|
793| 5
|
[项目] 【花雕动手做】拆解机器人底盘 DDSM400 强磁伺服轮毂电机 |
|
做小型高精度全向机器人底盘,想找一款 “省心又能打” 的动力核心?DDSM400 钕强磁外转子 65mm 伺服轮毂电机 绝对是优选——它把无刷电机、FOC 伺服驱动、高精度编码器集成一体,钕强磁加持、外转子直驱设计,不用额外搭配驱动板,直接装轮就能用,是麦克纳姆轮底盘的 “一体化动力神器”。 但很多创客只知道它好用,却不清楚内部构造:钕强磁转子藏着怎样的动力秘密?伺服驱动和编码器是如何实现精准控制的?外转子直驱为什么能做到零背隙、低噪音? 这里,就完整拆解这款 DDSM400 伺服轮毂电机,从外到内拆解核心部件,解析它的结构优势与工作逻辑,帮你真正看懂这款 “一体化伺服电机”,以后选型、改装、调试机器人底盘,都能心里有底、少走弯路。   |
|
本帖最后由 驴友花雕 于 2026-3-1 08:52 编辑 DDSM400 伺服轮毂电机・简单拆解步骤 1、拧下轮毂固定螺丝用内六角扳手卸下电机外圈的固定螺丝,分离轮毂外壳与端盖。 2、取出外转子与强磁体轻轻取下外转子总成,内部可见一圈钕铁硼强磁,注意磁力较大,轻拿轻放。 3、分离定子与线圈组件露出中心定子部分,包含三相绕组线圈,这是电机的动力核心。 4、取下编码器与伺服驱动板从电机尾部拆下内置编码器磁环与 FOC 驱动电路板,这是实现精准伺服控制的关键。 5、检查轴承与中心轴最后观察中心固定轴与双轴承结构,确认顺滑度与结构强度。  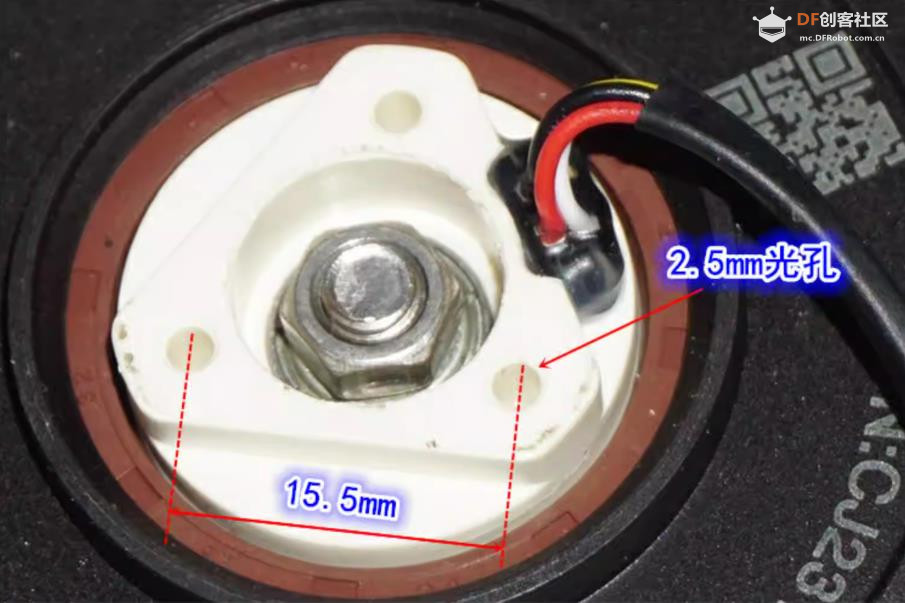     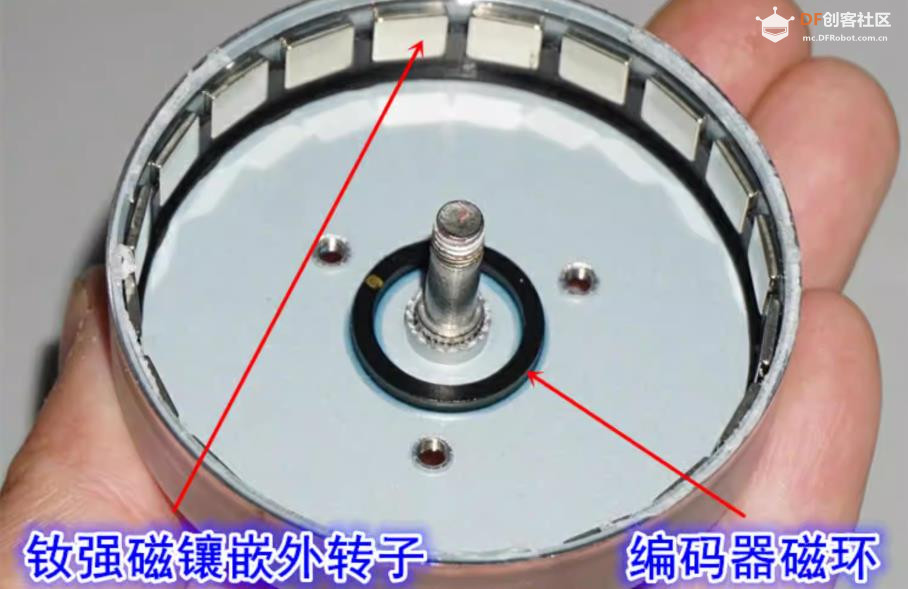 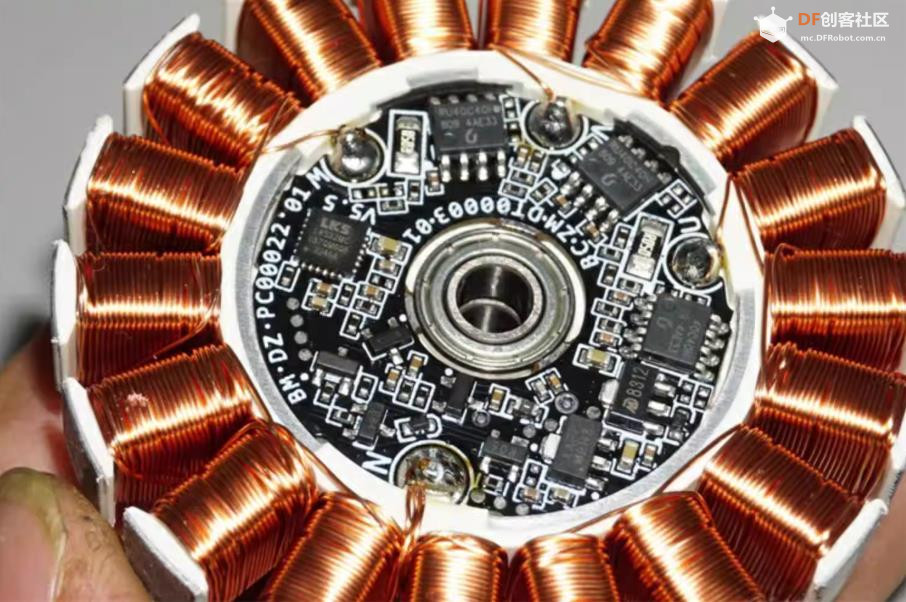 |
|
拆解 DDSM400 伺服轮毂电机后,能清晰看到其 “一体化伺服” 的核心结构,各部件协同工作,才实现了精准、静音、高效的动力输出,适配机器人底盘需求,原理小结如下: DDSM400 核心由五大关键部件组成,分工明确、协同发力:外转子(包裹一圈钕铁硼强磁)为动力输出端,通电后在定子三相线圈产生的磁场作用下高速转动,钕强磁的高磁力的特性,让电机同体积下扭矩更大、发热更低;中心轴与双轴承结构,保证外转子转动顺滑、无卡顿,同时支撑整个电机与轮毂的重量;尾部的编码器(带磁环)实时检测转子位置与转速,将信号反馈给内置的 FOC 伺服驱动板;驱动板接收指令后,通过 FOC 算法精准调节线圈电流,实现转速、方向的闭环控制,达成伺服电机的高精度特性。 整体采用外转子直驱设计,无减速箱、无齿轮间隙,既减少了噪音,又提升了响应速度(毫秒级),搭配一体化集成设计(电机 + 驱动 + 编码器),无需额外外接驱动模块,直接接线就能驱动麦克纳姆轮,这也是它适配小型高精度全向机器人底盘的核心优势。  |
|
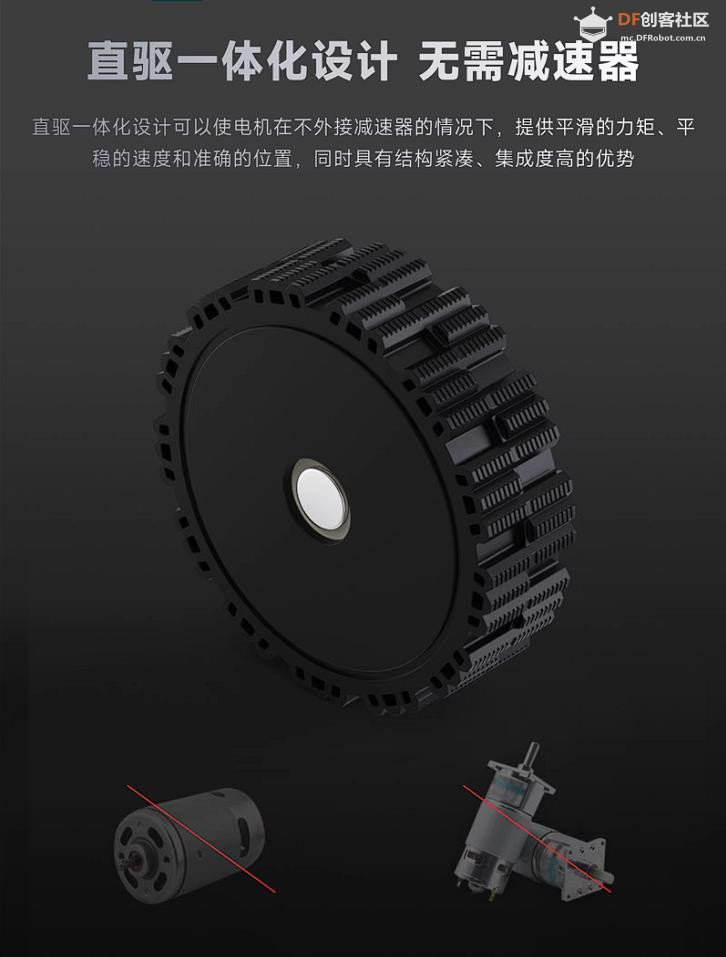
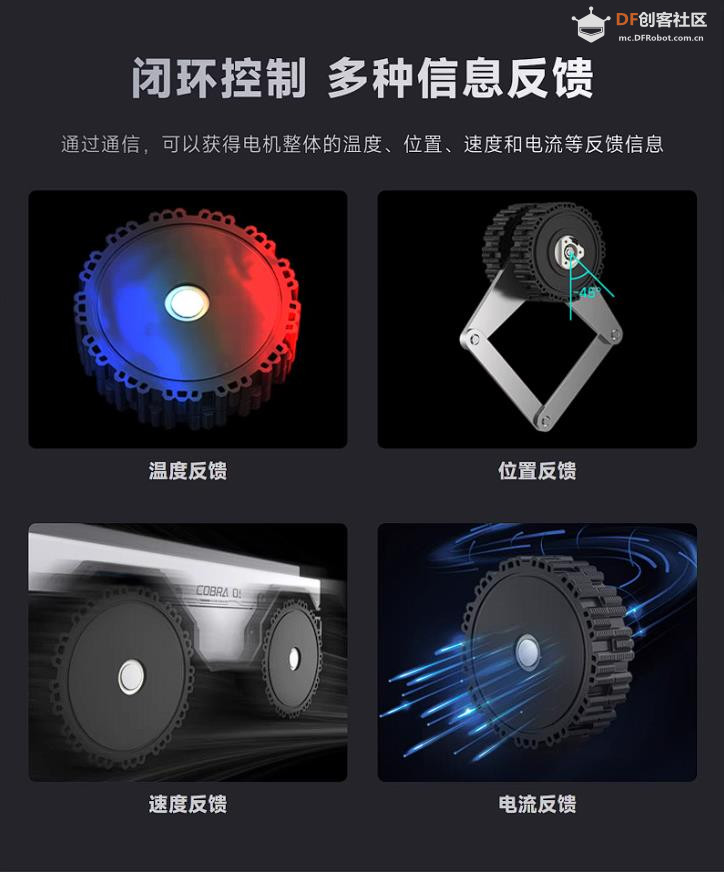
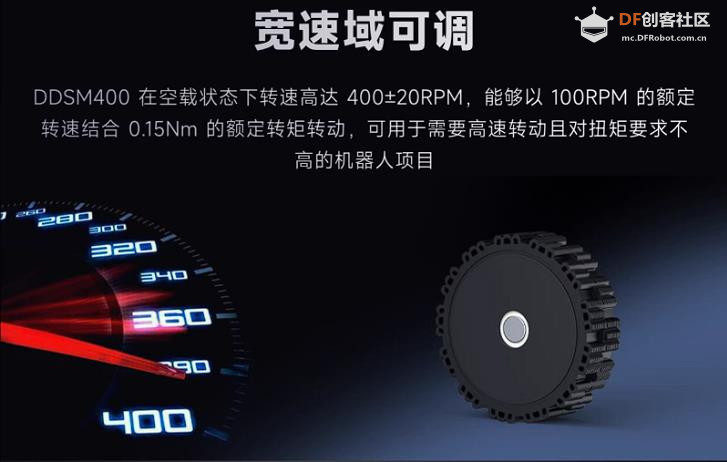
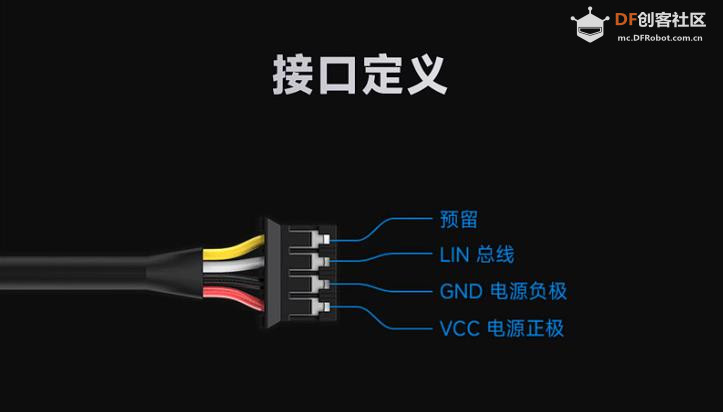
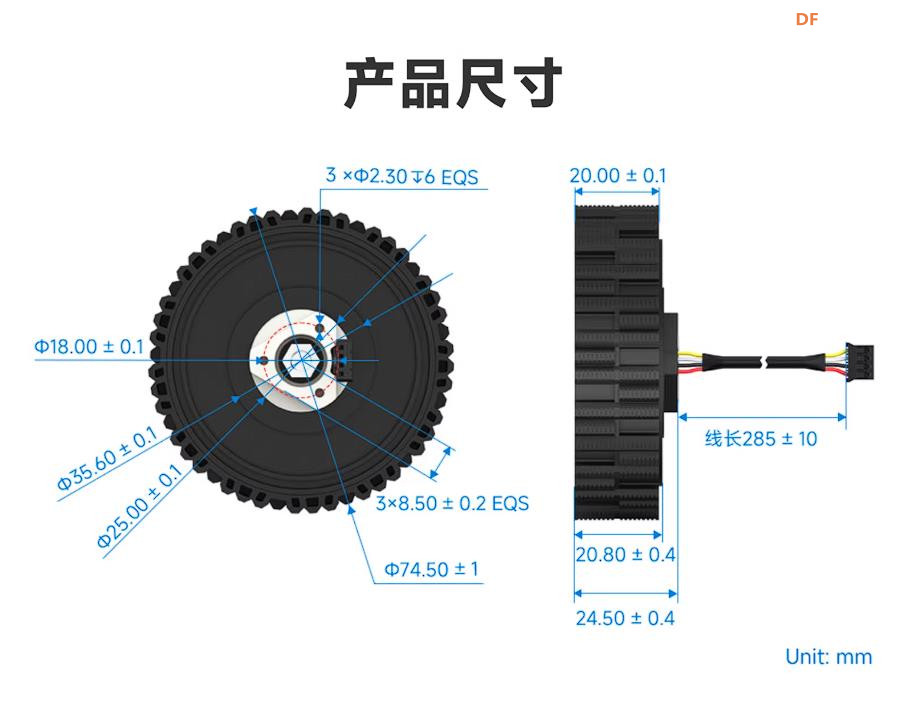
DDSM400 是一款65mm 一体化外转子伺服轮毂电机,专为小型机器人底盘设计,集成了外转子无刷电机、编码器与伺服驱动,采用钕强磁与 FOC 控制,直驱无间隙、响应快、精度高,非常适合搭配麦克纳姆轮做全向移动底盘。 一、核心参数与特点(创客 / 底盘视角) 1. 关键规格 尺寸:65mm 轮毂,外转子结构,可直接装轮 电机类型:外转子永磁同步电机(PMSM),钕铁硼强磁 额定电压:12–24V DC(适配机器人锂电池) 额定转速:100 RPM 额定扭矩:0.15 N·m 空载最高转速:400±20 RPM 空载电流:0.25 A 防护等级:IP54(防溅水、防尘) 通信:LIN 总线(可多电机同步控制) 反馈:内置高精度编码器 + 霍尔位置检测 驱动:板载 FOC 伺服驱动,一体化设计 效率:直驱无齿轮,效率接近 99.99% 2. 核心优势(对比普通无刷 / 轮毂电机) 一体化伺服:电机 + 驱动 + 编码器三合一,无需额外驱动板,接线极简 外转子直驱:无减速箱、零背隙,响应快、噪音低、寿命长 FOC 控制:低速平稳、调速线性好,适合麦克纳姆轮精准差速控制 钕强磁:同体积扭矩更大、发热更低、效率更高 LIN 总线:多电机同步、可实时读位置 / 速度 / 电流 / 故障码 IP54:适合室内外轻度环境,比普通电机更耐用 二、接线与控制(实操步骤) 1. 接口定义(典型) 动力线:VCC(12–24V+)、GND(电源地) 通信线:LIN、GND(总线地) 控制 / 状态:使能(EN)、方向(DIR)、故障输出(FAULT)、刹车(BRAKE) 2. 接线流程(安全优先) 断电接线:先接电机与底盘固定,再接线 动力供电:VCC 接电池正极,GND 接电池负极 通信总线:LIN 接主控(如 ESP32 / 树莓派)的 LIN 收发器,GND 共地 控制信号:EN 拉高使能;DIR 控制正反转;BRAKE 可接刹车 检查:确认无短路、无虚接,再上电 3. 控制方式(两种主流) LIN 总线控制(推荐) 发送速度 / 位置指令,读取实时反馈 适合多电机同步(麦克纳姆轮 4 轮协同) 示例:SetSpeed(100)、GetPosition() 模拟 / PWM 控制(简易) 部分版本支持 PWM 调速 + DIR 方向 适合 Arduino/STM32 快速原型 三、适用场景(机器人底盘为主) 1. 最佳匹配 小型全向麦克纳姆轮底盘(65–100mm 轮) 4 台 DDSM400 + 4 个麦克纳姆轮,实现前后 / 左右 / 斜行 / 原地自旋 负载:≤3–5 kg(桌面级、教学、竞赛) 差速驱动底盘(2 轮) 室内巡检、跟随小车、教育机器人 平衡车 / 自平衡底盘 响应快、精度高,适合姿态控制 2. 不适合场景 重载(>5 kg)、爬坡、越野 要求超大扭矩、高速(>500 RPM) 户外恶劣环境(需更高 IP 等级) 四、与普通无刷电机对比(选型参考)  五、创客选型建议 如果做高精度机器人底盘、追求精准、静音、易集成,DDSM400 是非常好的选择。 搭配 ESP32 / 树莓派 + LIN 总线,可快速实现 4 轮协同控制,无需自己写复杂 FOC 算法。 适合:教学实验、RoboMaster 入门、桌面级 AGV、自动跟随小车。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶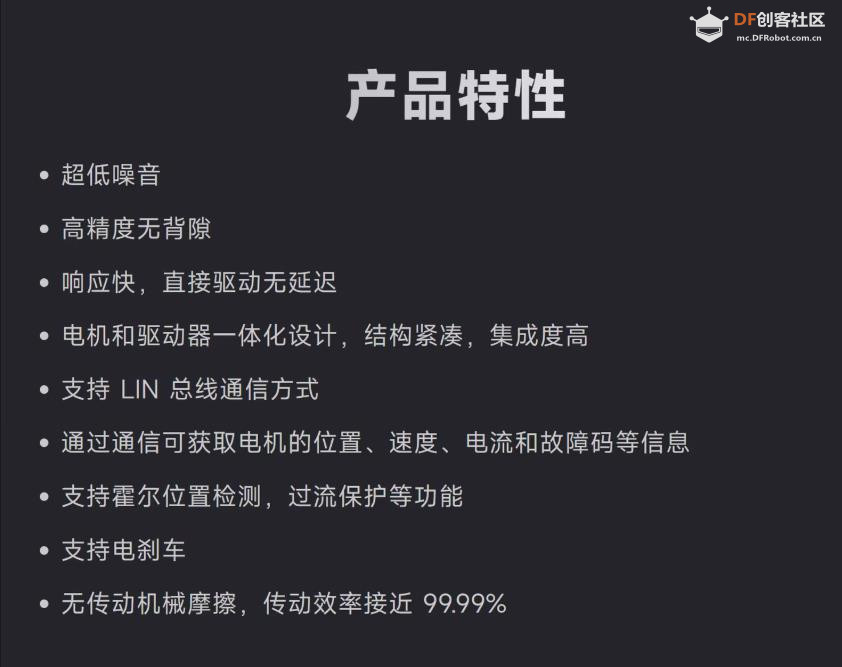





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






