|
1511| 2
|
[项目] 【Arduino 动手做】SLIDE全向轮机器人平台 |
|
S.L.I.D.E (Seamless locomotion in diverse environments) 是一个全向轮平台,旨在探索全能机器人的各种应用。 SLIDE 是一个开源项目,旨在教育和探索整体机器人的世界。SLIDE 可以在各种室内环境中实施,例如仓库、餐厅或医院,由于人员接近,传统机器人的导航更加困难。Holonomic 机器人可以轻松地在狭小空间内导航,因为它们可以向任何方向行驶。 该项目的目的不是用于商业应用,而是用于教育目的。一般来说,学生们会追求传统的驾驶机器人,如滑移转向或 Ackerman 驾驶。该项目旨在展示 holonomic 驱动器的酷炫应用,并可能增加对该领域的一些兴趣。 Arduino 将通过 USB 电缆连接到 RPI,并从 RPI USB 获取电源。扩展板将直接连接到 12V 电源。虽然盾牌位于 Arduino 的顶部,但只要将跳线设置为如下所示,它就不会从中汲取能量。 法典 我们将使用 Arduino IDE 对 Arduino 进行编程以控制步进电机,并使用 Processing 来运行纵杆接口。处理程序将在 Raspberry PI 上运行。在视频中,我正在使用手机通过 VNC 服务器连接到 RPI,您也可以使用您的 PC 并使用鼠标移动纵杆。 Arduino 代码 我们将使用 AccelStepper 库来处理电机控制和串行通信,以接收纵杆值。本指南将介绍必要的库、安装步骤和代码背后的逻辑。 必需的库 AccelStepper:此库允许您轻松控制步进电机。它支持各种类型的驾驶员,并提供速度控制、加速等功能。 MultiStepper:此库有助于同时管理多个步进电机。 安装库 要安装这些库,请执行以下步骤: 打开 Arduino IDE。 转到 Sketch > Include Library > Manage Libraries... 在 Library Manager 中,搜索 “AccelStepper” 并单击 “Install” 按钮。 同样,搜索“MultiStepper”并安装它。    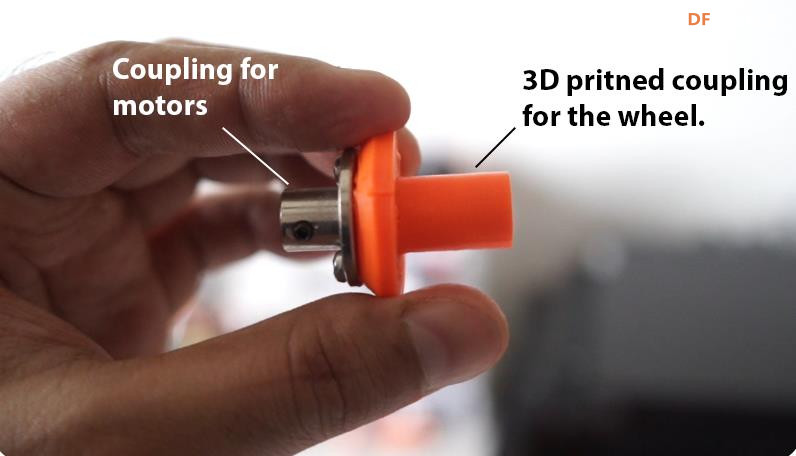 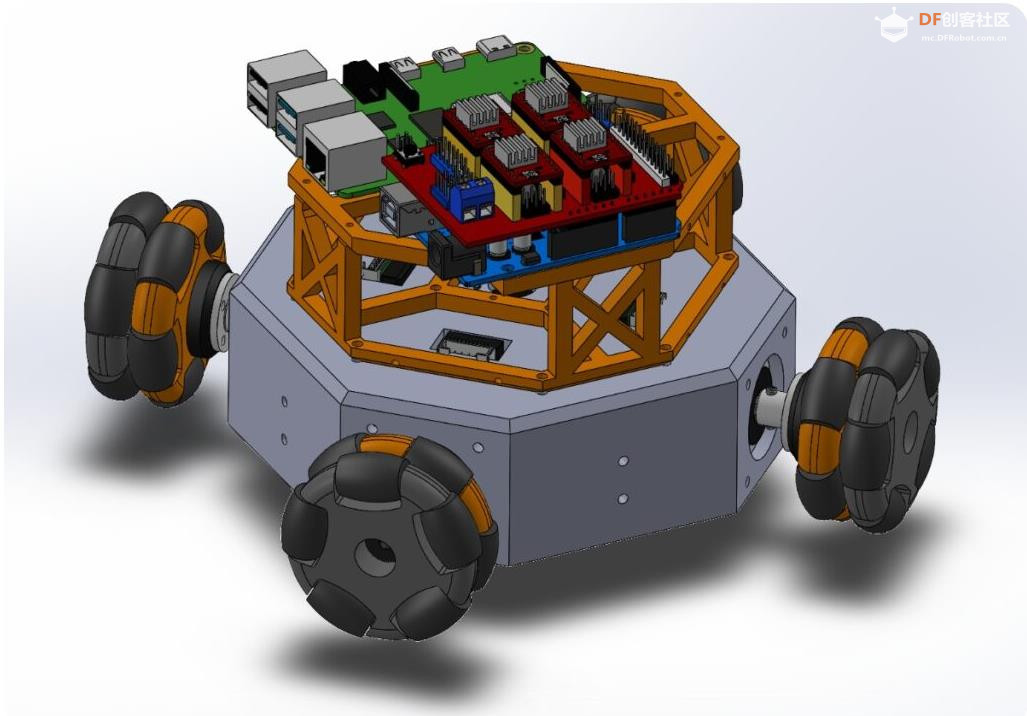 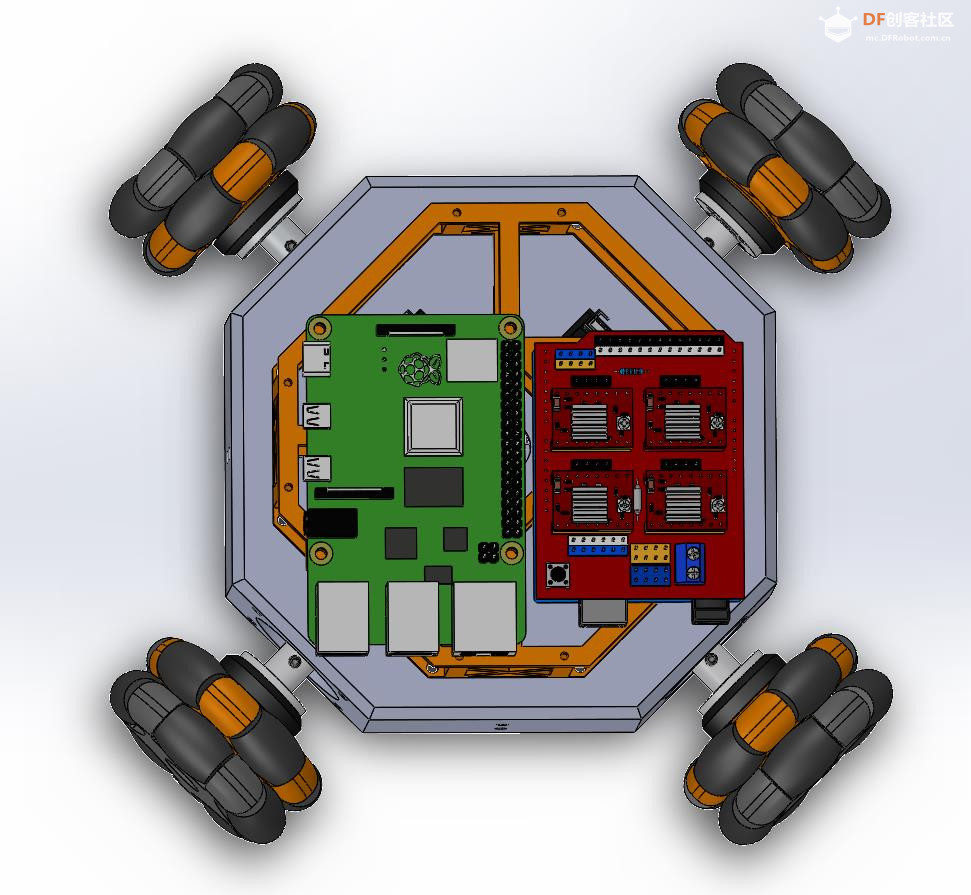   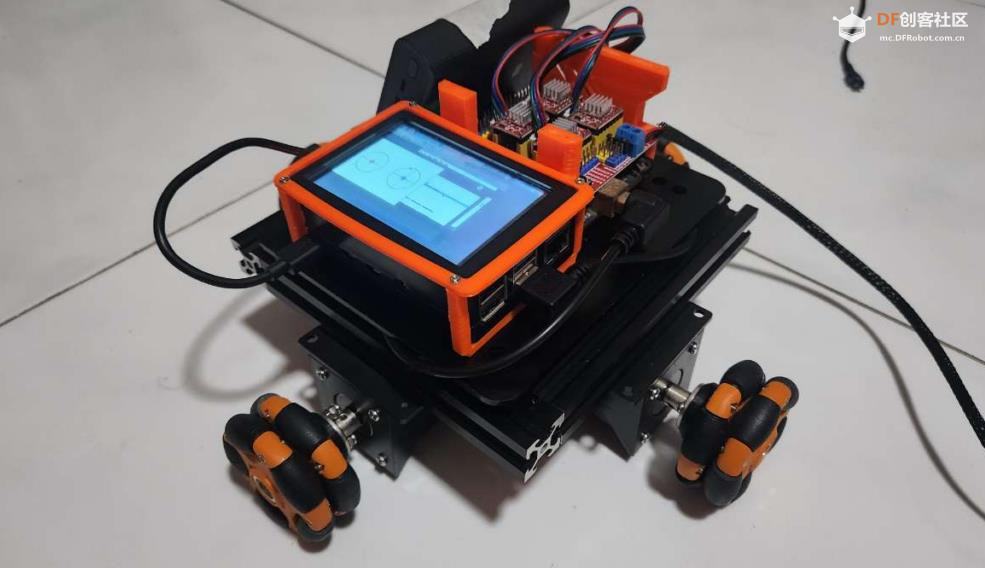  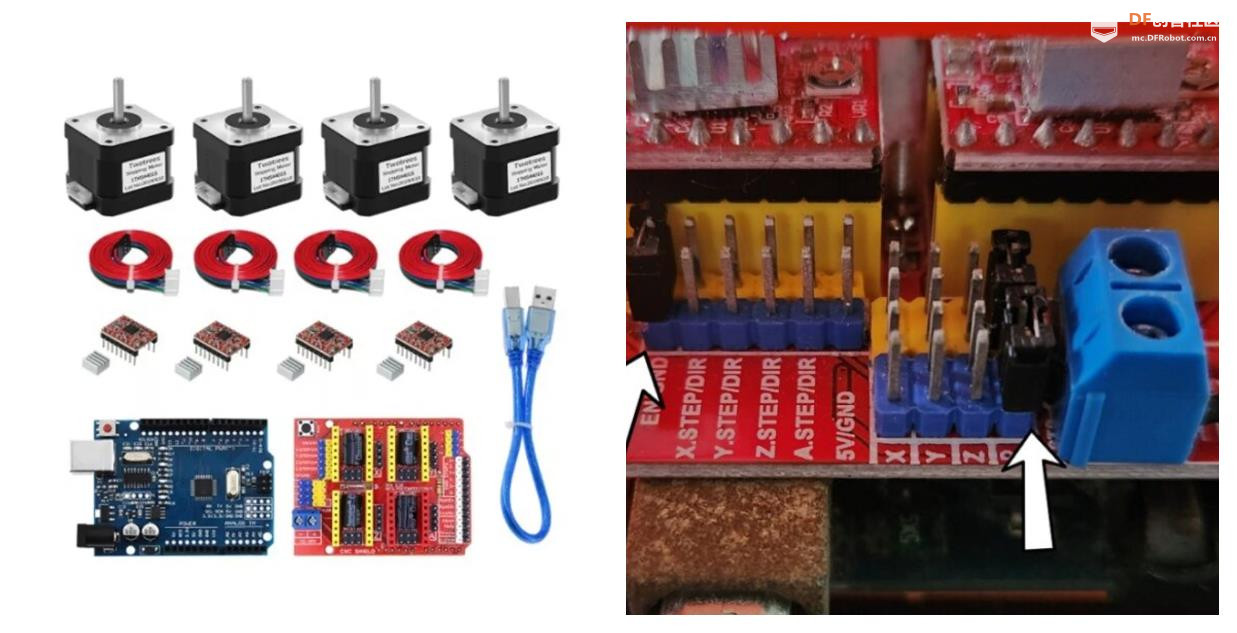 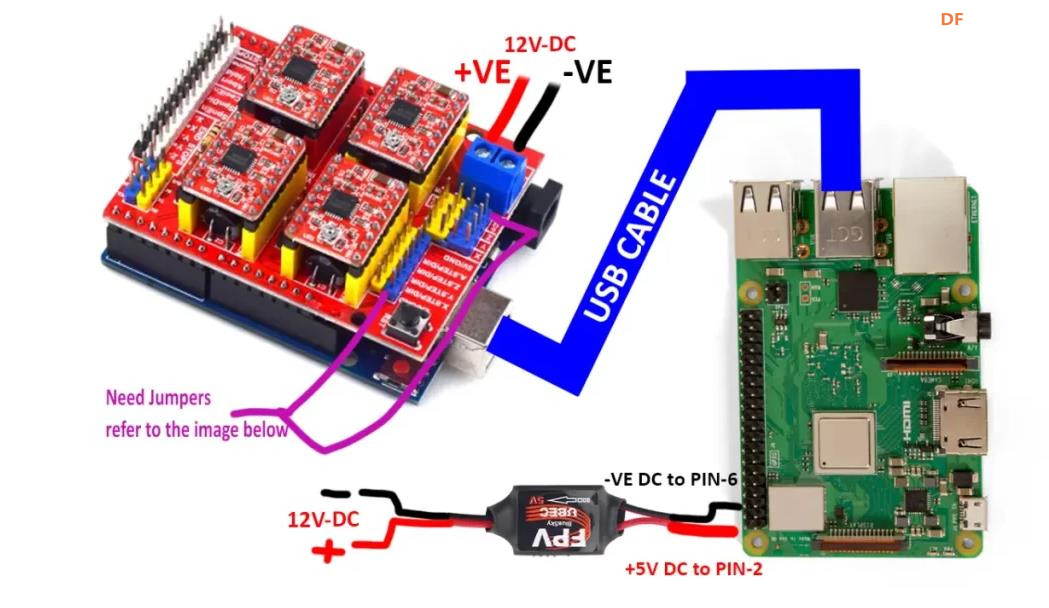 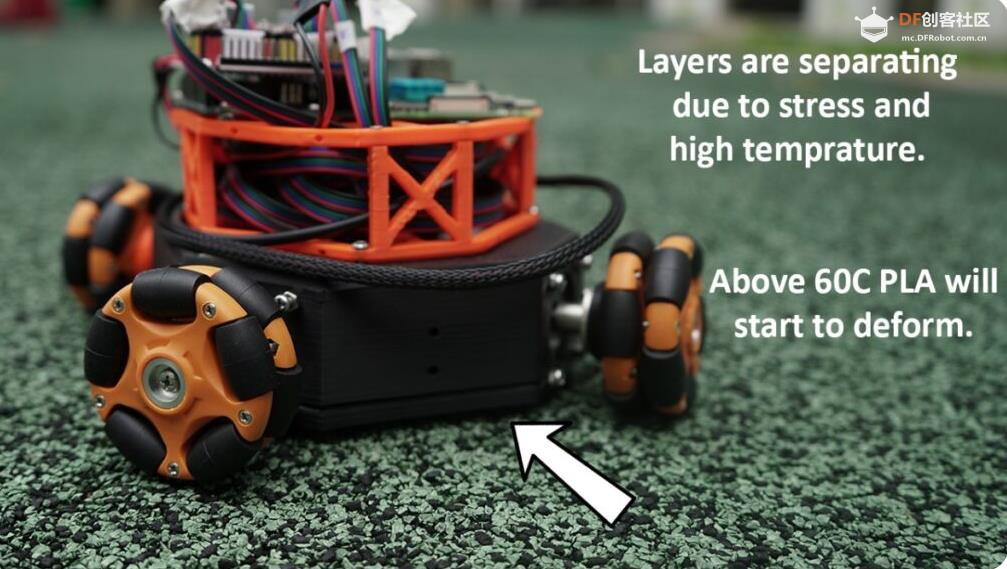 |
项目代码 |
|
【Arduino 动手做】SLIDE全向轮机器人平台 项目链接:https://benchrobotics.com/arduino/slide-omniwheel-robot-platform/ 项目作者:舒布汉姆·巴特 项目视频(5分钟):https://www.youtube.com/watch?v=CuAKjQ_rSYo&t=2s 项目代码:https://github.com/sastejugaad/SLIDE https://github.com/sastejugaad/S ... IDE_Joystick_v1.ino 3D 文件:https://grabcad.com/library/slide-omniwheel-robot-platform-1   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






