本帖最后由 云天 于 2023-10-1 13:23 编辑
【项目背景】
最近在DF商城发现一款主板Arduino Nano ESP32开发板, Arduino Nano ESP32: 小巧便携,功能强大。集成了Arduino和ESP32的优势,支持WiFi和蓝牙通信,适用于物联网和智能设备开发,Arduino Nano ESP32将Arduino品牌的易用性和支持与ESP32-S3的强大功能。
个人认为设备特点:1.输入标准电压:5~18V DC。2.USB连接:USB-C。3.支持WiFi和低功耗蓝牙
【项目设计】
1.本体感遥控车,通过Arduino Nano ESP32的低功耗蓝牙实现与手机APP进行无线连接通信。
2.Arduino Nano ESP32主控编程使用Arduino IDE。
3.手机APP编写使用WxBit的App Inventor2图形化编程。
4.电机使用“金属齿轮减速电机 减速比30:1”
5.电机驱动模块使用“微型双路1.5A直流电机驱动模块”
6.供电电源使用2个9V无汞电池。
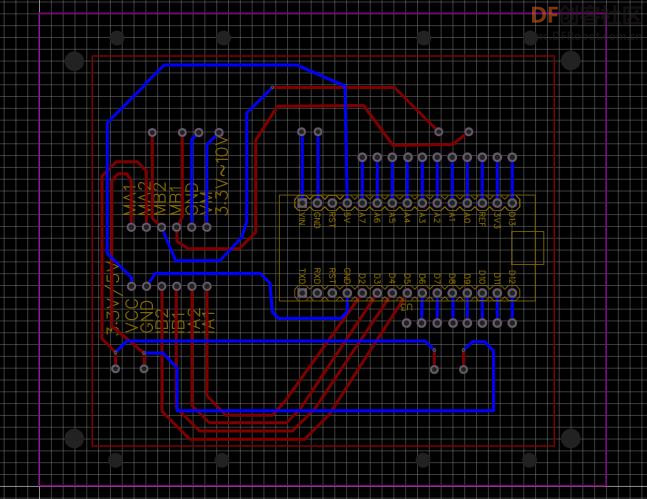
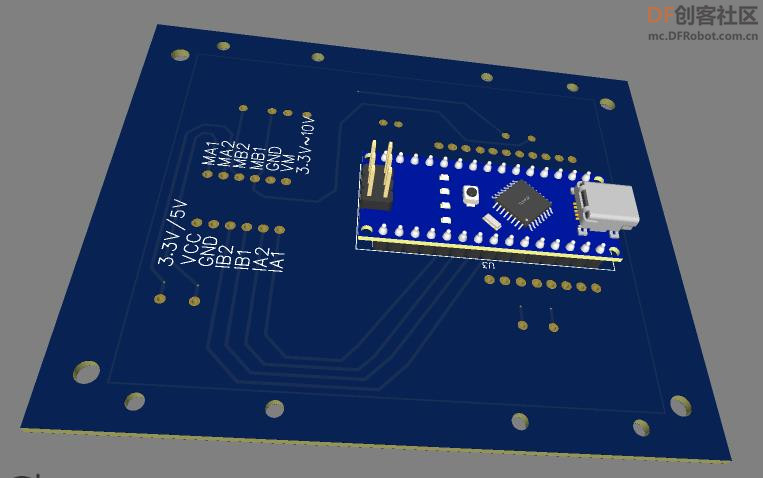
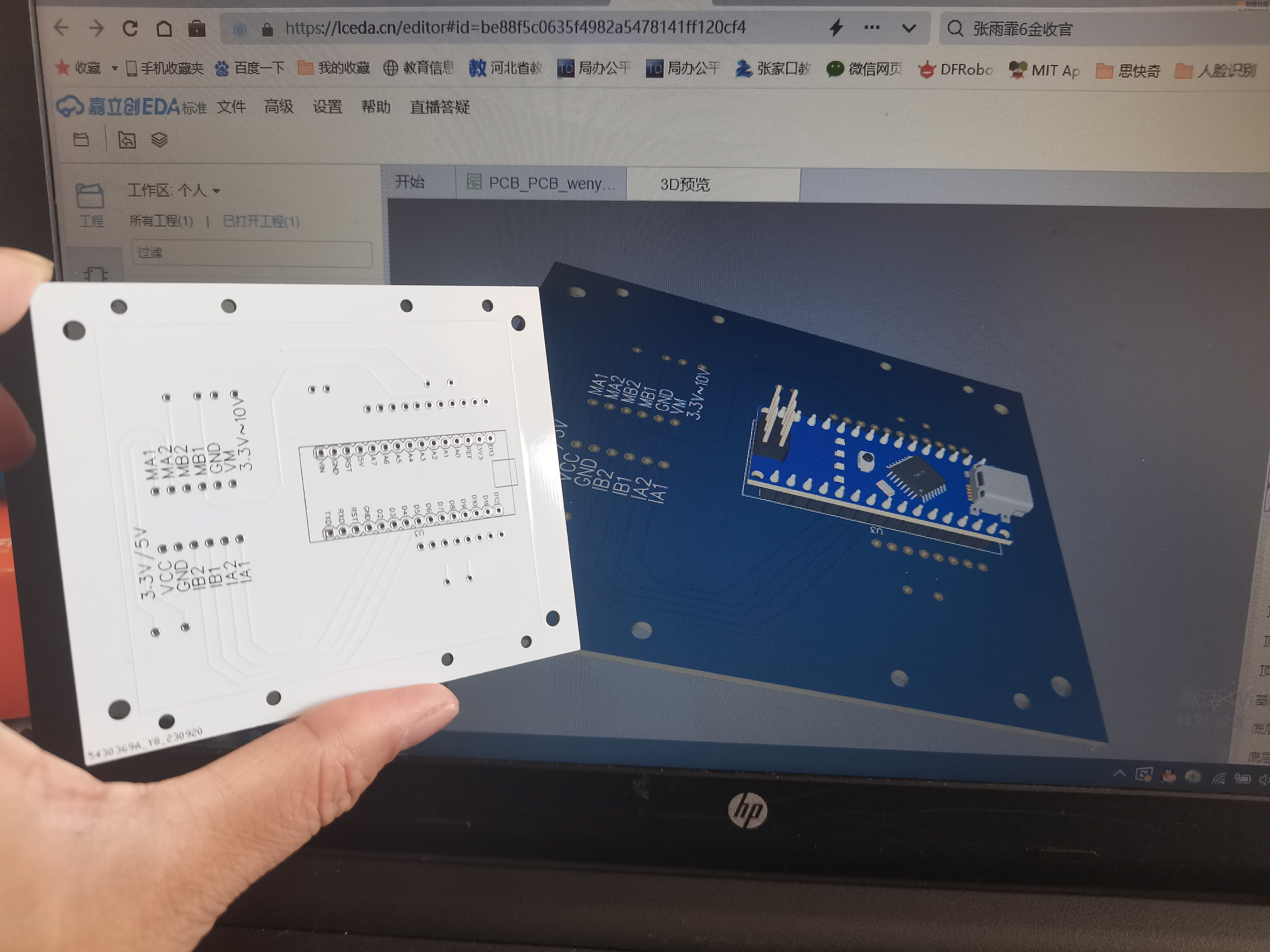
7.电路板使用嘉立创免费打板。
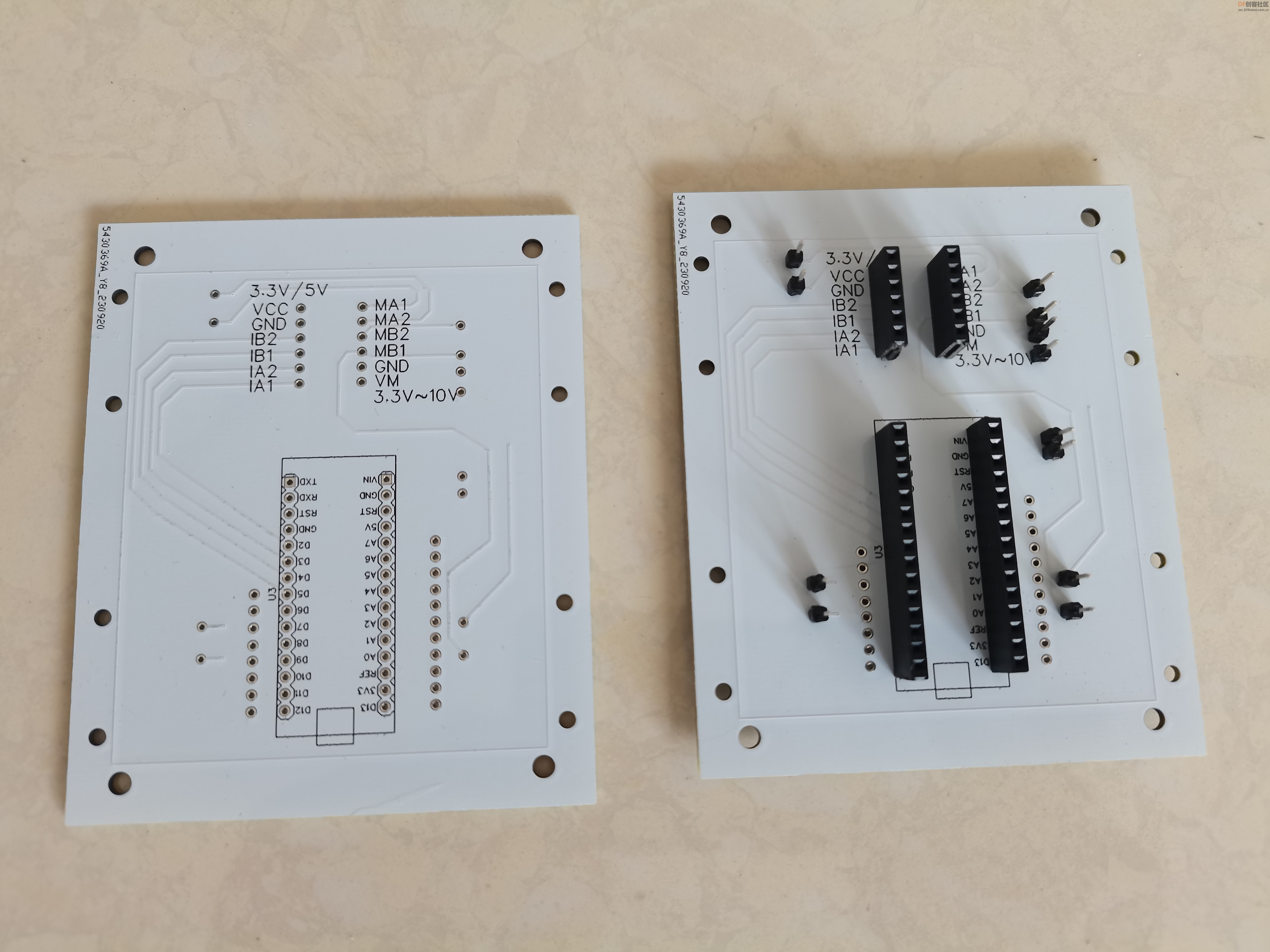
【电路板】
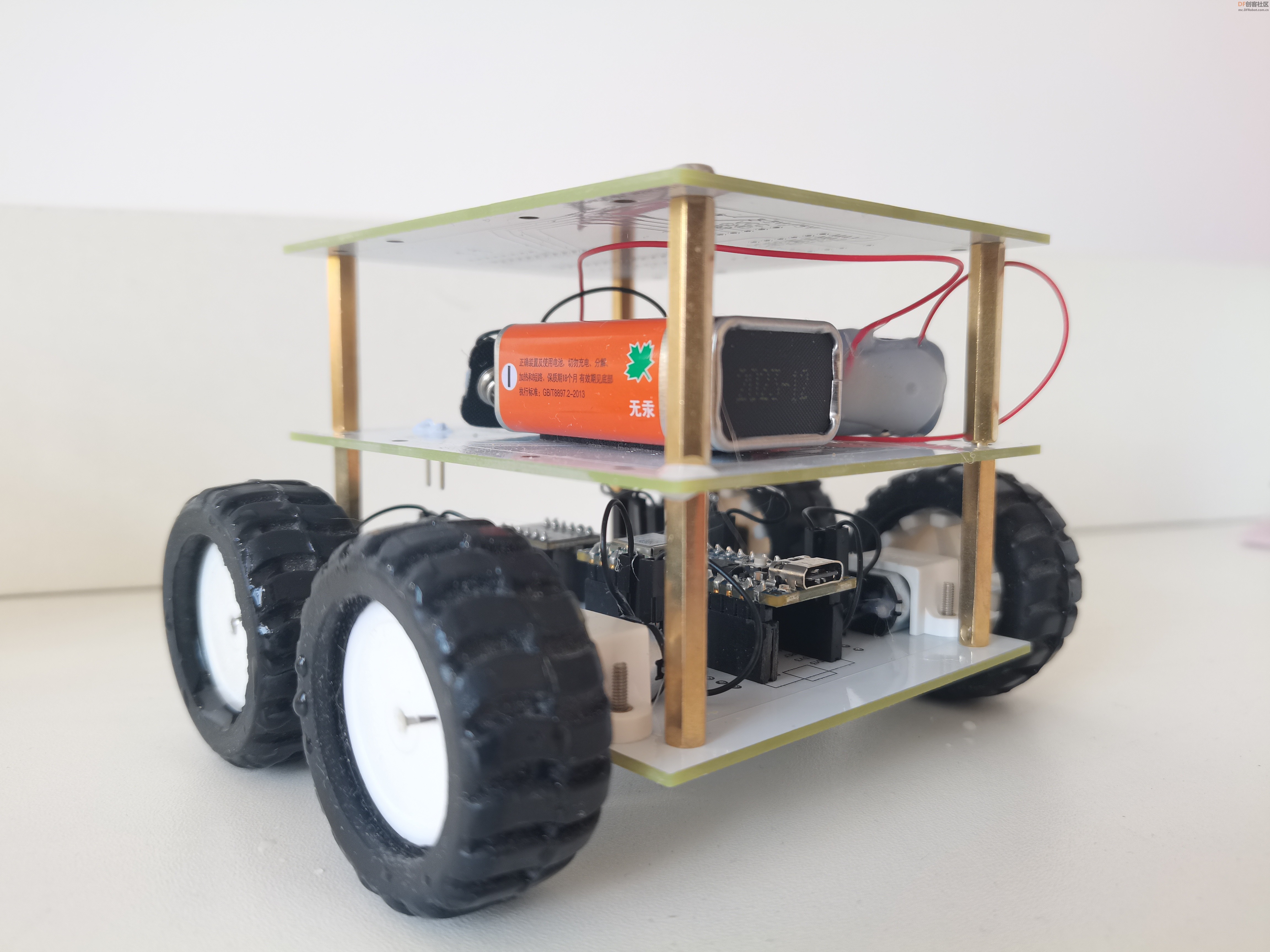
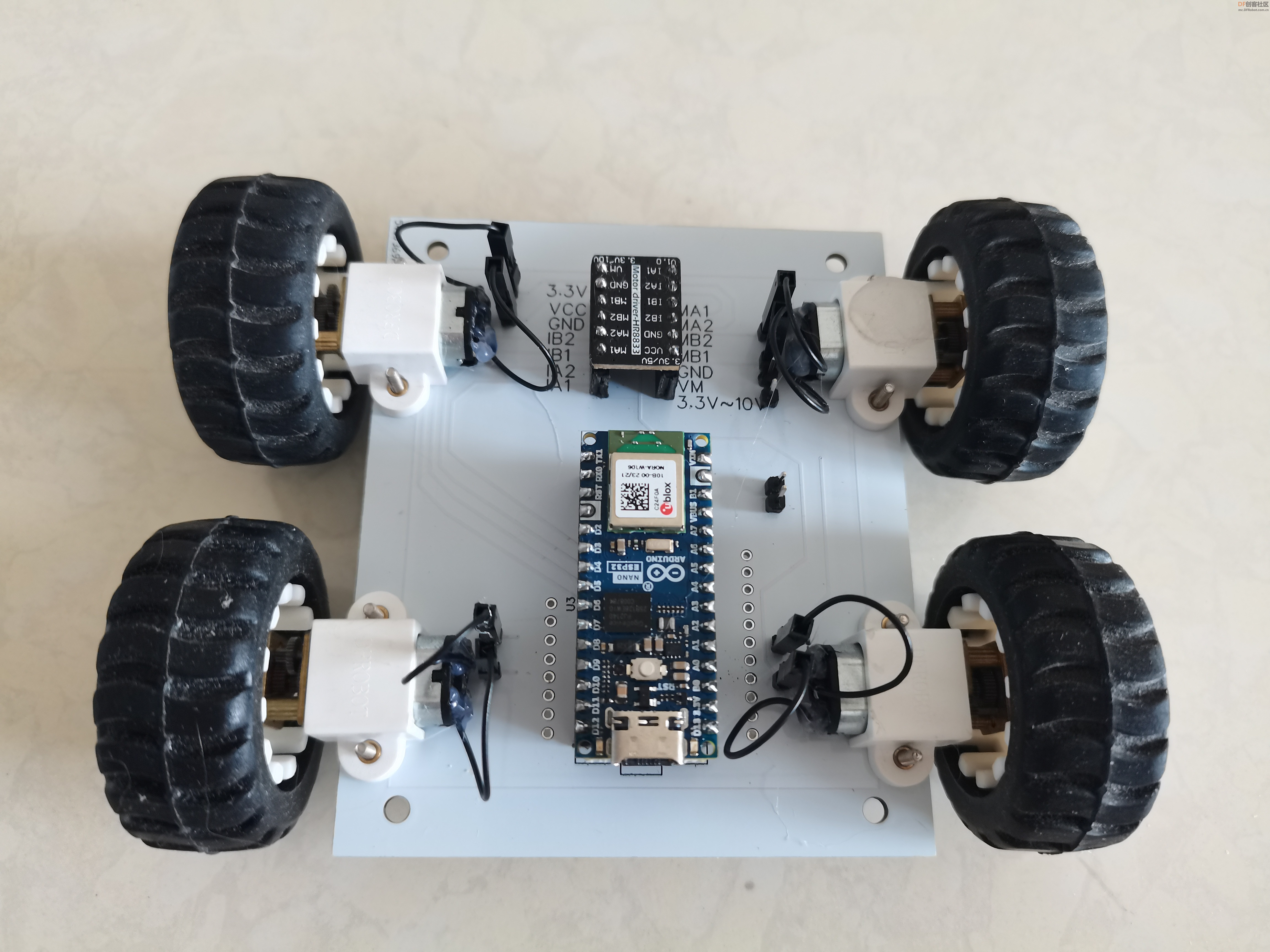
【硬件组装】
1.焊接电机、电源排针,主控排母
2.焊接电机杜邦线
3.安装主控、电机驱动模块、电机
4.安装电源
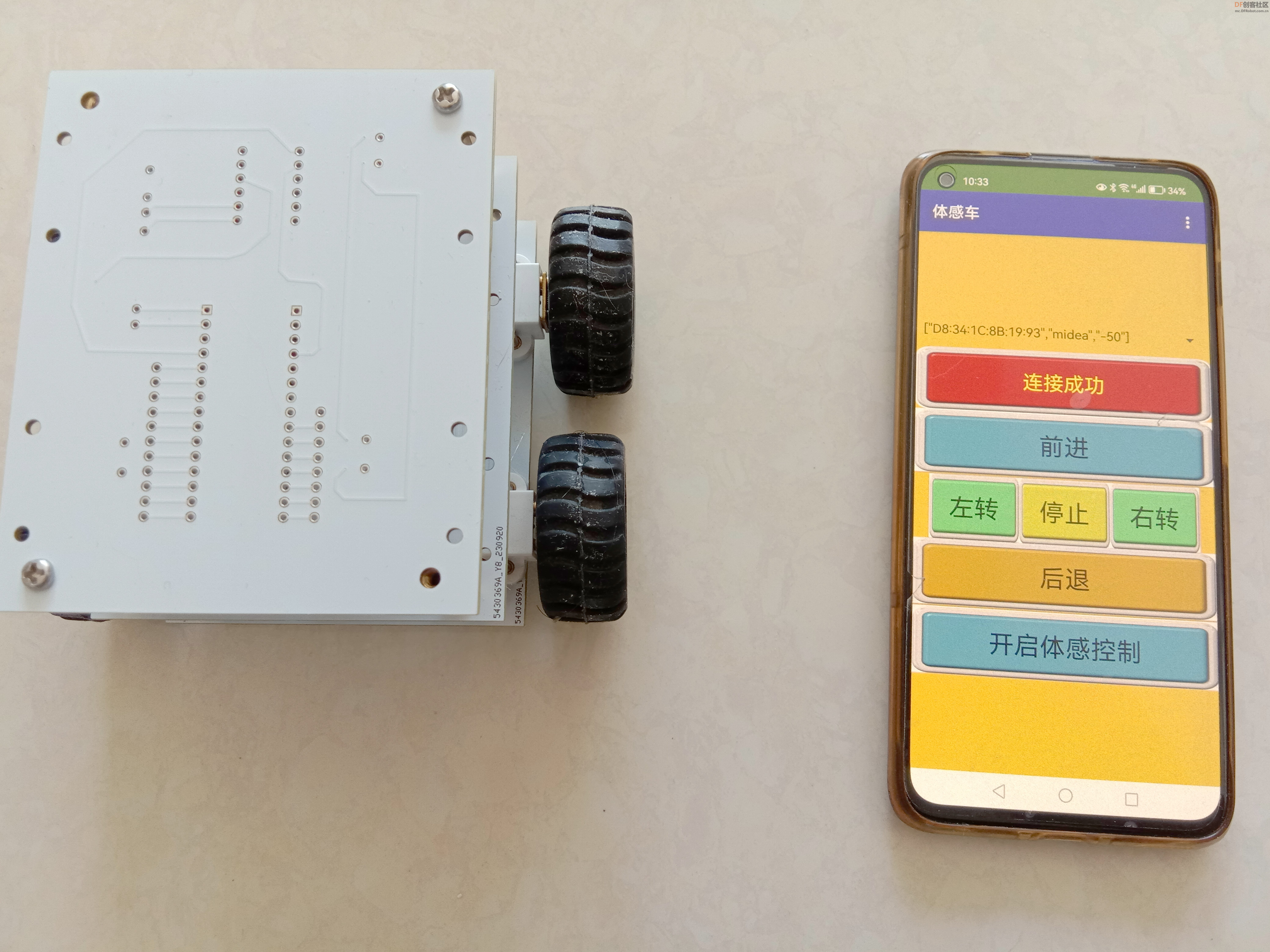
【编写手机APP】
1.界面设计
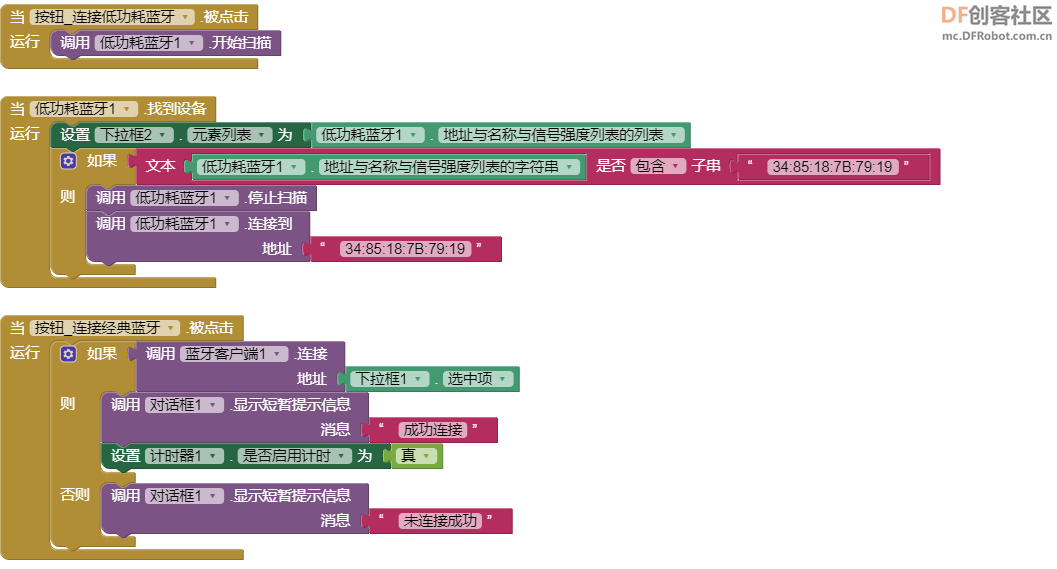
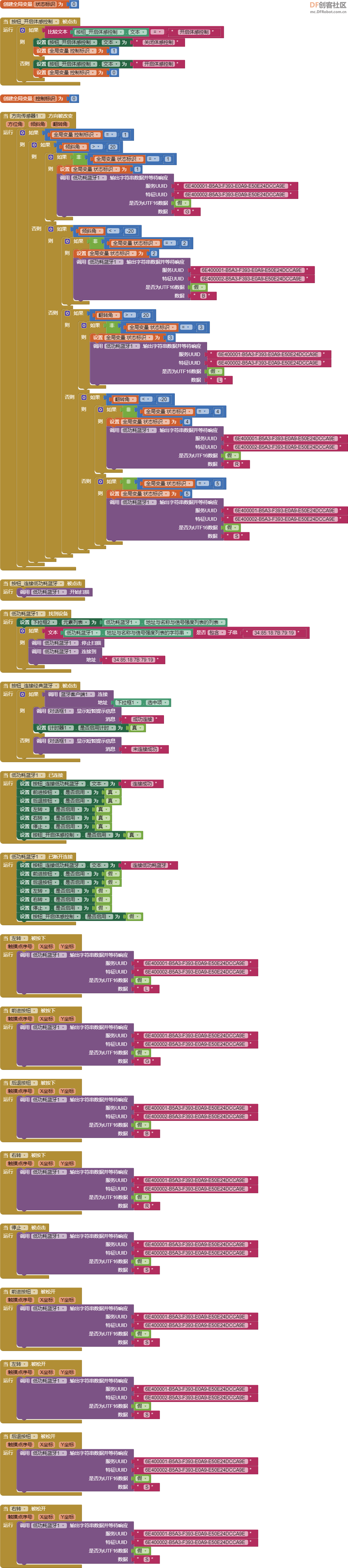
2.逻辑设计
首先通过蓝牙扫描,找到名称为“UART Service”(Arduino IDE编程设置)的蓝牙地址。找到后修改程序——蓝牙扫描找到设备后对蓝牙地址进行检查,如匹配进行连接。
发送数据时,填写服务UUID及特征UUID(Arduino IDE编程设置)
完整程序
【Arduino Nano ESP32主控编程】
1.测试电机驱动模块,确定电机转动方向
-
- void setup() {
- // initialize digital pin LED_BUILTIN as an output.
- pinMode(LED_BUILTIN, OUTPUT);
- pinMode(D2, OUTPUT);
- pinMode(D3, OUTPUT);
- pinMode(D4, OUTPUT);
- pinMode(D5, OUTPUT);
- }
-
- // the loop function runs over and over again forever
- void loop() {
- //正转
- digitalWrite(D2,LOW);
- analogWrite(D3, 50);
- digitalWrite(D5,LOW);
- analogWrite(D4, 50);
- delay(5000);
-
- digitalWrite(D2,LOW);
- analogWrite(D3, 0);
- digitalWrite(D5,LOW);
- analogWrite(D4, 0);
- delay(5000);
-
- //反转
- digitalWrite(D3,LOW);
- analogWrite(D2, 50);
- digitalWrite(D4,LOW);
- analogWrite(D5, 50);
- delay(5000);
- digitalWrite(D3,LOW);
- analogWrite(D2, 0);
- digitalWrite(D4,LOW);
- analogWrite(D5, 0);
- delay(5000);
- }
2.蓝牙连接测试
复制代码
3.蓝牙连接与电机控制结合(完整程序)
-
-
- #include <BLEDevice.h>
- #include <BLEServer.h>
- #include <BLEUtils.h>
- #include <BLE2902.h>
-
- BLEServer *pServer = NULL;
- BLECharacteristic * pTxCharacteristic;
- bool deviceConnected = false;
- bool oldDeviceConnected = false;
- uint8_t txValue = 0;
- uint8_t bs = 0;
- // See the following for generating UUIDs:
- // [url]https://www.uuidgenerator.net/[/url]
-
- #define SERVICE_UUID "6E400001-B5A3-F393-E0A9-E50E24DCCA9E" // UART service UUID
- #define CHARACTERISTIC_UUID_RX "6E400002-B5A3-F393-E0A9-E50E24DCCA9E"
- #define CHARACTERISTIC_UUID_TX "6E400003-B5A3-F393-E0A9-E50E24DCCA9E"
-
-
- class MyServerCallbacks: public BLEServerCallbacks {
- void onConnect(BLEServer* pServer) {
- deviceConnected = true;
- };
-
- void onDisconnect(BLEServer* pServer) {
- deviceConnected = false;
- }
- };
-
- class MyCallbacks: public BLECharacteristicCallbacks {
- void onWrite(BLECharacteristic *pCharacteristic) {
- std::string rxValue = pCharacteristic->getValue();
- int speed=80;
- if (rxValue.length() > 0) {
- if (rxValue[0]=='G'){
- bs=1;
- GO(speed);
- }
- if (rxValue[0]=='L'){
- bs=1;
- LEFT(speed);
- }
- if (rxValue[0]=='R'){
- bs=1;
- RIGHT(speed);
- }
- if (rxValue[0]=='B'){
- bs=2;
- BACK(speed);
- }
- if (rxValue[0]=='S'){
- if(bs==1){
- STOPG();
- }
- if(bs==2){
- STOPB();
- }
- }
- }
- };
- void GO(int speed){
- //正转
- digitalWrite(D2,LOW);
- analogWrite(D3, speed);
- digitalWrite(D5,LOW);
- analogWrite(D4, speed+50);
- };
- void LEFT(int speed){
- //左转
- digitalWrite(D2,LOW);
- analogWrite(D3, speed);
- digitalWrite(D5,LOW);
- analogWrite(D4, 0);
- };
- void RIGHT(int speed){
- //右转
- digitalWrite(D2,LOW);
- analogWrite(D3, 0);
- digitalWrite(D5,LOW);
- analogWrite(D4, speed);
- };
- void BACK(int speed){
- //反转
- digitalWrite(D3,LOW);
- analogWrite(D2, speed);
- digitalWrite(D4,LOW);
- analogWrite(D5, speed+50);
- };
-
- void STOPG(){
- //停止前进
- digitalWrite(D2,LOW);
- analogWrite(D3, 0);
- digitalWrite(D5,LOW);
- analogWrite(D4, 0);
- };
- void STOPB(){
- //停止后退
- digitalWrite(D3,LOW);
- analogWrite(D2, 0);
- digitalWrite(D4,LOW);
- analogWrite(D5, 0);
- };
- };
-
-
- void setup() {
- Serial.begin(115200);
-
- // Create the BLE Device
- BLEDevice::init("UART Service");
-
- // Create the BLE Server
- pServer = BLEDevice::createServer();
- pServer->setCallbacks(new MyServerCallbacks());
-
- // Create the BLE Service
- BLEService *pService = pServer->createService(SERVICE_UUID);
-
- // Create a BLE Characteristic
- pTxCharacteristic = pService->createCharacteristic(
- CHARACTERISTIC_UUID_TX,
- BLECharacteristic::PROPERTY_NOTIFY
- );
-
- pTxCharacteristic->addDescriptor(new BLE2902());
-
- BLECharacteristic * pRxCharacteristic = pService->createCharacteristic(
- CHARACTERISTIC_UUID_RX,
- BLECharacteristic::PROPERTY_WRITE
- );
-
- pRxCharacteristic->setCallbacks(new MyCallbacks());
-
- // Start the service
- pService->start();
-
- // Start advertising
- pServer->getAdvertising()->start();
- Serial.println("Waiting a client connection to notify...");
-
- pinMode(D2, OUTPUT);
- pinMode(D3, OUTPUT);
- pinMode(D4, OUTPUT);
- pinMode(D5, OUTPUT);
- }
-
- void loop() {
-
- if (deviceConnected) {
- pTxCharacteristic->setValue(&txValue, 1);
- pTxCharacteristic->notify();
- txValue++;
- delay(10); // bluetooth stack will go into congestion, if too many packets are sent
- }
-
- // disconnecting
- if (!deviceConnected && oldDeviceConnected) {
- delay(500); // give the bluetooth stack the chance to get things ready
- pServer->startAdvertising(); // restart advertising
- Serial.println("start advertising");
- oldDeviceConnected = deviceConnected;
- }
- // connecting
- if (deviceConnected && !oldDeviceConnected) {
- // do stuff here on connecting
- oldDeviceConnected = deviceConnected;
- }
- }
-
【演示视频】
| 









 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






