|
1631| 9
|
[项目] 【Arduino 动手做】超级酷的Cube 漫游者行星探测车机器人 |
|
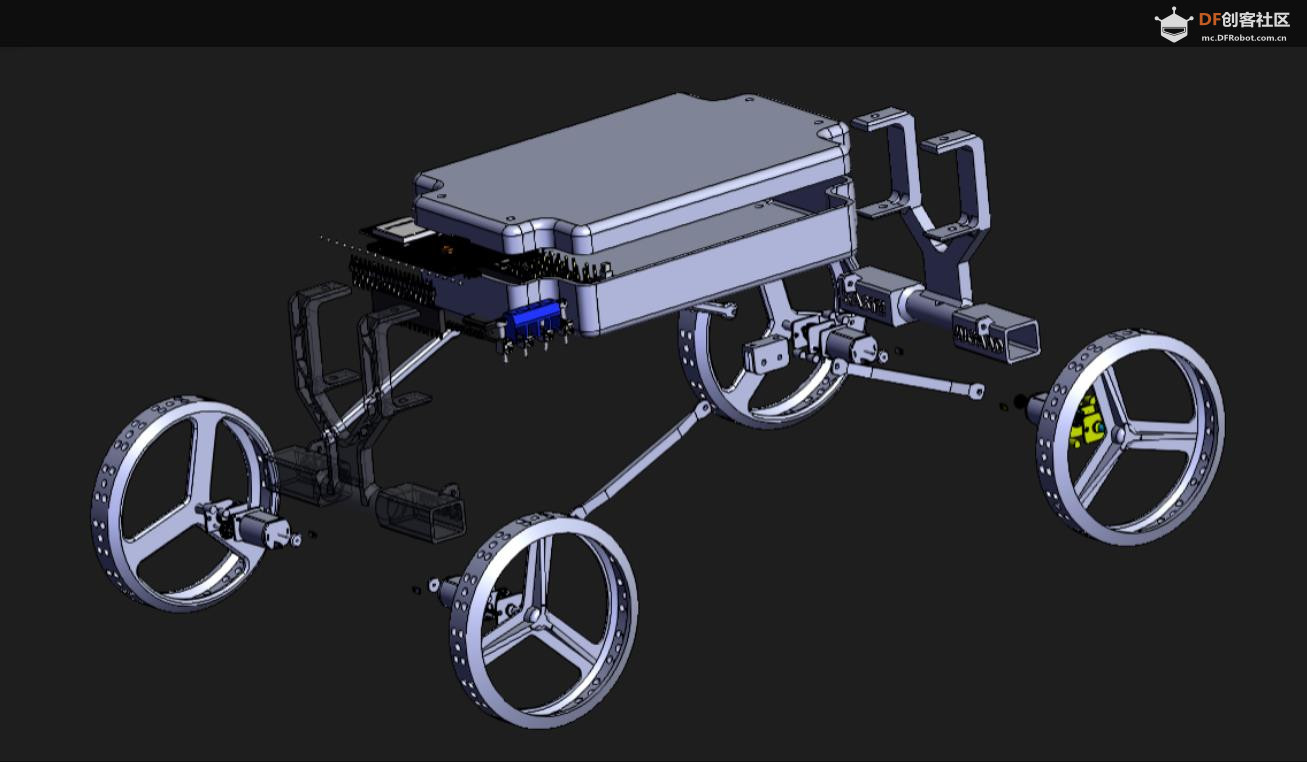
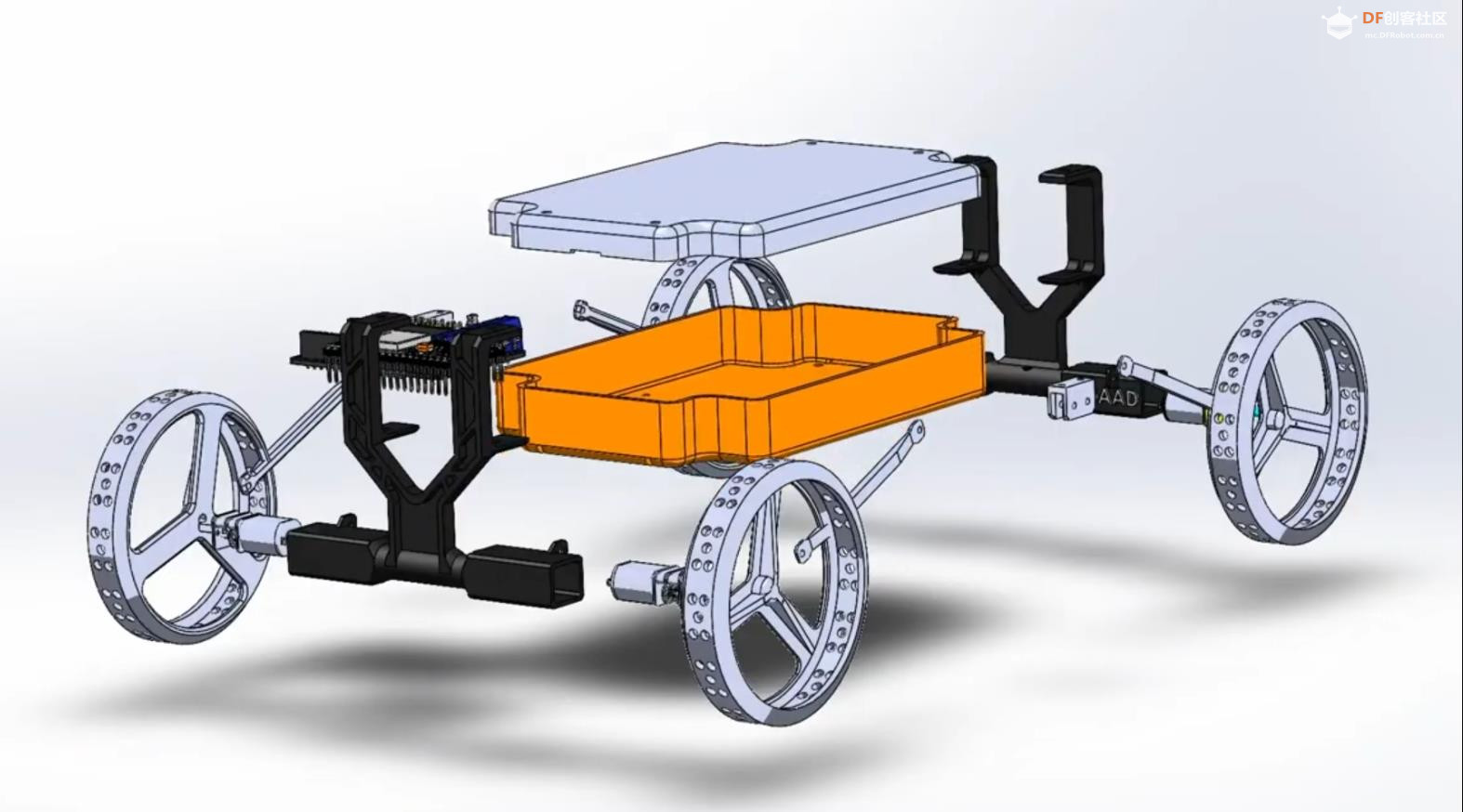
Cube 漫游者行星探测车机器人是一种新型行星探测车,价格实惠且易于制造。如果人类想要成为跨行星物种,我们需要一种经济实惠且可扩展的方案来将物品运送到其他星球。 立方体探测车级概念由Astrobotic Technology与卡内基梅隆大学 合作 开发 ,部分资金来自美国宇航局的奖励。 Astrobotic Technology 是一家美国私营公司,致力于开发用于月球和行星任务的太空机器人技术。2018 年,他们分享了一段立方体探测车的测试视频,我受到了启发,决定制作一个 3D 打印版本的立方体探测车。   |
|
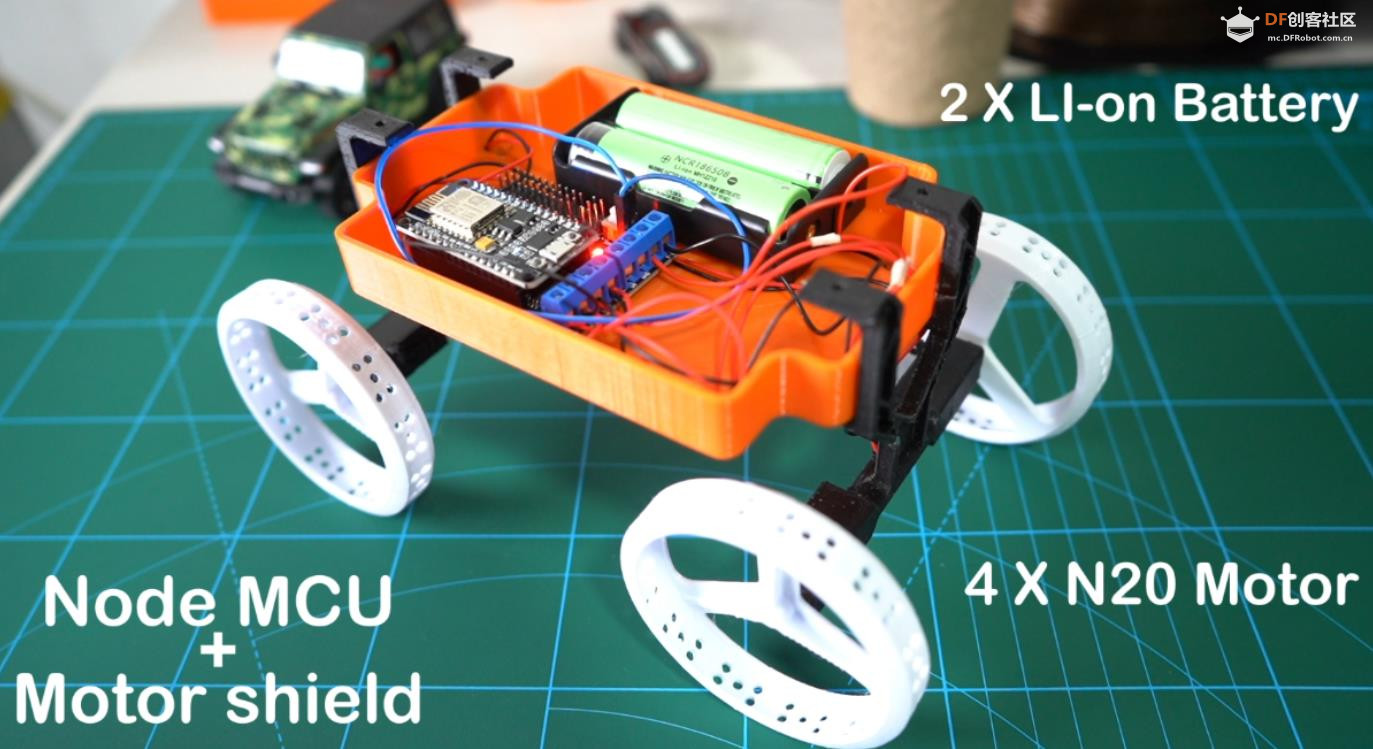
## 步骤2:电路和电源 我讨厌焊接,所以我用了 Node MCU 电机屏蔽。无需焊接。如果您想单独为电机供电,电机屏蔽为电机和 Node MCU 提供了独立的电源通道。 电机护罩只有两个连接端口,但我们有四个电机,所以要共用一个。左侧电机连接到一个接口,右侧电机连接到另一个接口。电机应并联。 我使用两节锂离子电池供电。电机护罩本身就自带电源输入接口,所以不用担心。请确保电池连接正确,电机护罩上会标明正负极。 请使用本用户手册来了解电机护罩的工作原理。 电机防护罩 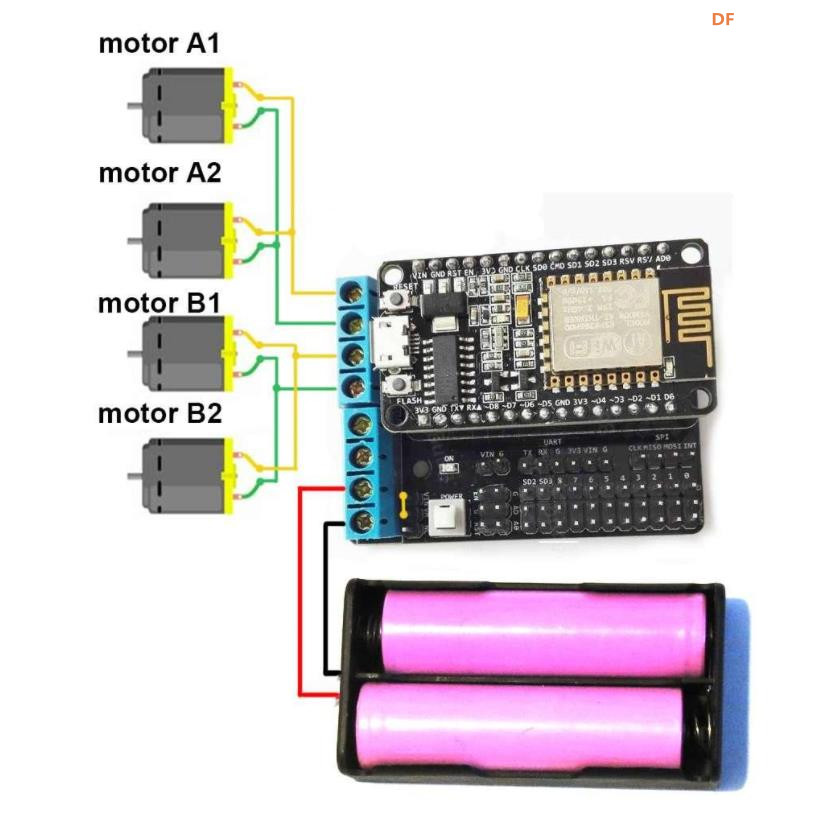 |
|
## 步骤3:解释代码 这些是电机引脚,无法更改。如果您想添加更多传感器,请使用其他引脚。 #define motorb_pwm D2 // 电机 B #define motorb_dir D4 #define motorA_pwm D1 // 电机 A #define motora_dir D3 此变量控制探测车的前进和后退速度。其范围为 0-1023 int 驱动功率 = 600; 这个变量告诉我们转弯速度 int 转向功率 = 600; 这是端口号,如果您更改此值,请在 IP 地址后计数到机器人时在浏览器中输入相同的值。 ESP8266WebServer服务器(80); ## 步骤4:控制探测车 控制探测车 一旦探测车开启,它将尝试连接到代码中预先定义的热点。 默认值为“测试”,但您可以在代码中更改它。 // ---------------- // 在此处设置您的 WiFi SSID 和密码 // ---------------- const char* ssid = "test"; const char* password = "test1234"; 您必须在移动设备上创建一个热点,其名称和密码必须与代码中设置的名称和密码一致。否则,机器人会持续搜索,却永远找不到您的设备进行连接。 一旦比特连接到您的设备,请进入手机的 WiFi 设置,查找机器人的 IP 地址。您的手机将显示所有已连接设备的 IP 地址。如果您在那里没有看到,则表示机器人尚未连接您的 WiFi 名称,并且密码可能错误。 一切连接完成后,打开手机上的任意网页浏览器,输入机器人的 IP 地址和端口号(80)。你应该会看到如下控制页面。 例如,如果您的 IP 地址是 192.168.176.21,您将在浏览器中输入此地址 192.168.176.21:80 现在我们完成了:)。 您在屏幕上看到的视频来自我很久以前买的一款 wifi 摄像头。这款摄像头现在已停产,所以我没有把它包含在这篇教程中。如果您仍然需要视频,可以购买任何一款价格实惠的 wifi 间谍摄像头,它们的工作原理都一样。这款摄像头会附带一个应用程序,您可以连接到摄像头,获取实时视频后,就可以将其叠加到控制页面上。 我之前在另一个项目中做过类似的,请看这个视频。同样,摄像头是可选的。如果你想让我做一个更好的版本,请告诉我 :)  |
|
本帖最后由 驴友花雕 于 2025-6-8 15:26 编辑 附录 项目链接:https://www.instructables.com/Cube-Rover/ 项目作者:印度 shubham_bhatt 视频教程(4分钟):https://youtu.be/0cKGD4VUtmg https://www.youtube.com/watch?v=0cKGD4VUtmg 原始探测车的视频 https://www.youtube.com/watch?v= ... _channel=Astrobotic STL:https://grabcad.com/dashboard https://www.thingiverse.com/thing:4705152 CAD : https://grabcad.com/library/cube-rover-by-astrobotic-1 项目代码:https://github.com/sastejugaad/CubeRover   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






