|
1952| 9
|
[项目] 【Arduino 动手做】可以用伺服器控制的盘子 : 平衡板游戏 |
|
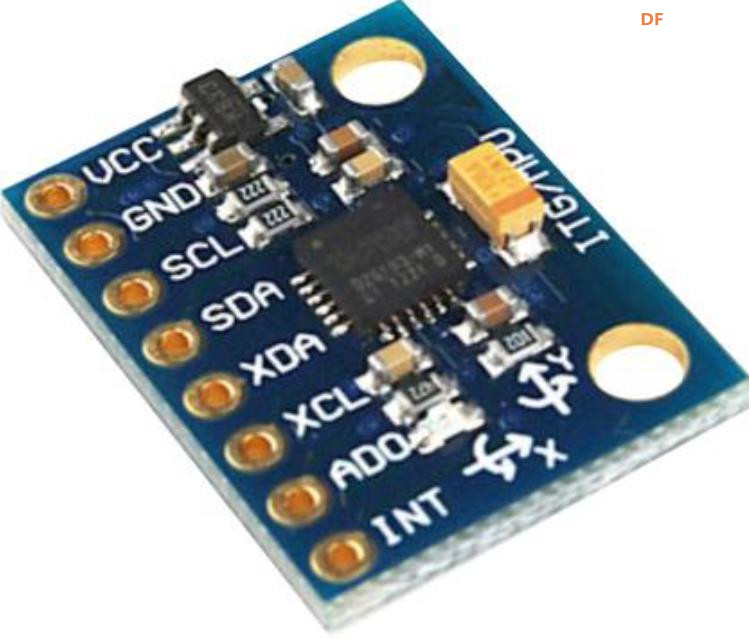
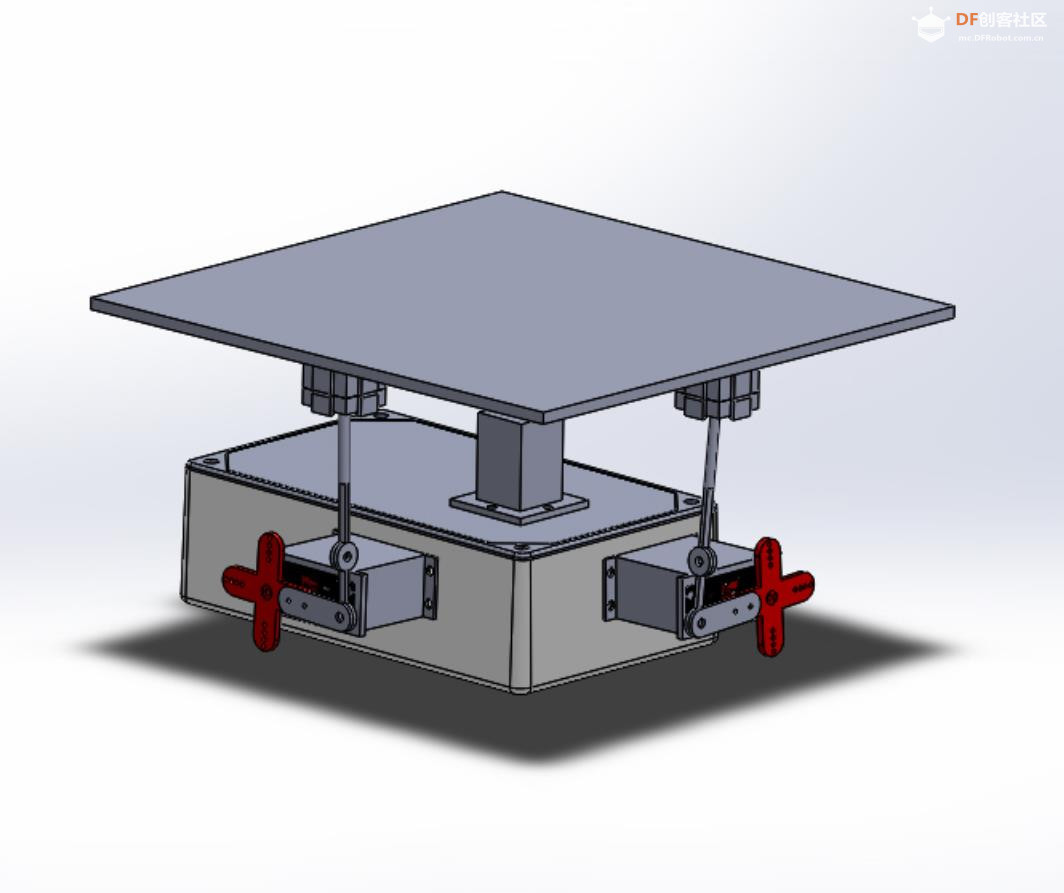
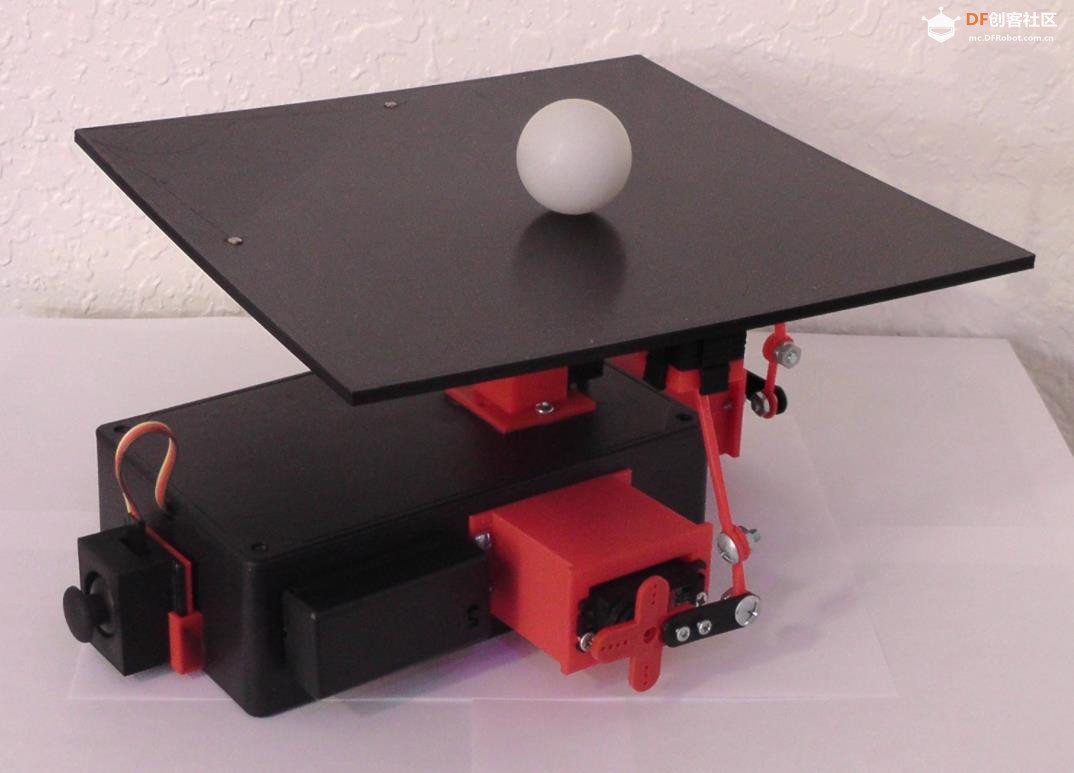
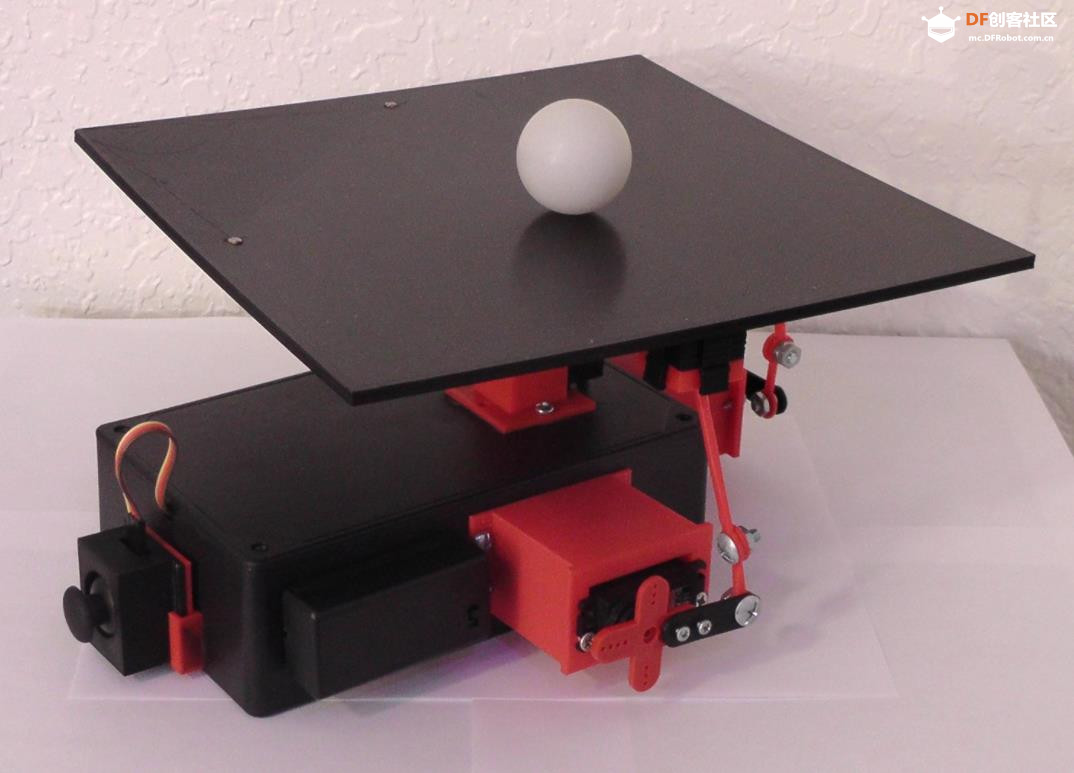
本教程是为了满足南佛罗里达大学 Makecourse 的项目要求而创建的(www.makecourse.com) 你好,我叫拉米·穆尼尔 (Ramy Mounir),是一名学生创客,就读于南佛罗里达大学 2015 年秋季的 MAKE 课程。我使用 Arduino 作为微控制器,制作了一个可以用伺服器控制的盘子。它有三种操作模式,适合 0 到 2 人。0 人模式是让盘子自行保持平衡,无论你如何移动盒子,盘子始终保持水平!单人模式是使用操纵杆将球保持在盘子上。最后一种模式与前一种类似;但是,两名玩家可以使用闪光灯来移动盘子。 在本教程中,我将向您介绍如何构建这个令人敬畏的项目。 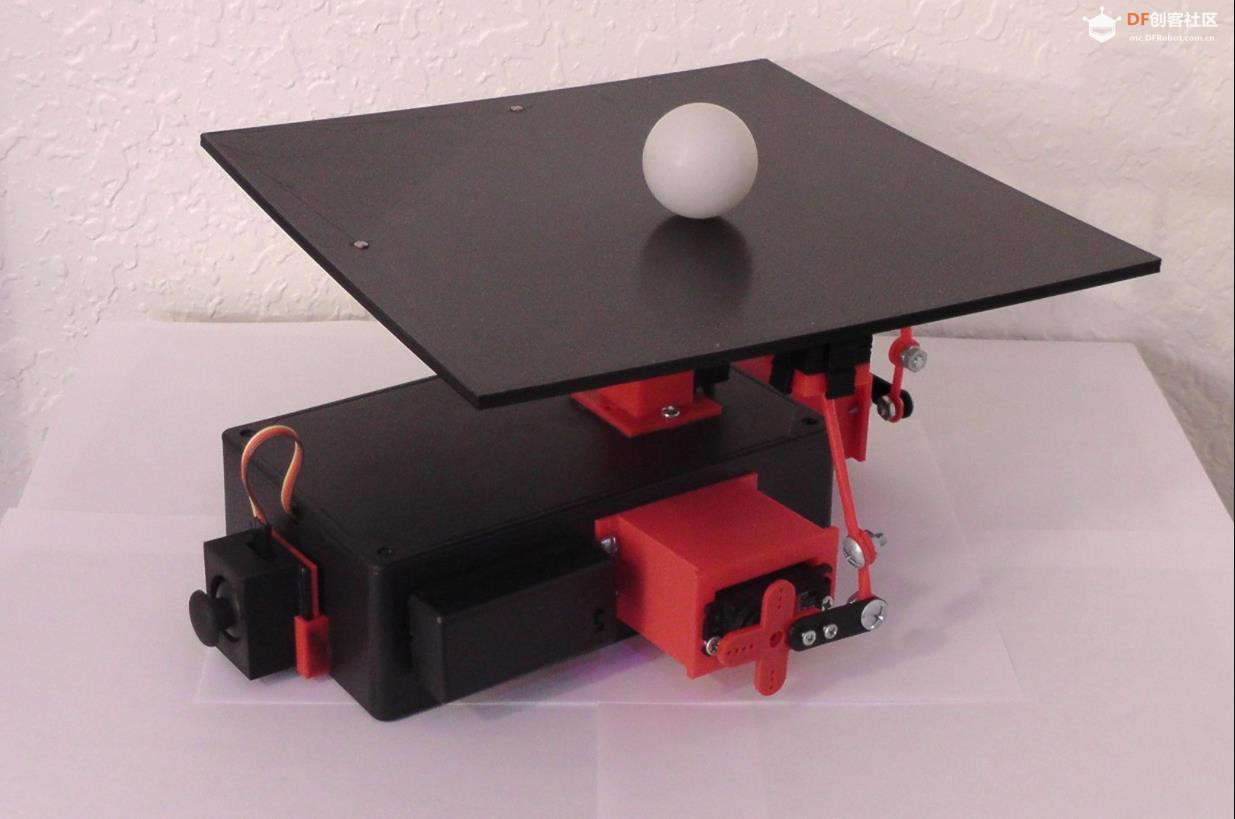 |
|
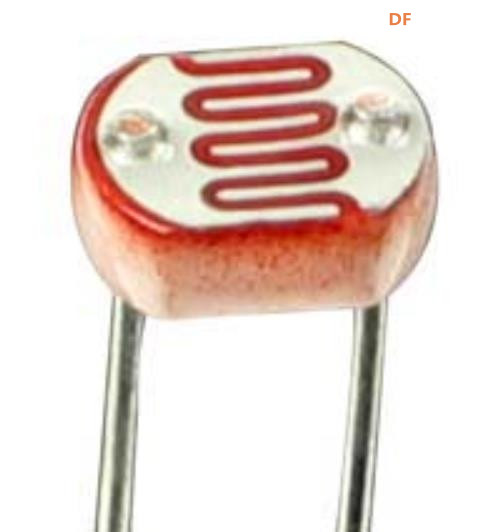
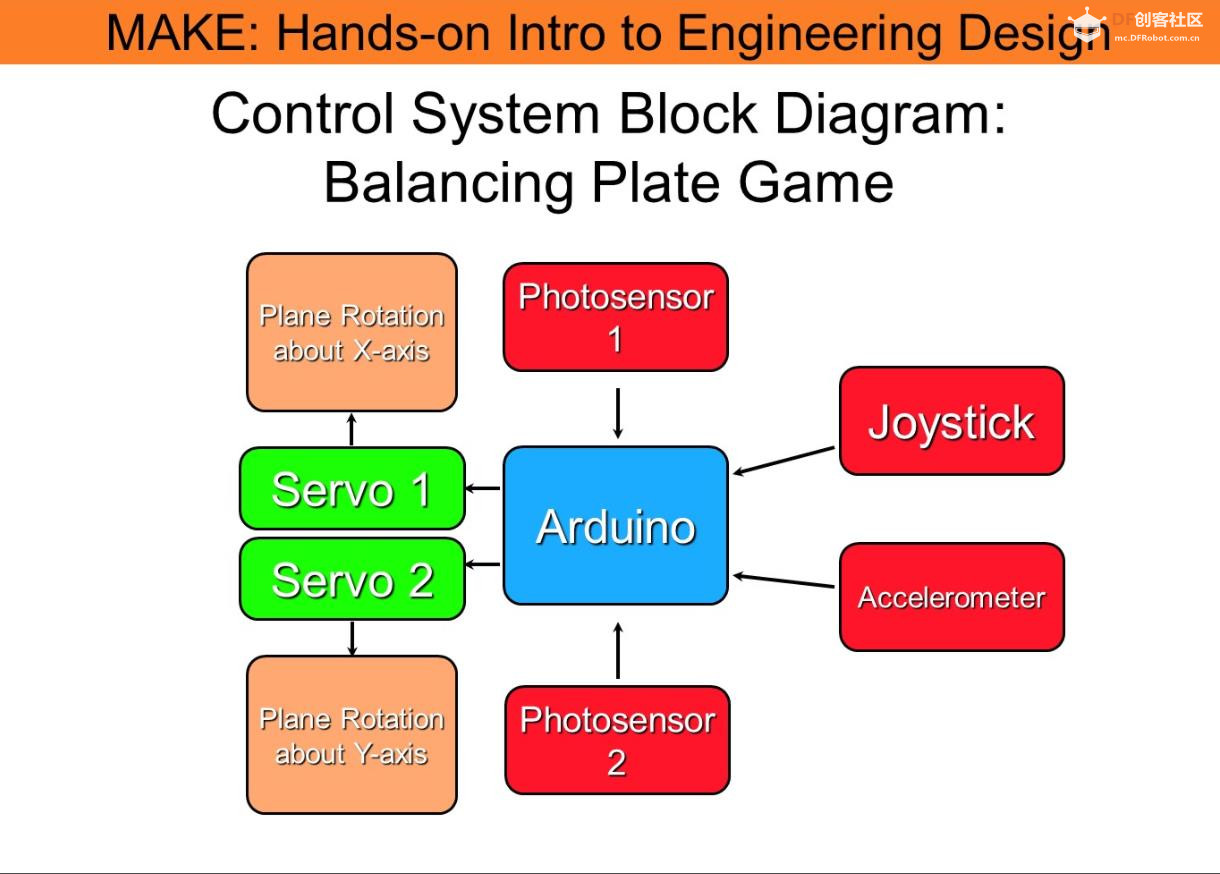
## 步骤5:Arduino代码 注释的 arduino 草图附于此步骤。 草图分为两个选项卡:主选项卡和功能选项卡。 主选项卡本质上是循环函数中的一个 switch case。它调用模式检查函数,并根据模式检查函数的返回结果转到正确的 case。 功能选项卡包含 5 个功能: setplane(); // 该函数在设置函数中将平面设置为水平 checkbuttons(); // 此函数检查我们处于哪种模式。如果操纵杆不在正常位置,它将返回相应的案例编号。同样,如果它检测到的光照值大于指定值,它将返回一个不同的案例编号。如果没有检测到任何内容,则将激活默认案例。 followlight(); // 使用比例控制系统根据期望光值和实际光值之间的误差保持光电管和手电筒之间的特定距离。 balance(); // 与 followlight() 功能相同,但使用加速度计值而不是光值。 followjoystick(); //将操纵杆的输入信号映射到伺服电机的输出 pwm 信号。 |
|
本帖最后由 驴友花雕 于 2025-6-8 15:32 编辑 附录 项目链接:https://www.instructables.com/Ba ... Mounir-MAKE-Course/ 项目作者:拉米·穆尼尔 (Ramy Mounir) 项目视频(3分钟):https://www.youtube.com/watch?v=M2et4XJb3e4&t=3s 项目代码:https://content.instructables.co ... FOQGOSXIHWIPK8J.zip 3D文件:https://content.instructables.co ... FY6WM6FIHWIPG4O.zip   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶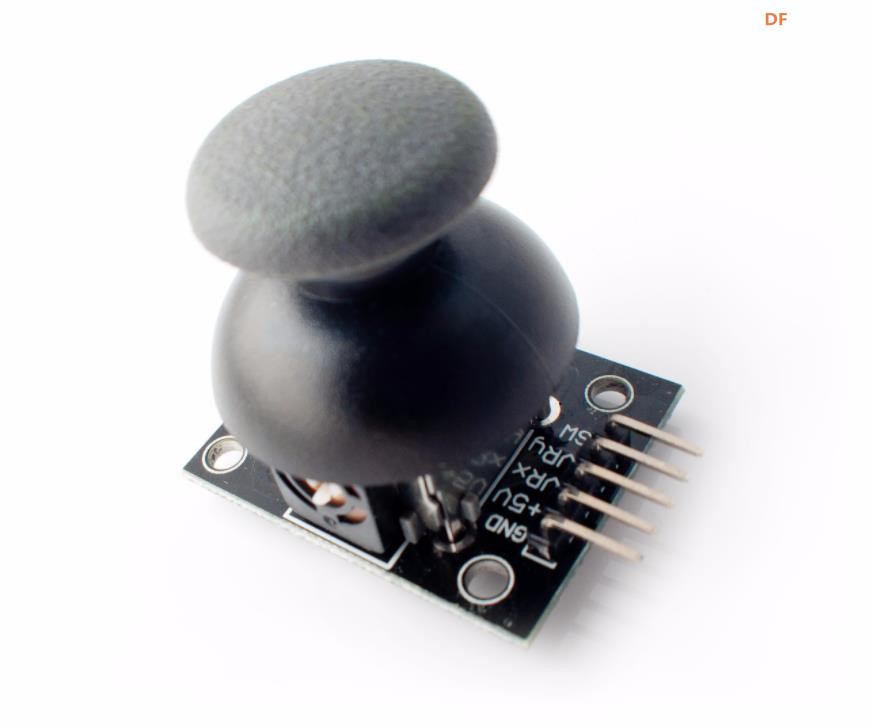


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






