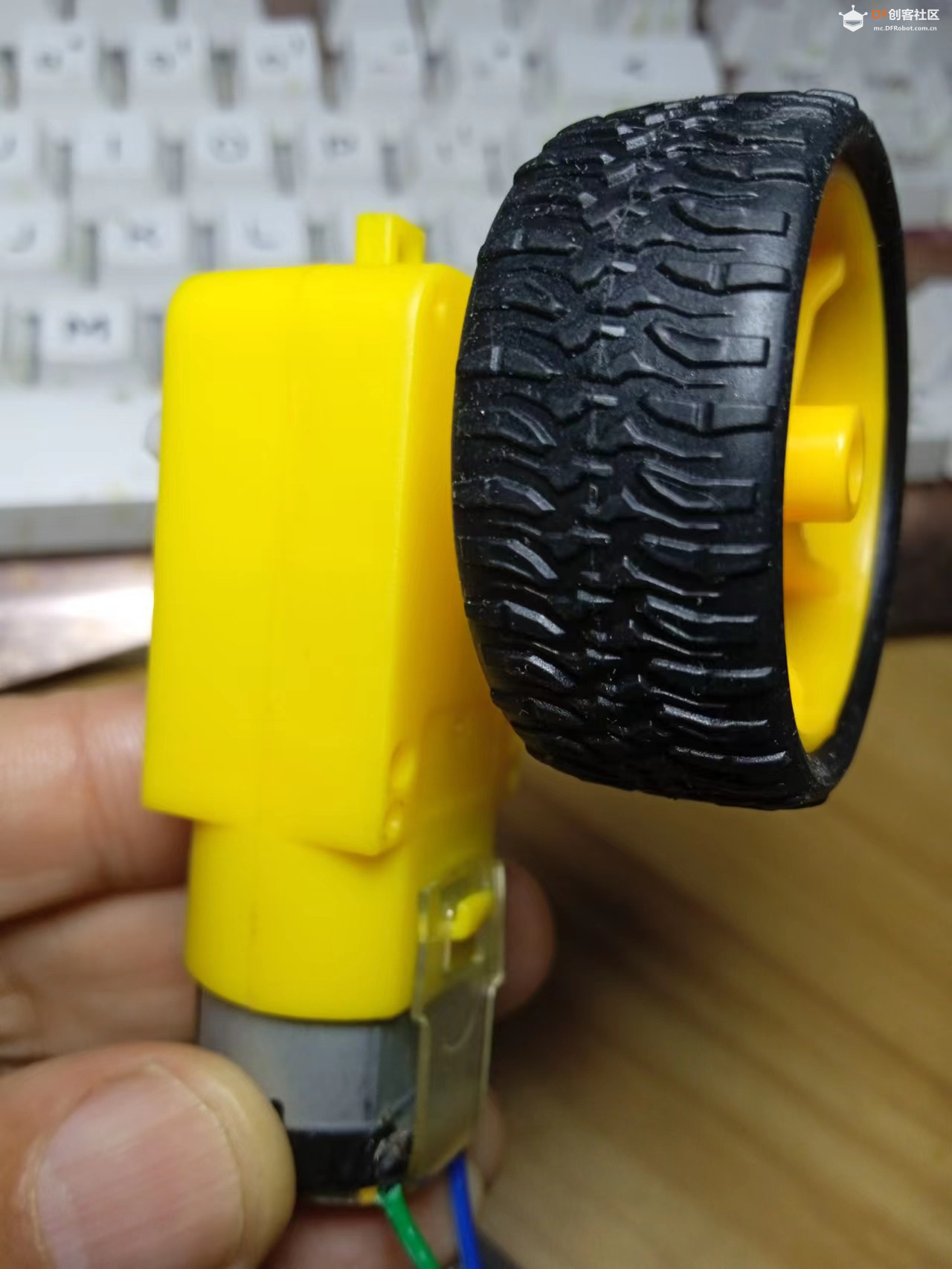
本例实验采用TT电机
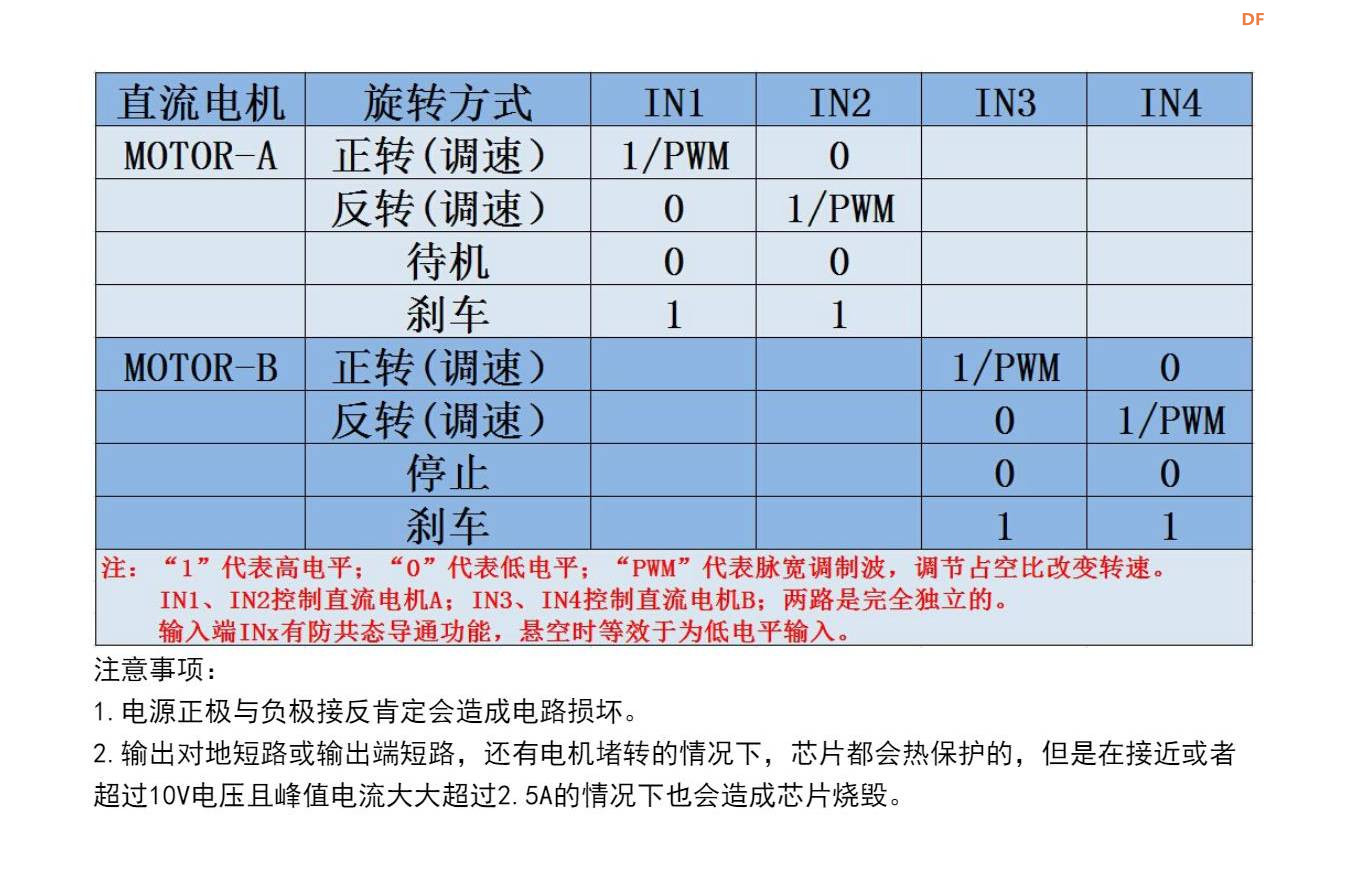
本例实验采用MX1508双路马达驱动模块
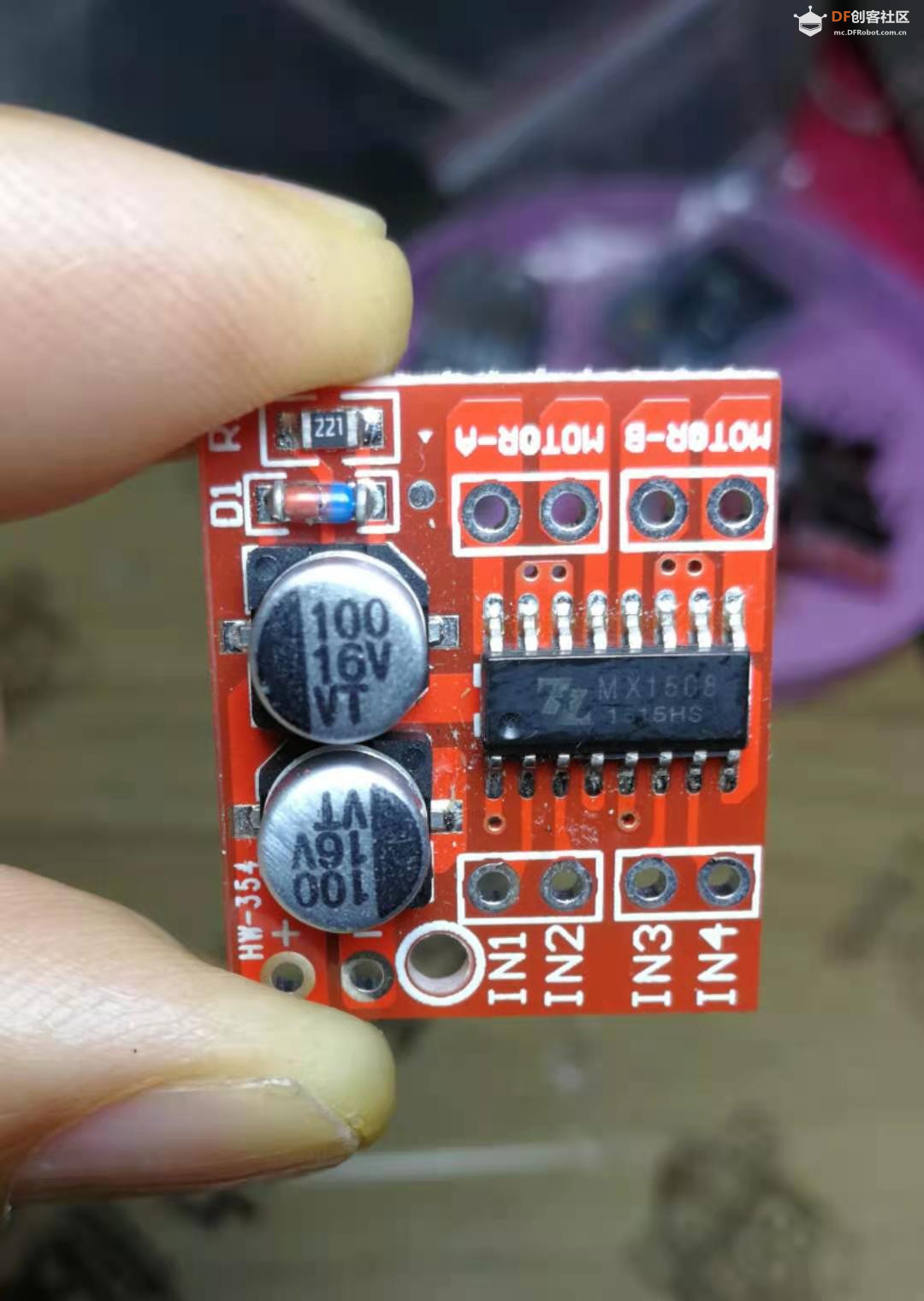

MX1508双路马达驱动模块主要参数
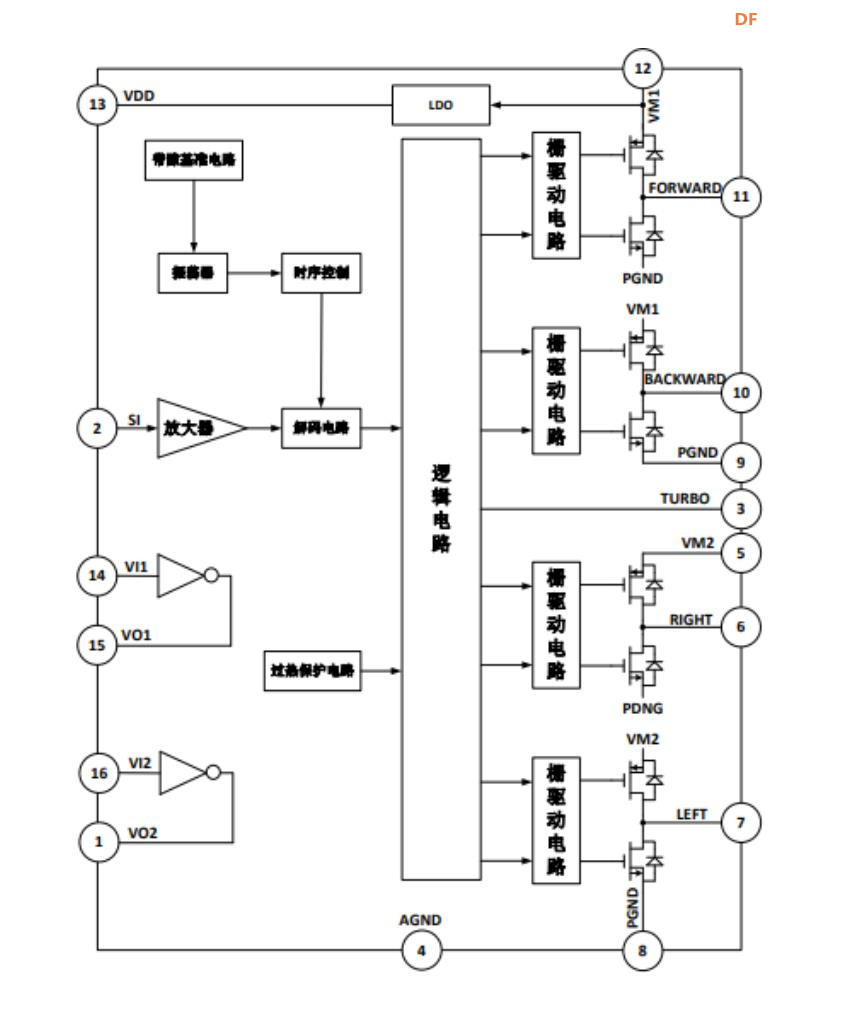
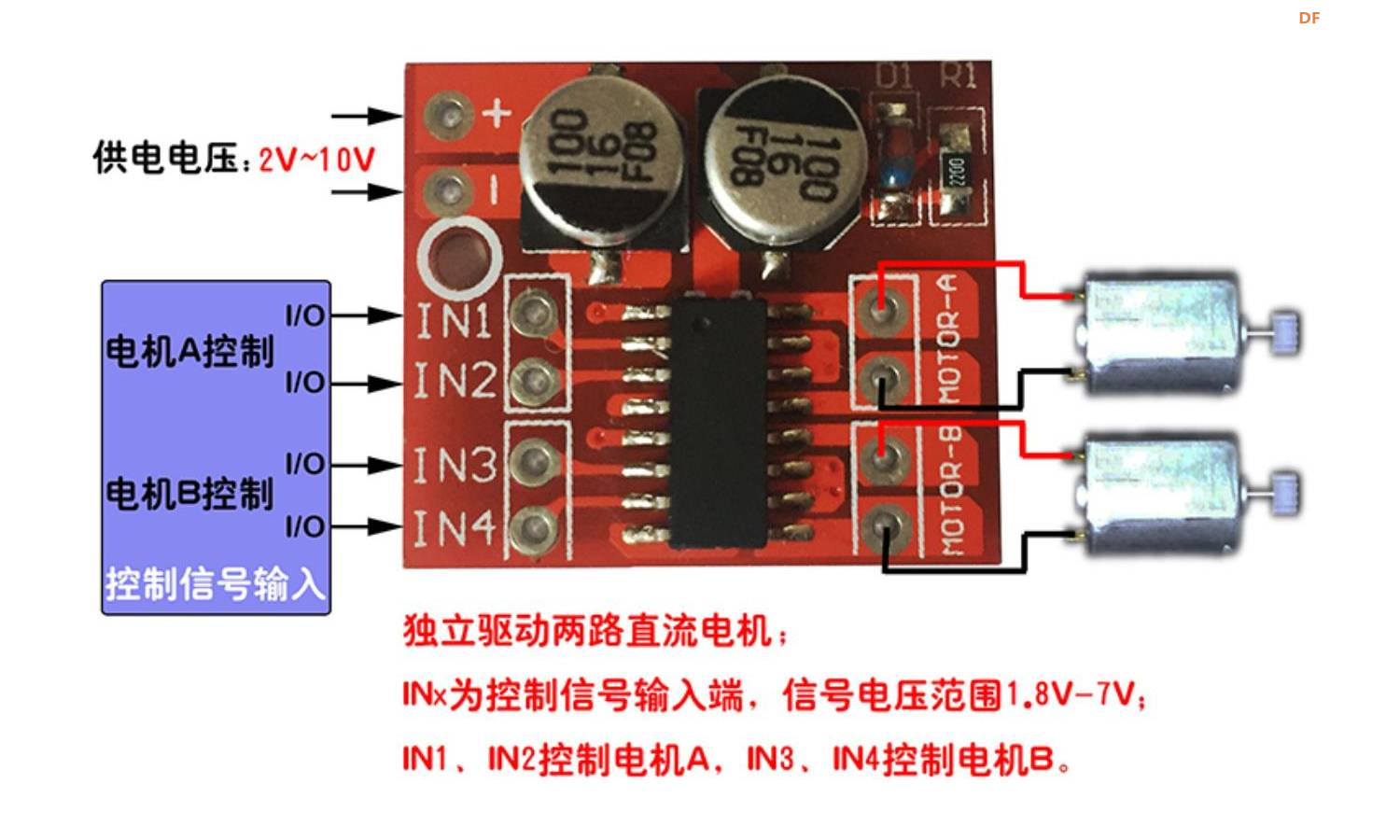
双路H桥电机驱动,可以同时驱动两路直流电机或者1个4线两相式步进电机;
模块供电电压2V-10V;
信号端输入电压1.8-7V;
单路工作电流1.5A,峰值电流可达2.5A,低待机电流 (小于 0.1uA);
内置防共态导通电路,输入端悬空时,电机不会误动作;
内置带迟滞效应的过热保护电路 (TSD),无需担心电机堵转;
产品尺寸: 24.7215mm (长宽高),超小体积,适合组装和车载;
安装孔直径:2 mm;
重量:5g 。
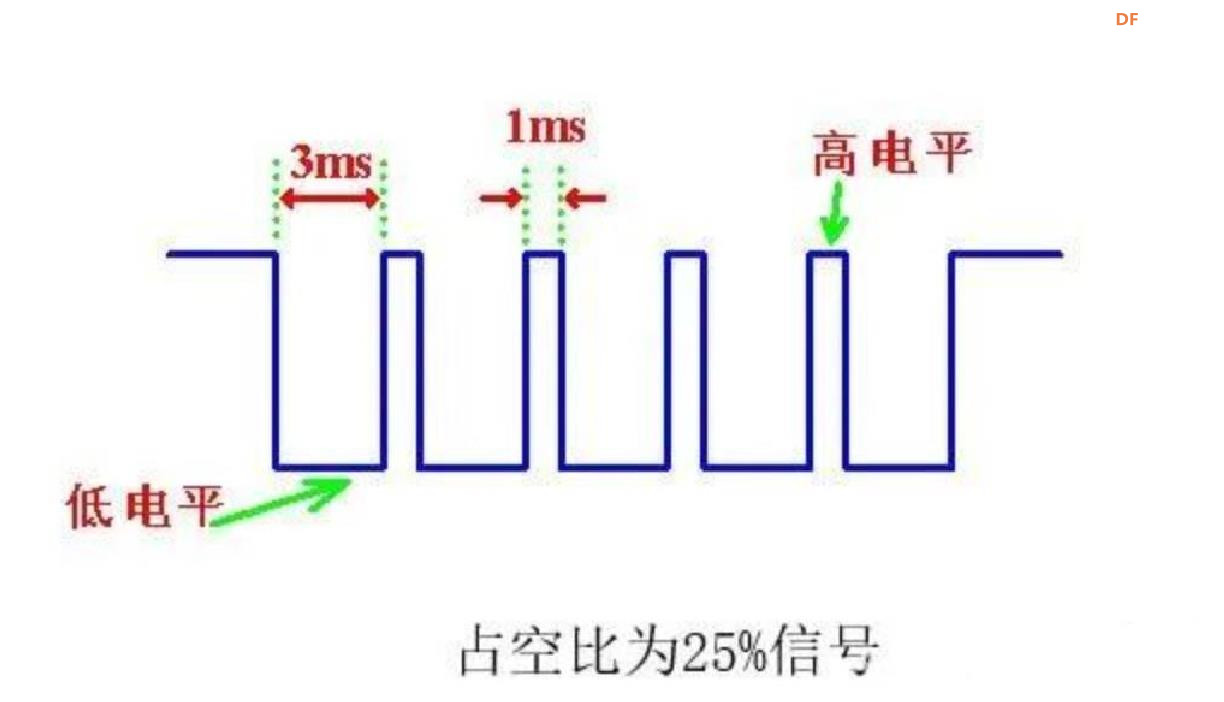
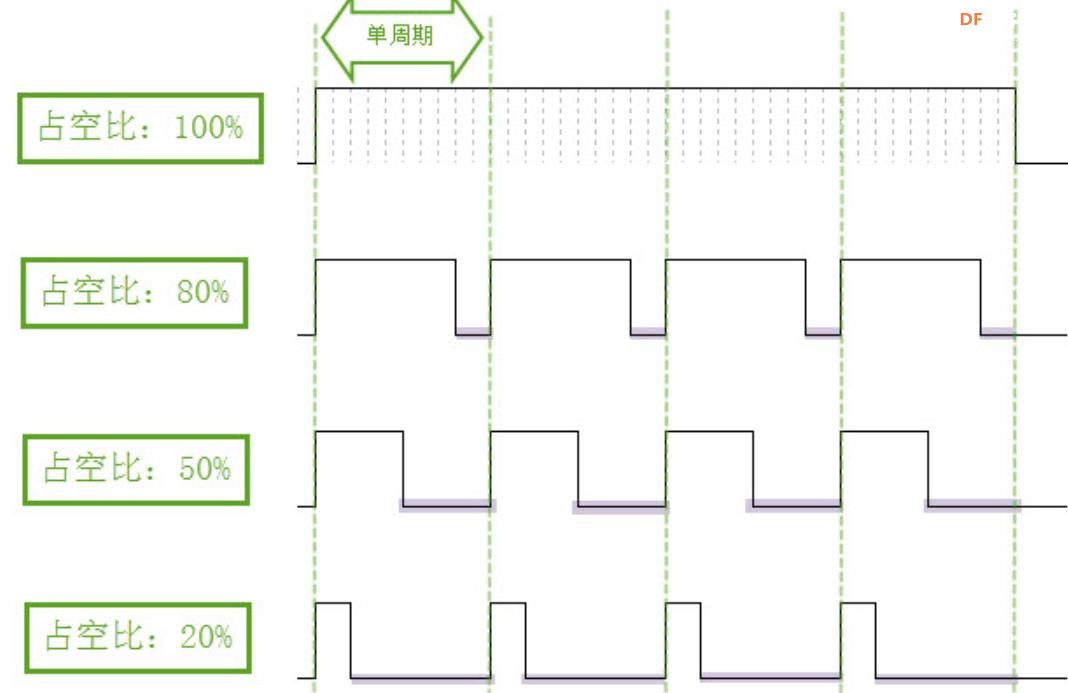
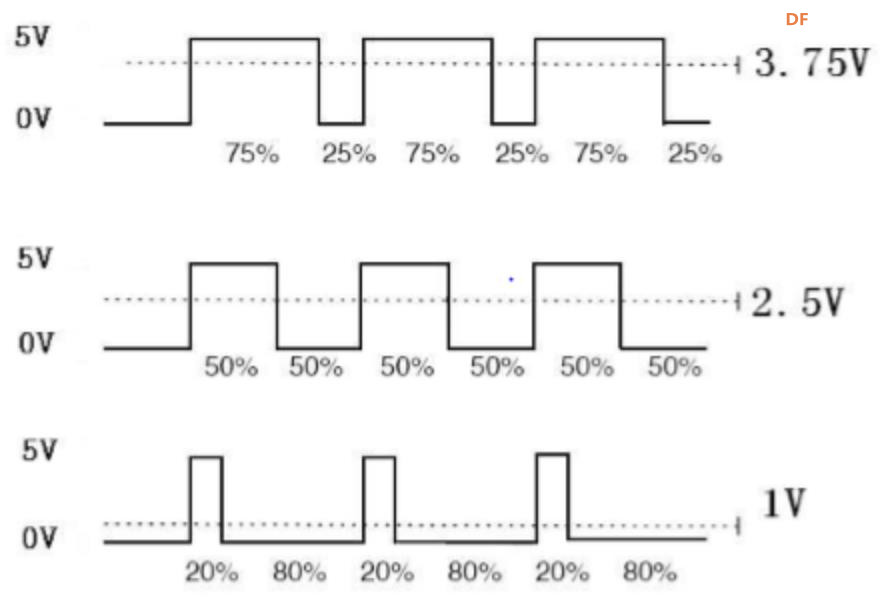
PWM控制电机原理
是一种利用微处理器的数字输出来对模拟电路进行控制的技术,通过调节脉冲宽度来控制输出电压或电流,从而实现对电机转速或转向的控制。PWM的频率是指在一秒钟内,信号从高电平到低电平再回到高电平的次数,占空比是指一个脉冲周期内,高电平的时间与整个周期时间的比例。占空比越大,所得到的平均电压也就越大,电机转速就高;占空比越小,所得到的平均电压也就越小,电机转速就低。PWM可以通过H桥电路来实现电机的正反转调速,H桥电路由四个功率电子开关构成,通过控制对角的两个电子开关导通,另外两个截止,可以改变电机两端的电源极性,从而改变电机的转向。PWM还可以通过不同的占空比来控制舵机的转角,舵机的频率一般为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围,来控制舵机不同的转角。
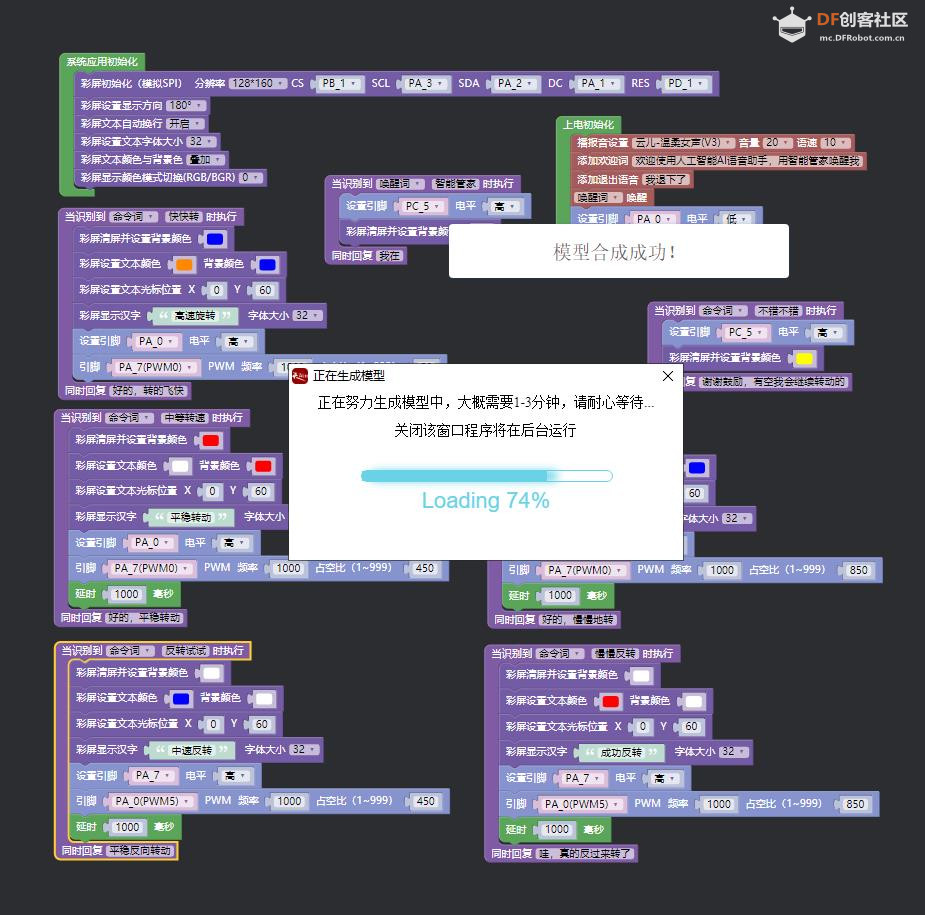
【花雕动手做】实验七十四:彩屏语音控制TT电机正反向多种速度旋转
实验开源代码
- #define ASC2_12
- #define ST7735_CS_PIN 9
- #define ST7735_CS_GPIO_PIN gpio_pin_1
- #define ST7735_DC_PIN 1
- #define ST7735_DC_GPIO_PIN gpio_pin_1
- #define ST7735_RST_PIN 25
- #define ST7735_RST_GPIO_PIN gpio_pin_1
- #define ST7735_SCK_PIN 3
- #define ST7735_SCK_GPIO_PIN gpio_pin_3
- #define ST7735_MOSI_PIN 2
- #define ST7735_MOSI_GPIO_PIN gpio_pin_2
- #define ASC2_32
- #define ST7735S_RGB_GBR_ORDER 0
-
- #include "asr.h"
- extern "C"{ void * __dso_handle = 0 ;}
- #include "setup.h"
- #include "myLib/asr_st7735.h"
- #include "myLib/asr_event.h"
-
- uint32_t snid;
- void hardware_init();
-
- SPITFT spi_tft(128, 160);
- //{ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"}
- //{ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"}
- //{ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"}
- void ASR_CODE()
- {
- //{ID:500,keyword:"唤醒词",ASR:"智能管家",ASRTO:"我在"}
- if(snid == 500){
- digital_write((21),1);
- spi_tft.clear((0x045F));
- }
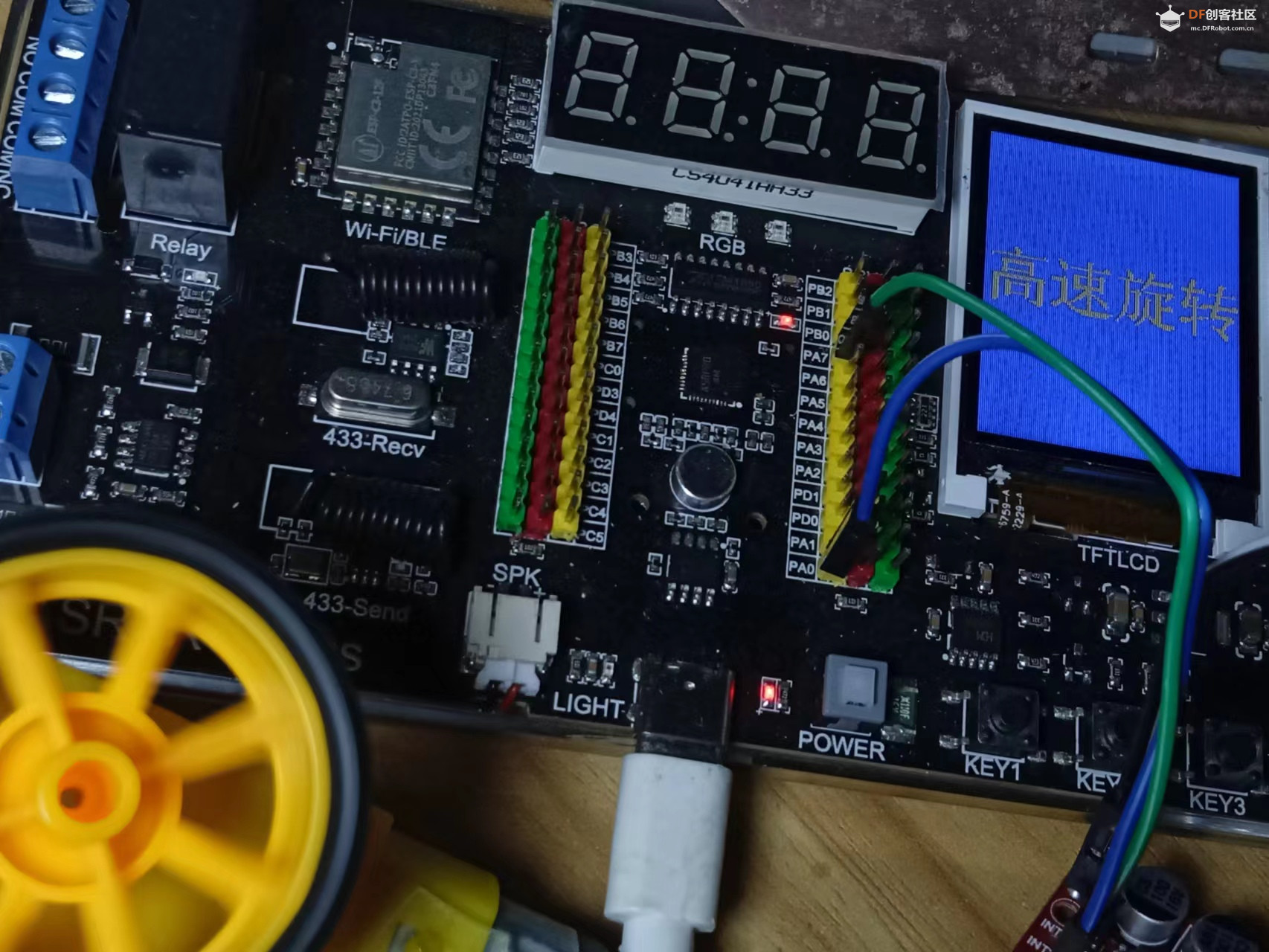
- //{ID:501,keyword:"命令词",ASR:"快快转",ASRTO:"好的,转的飞快"}
- if(snid == 501){
- spi_tft.clear((0x001F));
- spi_tft.set_text_color((0xFC40),(0x001F));
- spi_tft.set_cursor(0,60);
- spi_tft.draw_hanzi_32("高速旋转");
- digital_write((0),1);
- set_pwm((7),1000,50);
- }
- //{ID:502,keyword:"命令词",ASR:"不错不错",ASRTO:"谢谢鼓励,有空我会继续转动的"}
- if(snid == 502){
- digital_write((21),1);
- spi_tft.clear((0xFFE0));
- }
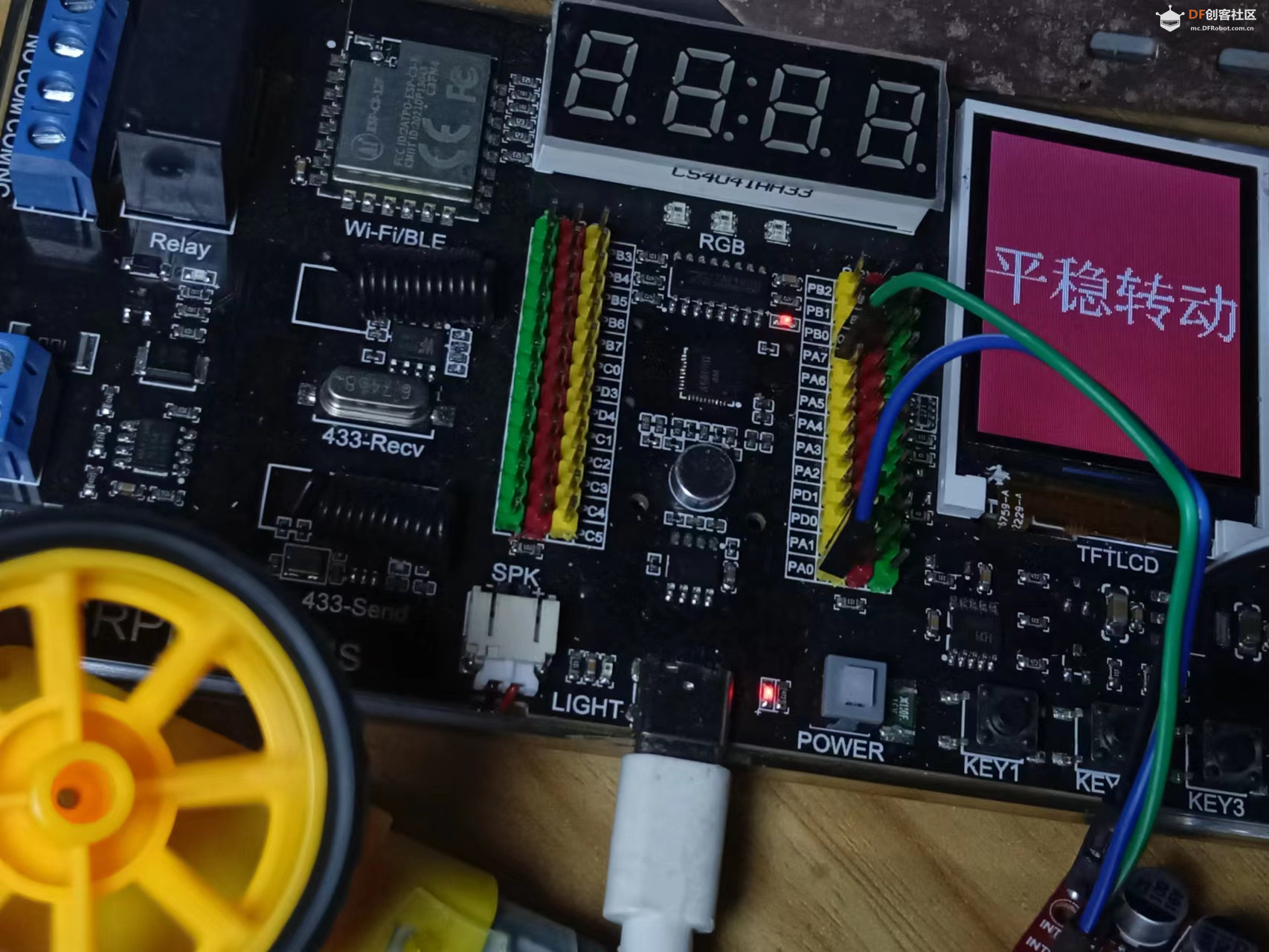
- //{ID:503,keyword:"命令词",ASR:"中等转速",ASRTO:"好的,平稳转动"}
- if(snid == 503){
- spi_tft.clear((0xF800));
- spi_tft.set_text_color((0xFFFF),(0xF800));
- spi_tft.set_cursor(0,60);
- spi_tft.draw_hanzi_32("平稳转动");
- digital_write((0),1);
- set_pwm((7),1000,450);
- delay(1000);
- }
- //{ID:504,keyword:"命令词",ASR:"慢点转",ASRTO:"好的,慢慢地转"}
- if(snid == 504){
- spi_tft.clear((0x001F));
- spi_tft.set_text_color((0xFFFF),(0x001F));
- spi_tft.set_cursor(0,60);
- spi_tft.draw_hanzi_32("缓慢地动");
- digital_write((0),1);
- set_pwm((7),1000,850);
- delay(1000);
- }
- //{ID:505,keyword:"命令词",ASR:"反转试试",ASRTO:"平稳反向转动"}
- if(snid == 505){
- spi_tft.clear((0xFFFF));
- spi_tft.set_text_color((0x001F),(0xFFFF));
- spi_tft.set_cursor(0,60);
- spi_tft.draw_hanzi_32("中速反转");
- digital_write((7),1);
- set_pwm((0),1000,450);
- delay(1000);
- }
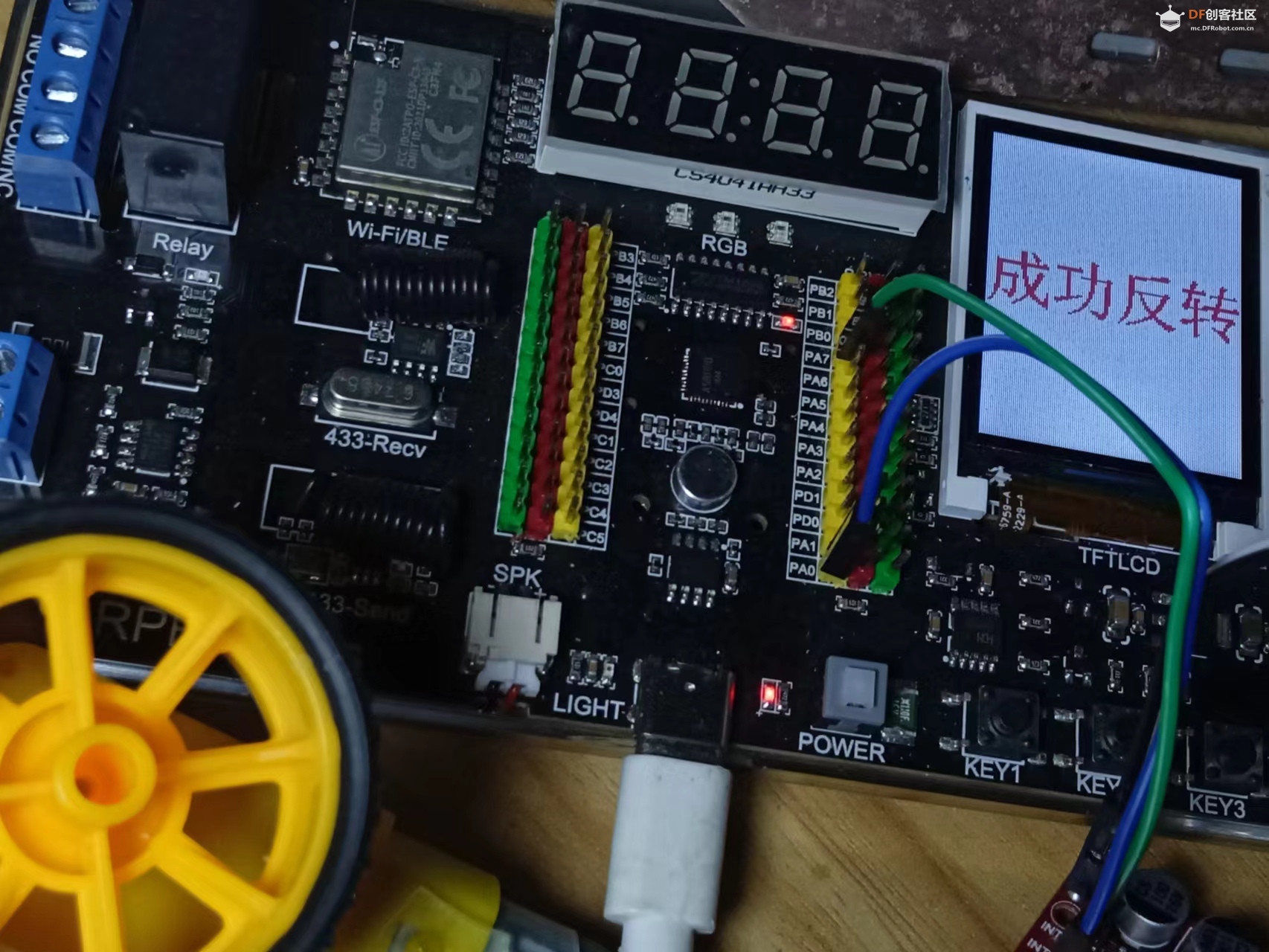
- //{ID:506,keyword:"命令词",ASR:"慢慢反转",ASRTO:"哇,真的反过来转了"}
- if(snid == 506){
- spi_tft.clear((0xFFFF));
- spi_tft.set_text_color((0xF800),(0xFFFF));
- spi_tft.set_cursor(0,60);
- spi_tft.draw_hanzi_32("成功反转");
- digital_write((7),1);
- set_pwm((0),1000,850);
- delay(1000);
- }
- }
-
- void hardware_init(){
- spi_tft.init();
- spi_tft.set_direction(2);
- spi_tft.set_text_wrap(true);
- spi_tft.set_text_size(32);
- spi_tft.set_bg_mode(1);
- vTaskDelete(NULL);
- }
-
- void setup()
- {
- //{speak:云儿-温柔女声,vol:20,speed:10,platform:haohaodada,version:V3}
- //{playid:10001,voice:欢迎使用人工智能AI语音助手,用智能管家唤醒我}
- //{playid:10002,voice:我退下了}
- digital_write((0),0);
- digital_write((4),0);
- xTaskCreate(hardware_init,"hardware_init",256,NULL,100,NULL);
- }
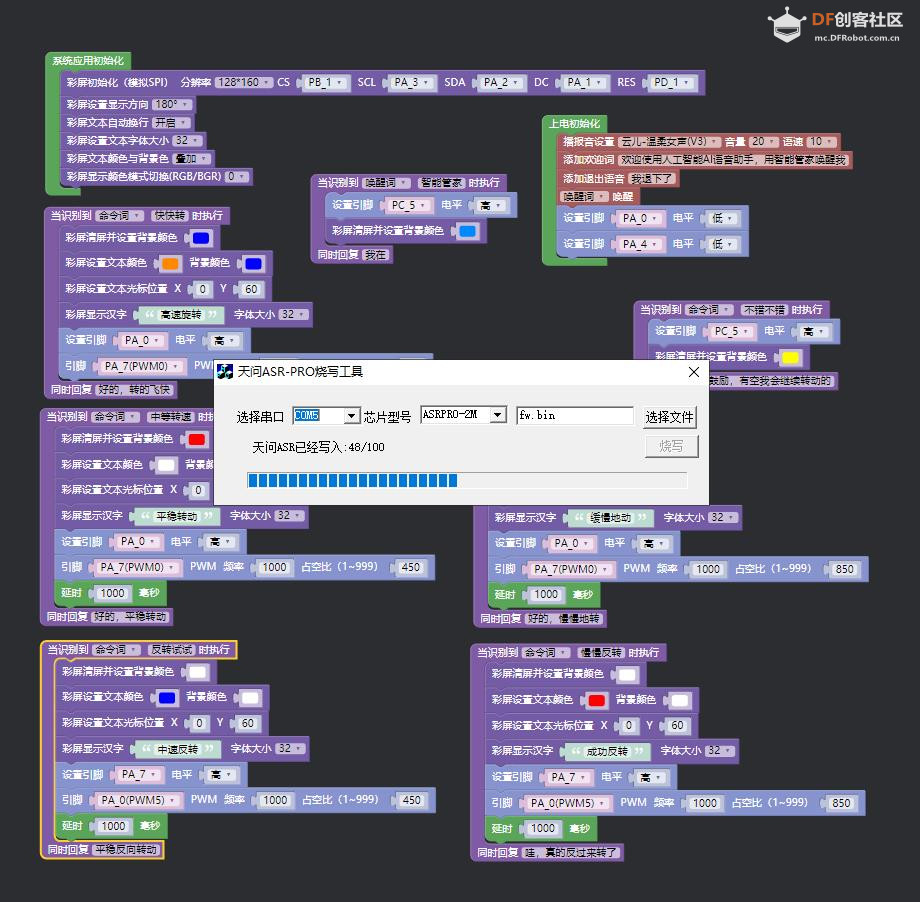
生成模型与编译烧录
实验记录视频
https://www.bilibili.com/video/BV19x4y1C7q3/?share_source=copy_web&vd_source=371a292a55e5ca9be994cbb4a86cc987
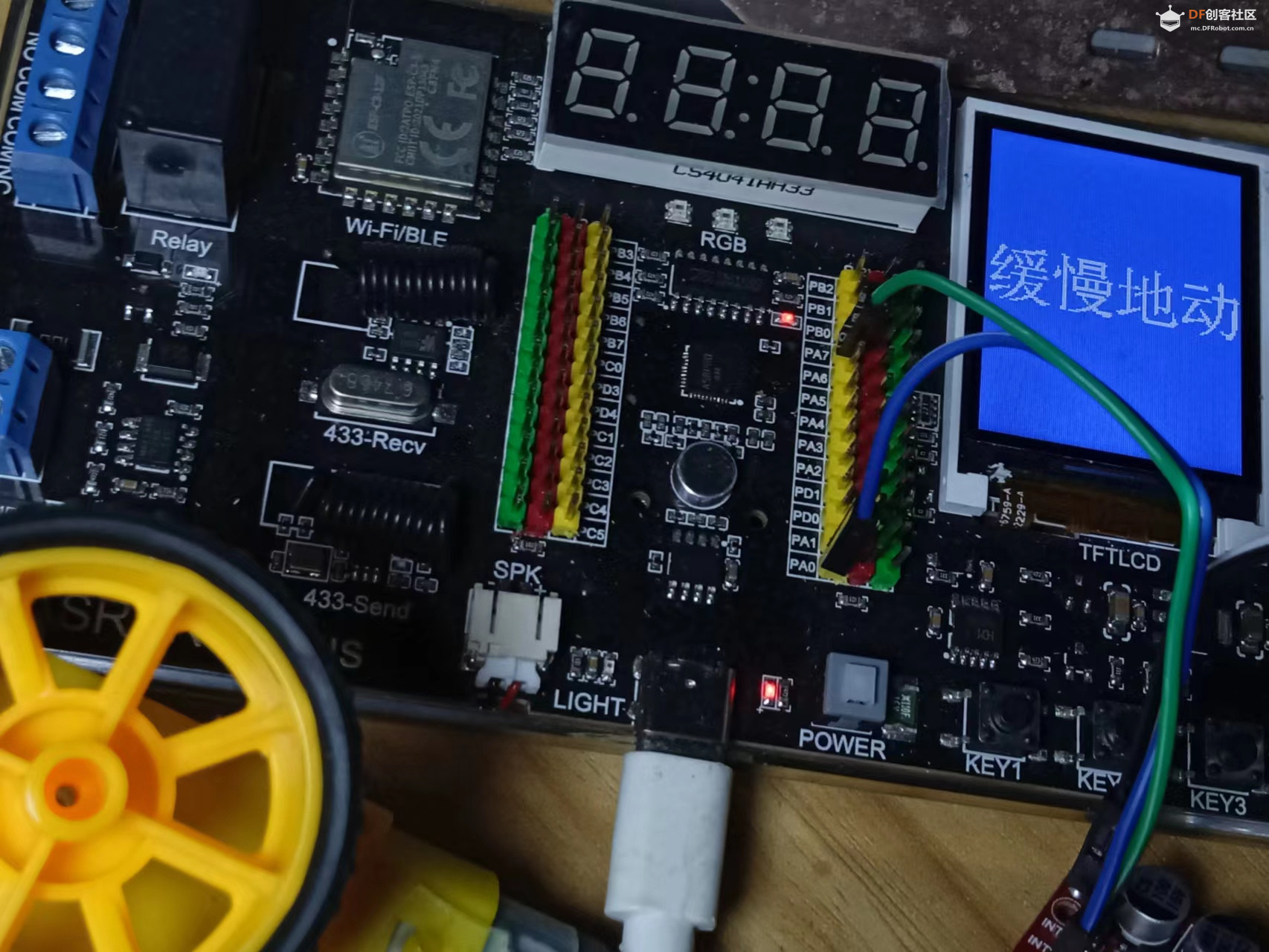
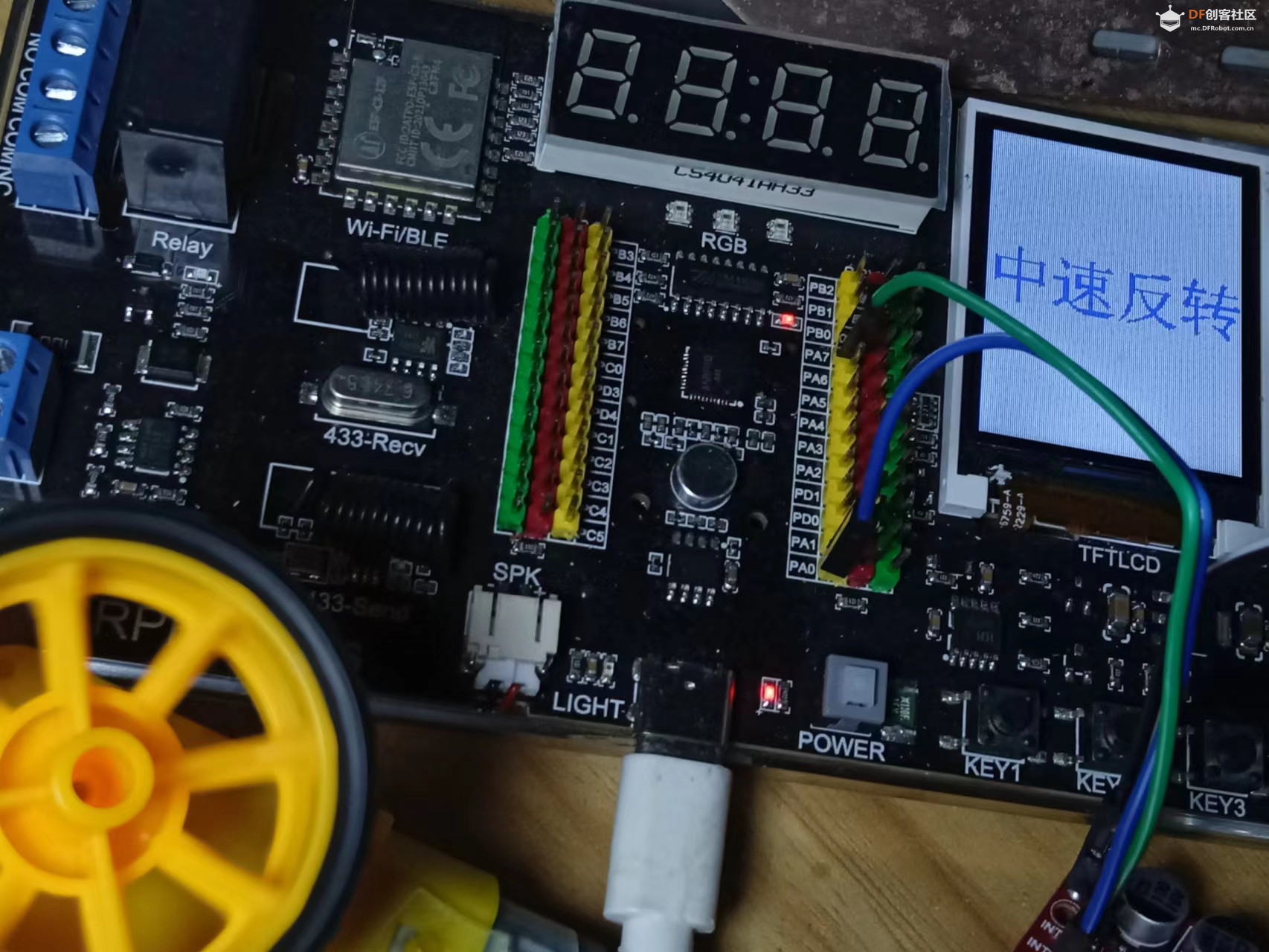
实验场景图
|



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






