|
2010| 7
|
[项目] 【Arduino 动手做】ESPlorer I - ESP32 越野机器人 |
|
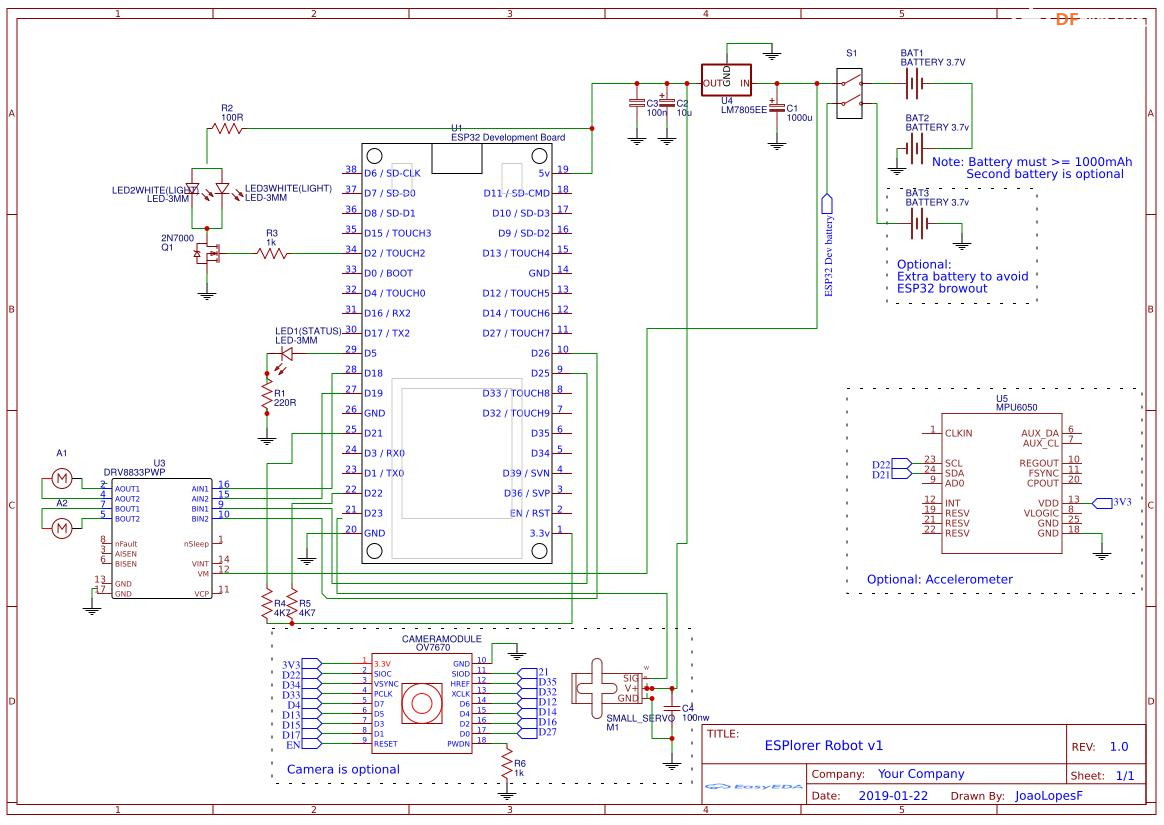
## 项目描述 我有一个机器人平台,金属的,坚固的。 我想在越野时使用它,更有趣:-) 但由于底盘刚性,越野性能不佳。 因此,我制作了我的第一个机器人平台,3D 打印,带有越野履带悬架。 我在 ESP32 Arduino 中制作了一个固件,具有高级功能: Web 控制(不需要应用程序,只需一个浏览器) 通过虚拟操纵杆控制汽车(这很好,因为您不需要看屏幕就可以触摸控制按钮,而且非常有趣) 另一个虚拟操纵杆用于控制相机的伺服装置 低速模式,使用 PWM 而非 PWM,以提供低速但高扭矩。 还有更多...  |
|
## 这是 ESPlorer I 机器人的固件 但可以控制任何机器人 4WD、2WD 或坦克。(需要对另一个电机驱动器进行一些工作,而不是 DRV8833) 该程序适用于 Arduino ESP32,具有以下高级功能: - Web control (not need an app, just an browser) - Motor control by virtual joystick - Slow speed by PMW over PWM, with higher torque - Optional OV7670 VGA camera with servo - Accelerometer to anti-rollover system (not yet develop) ## 安装 首先有一些库依赖项(请帮助作者给出一个 github start 开始): - Arduino websocket: https://github.com/Links2004/arduinoWebSockets - ESP32MotorControl https://github.com/JoaoLopesF/ESP32MotorControl - RemoteDebug: https://github.com/JoaoLopesF/RemoteDebug - SerialDebug (optional): https://github.com/JoaoLopesF/SerialDebug 安装后,只需将此固件上传到 ESP32 即可  |
|
本帖最后由 驴友花雕 于 2025-6-7 06:57 编辑 附录 【Arduino 动手做】带有网络控制、摄像头、越野履带悬架的越野机器人 【Arduino 动手做】ESPlorer I - ESP32 越野机器人 项目链接:https://projecthub.arduino.cc/Jo ... f-road-robot-7d5e8b 项目作者:JoaoLopesF 项目视频(6分钟):https://www.youtube.com/watch?v=KUckqEnlK_E 项目代码:https://github.com/JoaoLopesF/ESPlorer_v1#readme https://codeload.github.com/Joao ... p/refs/heads/master 与 ESP32 Arduino 平台配合使用。 请参阅 https://github.com/espressif/arduino-esp32   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






