本帖最后由 云天 于 2025-6-23 16:00 编辑
【项目背景】
本项目将行空板M10扩展板组合(含电机IO扩展板、金手指扩展板、800mAh电池扩展板) 移动供电+双电机控制,与小智AI相结合,实现语音日常对话控制小车前进、后退、左转、右转等。
1.行空板M10扩展板双路电机驱动,精准动力输出
- 独立控制两路直流电机,支持PWM无级调速与正反转调节,板载信号指示灯实时反馈运行状态,适配智能小车、机械臂等高精度控制场景。
- 通过P5/P8(M1)、P6/P16(M2)四路I/O口即可完成驱动,简化接线复杂度。
2.小智AI
- 小智AI是深圳十方融海科技有限公司推出的开源人工智能语音对话项目,集成语音识别、自然语言对话等核心技术,支持开发者构建具备情绪感知等多模态交互能力的定制化AI应用。
【项目准备】
1.小智AI安装
结合行空M10小智AI的“新眼睛”(https://mc.dfrobot.com.cn/thread-325059-1-1.html),进行行空板M10上py-xiaozhi的安装。
2.修改小智AI“角色介绍"
- 我是一个叫{{assistant_name}}的智能车。
- 当我听到关于前进、后退、左转、右转相关情景时,会对应只回复前进、后退、左转、右转,这些命令词。
3.py-xiaozhi修改代码,主要修改scr/application.py文件中内容
- from pinpong.board import Board,Pin
- from pinpong.extension.unihiker import *
- Board().begin()
- p_p5_out=Pin(Pin.P5, Pin.OUT)
- p_p8_pwm=Pin(Pin.P8, Pin.PWM)
- p_p6_out=Pin(Pin.P6, Pin.OUT)
- p_p16_pwm=Pin(Pin.P16, Pin.PWM)
使用pinpong库,驱动行空板M10扩展板M1、M2电机引脚。
- if text.find("前进")!=-1:
- p_p5_out.write_digital(0)
- p_p8_pwm.write_analog(150)
- p_p6_out.write_digital(1)
- p_p16_pwm.write_analog(150)
- if text.find("后退")!=-1:
- p_p5_out.write_digital(1)
- p_p8_pwm.write_analog(150)
- p_p6_out.write_digital(0)
- p_p16_pwm.write_analog(150)
- if text.find("左转")!=-1:
- p_p5_out.write_digital(1)
- p_p8_pwm.write_analog(150)
- p_p6_out.write_digital(1)
- p_p16_pwm.write_analog(150)
- if text.find("右转")!=-1:
- p_p5_out.write_digital(0)
- p_p8_pwm.write_analog(150)
- p_p6_out.write_digital(0)
- p_p16_pwm.write_analog(150)
- if text.find("停")!=-1:
- p_p5_out.write_digital(1)
- p_p8_pwm.write_analog(0)
- p_p6_out.write_digital(1)
- p_p16_pwm.write_analog(0)
在应用程序主类Application的_handle_tts_message函数中增加处理接收到指令后驱动电机进行相应运动。
4.行空板连接蓝牙音箱
使用bluetoothctl命令进行蓝牙音箱的连接,具体方法见附件bluetooth.py的内容。
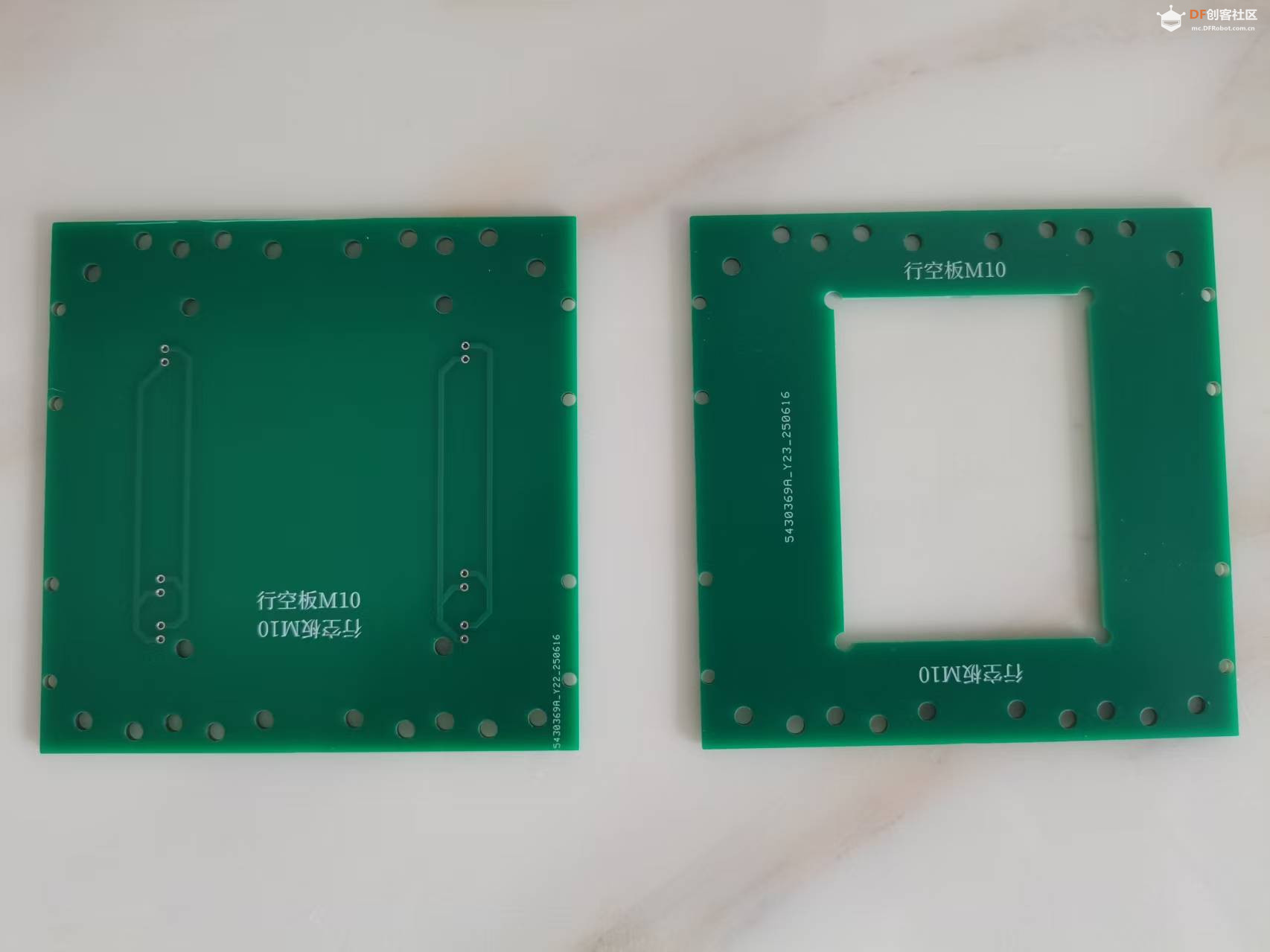
5.嘉立创打板
【程序附件】
 py-xiaozhi.zip py-xiaozhi.zip
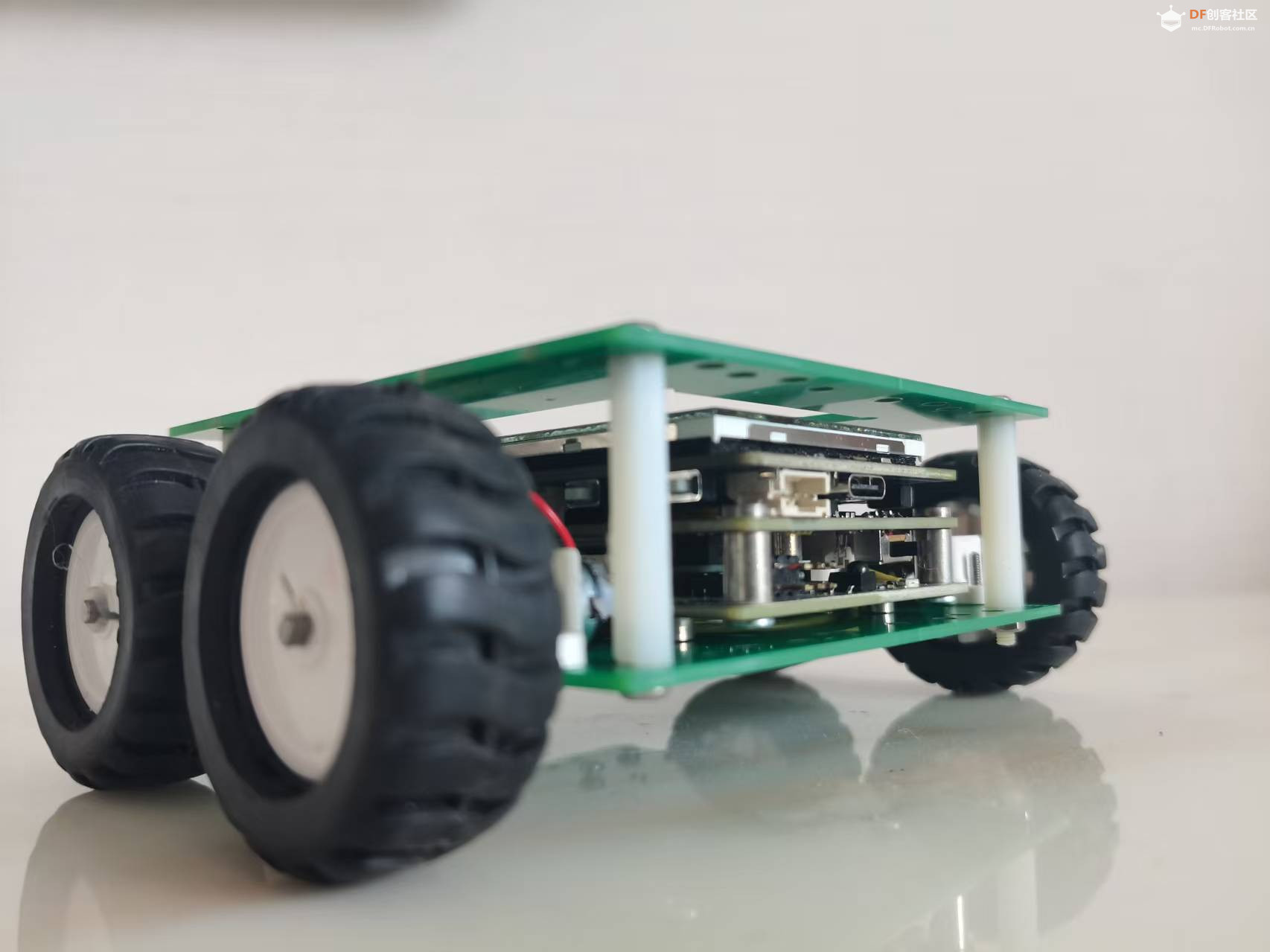
【车体组装】
1.安装电机车轮
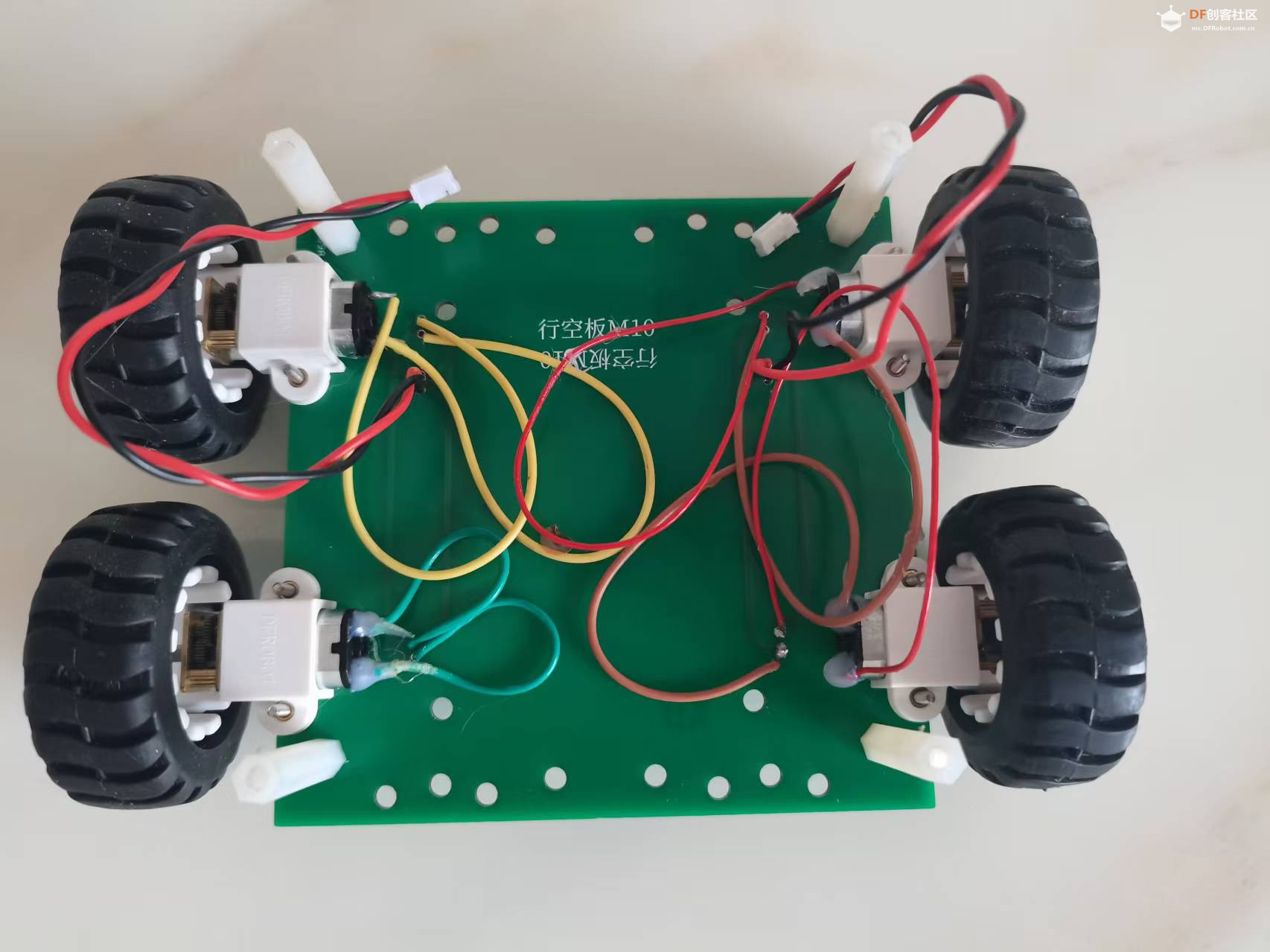
2.组装行空板M10
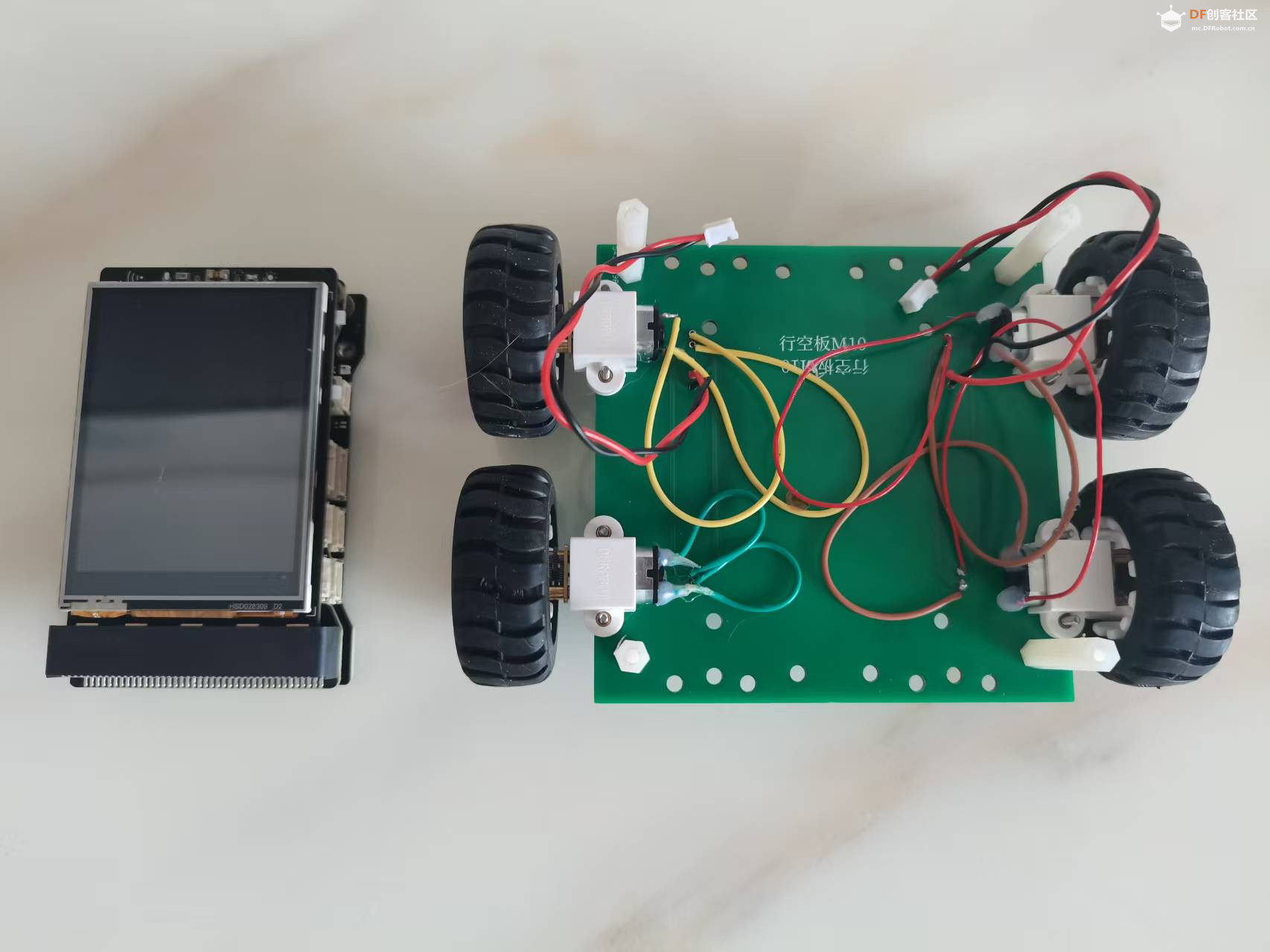
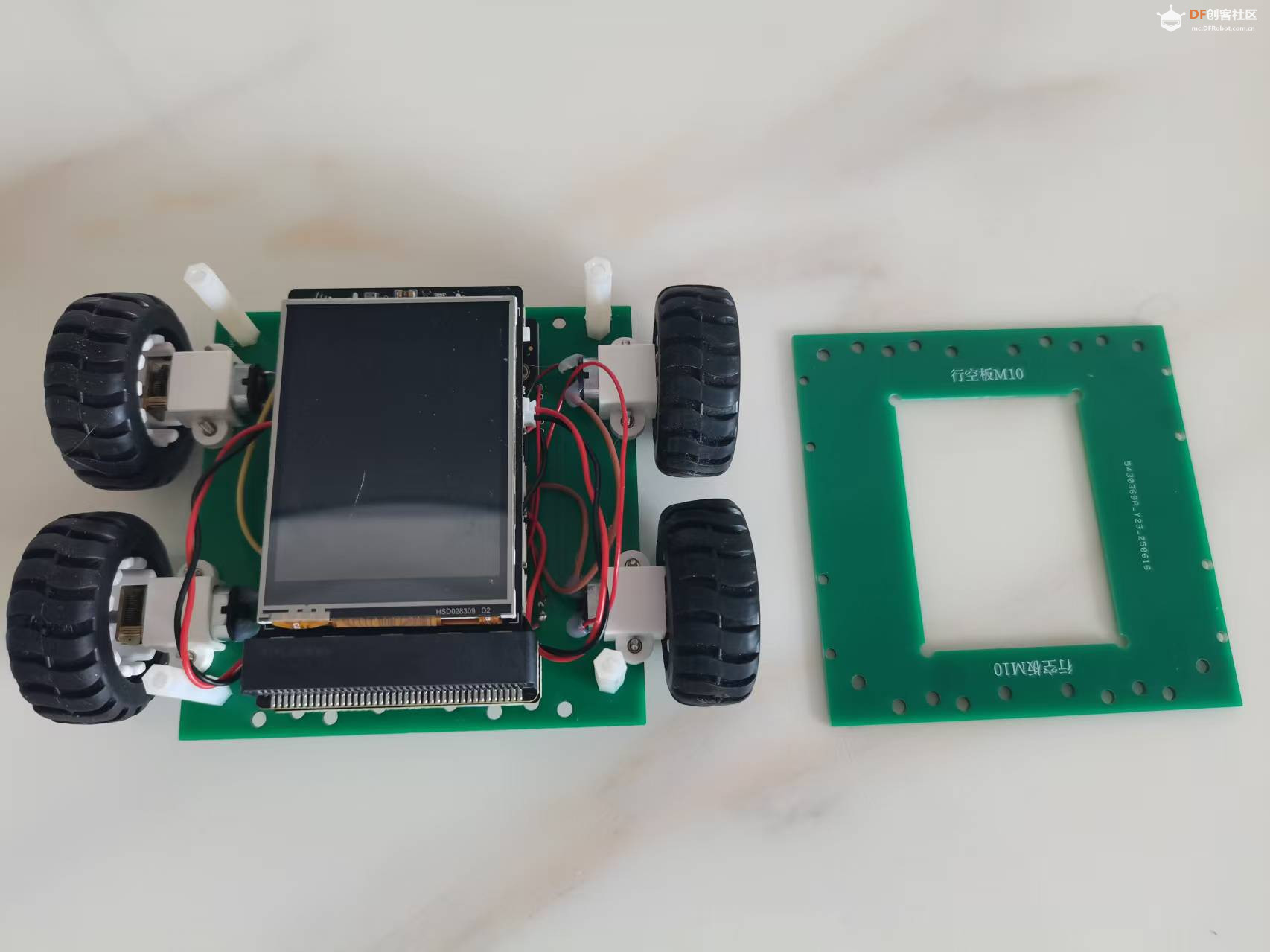
3.整体图



【演示视频】
| 



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






