|
35446| 5
|
[知识点] 机器人大赛传感器系统及其选型(循迹、颜色、测距) |

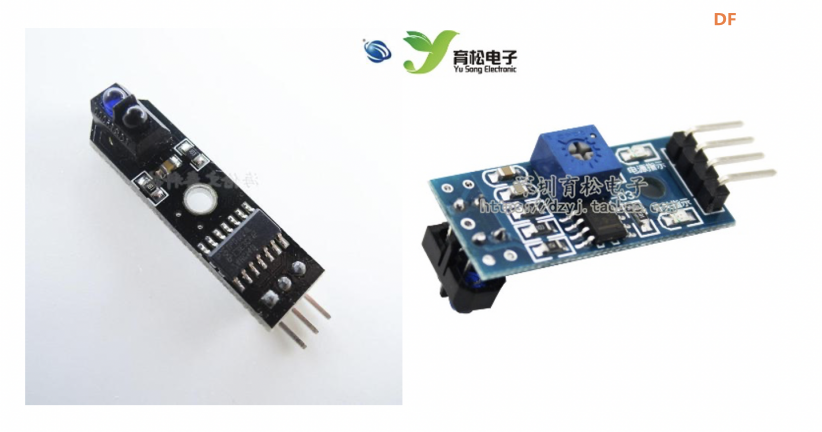
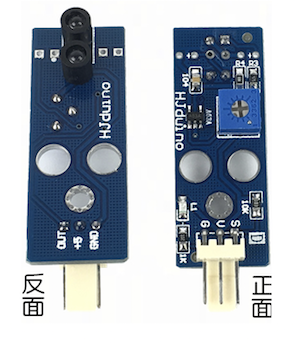
机 器 人 大赛传感器系统及其选型(循迹、颜色、测距)这次传感器选型主要介绍循迹/灰度传感器、颜色传感器及各种测距传感器。 循迹/灰度传感器循迹/灰度传感器(以下简称灰度)是通过检测场地灰度,进而识别场地迹线进行循迹的传感器。这是一种主动型传感器,一个探头发射红外光或可见光,另一个探头进行接收,通过探头接收到的光线强度来判断场地反射率,也即灰度。
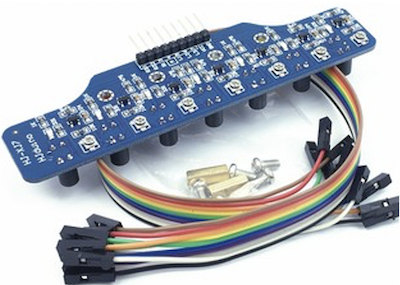
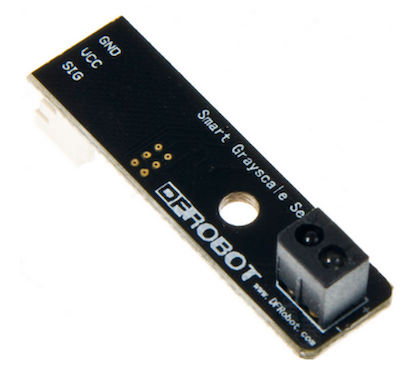
还有一些灰度传感器,使用了可见光探头,价格稍贵。工作时,作为TX的LED灯泡发出强烈的白光,使得它拥有较好的抗干扰能力和分辨率。这类产品较多,随便配一款的图片了: 另外,市面上还有多路循迹传感器出售。此处建议使用可见光灰度传感器,并且各个探头的灵敏度可以单独调节的型号,比如下图这款。切记,采用TCR T5000探头的多路循迹传感器一般是无法使用的,除非各个探头有单独的灵敏度调节功能。 顺带一提我自己使用的灰度。我自己使用的是DFRobot出品的“智能灰度传感器”,价格30rmb,优点是体积小(宽度10mm),并且可以半自动地调节灵敏度。缺点是价格昂贵,灵敏度调节范围稍小。s 颜色传感器颜色传感器也是一种主动传感器,通过对近距离(2cm以内)的物体发射白色光线,分别接收检测反射光中的R、G、B色光光强来判断物体颜色的。在此推荐使用两款颜色传感器,均是我本人使用过的型号。分别是左边的GY-31/TCS3200颜色传感器和右边的GY-33颜色传感器 不建议使用任何没有遮光罩的颜色传感器。 测距传感器测距传感器的类型多种多样,原理主要包括三角测距法和时间测距法。 最常见的是超声测距传感器,采用时间测距法,谁用谁知道有多坑,不建议使用。 另外一种可以可靠运行的就是采用三角测距的“红外测距传感器”,基本全部由夏普公司出品,模拟信号输出,有多种规格,使用方便,在武术擂台赛上的应用极其广泛。其基本原理是发射一束红外激光,然后一个红外摄像头对其进行追踪,根据光点在摄像头视野中的位置判断距离,所以这是一种点测距(红外激光光点)式测距传感器。淘宝有授权的代理店铺“SHARP夏普店”进行全系列销售。
相关文章跳转: 机器人大赛动力系统及其选型(电源篇) 机器人大赛传感器系统及其选型(旋转编码器专篇) 机器人大赛传感器系统及其选型(循迹、颜色、测距) 机器人大赛动力系统及其选型(执行机构篇)(上) 机器人大赛动力系统及其选型(执行机构篇)(中) 机器人大赛动力系统及其选型(执行机构篇)(下) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed





 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






