本帖最后由 云天 于 2025-10-10 08:45 编辑
【项目起源】
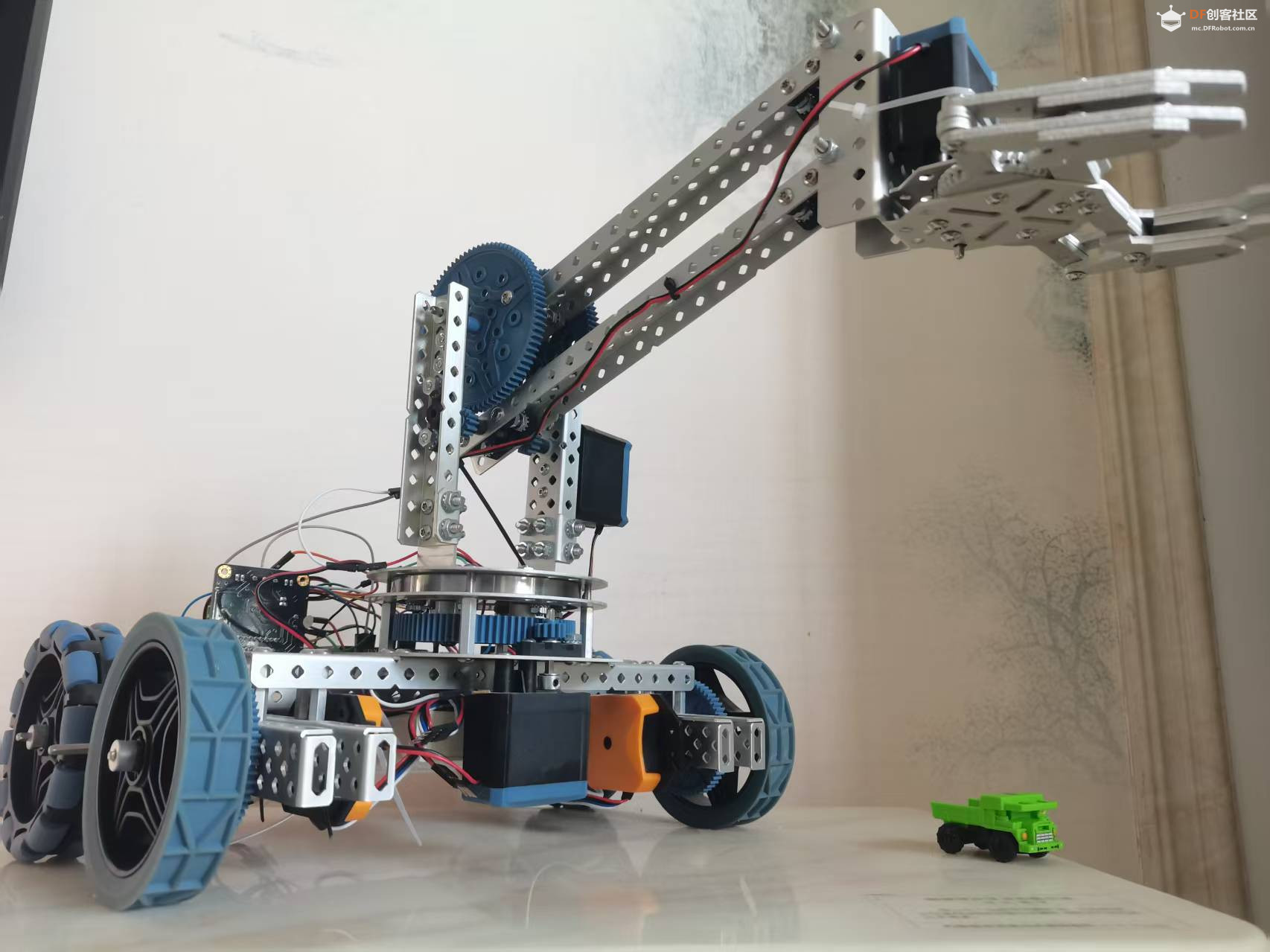
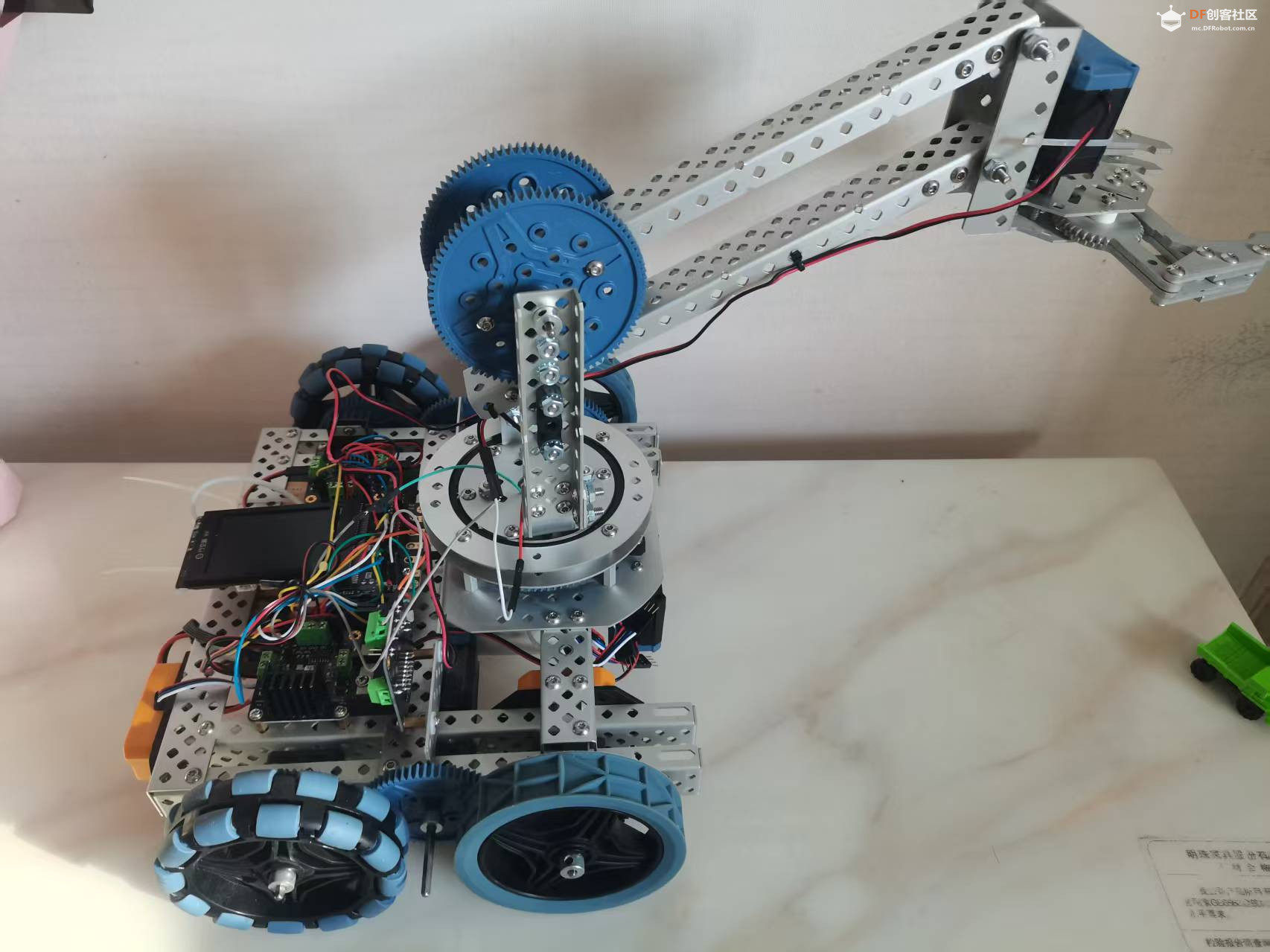
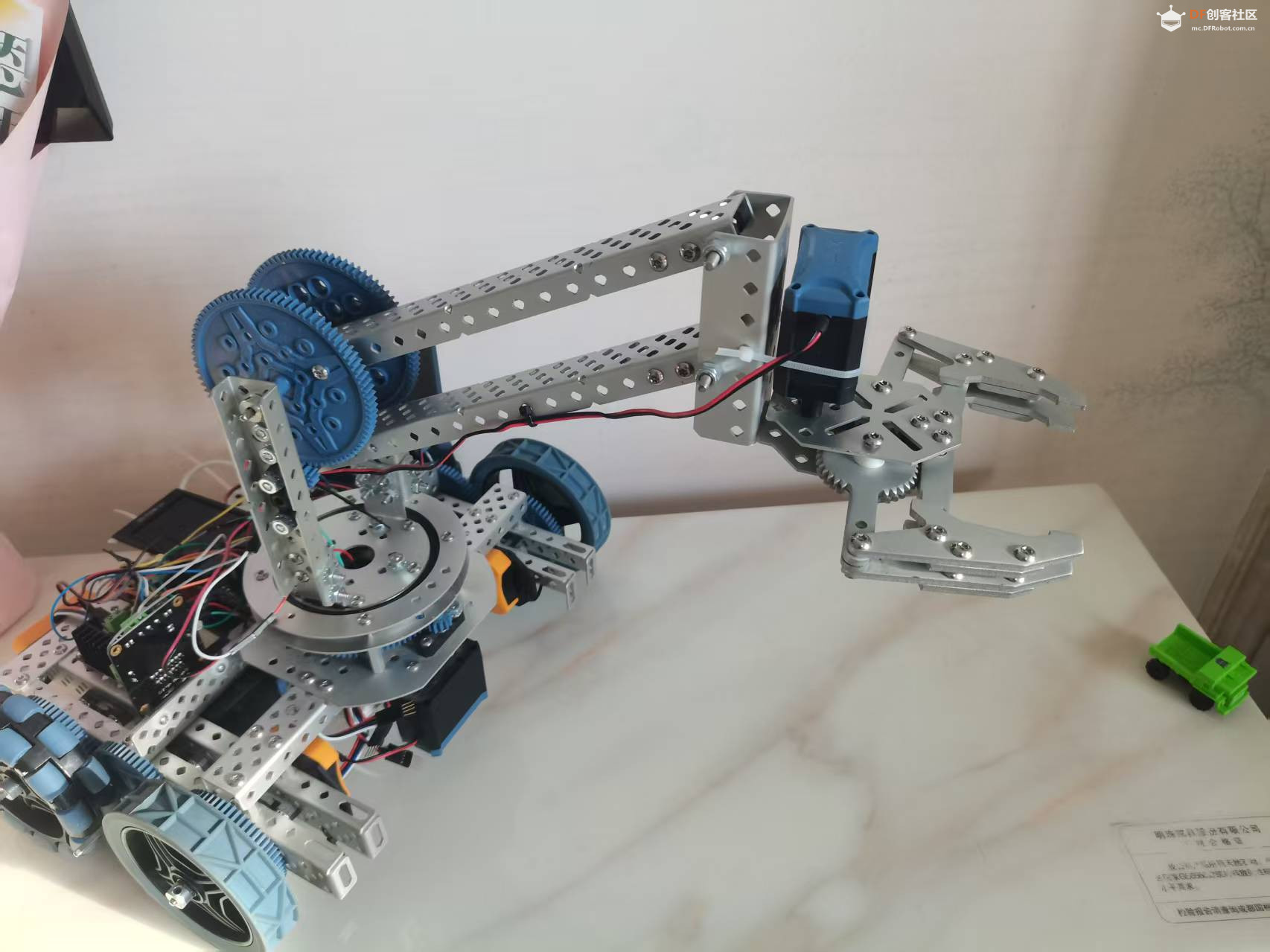
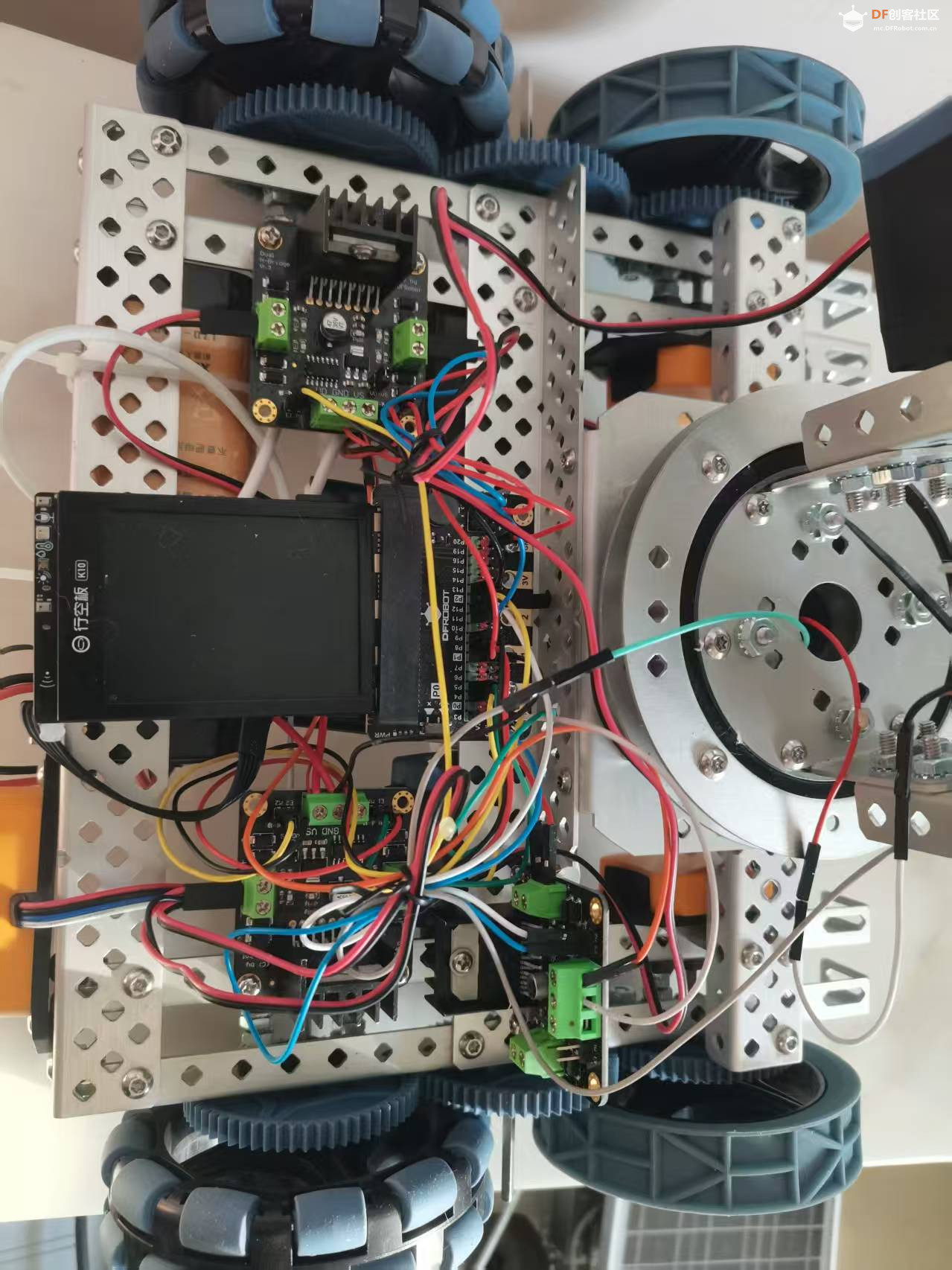
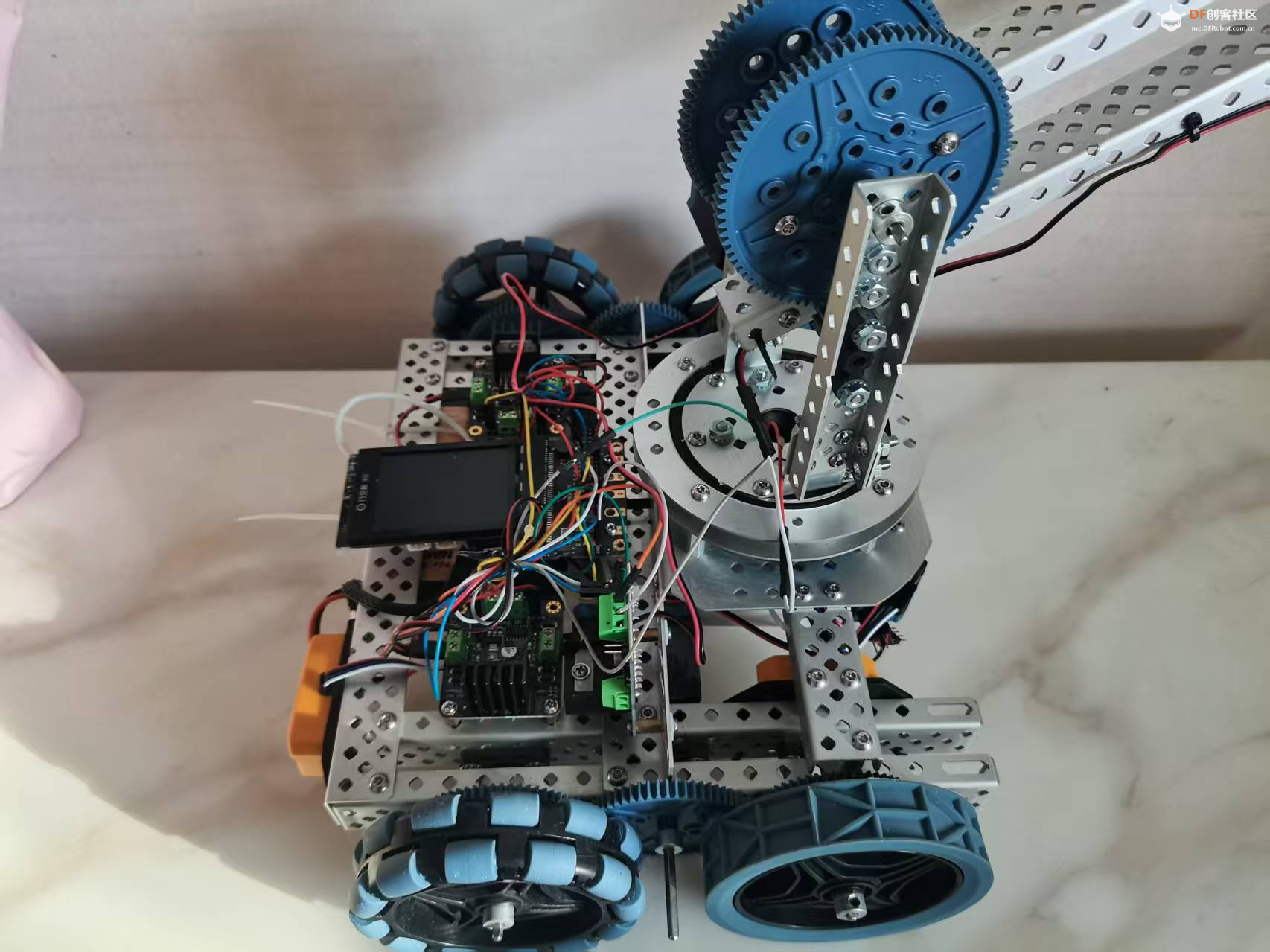
前不久,我在 DFRobot 论坛发过一个“能听会说的小车”雏形(https://mc.dfrobot.com.cn/thread-398314-1-1.html),但只用了行空板k10的四个引脚。这次我把金手指引出的“引脚”通过IO扩展板接入 3个L298N(DF-MD V1.3)电机驱动器,控制小车真正做到了“说一句,动一路”——前进、后退、左转、右转、机械臂 360° 旋转、抬起放下、机械爪张合,全部一条语音指令搞定。
【整体架构 】
```
┌------------------------┐
│ 小智 AI(LLM 语音)│ ←── 普通话/英语自然语言
└----------┬------------┘
│ WebSocket / MCP
┌----------┴----------------┐
│ 行空板 K10(ESP32-S3)│ ESP-IDF 5.x
│ ├─ 4×MEMS 麦克风 │ ←── “小智,前进”
│ ├─ ES8311 功放 │ →── “好的,正在前进”
│ ├─ LCD 实时表情 │
│ └─ TCA9555 16-bit IO ├-----------┐
└----------------------------┘ │
▼ I²C
┌--------------------------------------┐
│ IO 扩展板 │
│ P0~P15 全部引出 │
└--┬---------------┬-----------┬-----┘
│ │ │
L298N-底盘 L298N-臂 L298N-爪
┌----------┐ ┌----------┐ ┌--------┐
│左轮 右轮│ │水平 俯仰│ │ 张合 │
└----------┘ └----------┘ └--------┘
```
【电机接线对照表(TCA9555 → L298N)】
| 功能段 | P 引脚 | 8255 位 | L298N 通道 | 备注 |
|------------|--------|----------|-------------|------------------- ---|
| 左轮 ENA | P8 | BIT8 | ENA | 与 P12(IN1) 组合 |
| 右轮 ENB | P9 | BIT9 | ENB | 与 P13(IN2) 组合 |
| 左轮 IN1 | P5 | BIT12 | IN1 | |
| 右轮 IN2 | P4 | BIT13 | IN2 | |
| 爪 ENA | P3 | BIT14 | ENA | 接爪电机 |
| 爪 IN1 | P12 | BIT3 | IN1 | 0张开,1闭合 |
| 臂水平 | P2 | BIT7 | ENA | 水平旋转电机 |
| 臂水平 | P13 | BIT4 | IN2 | 0左旋转,1右旋转 |
| 臂俯仰 | P11 | BIT2 | ENA | 俯仰电机 |
| 臂俯仰 M | P1 | —— | IN1 | 直接 GPIO2 控制方向 |
【软件关键片段】
1. IO 扩展板一次初始化
- uint16_t output_pins = (1<<8)|(1<<9)|(1<<12)|(1<<13)|(1<<14)|(1<<3)|(1<<4)|(1<<2)|(1<<7);
-
- esp_io_expander_set_dir(io_expander, output_pins, IO_EXPANDER_OUTPUT);
-
- esp_io_expander_set_level(io_expander, output_pins, 0); // 全部归零,防止上电乱动
2. MCP“一句话注册”
- mcp_server.AddTool("self.car.action",
- "可控制小车及车载机械臂、机械爪的运行动作,小车的动作是前进、后退、停止、左转、右转。机械臂的动作是左旋转、右旋转、抬起、放下。机械爪的动作是张开、闭合",
- PropertyList({Property("动作", kPropertyTypeString)}),
- [this,gpio_num_P1](const PropertyList& properties) -> ReturnValue {
- std::string action=properties["动作"].value<std::string>().c_str();
- if (action=="前进"){
- SetPnumLevel(8,1);
- SetPnumLevel(9,1);
- SetPnumLevel(12,1);
- SetPnumLevel(13,1);
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="停止"){
- SetPnumLevel(8,0);//P8引脚
- SetPnumLevel(9,0);//P9引脚
- }else if(action=="后退"){
- SetPnumLevel(8,1);//P8引脚
- SetPnumLevel(9,1);//P9引脚
- SetPnumLevel(12,0);//P5引脚
- SetPnumLevel(13,0);//P4引脚
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
-
- }else if(action=="左转"){
-
- SetPnumLevel(8,1);
- SetPnumLevel(9,1);
- SetPnumLevel(12,0);
- SetPnumLevel(13,1);
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
-
- }else if(action=="右转"){
-
- SetPnumLevel(8,1);
- SetPnumLevel(9,1);
- SetPnumLevel(12,1);
- SetPnumLevel(13,0);
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
-
- }else if(action=="左旋转"){
- //机械臂水平动作
- SetPnumLevel(7,1);//P2引脚 E
- SetPnumLevel(4,0);//P13引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="右旋转"){
- //机械臂水平动作
- SetPnumLevel(7,1);//P2引脚 E
- SetPnumLevel(4,1);//P13引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="张开"){
- //机械爪动作
- SetPnumLevel(14,1);//P3引脚 E
- SetPnumLevel(3,0);//P12引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="闭合"){
- //机械爪动作
- SetPnumLevel(14,1);//P3引脚 E
- SetPnumLevel(3,1);//P12引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="抬起"){
- //机械臂垂直运动
- SetPnumLevel(2,1);//P11引脚 E
- gpio_set_level(gpio_num_P1, 0); //M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="放下"){
- //机械臂垂直运动
- SetPnumLevel(2,1);//P11引脚 E
- gpio_set_level(gpio_num_P1, 1); //M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(0.8 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }
- return ReturnValue(action);
-
- });
-
- }
把 12 条动作全部写进一个 Lambda,LLM 只需一次函数调用即可精准执行。
3. 停车回调函数
- static void StopMotorCallbackStatic(TimerHandle_t xTimer)
- {
- auto* self = static_cast<Df_K10Board*>(pvTimerGetTimerID(xTimer));
- self->StopMotorCallback();
-
- }
- void StopMotorCallback()
- {
- SetPnumLevel(8,0);
- SetPnumLevel(9,0);
- SetPnumLevel(12,0);
- SetPnumLevel(13,0);
- SetPnumLevel(14,0);
- SetPnumLevel(3,0);
- SetPnumLevel(2,0);
- SetPnumLevel(7,0);
- SetPnumLevel(4,0);
- }
每条动作都会根据实际行程重置定时器(爪 1.6 s、臂 0.8~1 s、底盘 1 s),兼顾“到位”与“安全”。
【演示视频】
【一句话总结】
“当语音助手不再只是‘聊天’,而是能直接操作 5 路电机、11 种动作、100% 开源可二次开发,你会发现——**给 ESP32 装上‘大模型’,才是嵌入式玩家的新浪漫。**”
【完整代码】
"XIAOZHI-ESP32-MAIN/main/boards/df-k10/df_k10_board.cc"
- #include "wifi_board.h"
- #include "k10_audio_codec.h"
- #include "display/lcd_display.h"
- #include "esp_lcd_ili9341.h"
- #include "led_control.h"
- #include "application.h"
- #include "button.h"
- #include "config.h"
- #include "esp32_camera.h"
- #include "led/circular_strip.h"
- #include "assets/lang_config.h"
- #include <esp_log.h>
- #include <esp_lcd_panel_vendor.h>
- #include <driver/i2c_master.h>
- #include <driver/spi_common.h>
- #include <wifi_station.h>
- #include <freertos/timers.h>
- #include "esp_io_expander_tca95xx_16bit.h"
- #include <mcp_server.h>
- #include <freertos/timers.h>
- #define TAG "DF-K10"
-
- LV_FONT_DECLARE(font_puhui_20_4);
- LV_FONT_DECLARE(font_awesome_20_4);
- TimerHandle_t stop_timer_ = nullptr;
- class Df_K10Board : public WifiBoard {
- private:
- i2c_master_bus_handle_t i2c_bus_;
- esp_io_expander_handle_t io_expander;
- LcdDisplay *display_;
- button_handle_t btn_a;
- button_handle_t btn_b;
- Esp32Camera* camera_;
-
- button_driver_t* btn_a_driver_ = nullptr;
- button_driver_t* btn_b_driver_ = nullptr;
-
- CircularStrip* led_strip_;
- TimerHandle_t stop_timer_ = nullptr;
- static Df_K10Board* instance_;
-
- void InitializeI2c() {
- // Initialize I2C peripheral
- i2c_master_bus_config_t i2c_bus_cfg = {
- .i2c_port = (i2c_port_t)1,
- .sda_io_num = AUDIO_CODEC_I2C_SDA_PIN,
- .scl_io_num = AUDIO_CODEC_I2C_SCL_PIN,
- .clk_source = I2C_CLK_SRC_DEFAULT,
- .glitch_ignore_cnt = 7,
- .intr_priority = 0,
- .trans_queue_depth = 0,
- .flags = {
- .enable_internal_pullup = 1,
- },
- };
- ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_bus_cfg, &i2c_bus_));
- }
-
- void InitializeSpi() {
- spi_bus_config_t buscfg = {};
- buscfg.mosi_io_num = GPIO_NUM_21;
- buscfg.miso_io_num = GPIO_NUM_NC;
- buscfg.sclk_io_num = GPIO_NUM_12;
- buscfg.quadwp_io_num = GPIO_NUM_NC;
- buscfg.quadhd_io_num = GPIO_NUM_NC;
- buscfg.max_transfer_sz = DISPLAY_WIDTH * DISPLAY_HEIGHT * sizeof(uint16_t);
- ESP_ERROR_CHECK(spi_bus_initialize(SPI3_HOST, &buscfg, SPI_DMA_CH_AUTO));
- }
-
- esp_err_t IoExpanderSetLevel(uint16_t pin_mask, uint8_t level) {
- return esp_io_expander_set_level(io_expander, pin_mask, level);
- }
-
- uint8_t IoExpanderGetLevel(uint16_t pin_mask) {
- uint32_t pin_val = 0;
- esp_io_expander_get_level(io_expander, DRV_IO_EXP_INPUT_MASK, &pin_val);
- pin_mask &= DRV_IO_EXP_INPUT_MASK;
- return (uint8_t)((pin_val & pin_mask) ? 1 : 0);
- }
-
- void InitializeIoExpander() {
- esp_io_expander_new_i2c_tca95xx_16bit(
- i2c_bus_, ESP_IO_EXPANDER_I2C_TCA9555_ADDRESS_000, &io_expander);
-
- esp_err_t ret;
- ret = esp_io_expander_print_state(io_expander);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Print state failed: %s", esp_err_to_name(ret));
- }
- ret = esp_io_expander_set_dir(io_expander, IO_EXPANDER_PIN_NUM_0,IO_EXPANDER_OUTPUT);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
- }
- ret = esp_io_expander_set_level(io_expander, 0, 1);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Set level failed: %s", esp_err_to_name(ret));
- }
- ret = esp_io_expander_set_dir(
- io_expander, DRV_IO_EXP_INPUT_MASK,
- IO_EXPANDER_INPUT);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
- }
- // 设置多个引脚为输出模式
- uint16_t output_pins = (1 << 8) | (1 << 9) | (1 << 12) | (1 << 13) | (1 << 14) | (1 << 3) | (1 << 4) | (1 << 2) | (1 << 7); // 引脚 P8,P9,P5,P4,P3,P12,P13,P11,P2
- ret = esp_io_expander_set_dir(io_expander, output_pins,IO_EXPANDER_OUTPUT);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
- }
- ret = esp_io_expander_set_level(io_expander, output_pins, 0);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Set level failed: %s", esp_err_to_name(ret));
- }
-
- }
- void SetPnumLevel(uint16_t Pnum,uint8_t level) {
- esp_err_t ret = esp_io_expander_set_level(io_expander, 1<<Pnum, level);
- if (ret != ESP_OK) {
- ESP_LOGE(TAG, "Set level for P failed: %s", esp_err_to_name(ret));
- }
- }
- void InitializeButtons() {
- instance_ = this;
-
- // Button A
- button_config_t btn_a_config = {
- .long_press_time = 1000,
- .short_press_time = 0
- };
- btn_a_driver_ = (button_driver_t*)calloc(1, sizeof(button_driver_t));
- btn_a_driver_->enable_power_save = false;
- btn_a_driver_->get_key_level = [](button_driver_t *button_driver) -> uint8_t {
- return !instance_->IoExpanderGetLevel(IO_EXPANDER_PIN_NUM_2);
- };
- ESP_ERROR_CHECK(iot_button_create(&btn_a_config, btn_a_driver_, &btn_a));
- iot_button_register_cb(btn_a, BUTTON_SINGLE_CLICK, nullptr, [](void* button_handle, void* usr_data) {
- auto self = static_cast<Df_K10Board*>(usr_data);
- auto& app = Application::GetInstance();
- if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
- self->ResetWifiConfiguration();
- }
- app.ToggleChatState();
- }, this);
- iot_button_register_cb(btn_a, BUTTON_LONG_PRESS_START, nullptr, [](void* button_handle, void* usr_data) {
- auto self = static_cast<Df_K10Board*>(usr_data);
- auto codec = self->GetAudioCodec();
- auto volume = codec->output_volume() - 10;
- if (volume < 0) {
- volume = 0;
- }
- codec->SetOutputVolume(volume);
- self->GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
- }, this);
-
- // Button B
- button_config_t btn_b_config = {
- .long_press_time = 1000,
- .short_press_time = 0
- };
- btn_b_driver_ = (button_driver_t*)calloc(1, sizeof(button_driver_t));
- btn_b_driver_->enable_power_save = false;
- btn_b_driver_->get_key_level = [](button_driver_t *button_driver) -> uint8_t {
- return !instance_->IoExpanderGetLevel(IO_EXPANDER_PIN_NUM_12);
- };
- ESP_ERROR_CHECK(iot_button_create(&btn_b_config, btn_b_driver_, &btn_b));
- iot_button_register_cb(btn_b, BUTTON_SINGLE_CLICK, nullptr, [](void* button_handle, void* usr_data) {
- auto self = static_cast<Df_K10Board*>(usr_data);
- auto& app = Application::GetInstance();
- if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
- self->ResetWifiConfiguration();
- }
- app.ToggleChatState();
- }, this);
- iot_button_register_cb(btn_b, BUTTON_LONG_PRESS_START, nullptr, [](void* button_handle, void* usr_data) {
- auto self = static_cast<Df_K10Board*>(usr_data);
- auto codec = self->GetAudioCodec();
- auto volume = codec->output_volume() + 10;
- if (volume > 100) {
- volume = 100;
- }
- codec->SetOutputVolume(volume);
- self->GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
- }, this);
- }
-
- void InitializeCamera() {
-
- camera_config_t config = {};
- config.ledc_channel = LEDC_CHANNEL_2; // LEDC通道选择 用于生成XCLK时钟 但是S3不用
- config.ledc_timer = LEDC_TIMER_2; // LEDC timer选择 用于生成XCLK时钟 但是S3不用
- config.pin_d0 = CAMERA_PIN_D2;
- config.pin_d1 = CAMERA_PIN_D3;
- config.pin_d2 = CAMERA_PIN_D4;
- config.pin_d3 = CAMERA_PIN_D5;
- config.pin_d4 = CAMERA_PIN_D6;
- config.pin_d5 = CAMERA_PIN_D7;
- config.pin_d6 = CAMERA_PIN_D8;
- config.pin_d7 = CAMERA_PIN_D9;
- config.pin_xclk = CAMERA_PIN_XCLK;
- config.pin_pclk = CAMERA_PIN_PCLK;
- config.pin_vsync = CAMERA_PIN_VSYNC;
- config.pin_href = CAMERA_PIN_HREF;
- config.pin_sccb_sda = -1; // 这里如果写-1 表示使用已经初始化的I2C接口
- config.pin_sccb_scl = CAMERA_PIN_SIOC;
- config.sccb_i2c_port = 1; // 这里如果写1 默认使用I2C1
- config.pin_pwdn = CAMERA_PIN_PWDN;
- config.pin_reset = CAMERA_PIN_RESET;
- config.xclk_freq_hz = XCLK_FREQ_HZ;
- config.pixel_format = PIXFORMAT_RGB565;
- config.frame_size = FRAMESIZE_VGA;
- config.jpeg_quality = 12;
- config.fb_count = 1;
- config.fb_location = CAMERA_FB_IN_PSRAM;
- config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
-
- camera_ = new Esp32Camera(config);
- }
-
- void InitializeIli9341Display() {
- esp_lcd_panel_io_handle_t panel_io = nullptr;
- esp_lcd_panel_handle_t panel = nullptr;
-
- // 液晶屏控制IO初始化
- ESP_LOGD(TAG, "Install panel IO");
- esp_lcd_panel_io_spi_config_t io_config = {};
- io_config.cs_gpio_num = GPIO_NUM_14;
- io_config.dc_gpio_num = GPIO_NUM_13;
- io_config.spi_mode = 0;
- io_config.pclk_hz = 40 * 1000 * 1000;
- io_config.trans_queue_depth = 10;
- io_config.lcd_cmd_bits = 8;
- io_config.lcd_param_bits = 8;
- ESP_ERROR_CHECK(esp_lcd_new_panel_io_spi(SPI3_HOST, &io_config, &panel_io));
-
- // 初始化液晶屏驱动芯片
- ESP_LOGD(TAG, "Install LCD driver");
- esp_lcd_panel_dev_config_t panel_config = {};
- panel_config.reset_gpio_num = GPIO_NUM_NC;
- panel_config.bits_per_pixel = 16;
- panel_config.color_space = ESP_LCD_COLOR_SPACE_BGR;
-
- ESP_ERROR_CHECK(esp_lcd_new_panel_ili9341(panel_io, &panel_config, &panel));
- ESP_ERROR_CHECK(esp_lcd_panel_reset(panel));
- ESP_ERROR_CHECK(esp_lcd_panel_init(panel));
- ESP_ERROR_CHECK(esp_lcd_panel_invert_color(panel, DISPLAY_BACKLIGHT_OUTPUT_INVERT));
- ESP_ERROR_CHECK(esp_lcd_panel_swap_xy(panel, DISPLAY_SWAP_XY));
- ESP_ERROR_CHECK(esp_lcd_panel_mirror(panel, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y));
- ESP_ERROR_CHECK(esp_lcd_panel_disp_on_off(panel, true));
-
- display_ = new SpiLcdDisplay(panel_io, panel,
- DISPLAY_WIDTH, DISPLAY_HEIGHT, DISPLAY_OFFSET_X, DISPLAY_OFFSET_Y, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y, DISPLAY_SWAP_XY,
- {
- .text_font = &font_puhui_20_4,
- .icon_font = &font_awesome_20_4,
- .emoji_font = font_emoji_64_init(),
- });
- }
-
- // 物联网初始化,添加对 AI 可见设备
- void InitializeIot() {
- gpio_num_t gpio_num_P0 = GPIO_NUM_1;
- gpio_num_t gpio_num_P1 = GPIO_NUM_2;
- gpio_config_t cfg = {
- .pin_bit_mask = (1ULL << gpio_num_P0) | (1ULL << gpio_num_P1),
- .mode = GPIO_MODE_OUTPUT,
- .pull_up_en = GPIO_PULLUP_DISABLE,
- .pull_down_en = GPIO_PULLDOWN_DISABLE,
- .intr_type = GPIO_INTR_DISABLE,
- };
- ESP_ERROR_CHECK(gpio_config(&cfg));
- gpio_set_level(gpio_num_P0, 0);
- gpio_set_level(gpio_num_P1, 0);
- stop_timer_ = xTimerCreate("StopMotorTimer",pdMS_TO_TICKS(1000),pdFALSE,this,StopMotorCallbackStatic);
-
- auto& mcp_server = McpServer::GetInstance();
-
- mcp_server.AddTool("self.car.action",
- "可控制小车及车载机械臂、机械爪的运行动作,小车的动作是前进、后退、停止、左转、右转。机械臂的动作是左旋转、右旋转、抬起、放下。机械爪的动作是张开、闭合",
- PropertyList({Property("动作", kPropertyTypeString)}),
- [this,gpio_num_P1](const PropertyList& properties) -> ReturnValue {
- std::string action=properties["动作"].value<std::string>().c_str();
- if (action=="前进"){
- SetPnumLevel(8,1);
- SetPnumLevel(9,1);
- SetPnumLevel(12,1);
- SetPnumLevel(13,1);
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="停止"){
- SetPnumLevel(8,0);//P8引脚
- SetPnumLevel(9,0);//P9引脚
- }else if(action=="后退"){
- SetPnumLevel(8,1);//P8引脚
- SetPnumLevel(9,1);//P9引脚
- SetPnumLevel(12,0);//P5引脚
- SetPnumLevel(13,0);//P4引脚
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- //夹子
- //SetPnumLevel(14,0);//P3引脚 E
- //SetPnumLevel(3,0);//P12引脚 M
- //上下
-
- //SetPnumLevel(2,0);//P11引脚 E
-
- //水平
- //SetPnumLevel(7,0);//P2引脚 E
- //SetPnumLevel(4,0);//P13引脚 M
-
-
- //SetPnumLevel(15,0);//LED灯
- //SetPnumLevel(16,0);无对应引脚
- //SetPnumLevel(1,0);//无对应引脚
- //SetPnumLevel(5,0);//无对应引脚
- //SetPnumLevel(6,0);//无对应引脚
- //SetPnumLevel(10,0);//无对应引脚
- //SetPnumLevel(11,0);//无对应引脚
- }else if(action=="左转"){
-
- SetPnumLevel(8,1);
- SetPnumLevel(9,1);
- SetPnumLevel(12,0);
- SetPnumLevel(13,1);
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
-
- }else if(action=="右转"){
-
- SetPnumLevel(8,1);
- SetPnumLevel(9,1);
- SetPnumLevel(12,1);
- SetPnumLevel(13,0);
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
-
- }else if(action=="左旋转"){
-
- SetPnumLevel(7,1);//P2引脚 E
- SetPnumLevel(4,0);//P13引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="右旋转"){
-
- SetPnumLevel(7,1);//P2引脚 E
- SetPnumLevel(4,1);//P13引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="张开"){
-
- SetPnumLevel(14,1);//P3引脚 E
- SetPnumLevel(3,0);//P12引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="闭合"){
-
- SetPnumLevel(14,1);//P3引脚 E
- SetPnumLevel(3,1);//P12引脚 M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="抬起"){
-
- SetPnumLevel(2,1);//P11引脚 E
- gpio_set_level(gpio_num_P1, 0); //M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }else if(action=="放下"){
-
- SetPnumLevel(2,1);//P11引脚 E
- gpio_set_level(gpio_num_P1, 1); //M
- if (stop_timer_) {
- xTimerStop(stop_timer_, 0);
- xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(0.8 * 1000), 0);
- xTimerStart(stop_timer_, 0);
- }
- }
- return ReturnValue(action);
-
- });
-
- }
- static void StopMotorCallbackStatic(TimerHandle_t xTimer)
- {
- auto* self = static_cast<Df_K10Board*>(pvTimerGetTimerID(xTimer));
- self->StopMotorCallback();
-
- }
- void StopMotorCallback()
- {
- SetPnumLevel(8,0);
- SetPnumLevel(9,0);
- SetPnumLevel(12,0);
- SetPnumLevel(13,0);
- SetPnumLevel(14,0);
- SetPnumLevel(3,0);
- SetPnumLevel(2,0);
- SetPnumLevel(7,0);
- SetPnumLevel(4,0);
- }
-
- public:
-
- Df_K10Board() {
- InitializeI2c();
- InitializeIoExpander();
- InitializeSpi();
- InitializeIli9341Display();
- InitializeButtons();
- InitializeIot();
- //InitializeCamera();
- }
-
- virtual AudioCodec *GetAudioCodec() override {
- static K10AudioCodec audio_codec(
- i2c_bus_,
- AUDIO_INPUT_SAMPLE_RATE,
- AUDIO_OUTPUT_SAMPLE_RATE,
- AUDIO_I2S_GPIO_MCLK,
- AUDIO_I2S_GPIO_BCLK,
- AUDIO_I2S_GPIO_WS,
- AUDIO_I2S_GPIO_DOUT,
- AUDIO_I2S_GPIO_DIN,
- AUDIO_CODEC_PA_PIN,
- AUDIO_CODEC_ES8311_ADDR,
- AUDIO_CODEC_ES7210_ADDR,
- AUDIO_INPUT_REFERENCE);
- return &audio_codec;
- }
-
- //virtual Camera* GetCamera() override {
- //return camera_;
- //}
-
- virtual Display *GetDisplay() override {
- return display_;
- }
- };
-
- DECLARE_BOARD(Df_K10Board);
-
- Df_K10Board* Df_K10Board::instance_ = nullptr;
|




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 悔悟卡
悔悟卡 匿名卡
匿名卡
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






