|
4607| 1
|
二哈2——“如影随形”PI视觉跟随履带车 |

|
本帖最后由 云天 于 2025-10-8 17:22 编辑 【项目简介】 本项目基于 Arduino UNO + L298N 双路电机驱动板,搭配 DFRobot HuskyLens 2 AI 视觉传感器,实现“看得见”的履带小车。通过 HuskyLens2 内置的“人体姿态识别”算法,实时获取人物在画面中的中心坐标 (X, Y) 以及人体框高/宽。整套控制系统采用 PI 算法: 1. 水平方向以画面中心 X=320 为基准,计算误差后输出差速 PWM,使车头始终“盯人”; 2. 深度方向以人体框高、宽作为“距离”参考,当目标小于安全阈值时,主动前进;大于阈值时,原地待命。 整个开发过程在 Mind+ 图形化环境中完成,分三阶段递进调试,既适合新手理解 PID 思想,又能直接落地为“如影随形”的跟随小车。  1. Arduino UNO R3 ×1 +IO扩展板 2. L298N 双路电机驱动板 ×1 3. 履带小车底盘(带 2×TT 电机) ×1 4. HuskyLens 2 人工智能摄像头 ×1 5. 7.4 V 2200 mAh 锂电池组 ×2 (分别给L289N和Arduino供电) 7. 杜邦线、螺丝、魔术扎带若干 【硬件连线】 - 电机接口:左电机 → L298N OUT1/OUT2;右电机 → OUT3/OUT4。 - 电源接口:电池+ → L298N +12 V;电池– → L298N GND;并与Arduino共地。 - 信号接口: – HuskyLens SDA → A4,SCL → A5(I²C 通信) – L298N 输入端:IN1~IN4 分别接 D7、D8、D9、D10(Mind+ 图形块默认引脚)。 – PWM 调速:ENA→D5,ENB→D3(支持 0~255 级调速)。 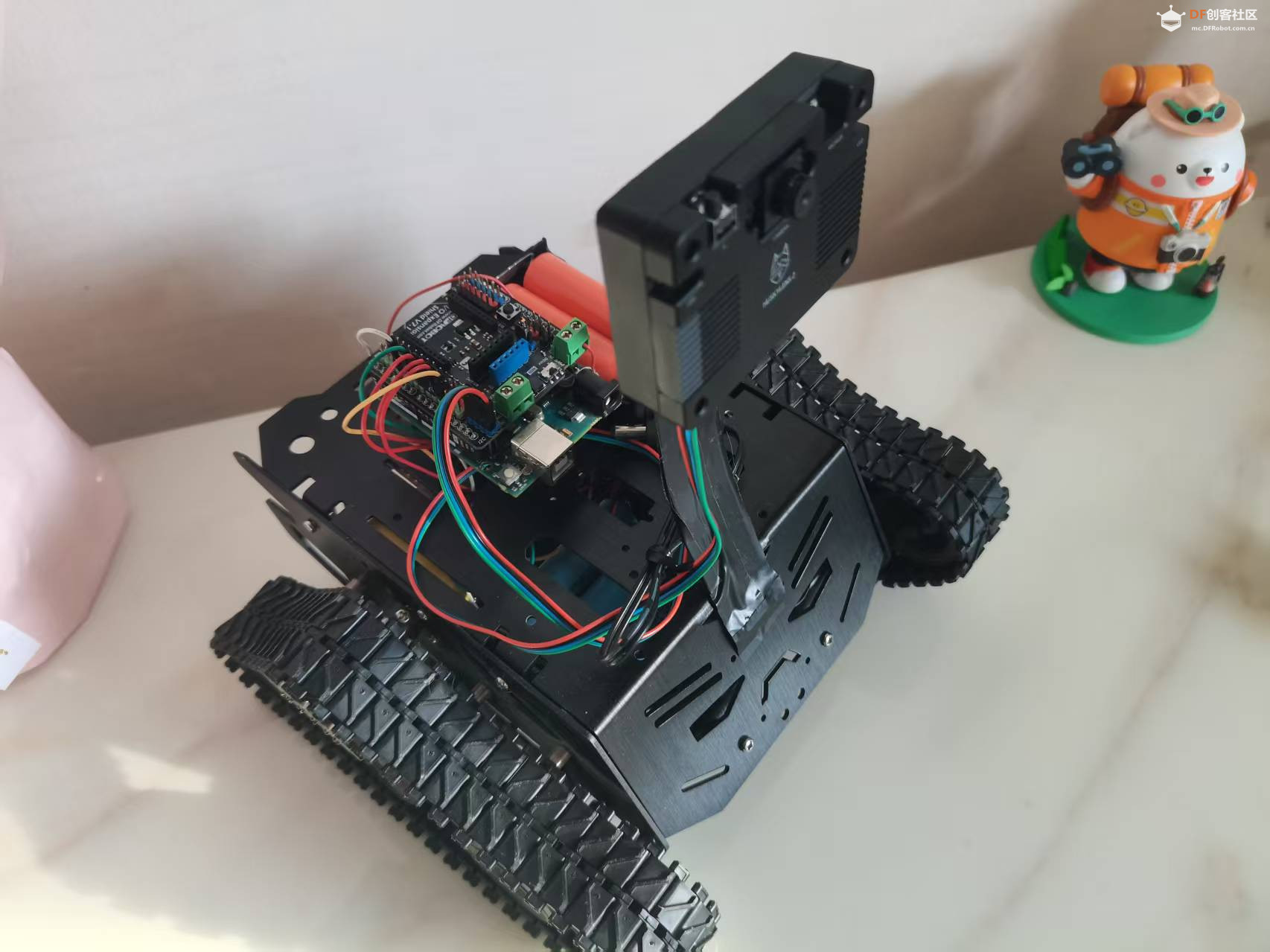 【软件环境】 Mind+ v2.0版本,主控选择“Arduino UNO”,扩展库加载“HuskyLens2”。图形块可转 Arduino C,方便后续迁移到 VSCode/PlatformIO。 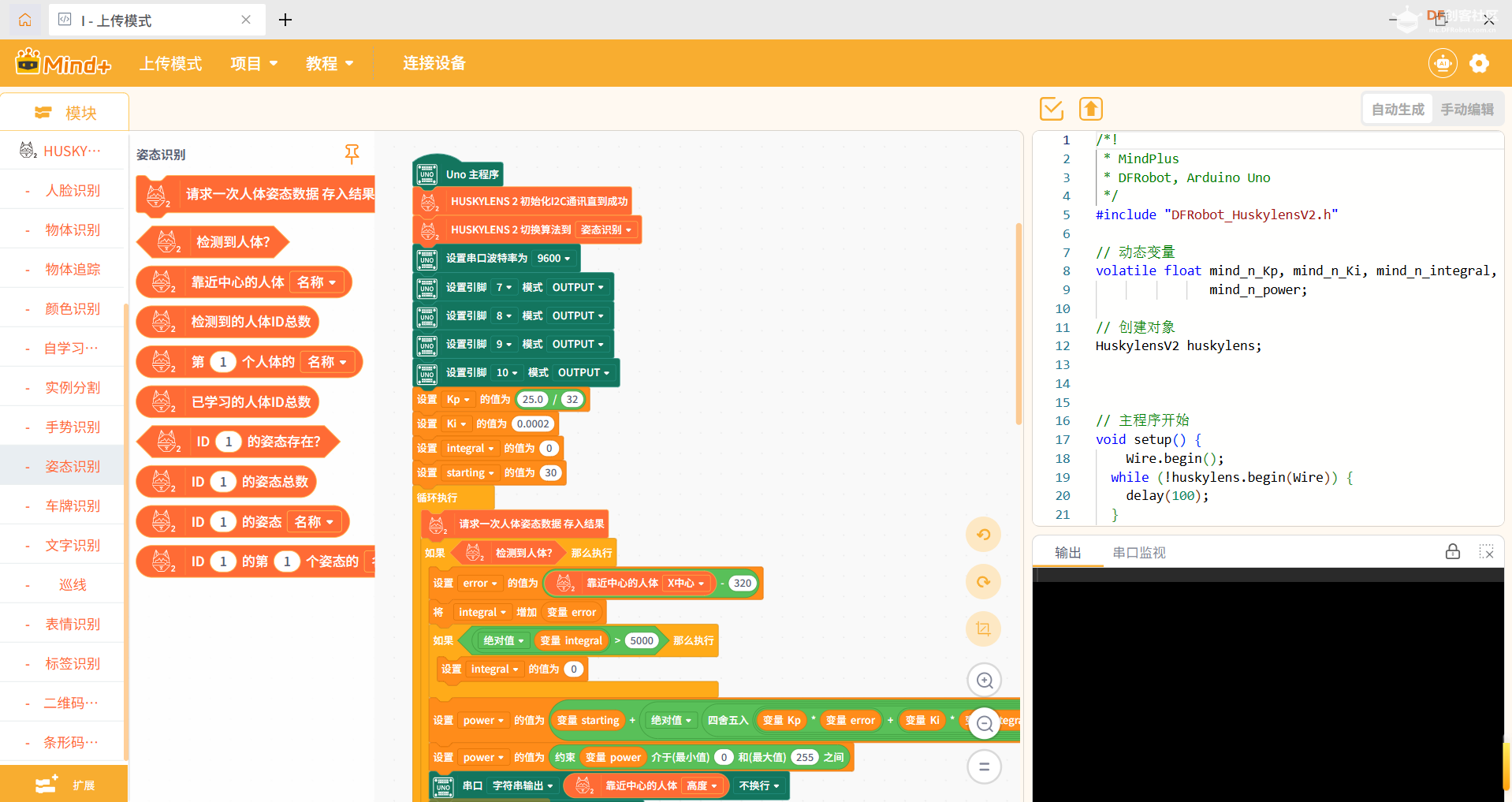  1. 误差定义 error = X_center – 320 取值范围:[0, 640] 2. 比例项 P Kp = 250 / 320 ≈ 0.78 Vp_turn = Kp × error 直接决定小车的“瞬时”转向力度。 3. 积分项 I integral = integral + error × dt (dt 在 Mind+ 主循环里近似为 20 ms) Ki 取 0.0002 (根据个人小车实际情况进行调整) Vi_turn = Ki × integral 作用:消除“差一点就正”的稳定误差,防止小车在目标前方左右摇摆。 4. 抗积分饱和 当 |integral| > 5000 时强制归零,避免电池低压或人为抱起小车时积分暴走。 5. 深度方向策略 当人体框高度 > 400 像素 或 宽度 > 300 像素,判定“过近”,原地待命; 仅执行转向,不前进。 否则,判定“过远”,直线前进; 【三阶段调试日志】 阶段一:三段区间 控制 - 代码:if(X<280) 左转; if(X>360) 右转; 否则刹车。 - 现象:小车像“磕头机”,左右猛拐,无法静止。 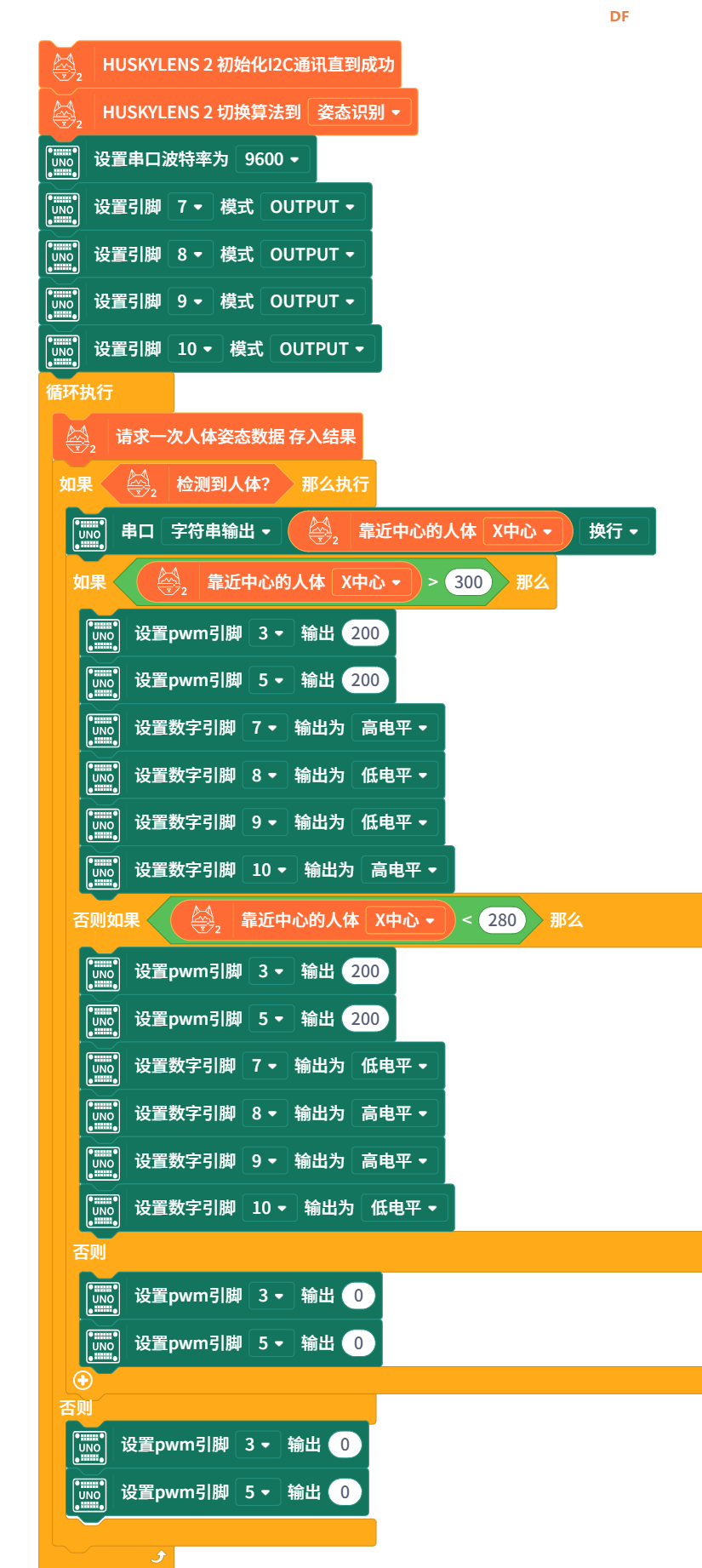 阶段二:纯比例 P - 现象:振荡幅度明显减小,但车头有可能始终偏离目标 10~15°,存在稳态误差。 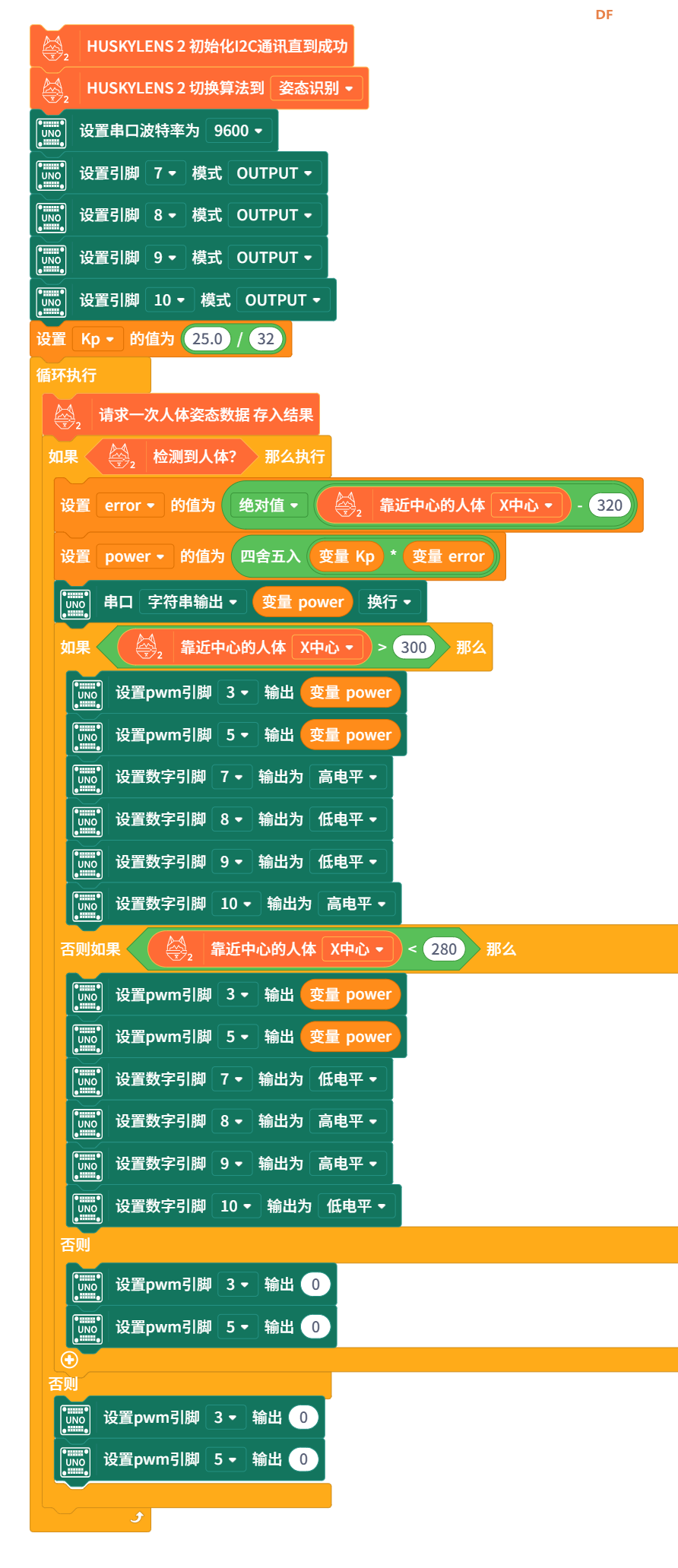 阶段三:PI 合击 - 加入积分项后,稳态误差在 3 s 内收敛到 ±2°,即使地面摩擦力不均也能保持“盯人”。 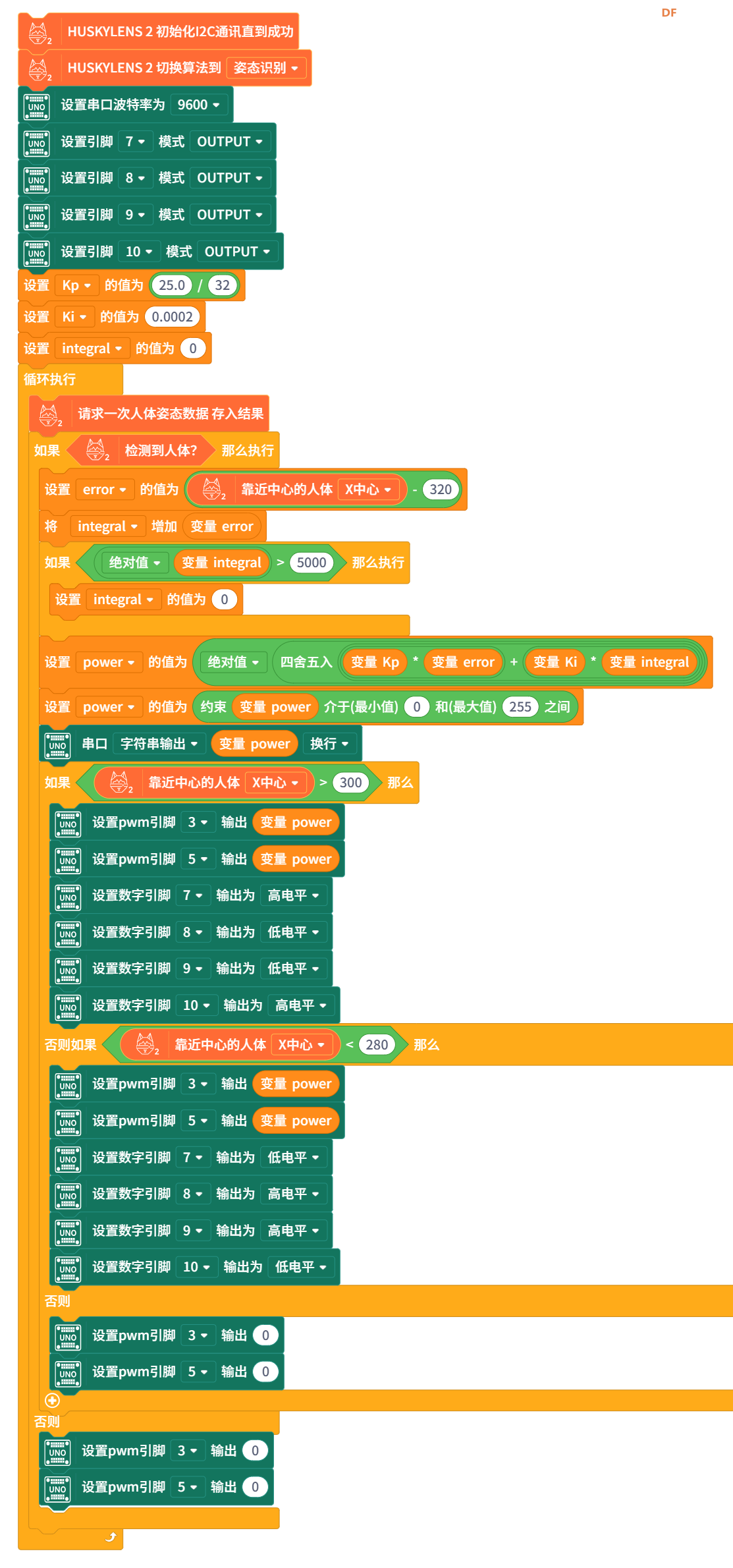 - 深度方向策略叠加后,小车在 1.5~3 m 范围内自动保持“社交距离”,人物后退它跟随,人物靠近它停止。 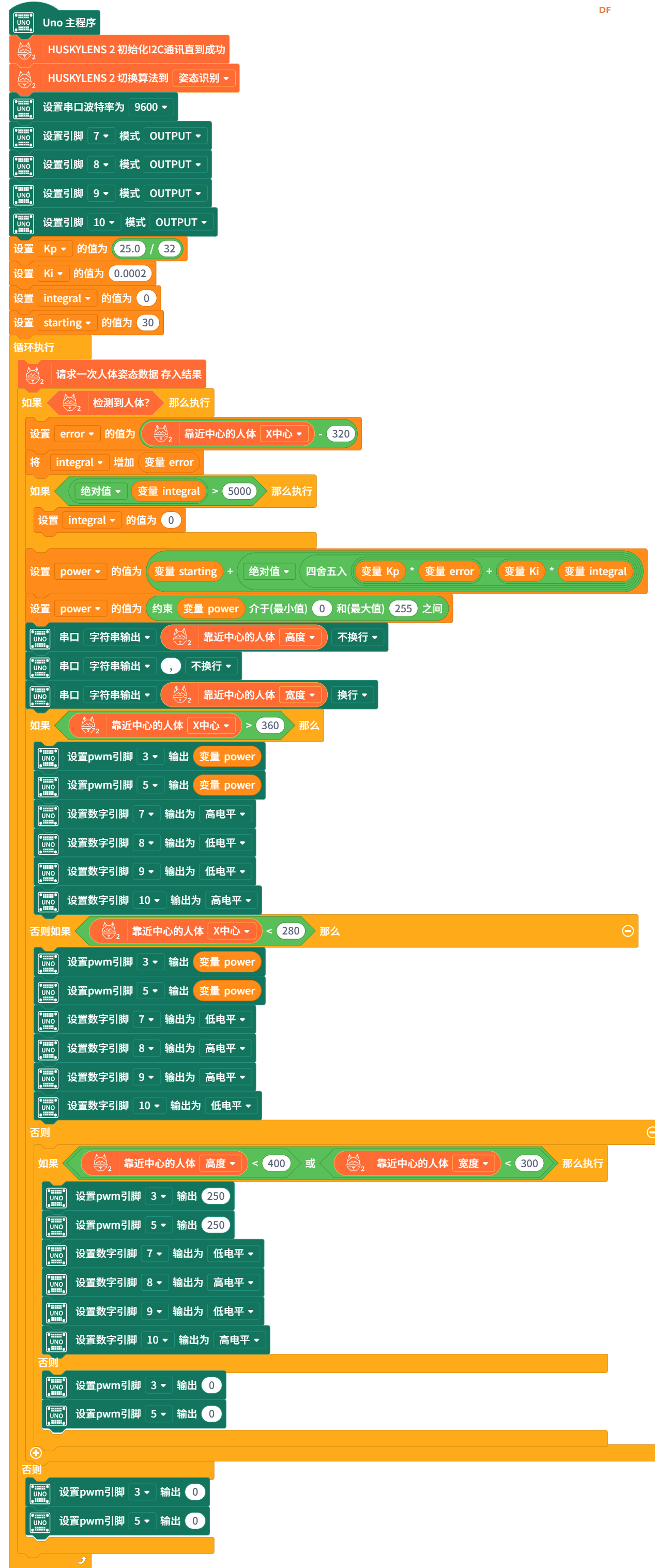 【关键参数整定表】 Kp = 0.78,Ki = 0.0002,采样周期 T ≈ 20 ms,积分限幅 ±5000,PWM 基速 30/255。 【常见问题 FAQ】 Q1. 电池电压掉到 6 V 以下,小车无力? A:L298N 的 5 V 逻辑端会随电池下降而降低,导致 HuskyLens 重启。务必给 Arduino UNO(HuskyLens2耗电)单独供电。 【成果展示】 通过“三段区间→P→PI”的递进调试,我们不仅得到了一辆会“咬人”的小履带车,更在 Mind+ 的可视化环境里把抽象的 PID 公式变成了肉眼可见的曲线。希望这篇文章能为正在做视觉跟随的同学提供一条“不踩坑”的捷径,也欢迎你把改进后的代码回传到社区,一起让小车“跟”得更稳、“跟”得更远! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






