|
20965| 37
|
[MP动手做] MicroPython动手做(24)——掌控板之拓展掌控宝 |
|
5、按键控制小车前进、后退与旋转 #MicroPython动手做(24)——掌控板之拓展掌控宝 #按键控制小车前进、后退与旋转 [mw_shl_code=python,false]#MicroPython动手做(24)——掌控板之拓展掌控宝 #按键控制小车前进、后退与旋转 import parrot from mpython import * def forward(): parrot.set_speed(parrot.MOTOR_1, 80) parrot.set_speed(parrot.MOTOR_2, 80) oled.fill(0) oled.blit(image_picture.load('face/Information/Forward.pbm', 0), 32, 0) oled.show() def retreat(): parrot.set_speed(parrot.MOTOR_1, -80) parrot.set_speed(parrot.MOTOR_2, -80) oled.fill(0) oled.blit(image_picture.load('face/Information/Backward.pbm', 0), 32, 0) oled.show() def right(): parrot.set_speed(parrot.MOTOR_1, 80) parrot.set_speed(parrot.MOTOR_2, -80) oled.fill(0) oled.blit(image_picture.load('face/Information/Right.pbm', 0), 32, 0) oled.show() import time def on_button_a_down(_): global aaa time.sleep_ms(10) if button_a.value() == 1: return rgb.fill((int(0), int(102), int(0))) rgb.write() time.sleep_ms(1) forward() time.sleep(2) Left() time.sleep(1) retreat() time.sleep(2) right() time.sleep(1) oled.fill(0) parrot.set_speed(parrot.MOTOR_1, 0) parrot.set_speed(parrot.MOTOR_2, 0) rgb.fill( (0, 0, 0) ) rgb.write() time.sleep_ms(1) oled.show() def Left(): parrot.set_speed(parrot.MOTOR_1, -80) parrot.set_speed(parrot.MOTOR_2, 80) oled.fill(0) oled.blit(image_picture.load('face/Information/Left.pbm', 0), 32, 0) oled.show() image_picture = Image() button_a.irq(trigger=Pin.IRQ_FALLING, handler=on_button_a_down)[/mw_shl_code] |
|
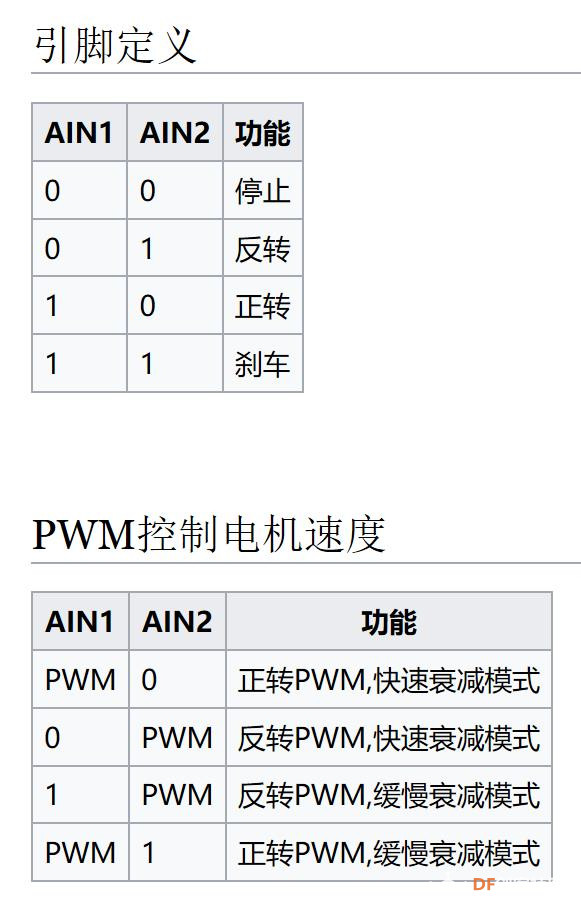
3、拓展掌控宝驱动电机函数 拓展板支持2路的PWM电机驱动,可以使用直流电机马达,如TT马达、N20等。 (1)首先导入parrot模块: import parrot (2)M1、M2,正转速度设为80: import parrot # 导入parrot 模块 parrot.set_speed(parrot.MOTOR_1,80) # 设置M1正转,速度为80 parrot.set_speed(parrot.MOTOR_2,80) # 设置M2正转,速度为80 (3)反转: parrot.set_speed(parrot.MOTOR_1,-80) # 设置M1反转,速度为80 parrot.set_speed(parrot.MOTOR_2,-80) # 设置M2反转,速度为80 (4)停止: parrot.set_speed(parrot.MOTOR_1,0) # 停止 parrot.set_speed(parrot.MOTOR_2,0) # 停止 控制电机速度使用到函数 set_speed(motor_no, speed) 。motor_no 参数为电机编号,可选编号常量有 MOTOR_1 、MOTOR_2 。 speed 参数为速度,范围-100~100,正值表示正转,负值时表示负转。 当某些时候需要知道当前设置的速度值时,你可以用 get_speed(motor_no) 返回当前电机速度。 |
|
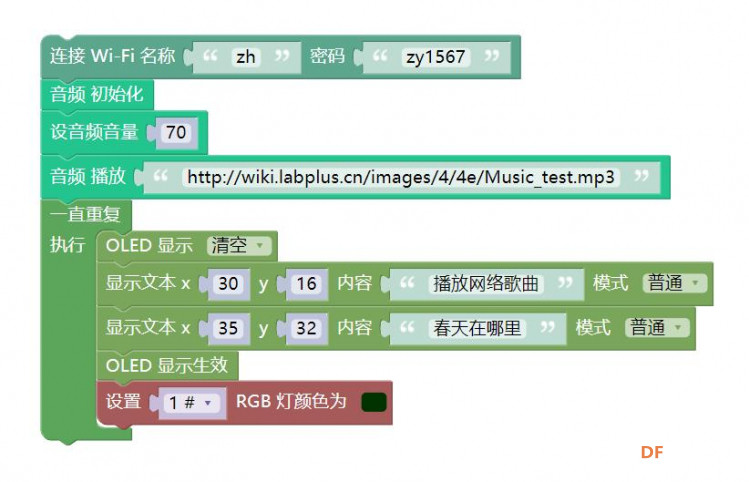
1、通过音频模块播放网络歌曲 #MicroPython动手做(24)——掌控板之拓展掌控宝 #通过音频模块播放网络歌曲(掌控宝内置喇叭) [mw_shl_code=applescript,false]#MicroPython动手做(24)——掌控板之拓展掌控宝 #通过音频模块播放网络歌曲(掌控宝内置喇叭) from mpython import * import network import audio import time my_wifi = wifi() my_wifi.connectWiFi("zh", "zy1567") audio.player_init() audio.set_volume(70) audio.play("http://wiki.labplus.cn/images/4/4e/Music_test.mp3") while True: oled.fill(0) oled.DispChar("播放网络歌曲", 30, 16, 1) oled.DispChar("春天在哪里", 35, 32, 1) oled.show() rgb[1] = (int(0), int(51), int(0)) rgb.write() time.sleep_ms(1)[/mw_shl_code] 播放网络音频 要播放网络上mp3音频文件,需要知道音频的URL地址。目前,大部分的音乐网受版权保护,并不直接提供音乐的URL,你可以通过一些插件爬取音频的URL地址。 注解 掌控板需要确保连接网络通畅。URL必须是完整的网络地址,否则无法解析。音频解码功能使用到 audio 模块的 audio.play(url) 函数, url 参数可以为音源的本地文件系统的路径或网络URL地址。 |
|
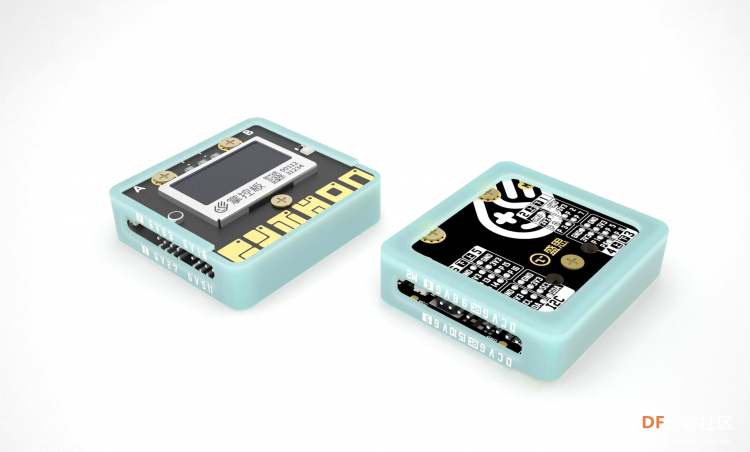
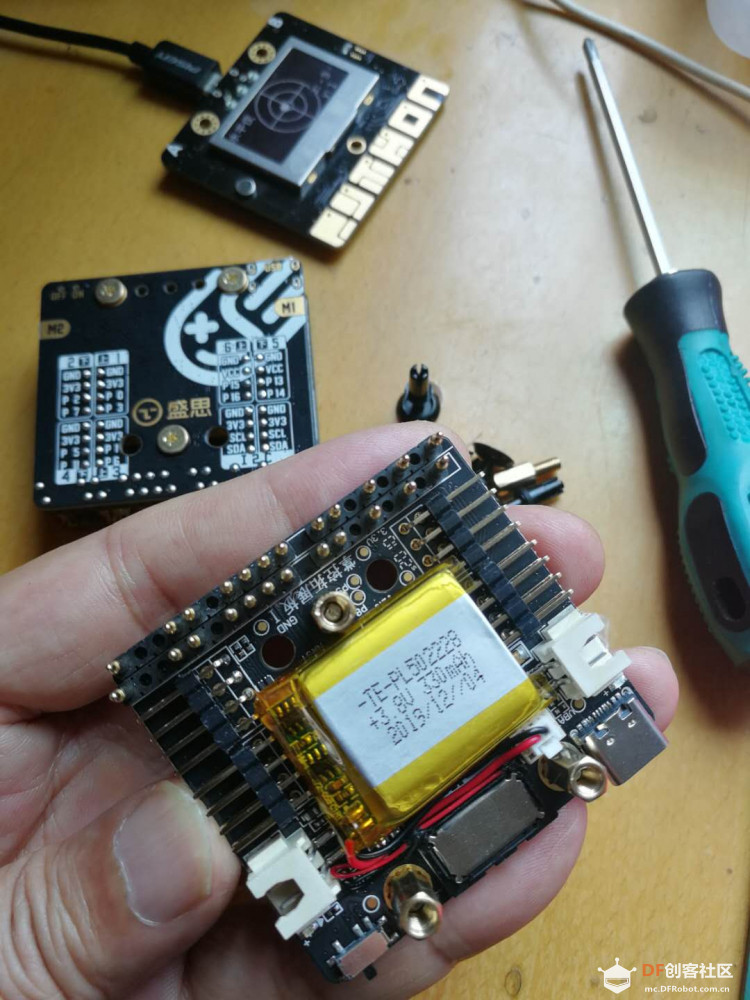
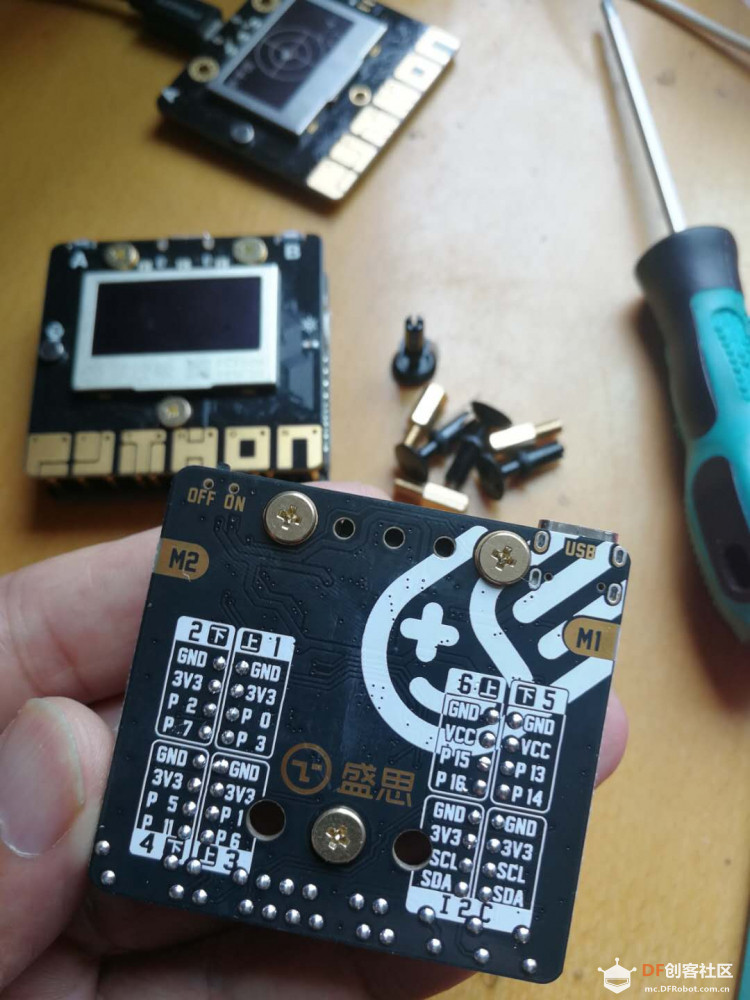
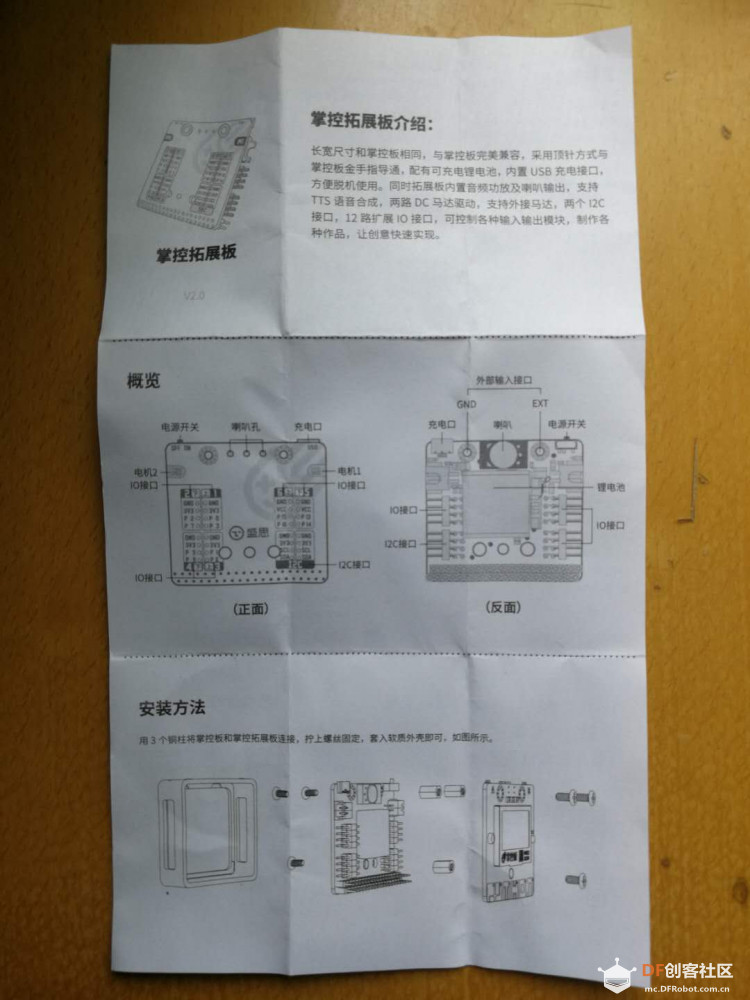
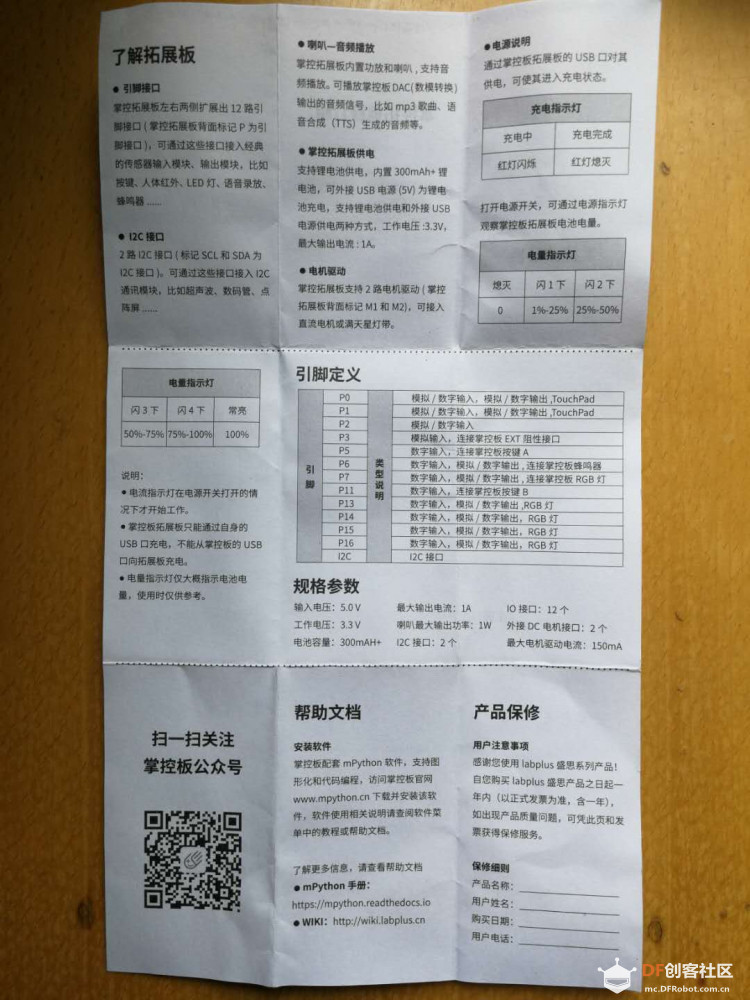
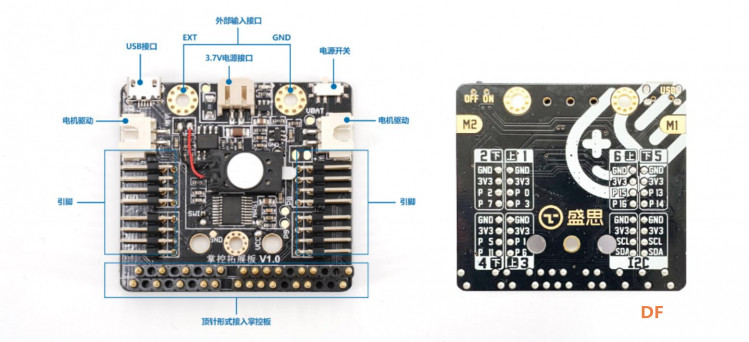
电源指示灯状态: v1版本 电源输出指示功能: 3.3V输出,指示灯亮;无输出则灭。 v2版本 电源输出指示功能: 3.3V输出,指示灯亮;无输出则灭。 电池电量指示功能: 通过闪烁次数反馈电量,4档电量显示。 充电指示灯状态: v1版本 注意:只能在电源开关打开下,才能指示充电放电状态。 充电指示功能: 充电中,指示灯亮;充满,指示灯熄灭; 放电指示功能: 通过指示灯闪烁次数来反馈电池电量。频率越快电量越低,电量满时,常亮。 v2版本 充电指示功能: 充电中,指示灯闪烁;充满,指示灯熄灭; VCC: VCC电源区别与其他3.3V电压电源。提供3.3V以上更高的电压和更大的电流驱动。用于应付较大的驱动需求。电源路径管理,当没接USB充电时,VCC由电池电压直接提供;接上USB充电时,VCC由USB提供电源。 安装说明 掌控板和掌控拓展板都有3个孔,通过3个铜柱将两板连接连接,拧上螺丝固定,套入软质外壳即可,如图所示。 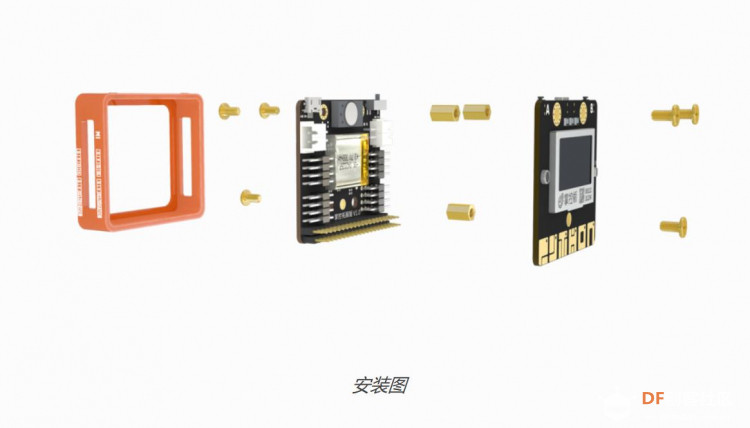 |
|
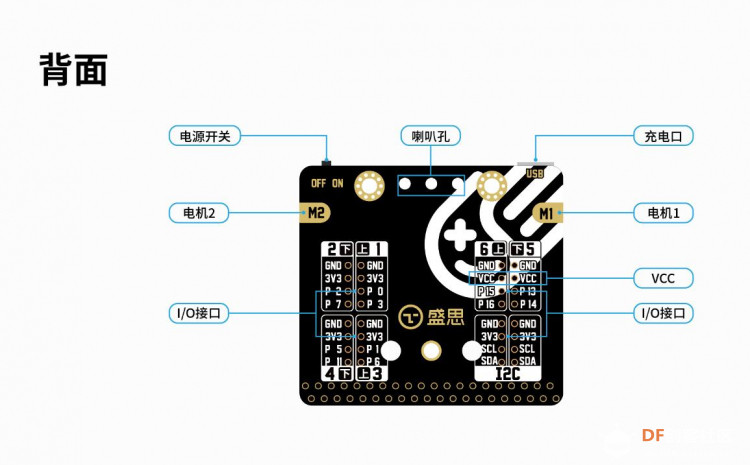
掌控宝功能说明
电机驱动 掌控拓展板支持2路的PWM电机驱动(掌控拓展板背面标记M1和M2),你可以接入直流电机马达(如TT马达、N20)和LED灯(满天星灯带)
I/O 掌控拓展板左右两侧扩展出12路I/O接口、2路I2C接口。可以通过这些接口接入经典的传感器输入模块,输出模块。例如:按键、人体红外、超声波、LED、马达、蜂鸣器、数码管...... 拓展板扩展引脚有P0、P1、P2、P3、P5、P6、P7、P11、P13、P14、P15、P16、P19(SCL)、P20(SDA) 重要 由于P5、P11是掌控板的按键A、B的IO引脚,为避免冲突,限定拓展板的P5、P11引脚只能用于数字电平输入,且拓展板会对输入电平进行翻转。在使用时,须重点注意!
喇叭—音频播放 掌控拓展板内置喇叭,支持音频播放。
语音合成(TTS) 将文本转化为文字,让机器能够说话。这样就可以给掌控板添上“嘴巴”。比如在程序内输入你想要说话的内容,让它说给你听。
Python库 parrot 模块 : 用于电机驱动功能 audio 模块 : 用于音频播放功能 |
|
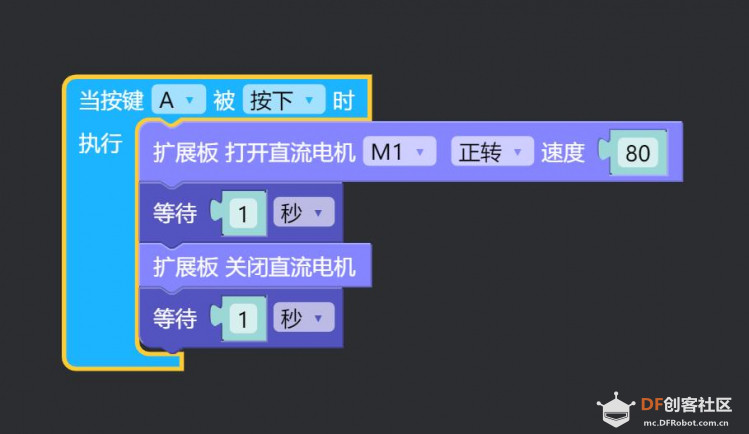
#MicroPython动手做(24)——掌控板之拓展掌控宝 #按键控制TT电机 [mw_shl_code=python,false]#MicroPython动手做(24)——掌控板之拓展掌控宝 #按键控制TT电机 from mpython import * import time import parrot def on_button_a_down(_): global aaa time.sleep_ms(10) if button_a.value() == 1: return parrot.set_speed(parrot.MOTOR_1, 80) time.sleep(1) parrot.set_speed(parrot.MOTOR_1, 0) parrot.set_speed(parrot.MOTOR_2, 0) time.sleep(1) button_a.irq(trigger=Pin.IRQ_FALLING, handler=on_button_a_down) [/mw_shl_code] |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 淘宝上能搜到的
淘宝上能搜到的

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






