|
1751| 1
|
二哈2:隔空一发!——“克赛号人间大炮”体感发射器 |

|
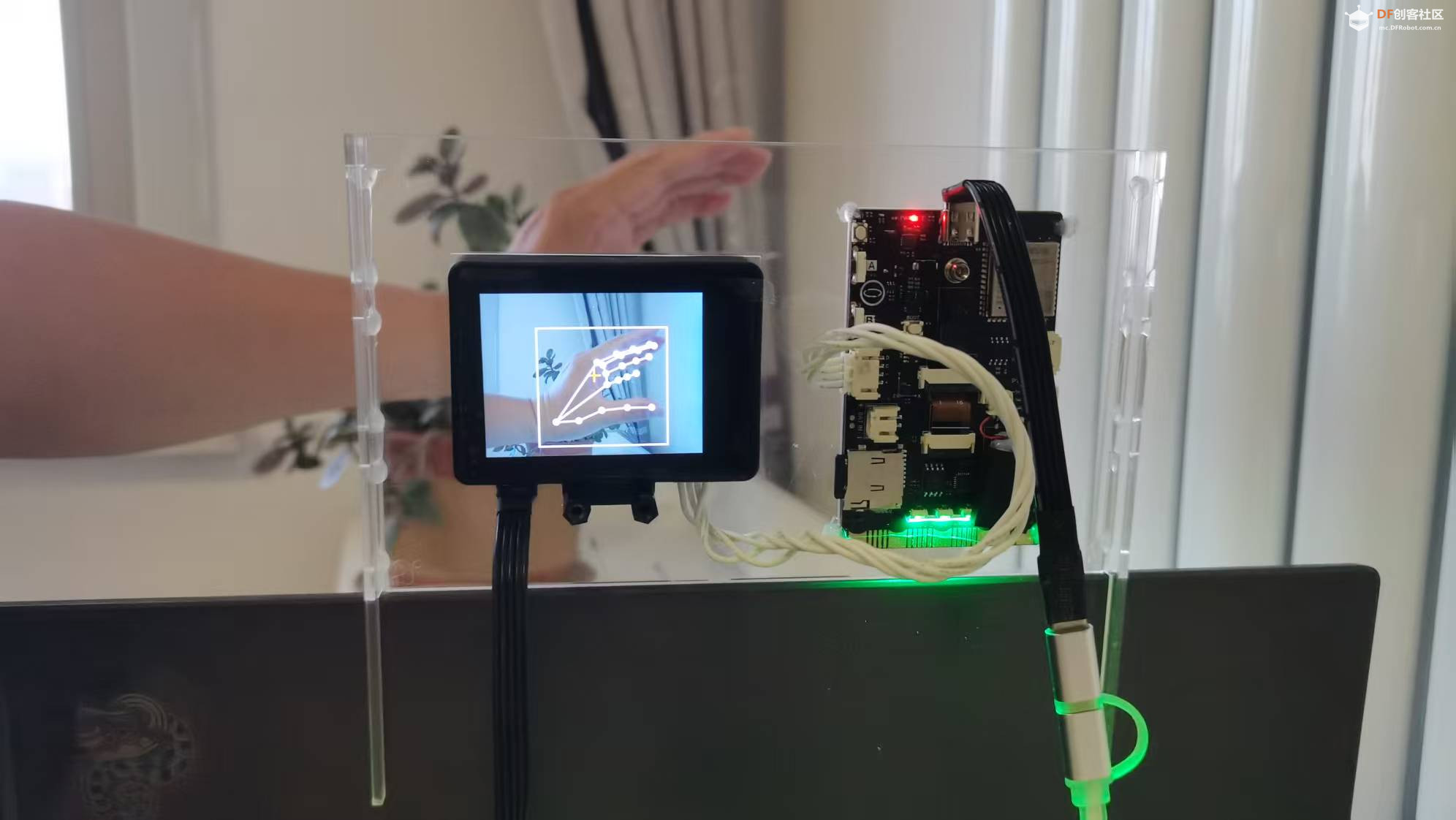
本帖最后由 云天 于 2025-9-28 21:02 编辑 【项目缘起】 今年9月的二哈识图2发布会上,官方只动了动手指,就隔空模拟了一把“愤怒的小鸟”游戏——这“无接触操控”实在上头。 【项目设计】 于是我把手边的行空板K10+HuskyLens 2组合起来,复刻一个“童年回忆杀”:  **拇指-食指一捏,克赛号蓄能;手掌一张,人间大炮发射!** Mind+实时模式图形化编程,10分钟就能搭完,正好适合给入门同学当“AI+IoT”第一课。  【硬件清单】 行空板K10 HuskyLens 2 【软件准备】 1. Mind+ 2.0→ 切换“实时模式” → 扩展 → 主控:行空板K10 传感器:HuskyLens2(AI视觉) 网络:MQTT(SIOT) 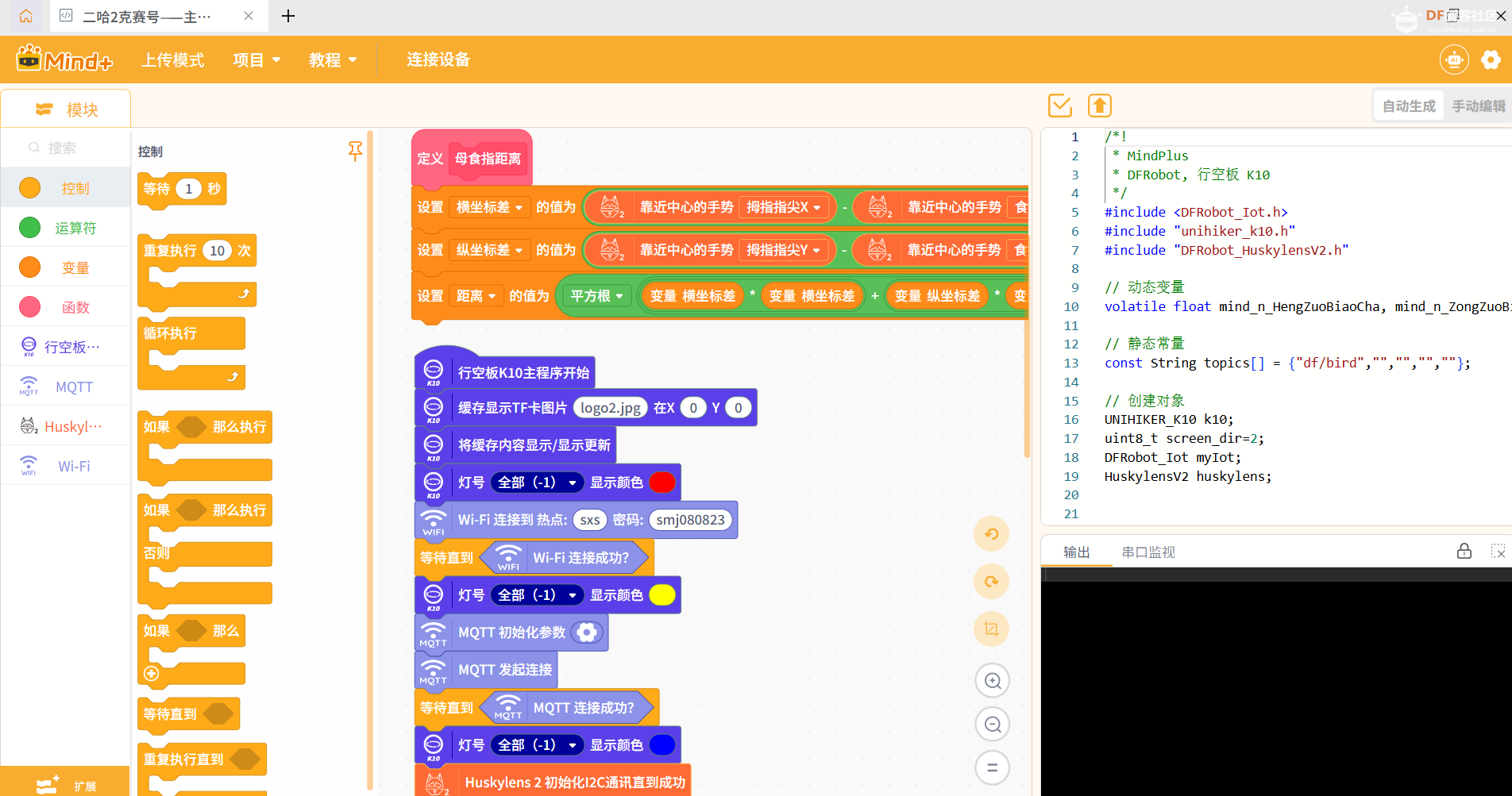 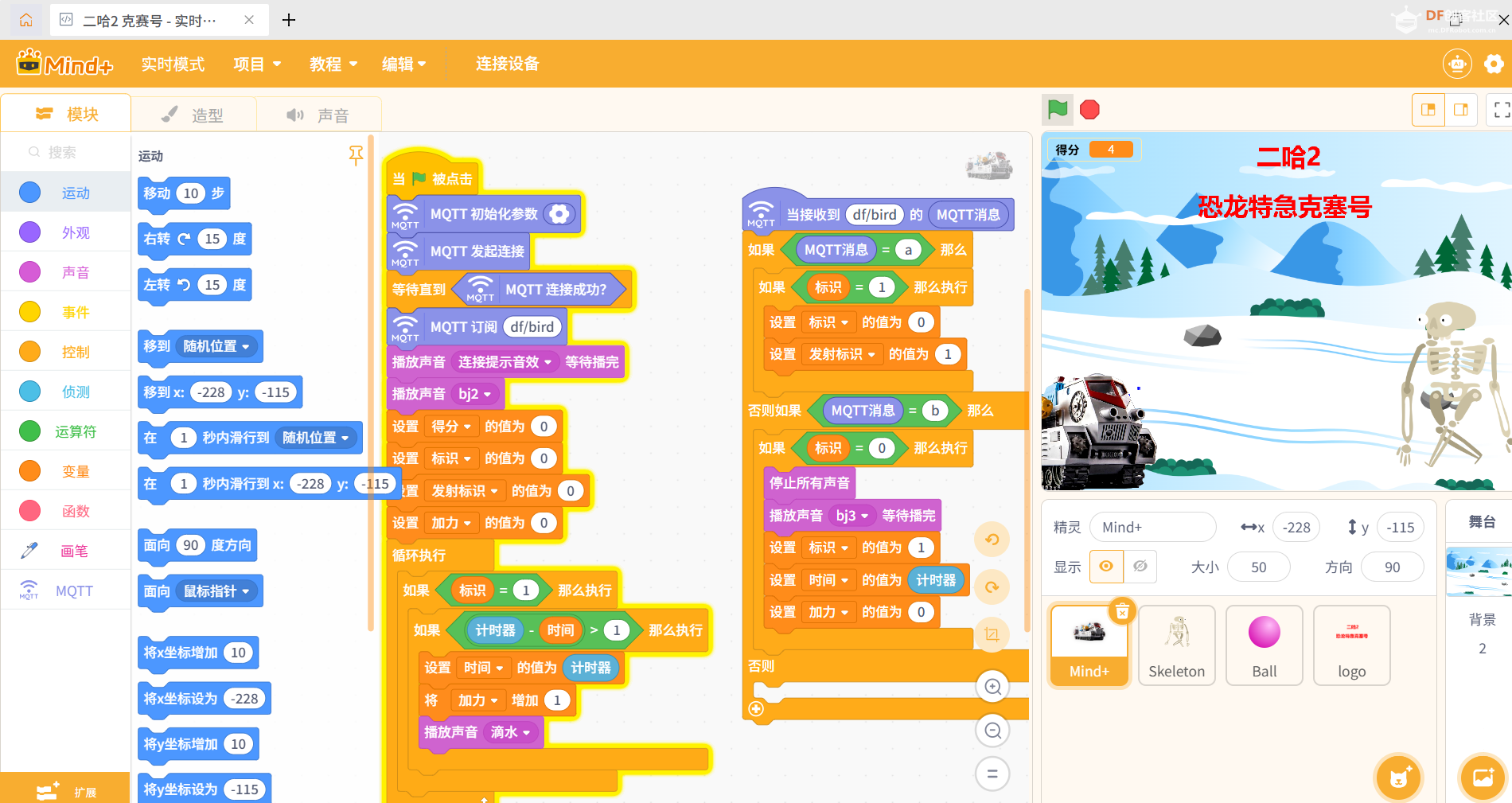 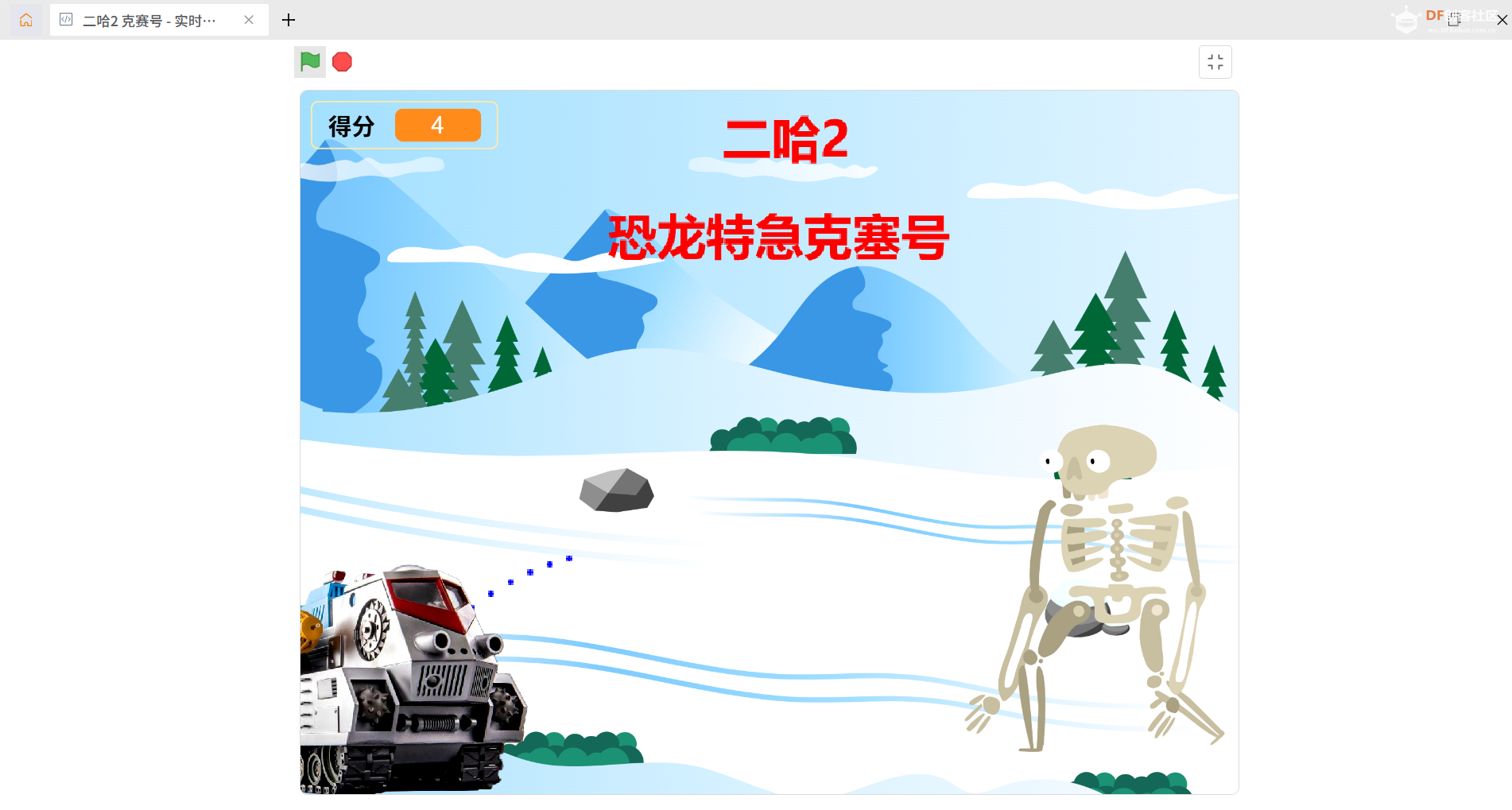 2. 电脑端运行SIOT,记录IP,默认账号siot / dfrobot。  【核心算法】 1. **“捏”与“张”判定** 利用HuskyLens2返回的“手势关键点”数组: x1 = 母指指尖x坐标 y1 = 母指指尖y坐标 x2 = 食指指尖x坐标 y2 = 食指指尖y坐标 计算欧氏距离 ``` d = √[(x1-x2)²+(y1-y2)²] ``` 经验阈值:d < 30 视为“捏(闭合)”,d ≥ 30 视为“张(张开)”。 2. **防抖 & 状态上报** 只在状态翻转时发送一次MQTT: 捏 → 发布“a”到主题 **df/bird** 张 → 发布“b”到主题 **df/bird** 【行空板K10主控流程】 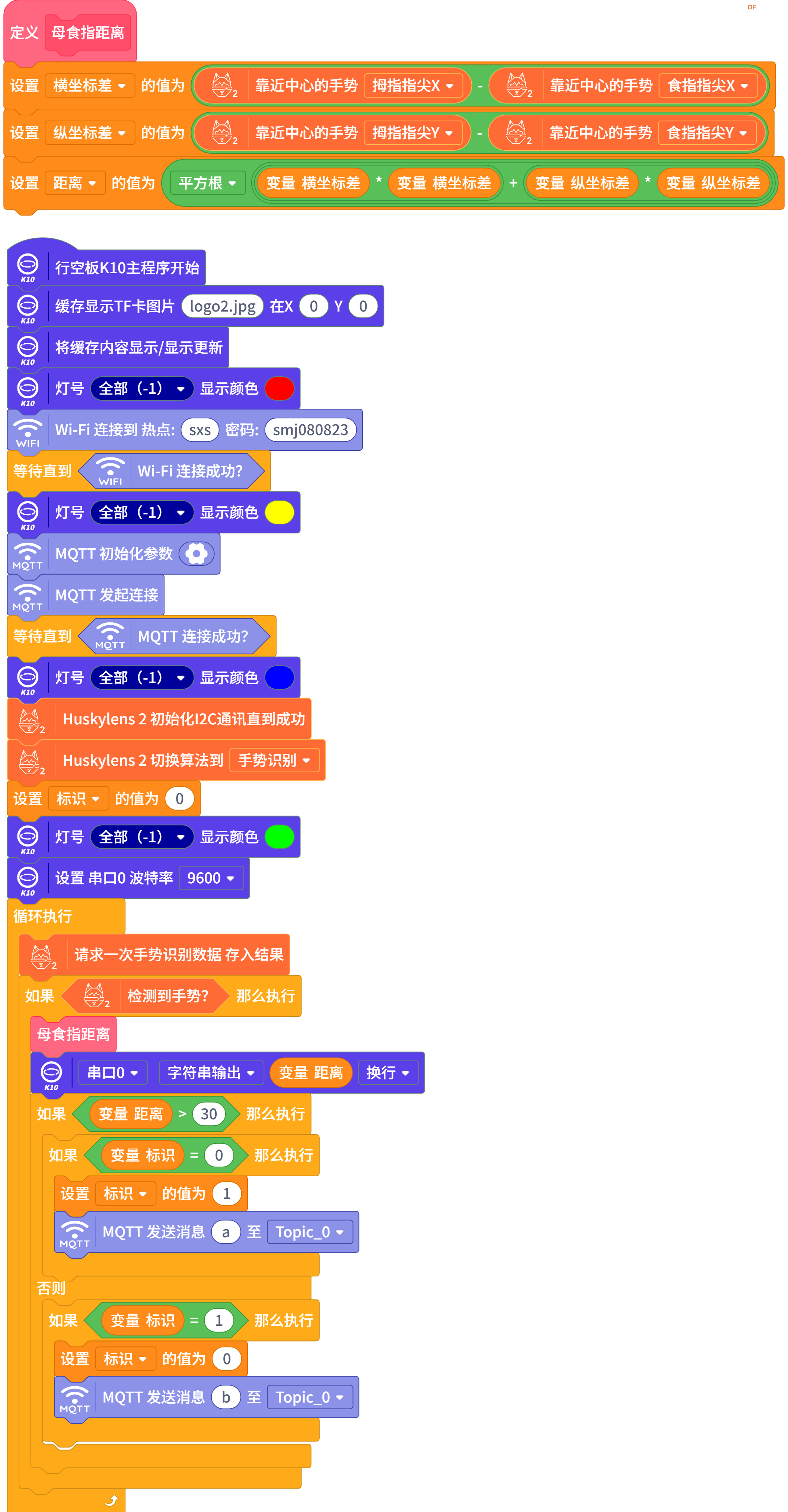 1. 初始化 - 连接Wi-Fi - MQTT(SIOT_IP,siot/dfrobot) - HuskyLens2 I²C握手 → 切到“手势识别”算法 2. 主循环 - 请求手势数据 - 调用自定义积木“母食指距离”计算d - 状态翻转检测 → MQTT发布a/b - RGB灯带随状态变色(捏=红,张=绿) 【Mind+实时模式】 克赛号角色 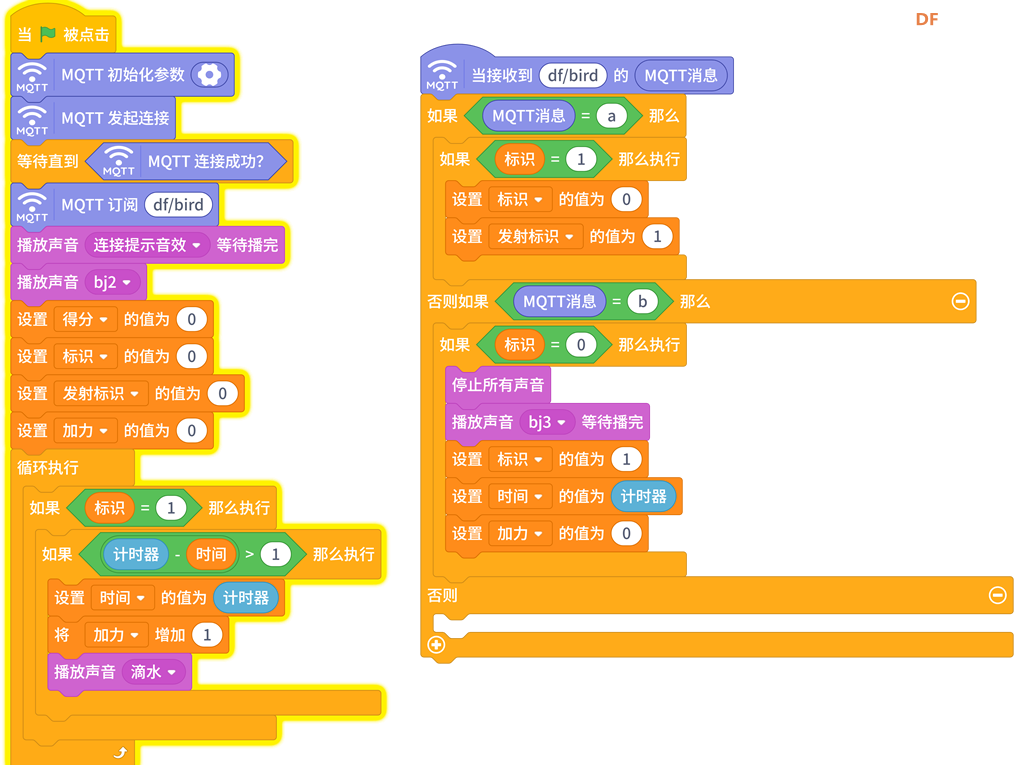 1. 连接同一SIOT → 订阅 **df/bird** 2. 收到“a” 播放“蓄力”音效bj2 变量【加力】开始递增 屏幕出现“人间大炮一级准备!”字幕 3. 收到“b” 播放“发射”音效bj3 角色向上冲刺+背景漩涡特效 变量【得分】+1 清空蓄力值,等待下一次指令 子弹角色程序  这段子弹程序通过“发射标识”切换两种状态:发射前在右侧绘制预览弹道、蓄力调整初速度,发射后从左侧射出真实子弹、模拟重力抛物线飞行,并在击中目标后触发得分、音效与状态重置,实现了一套完整的“瞄准-发射-命中反馈”机制。 轨迹算法是典型的**“重力抛物线模拟”**:
X(t+1) = X(t) + VX由此生成一条开口向下的二次抛物线;初速度 (VX, VY) 由“加力”变量线性放大,实现蓄力越远、射程越高的可控弹道。 怪物角色程序 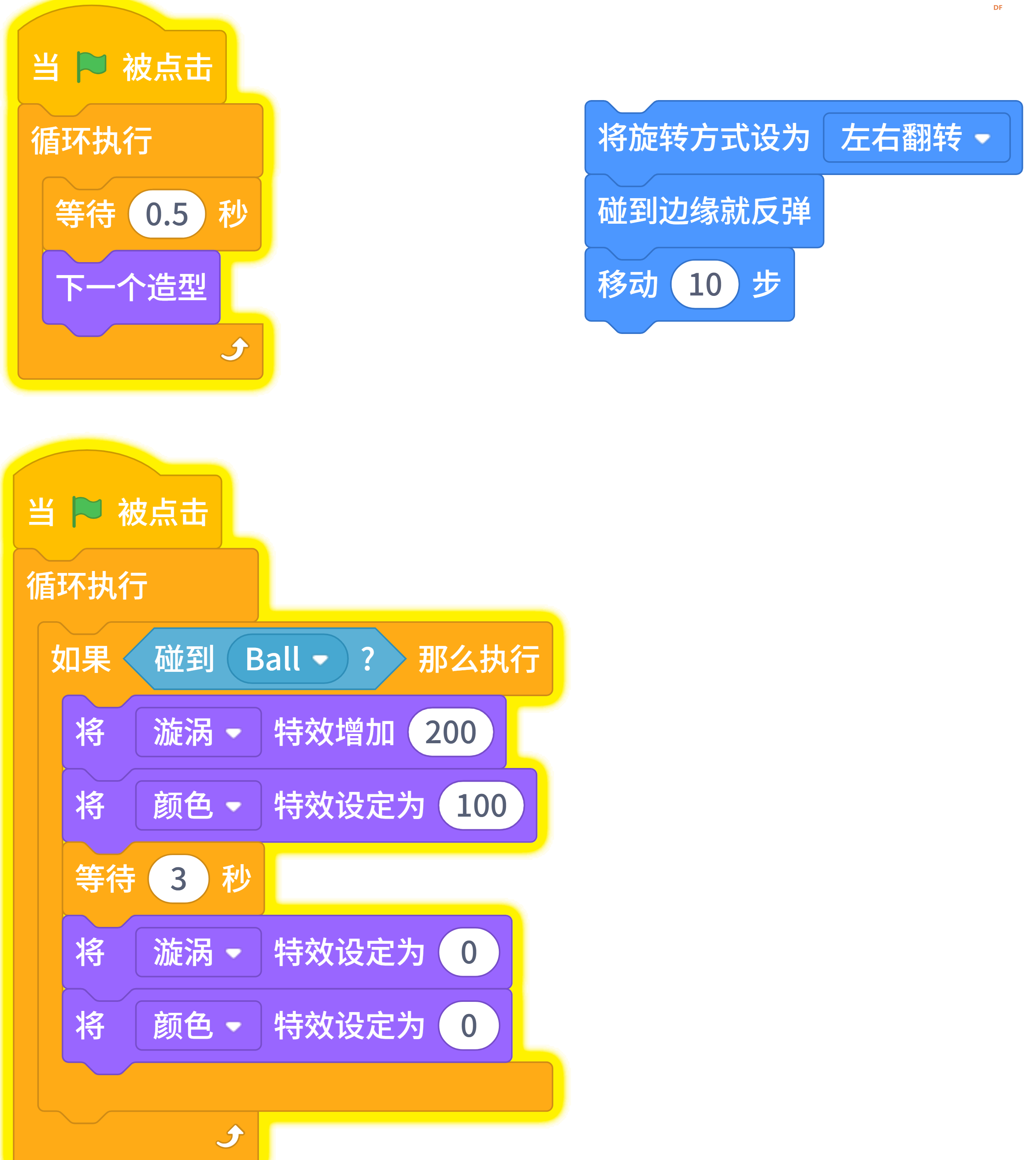 被击中的反馈
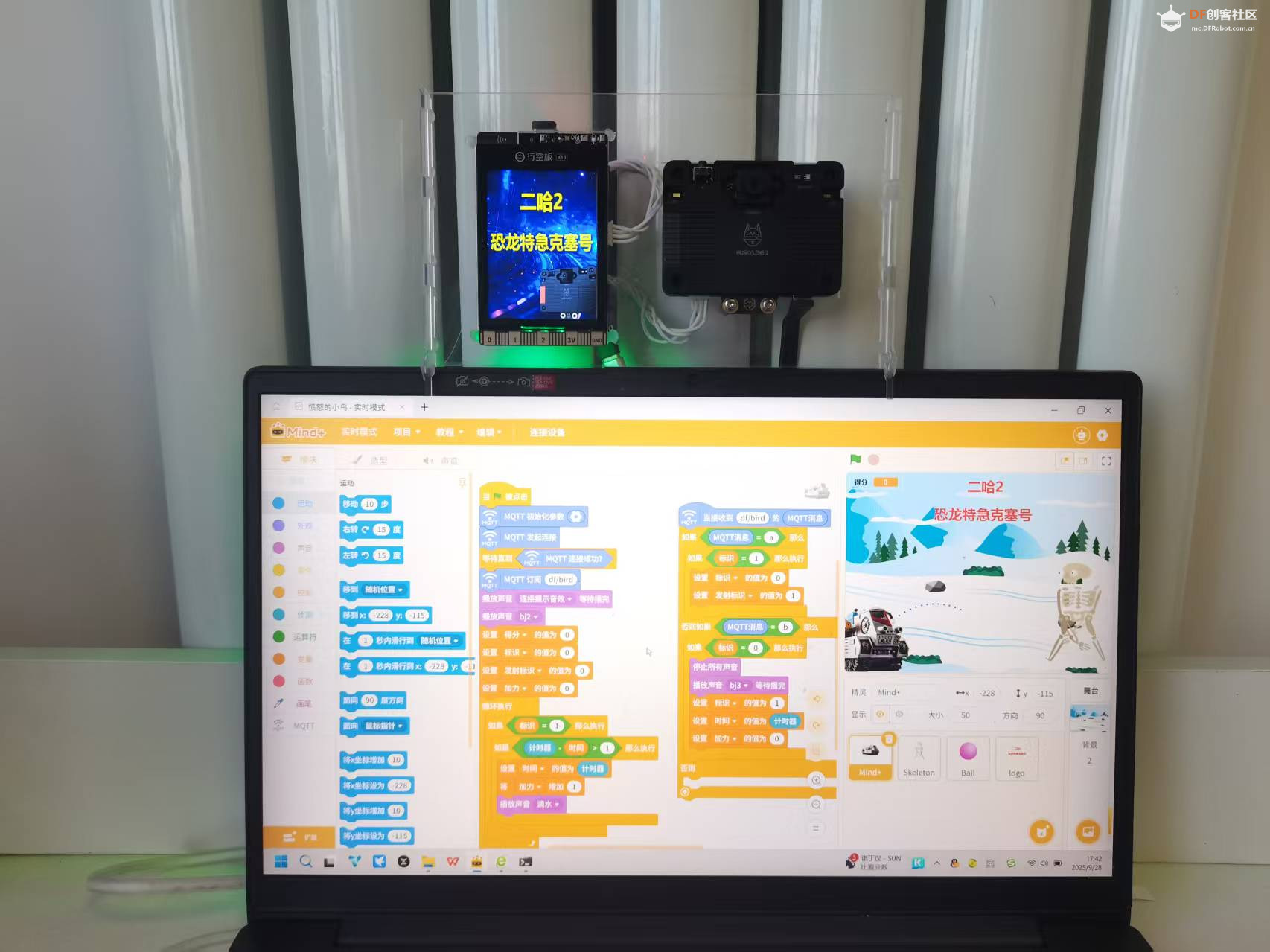   【效果演示】 【后续可玩方向】 把“距离”映射成无级调速,捏得越小,蓄力越快。 增加人体骨骼识别,用左手控制方向,右手控制发射,实现真正的“体感版坦克大战”。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






