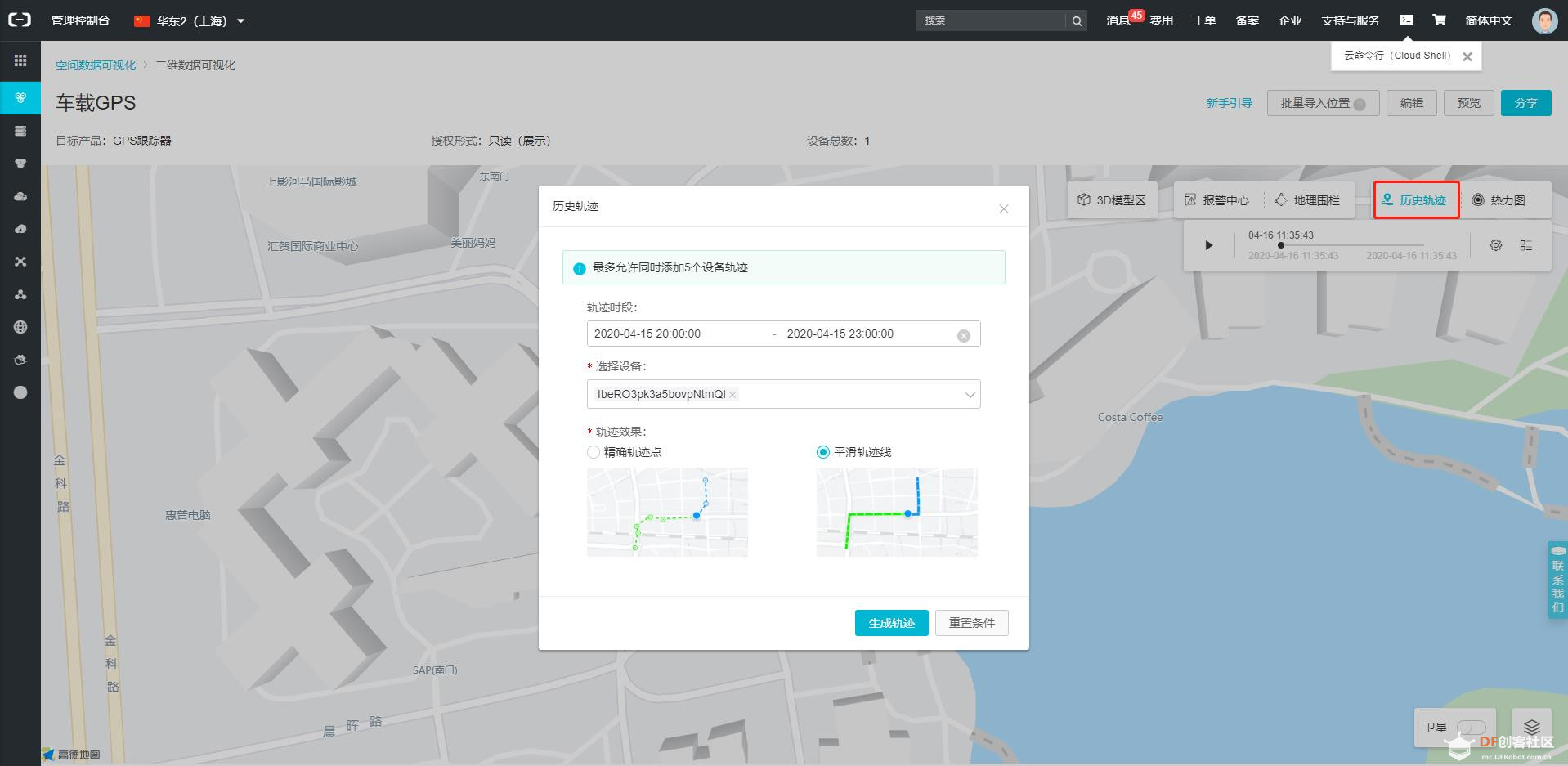 配置完成后就可以看到选择时间段的历史轨迹,点击右上角的播放箭头,即可观看轨迹动图。  |

2.27 KB, 下载次数: 11488
|
有个重要信息,向dfrobot报告下。 阿里云现在1分钟限制5次连接,连接过于频繁会被阿里云重置。 而例程里面的代码: myBC20.getCLK(); // Get CLK from BC20 myBC20.getQGNSSRD(); myBC20.loop(); myBC20.publish(pubTopic, ("{\"id\":"+ClientId+",\"params\":{\""+Identifier+"\":{\"value\":{\"Longitude\":"+String(sGGNS.LongitudeVal,6)+",\"Latitude\":"+String(sGGNS.LatitudeVal,6)+",\"Altitude\":"+String(sGGNS.Altitude,6)+",\"CoordinateSystem\":"+(String)2+"}}},\"method\":\"thing.event.property.post\" }")); Serial.println("Data is published to cloud."); delay(10000); 是默认10000ms的,建议改到12000ms以上。 否则只会间歇性在线。 |
|
代码编译后显示这个错误,咋回事呢 F:\BaiduNetdiskDownload\sketch_apr05a\NB_Prj4.ino: In function 'void setup()': NB_Prj4:37:6: error: redefinition of 'void setup()' void setup(){ ^ F:\BaiduNetdiskDownload\sketch_apr05a\sketch_apr05a.ino:1:6: note: 'void setup()' previously defined here void setup() { ^ F:\BaiduNetdiskDownload\sketch_apr05a\NB_Prj4.ino: In function 'void loop()': NB_Prj4:67:6: error: redefinition of 'void loop()' void loop(){ ^ F:\BaiduNetdiskDownload\sketch_apr05a\sketch_apr05a.ino:6:6: note: 'void loop()' previously defined here void loop() { ^ exit status 1 redefinition of 'void setup()' |
|
每过一段时间,设备被踢,日志显示如下内容。 {"Content":"offline, lastActiveTime=1602816601849","Reason":"Keepalive timeout after 120sec, ip:36.113.19.208","clientId":"Tinker_A"} 阿里云的回答是: 超过保活时间,设备没有发心跳包给云端,云端判定设备下线了 Keep Alive Connect指令中需包含Keep Alive(保活时间)。保活心跳时间取值范围为30至1200秒。 如果心跳时间不在此区间内,物联网平台会拒绝连接。建议取值300秒以上。如果网络不稳定,将心跳时间设置高一些。 这个需要在连接段设置。 请问,代码段要做哪些设置呢? |
506798599 发表于 2020-4-25 02:19 可以找商城的客服问一下,有可能是所在地区没有NB-IoT信号 |
幻想家 发表于 2020-4-25 10:49 这一部分可以参考第一期里面对应的内容,https://mc.dfrobot.com.cn/thread-303693-1-1.html |
幻想家 发表于 2020-4-28 08:16 未激活是因为设备还没有第一次连接至云平台,设备初次连接至云平台后,即可自动激活 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










