|
1783| 8
|
[项目] 【Arduino 动手做】DeathGrip:机器人利爪手套 |
|
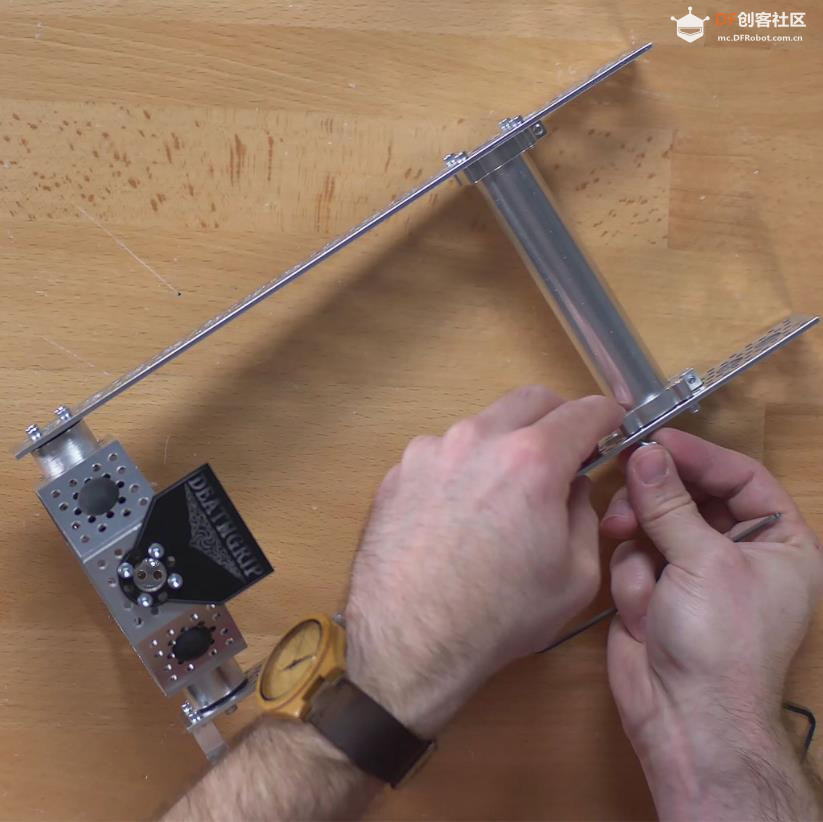
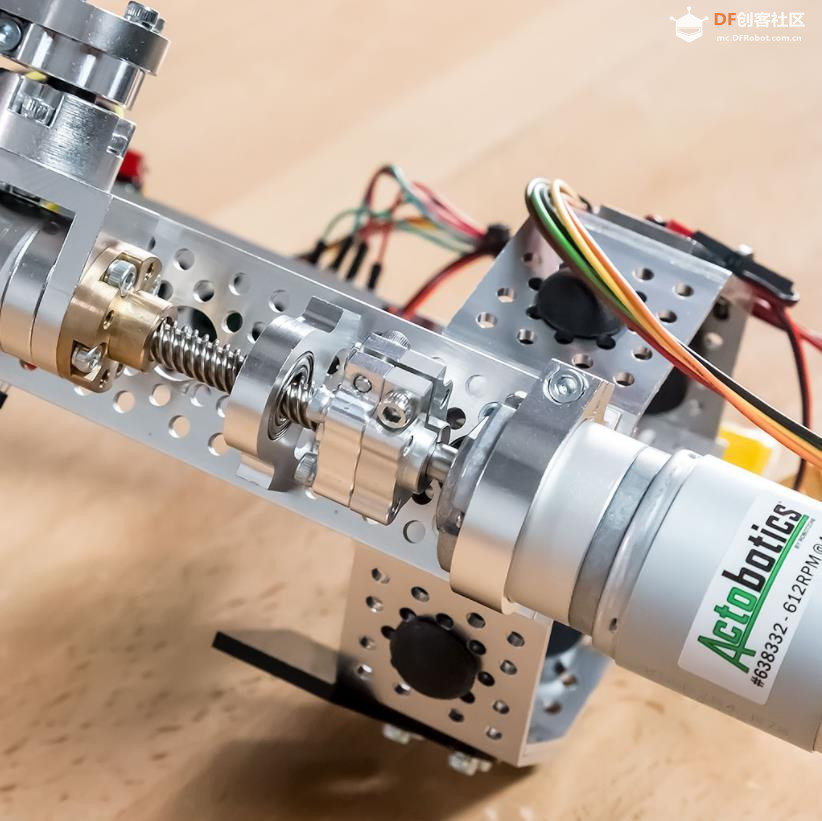
## 步骤2:线性执行器 导螺杆: 我使用了一颗螺距为 2 毫米的 8 毫米导螺杆。由于它是四头导螺杆(有四条并联螺纹),因此导螺杆螺母每旋转一圈,其线性行程为 8 毫米。我通过一个 8 毫米夹紧轮毂和一个 6 毫米 D 型轮毂将 8 毫米导螺杆连接到电机的 6 毫米 D 型轴上。这两个轮毂都是现成的,只需在其中一根轮毂上钻出螺纹,我就可以将它们用螺栓固定在一起;这样一来,两个轮毂就能牢牢地固定在一起,无需担心固定螺钉的问题。 电机/编码器: 我使用了一台带编码器的 612 RPM 重型高级行星齿轮电机。编码器是一个相对正交编码器,输出轴每旋转一圈,就会产生 672 个可计数事件。考虑到我刚才提到的丝杠规格,每 1 毫米线性行程就会产生 84 个可计数事件。 行程组件: 我想要一个双导螺杆螺母组件。主要是因为我喜欢黄铜导螺杆螺母的外观,因为我偏爱蒸汽朋克美学,而它带有浓郁的蒸汽朋克风格。我还想演示如何在一个组件上使用多个导螺杆螺母,因为要找到合适的间距可能比较棘手。关键在于用夹紧轮毂将组件的两侧连接起来,然后松开压紧螺栓,旋转一侧,直到感觉间距合适。然后竖起导螺杆,看看行程组件是否能仅靠重力平稳下滑。 推臂: 我用一根铝管做推臂,用来打开和闭合其中一个爪形“手指”。我使用了双滚珠轴承轮毂,以获得一个坚固而平滑的关节,它只能绕一个平面旋转,同时限制了行程组件绕导螺杆的旋转。 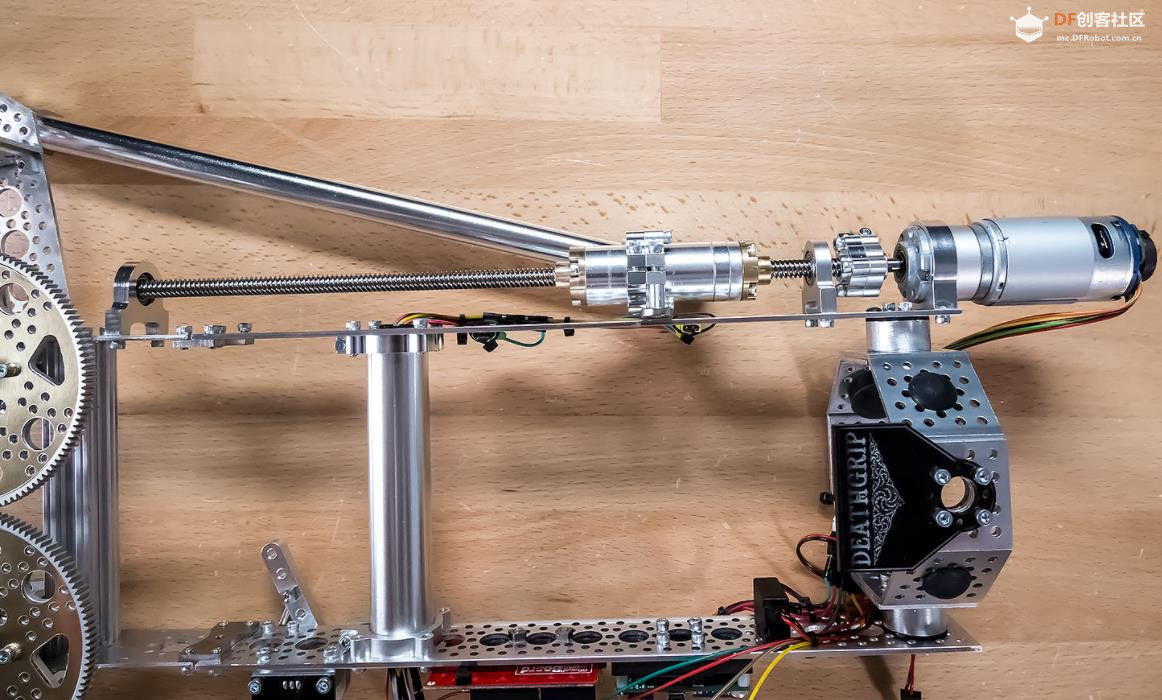 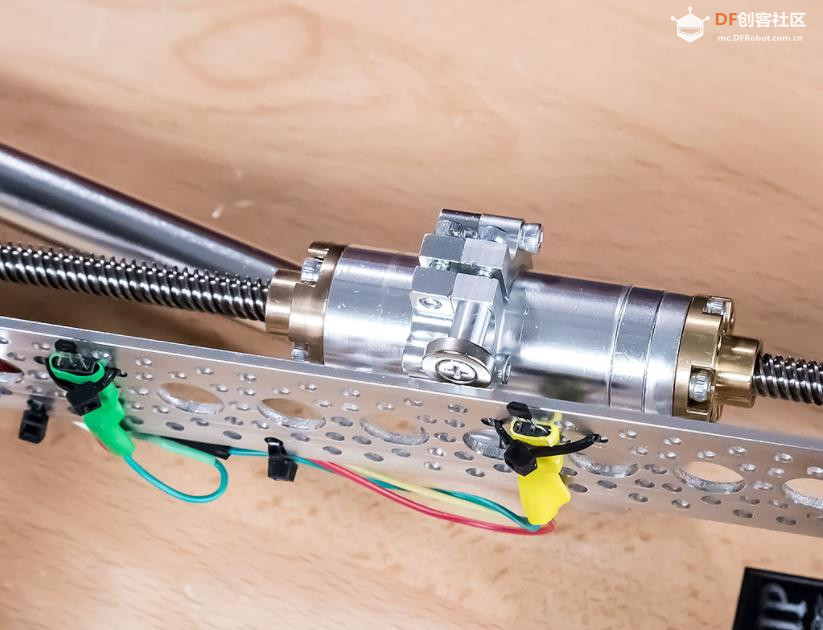 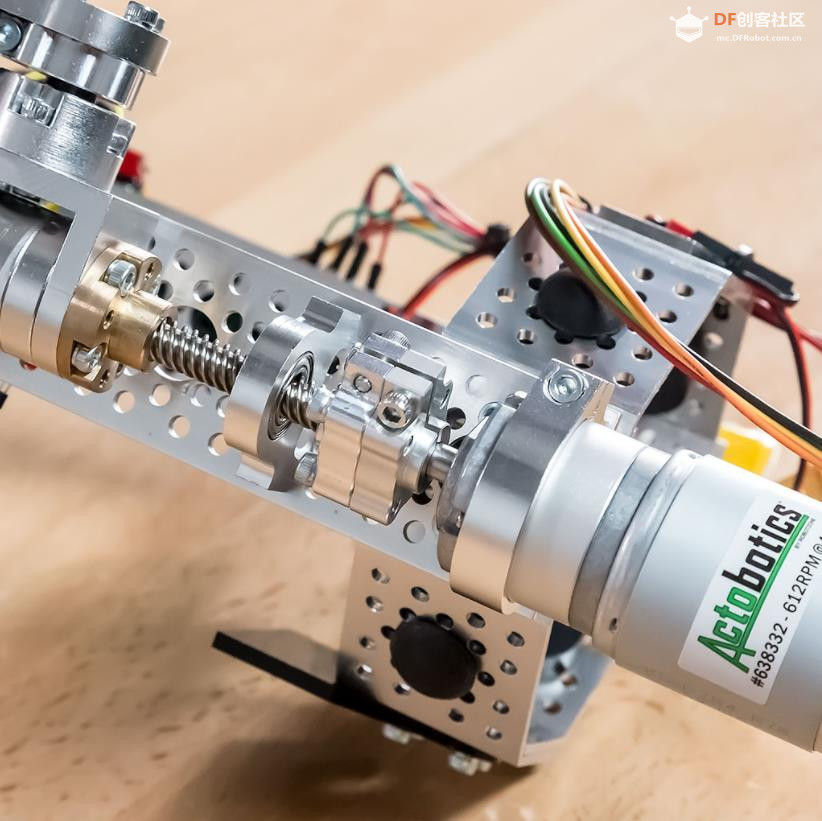 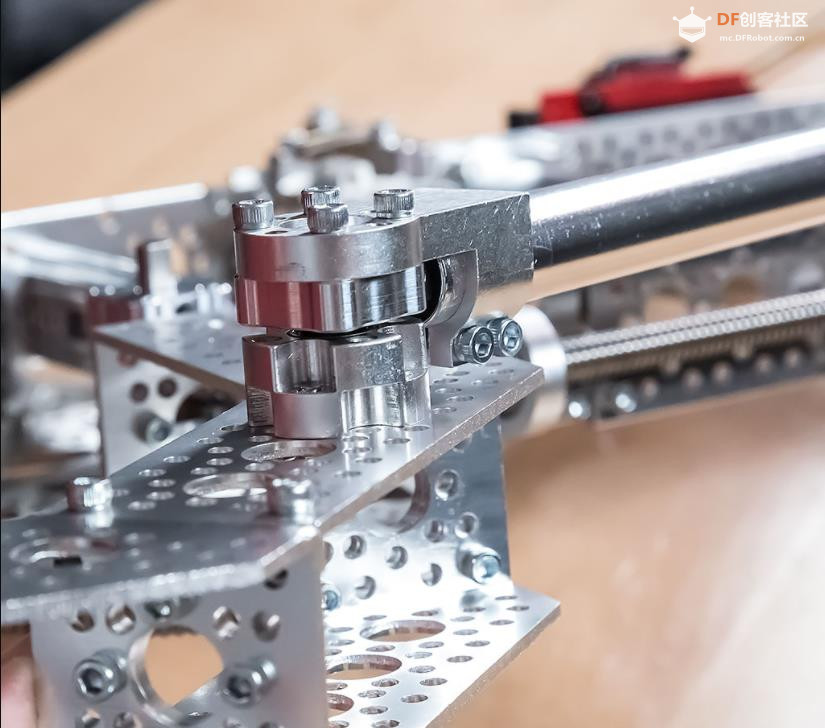 |
|
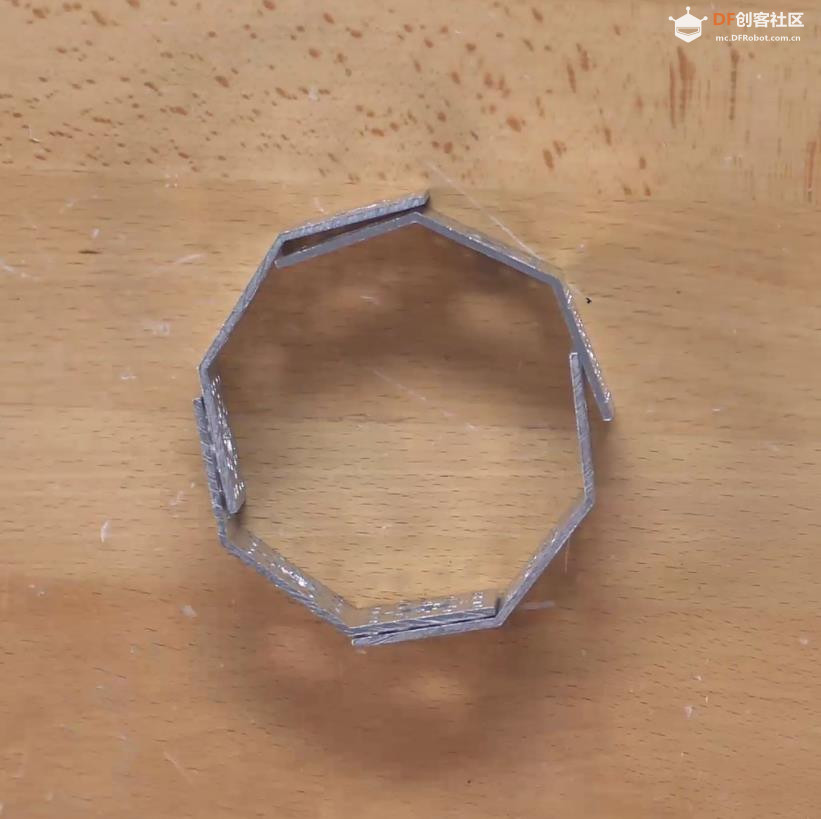
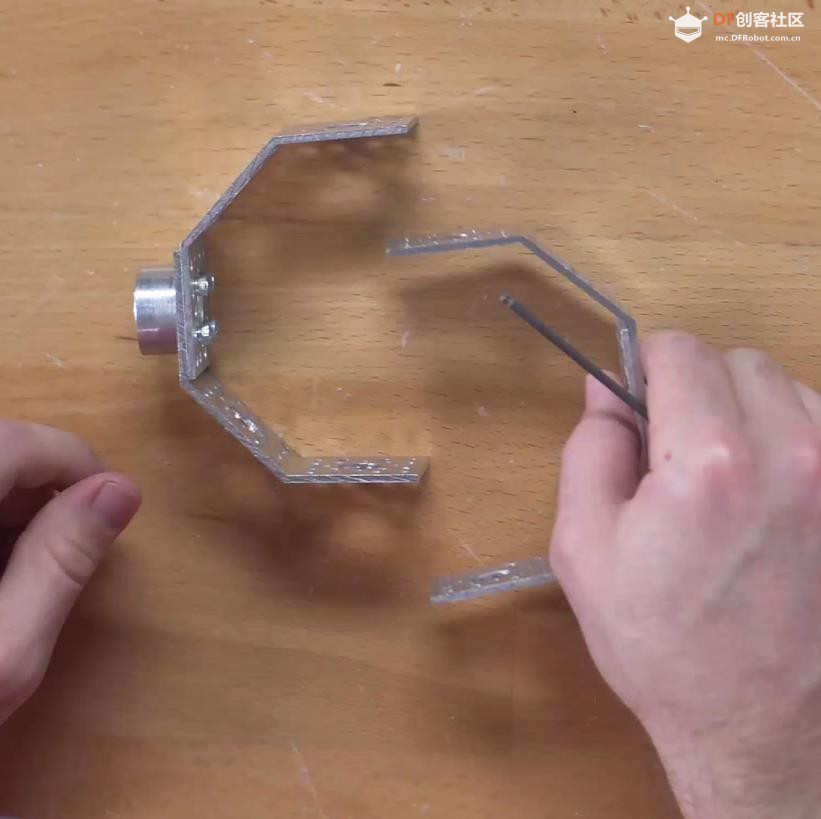
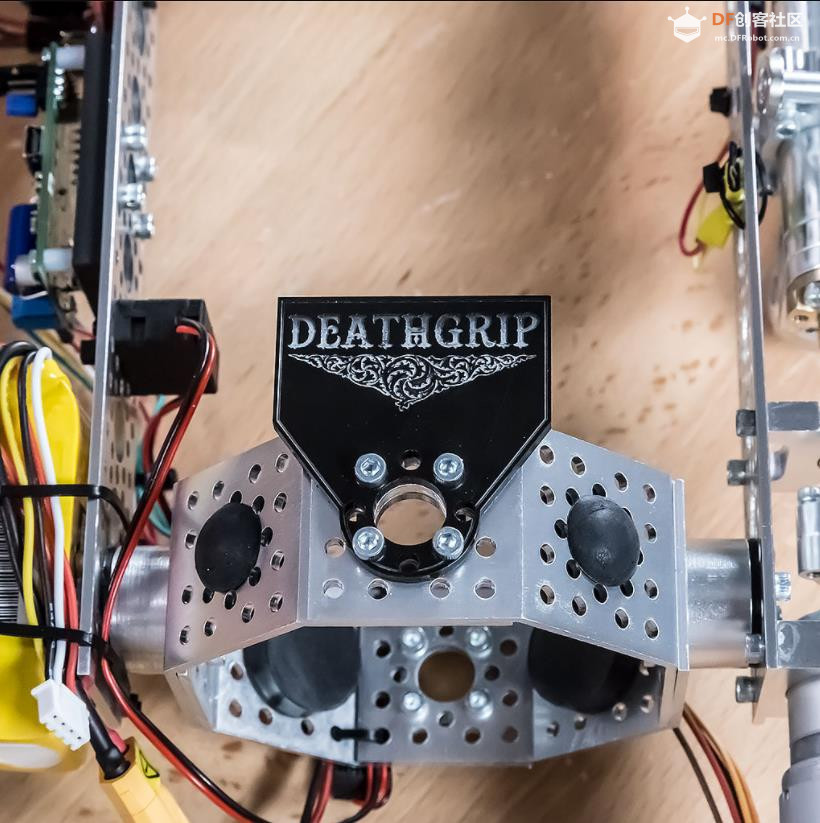
## 步骤3:爪子 我用一些模型支架做手指,并制作了一些塑料爪尖,用螺栓固定在末端。一根手指通过线性执行器推臂推/拉开/闭合。另一根手指则通过两个大型128齿32齿距铝制轮毂安装齿轮来镜像运动。我剪了一些金属纸来镶嵌齿轮,因为我就是这么做的。 由于我想将这些大型齿轮组合在一起,所以最终将齿轮齿条安装在X型导轨上。使用80/20等挤压成型或X型导轨来安装啮合齿轮与使用槽钢安装相比,各有利弊。使用槽钢的优点在于,您知道所有齿轮都会对齐并保持合适的间距。此外,由于您可以将轴穿过两面相隔一定距离的壁,因此可以获得极佳的稳定性。然而,您必须根据要使用的齿轮进行计算。例如,对于Actobotics槽钢上的32齿距齿轮,两个啮合齿轮之间的齿数必须是48的倍数。这对于128齿的齿轮来说不适用 (128+128)/48 = 5.1875,因为这不是整数。因此,挤压成型的优势在于您可以滑动齿轮,直到它们啮合良好,然后拧紧安装座。但是,您必须确保它们足够紧,不会滑落,并且间距恰到好处。对于这个项目来说,这种方法非常有效,因为它主要是为了展示,而且我不会用它举起任何非常重的东西。 使用带有双滚珠轴承轮毂的 90° 图案支架,可以给我一个强大而平滑的指关节,同时非常紧凑,因此我可以进行大量旋转。 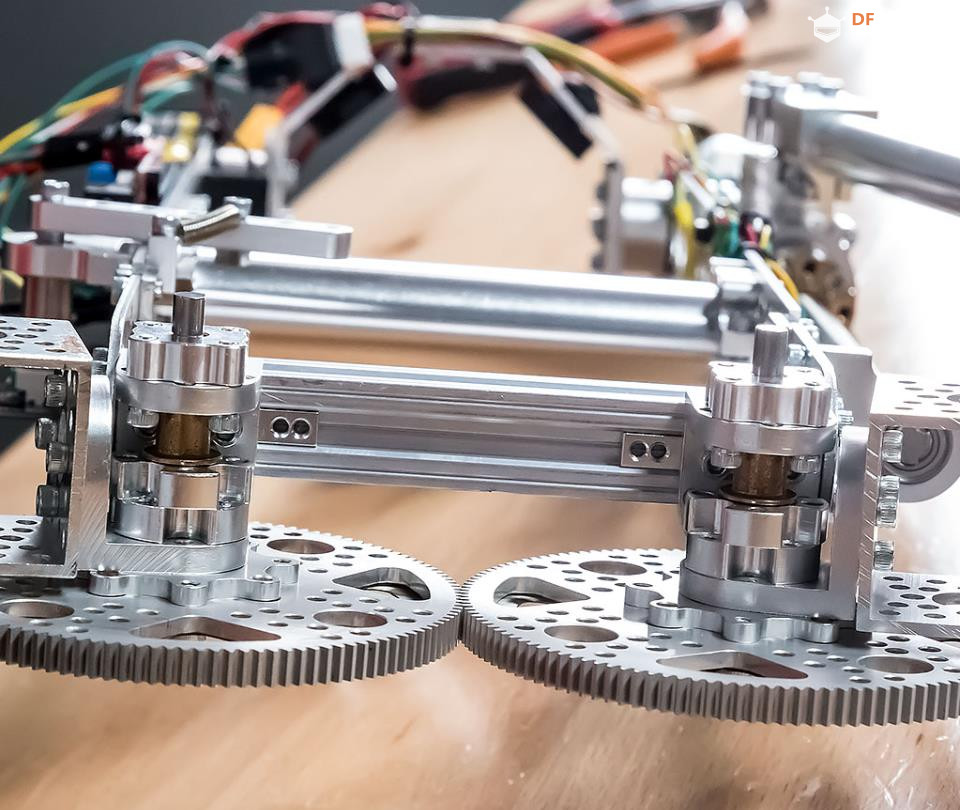 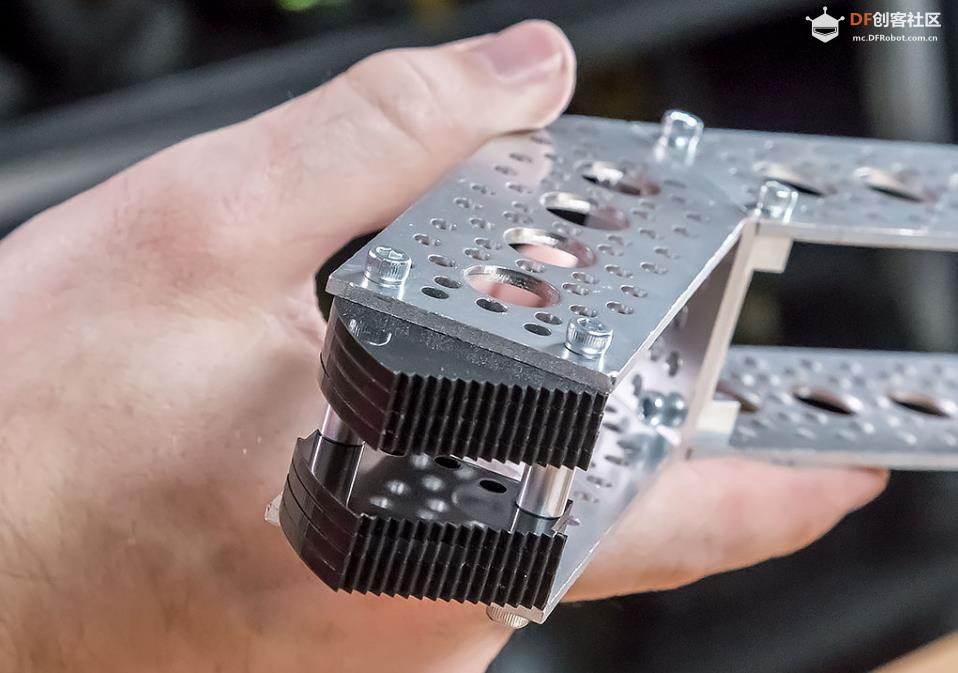 |
|
## 步骤4:控制 SparkFun RedBoard 是该操作的核心。 一个小的铝梁连接到一个电位器(由一个枕块支撑)上,用于触发。 安装扳机组件后,我绘制了一个简单的草图来显示当我来回扣动扳机时电位器的最高读数和最低读数......这个最小读数和最大读数会用在我的最终草图中,对于准确映射扳机拉力的扫描范围非常重要。 主程序会读取电位器的值,以查看其当前在扳机实际行程内的位置(如果将其拉至一半,读数将位于先前记录的最小值和最大值的中间值)。一旦确定了应在的位置,就需要知道当前位置。这与电机上的编码器有关。由于编码器是相对的而非绝对的,因此设备首次启动时会运行一个校准序列。线性执行器的行程组件上有一个磁铁,还有两个霍尔效应传感器用于检测磁铁。虽然很难看到,但每个传感器的底部都连接了一个电阻器(外面包裹着彩色热缩管)。校准序列会缓慢地驱动电机沿一个方向移动,直到到达第一个传感器,然后将编码器值记录为第一个端点。接下来,电机反向移动,直到到达另一个传感器,到达另一个传感器后,再次将编码器值记录为下一个端点。之后,它可以轻松地将扳机行程映射到执行器行程。如果触发器位于其最小值和最大值的中间,并且两个编码器端点为(例如)1000 和 3000,则电机将被驱动,直到编码器读数为 2000。 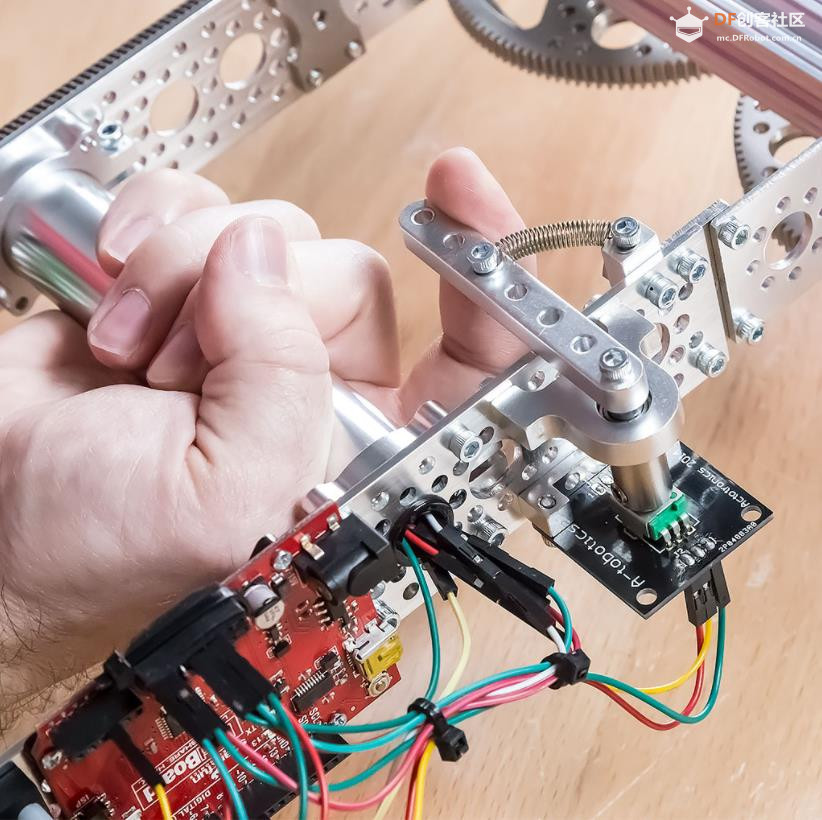 |
|
本帖最后由 驴友花雕 于 2025-6-7 06:50 编辑 附录 项目链接:https://www.instructables.com/DeathGrip-Robot-Claw-Gauntlet/ 项目作者:马其顿 米尔塞姆克 项目视频(7分钟):https://www.youtube.com/watch?v=4U7t6UIWo_E 项目代码:https://content.instructables.co ... F1GZL6UIUSM937K.zip https://content.instructables.co ... FOV3UB7IUSM93I7.zip  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶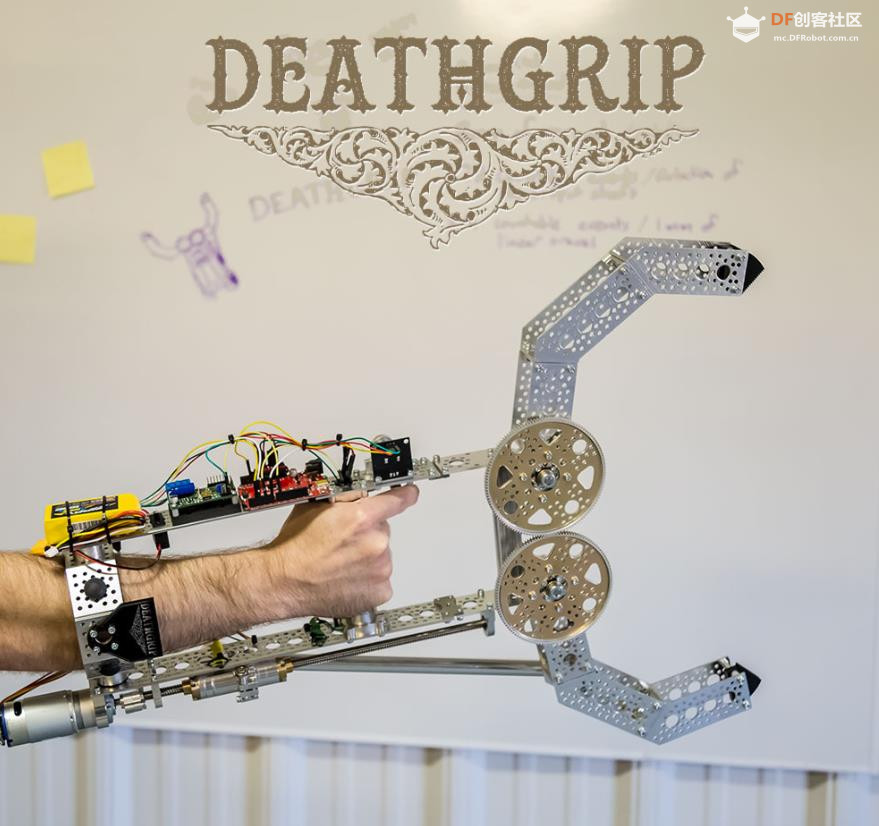



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






