|
4266| 40
|
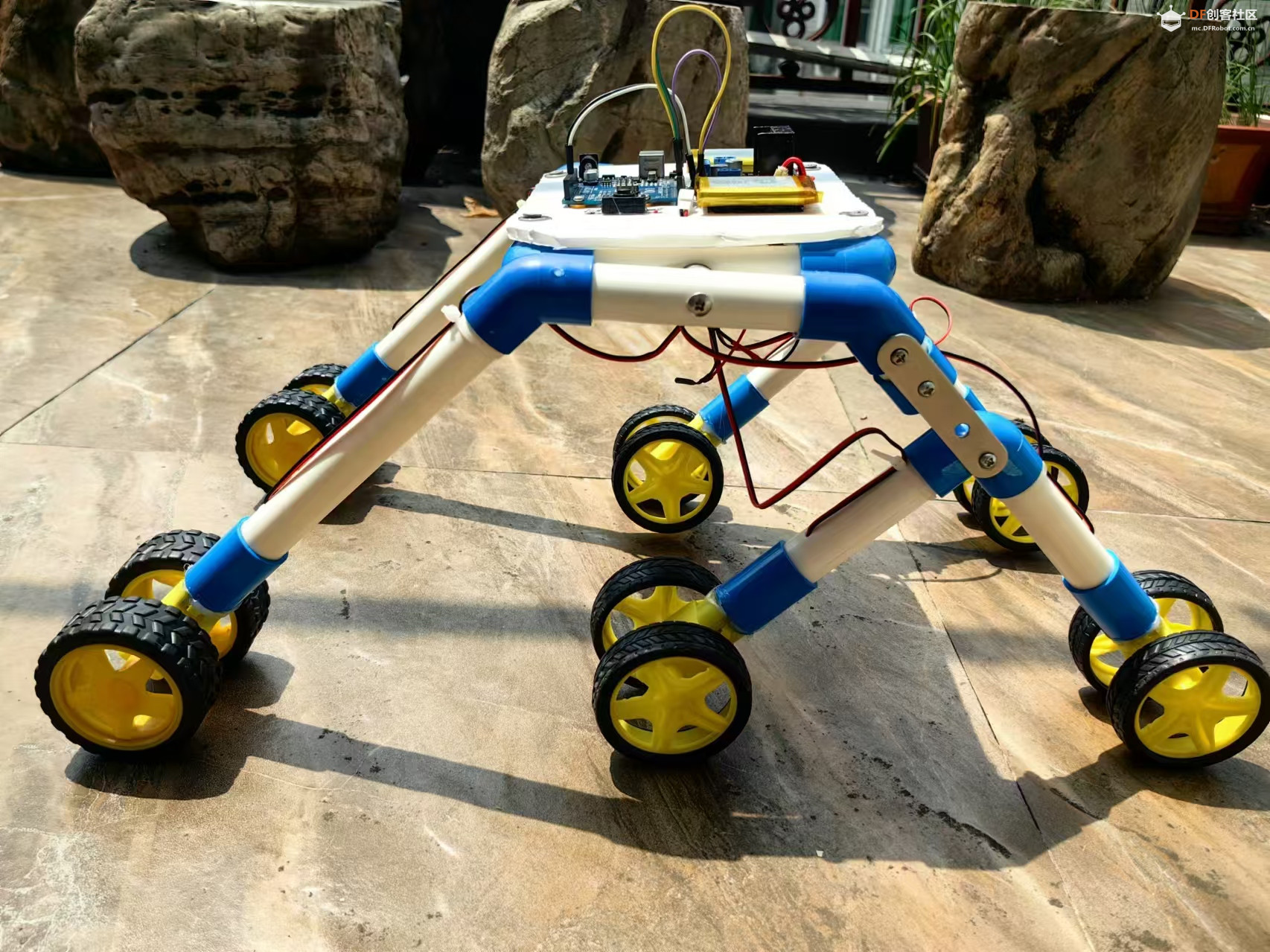
[项目] 【花雕学编程】Arduino动手做(228)---2米PVC水管火星车 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十八:2米PVC水管六个TT马达驱动火星车 项目实验之十一:设置火星车简易蓝牙控制面板,前后左右停止 实验开源代码 |
|
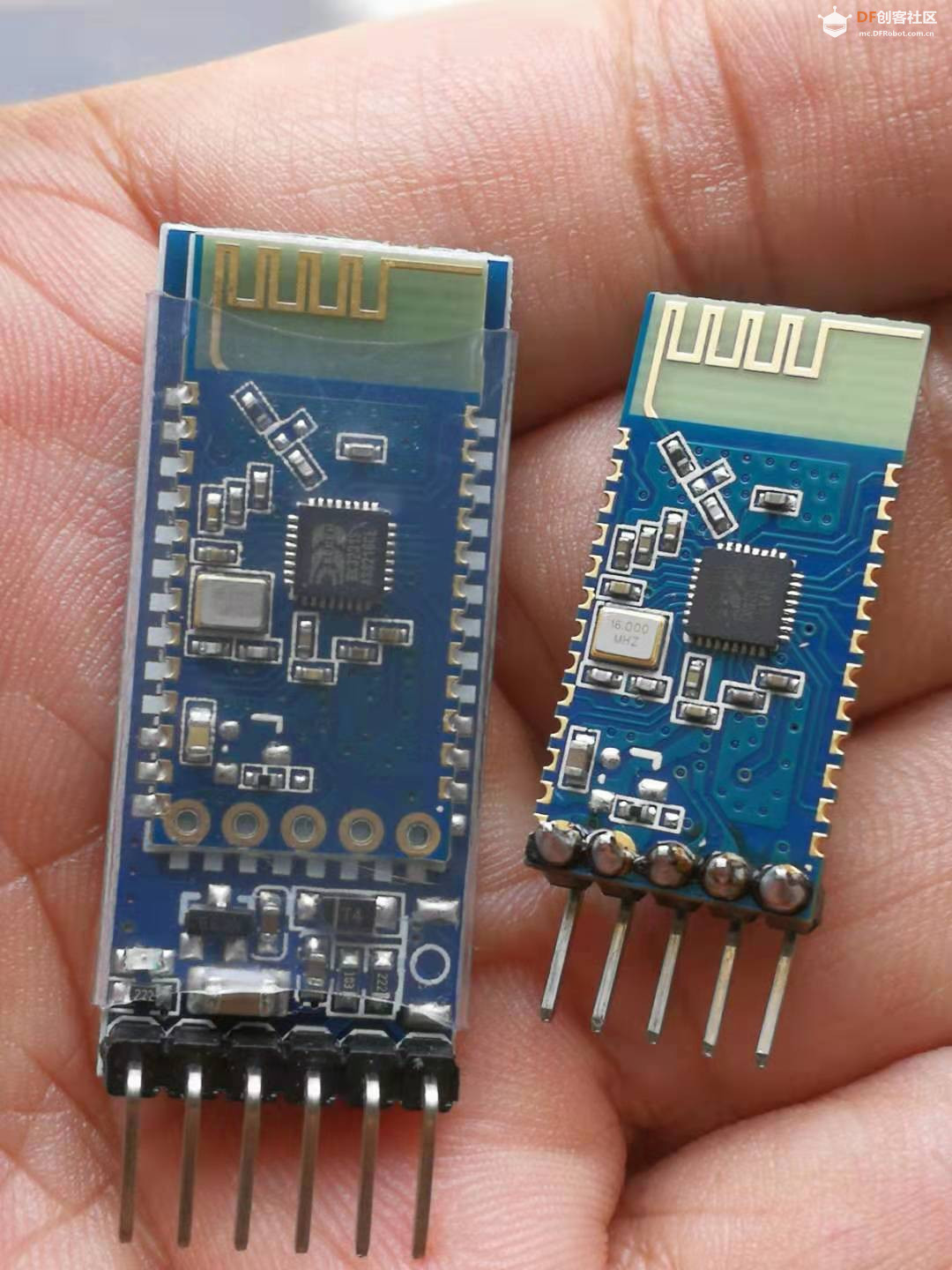
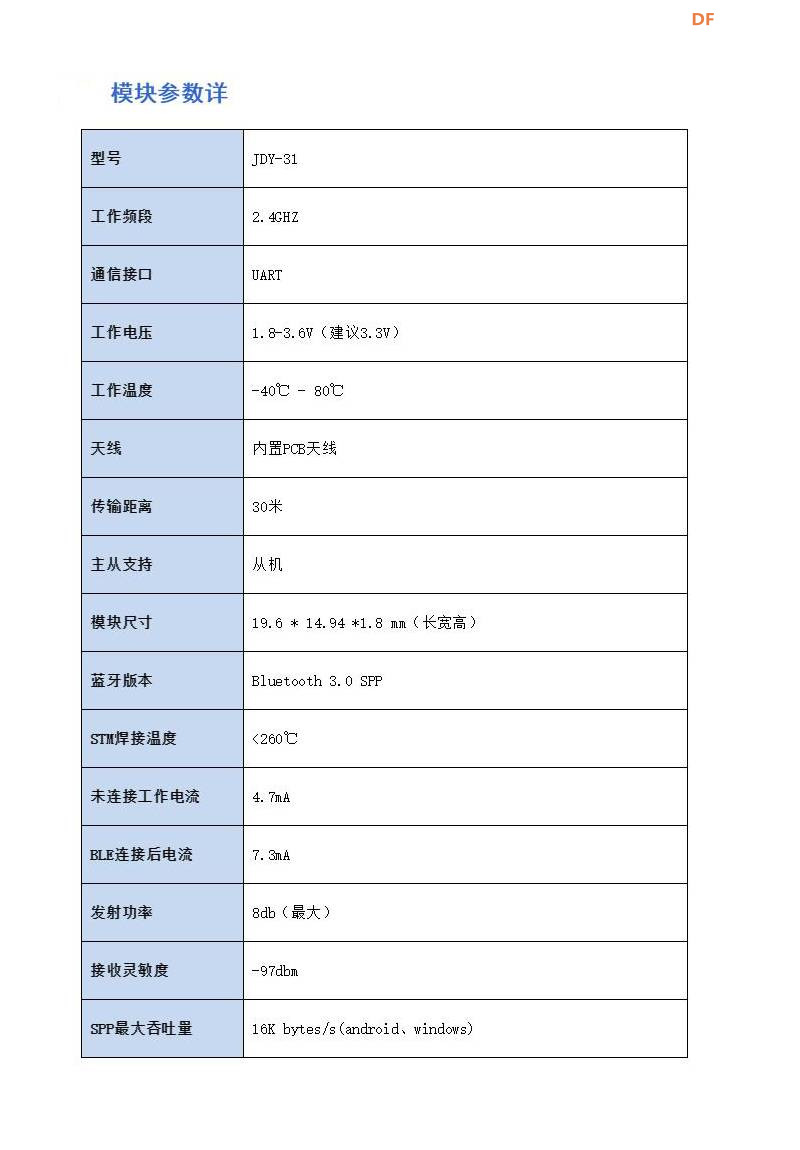
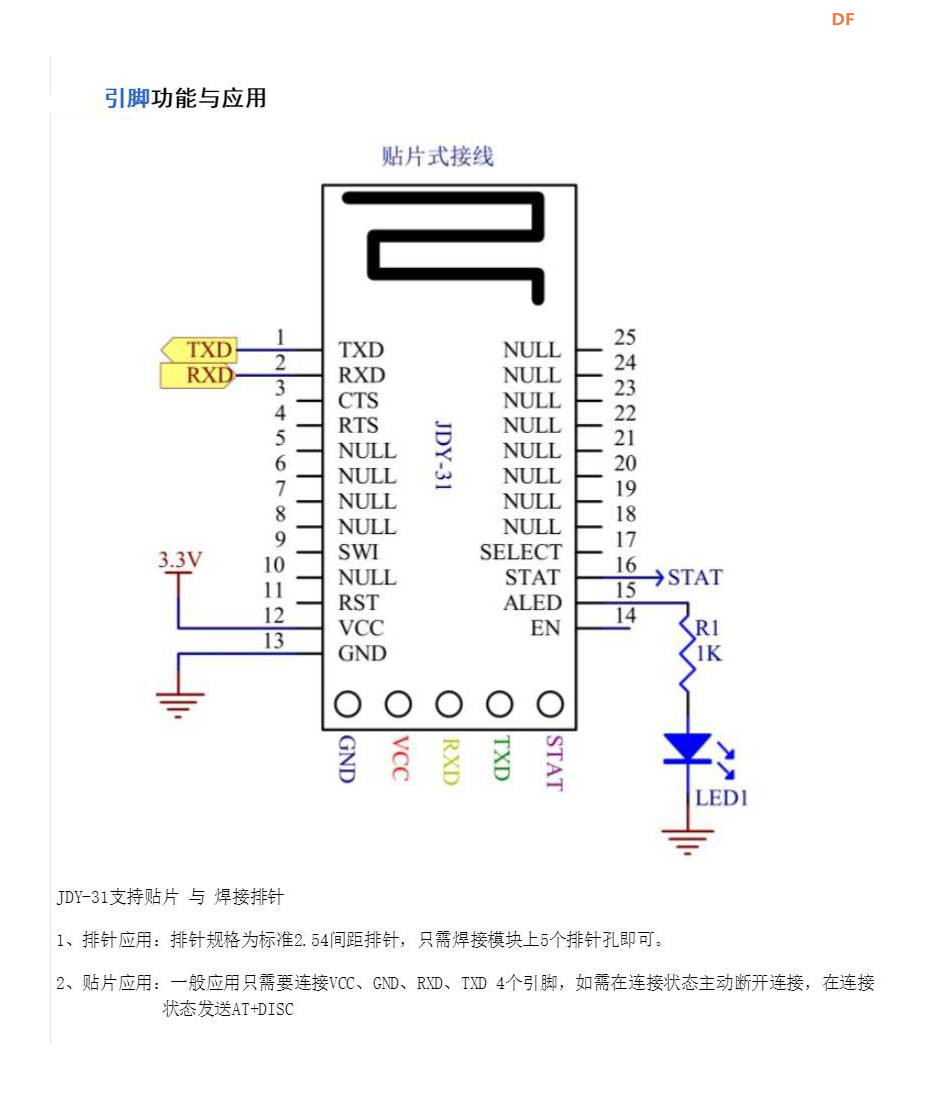
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十八:2米PVC水管六个TT马达驱动火星车 项目实验之八:通过JDY-31蓝牙模块串口字符来控制火星车 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十八:2米PVC水管六个TT马达驱动火星车 项目实验之四:不使用库,详细控制火星车的多种速度变化 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十八:2米PVC水管六个TT马达驱动火星车 项目实验之一:火星车的前进、后退与转向 实验开源代码 |
|
本帖最后由 驴友花雕 于 2024-8-29 19:45 编辑 实验串口返回情况  要点解读 1、结构简化:将电机的方向和速度控制封装到函数中,减少重复代码,提高可读性。 2、灵活性增强:通过传递电机对象和引脚参数,使代码更具通用性和灵活性。 3、逻辑清晰:将电机方向和速度控制逻辑分离,使代码更易于理解和维护。 4、平滑速度变化:通过逐步增加或减少速度,实现电机速度的平滑变化,减少机械冲击。 5、延迟控制:使用delay()函数控制速度变化的步进时间,确保每个动作有足够的时间完成。 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十八:2米PVC水管六个TT马达驱动火星车 项目实验之五:启动火星车,控制方向逐渐减少增加电机速度 实验开源代码 |
|
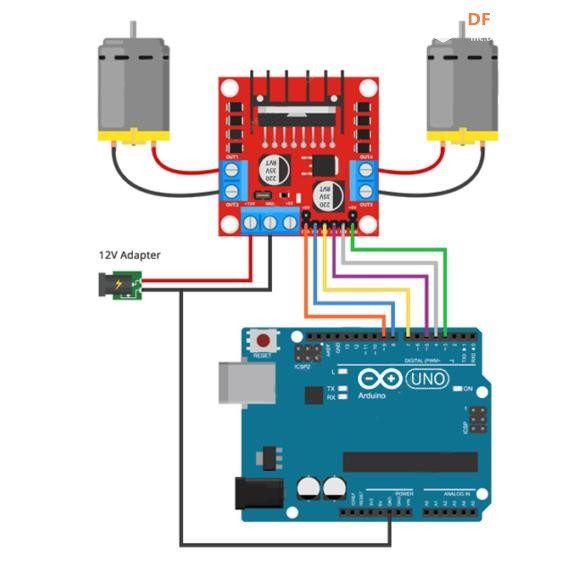
代码要点解读 1、引脚定义:定义了电机A和电机B的PWM和方向控制引脚。 2、引脚初始化:在setup()函数中,将所有引脚设置为输出模式,并初始化为低电平。 3、方向控制:在directionControl()函数中,通过设置方向引脚的高低电平来控制电机的旋转方向,并通过PWM信号控制速度。 4、速度控制:在speedControl()函数中,通过逐步增加和减少PWM信号,实现电机速度的平滑变化。 5、延迟控制:使用delay()函数控制电机动作的持续时间,确保每个动作有足够的时间完成。  |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十八:2米PVC水管六个TT马达驱动火星车 项目实验之六:JDY-31蓝牙模块从模式与Arduino的回环测试 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






