|
30| 2
|
[项目] 【Arduino 动手做】由操纵杆控制的 SCARA 机械臂 |
|
这是一个关于 SCARA 臂的项目,它由操纵杆控制并通过蓝牙模块发送位置。 这个项目诞生于我们决定使用 Arduino Uno 制作一个小型机械臂,该机械臂由一个按钮控制(用于控制伺服器下降) 一个控制器由一个钢球和一个操纵杆组成(里面有两个电位器,每个电位器“驱动”一个伺服器)。 我们在网上看到后,决定制作一种“不寻常”的机械臂:SCARA。 零件组装 组装技巧:3D打印部件上的孔可能太小,无法安装热嵌件(这取决于热嵌件的外径,因此建议使用直径为3毫米或5毫米的嵌件),所以您必须在打印部件上钻孔,使孔达到嵌件的深度和直径。在我们的案例中,法兰上的孔也太小,所以我们不得不使用3毫米钻头进行钻孔。 组装 Scara 机器人的所有部件并不难。主要步骤如下: 1. 3D打印Scara的塑料部件(我们使用了笛卡尔3D打印机); 2.安装插件(最简单的方法是用烙铁加热); 3. 将第一个 DS3218MG 伺服器放入“底座”中,并将“顶部”部件放在其上,然后用 M4x10 螺钉(用于伺服器)和 M4x20 螺钉(用于“顶部”)挡住这些部件; 4. 用四颗M3x15螺钉和螺母将“机械臂”下侧的法兰挡住(螺母将固定在舵机和法兰之间)。然后将一个垫圈和一个M3x15螺钉放入中间的孔中; 5. 将钢球放入其座中,然后将“臂”放在其上(对于“分配器”部分重复这两个步骤(4-5)); 6.用四颗M4螺丝将另一个DS3218MG伺服器固定在“分配器”上; 7.将SG90(倒置)放在分配器的支架上,用热胶将其封住; 工作原理 Scara 的操作过程非常简单。操纵杆中有两个电位器(也有一个按钮,但我们决定在本项目中使用单独的按钮),机器人的整个机构中有三个伺服器(两个“大”且强大的伺服器和一个小的伺服器),因此我们决定用一个电位器驱动每个 DS3218MG,用按钮驱动另一个伺服器:更具体地说,每当电位器到达其一端时,伺服器就会向右或向左旋转 5°(取决于电位器到达的一侧),并且每次按下按钮时,较小的伺服器就会掉落一个钢珠。 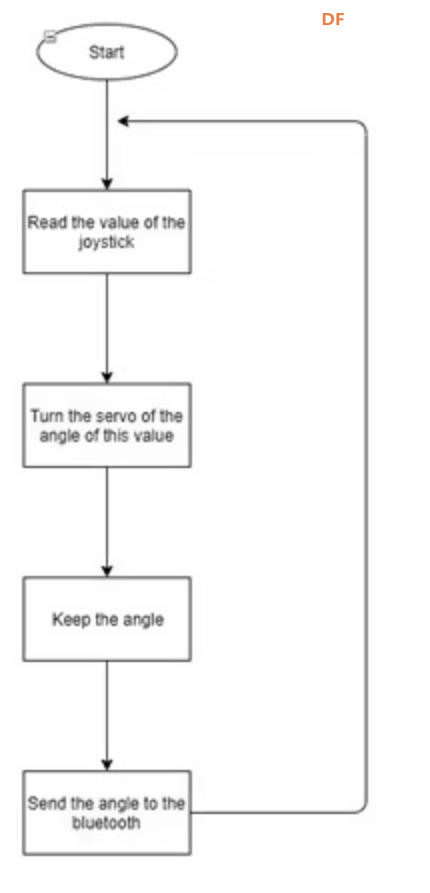  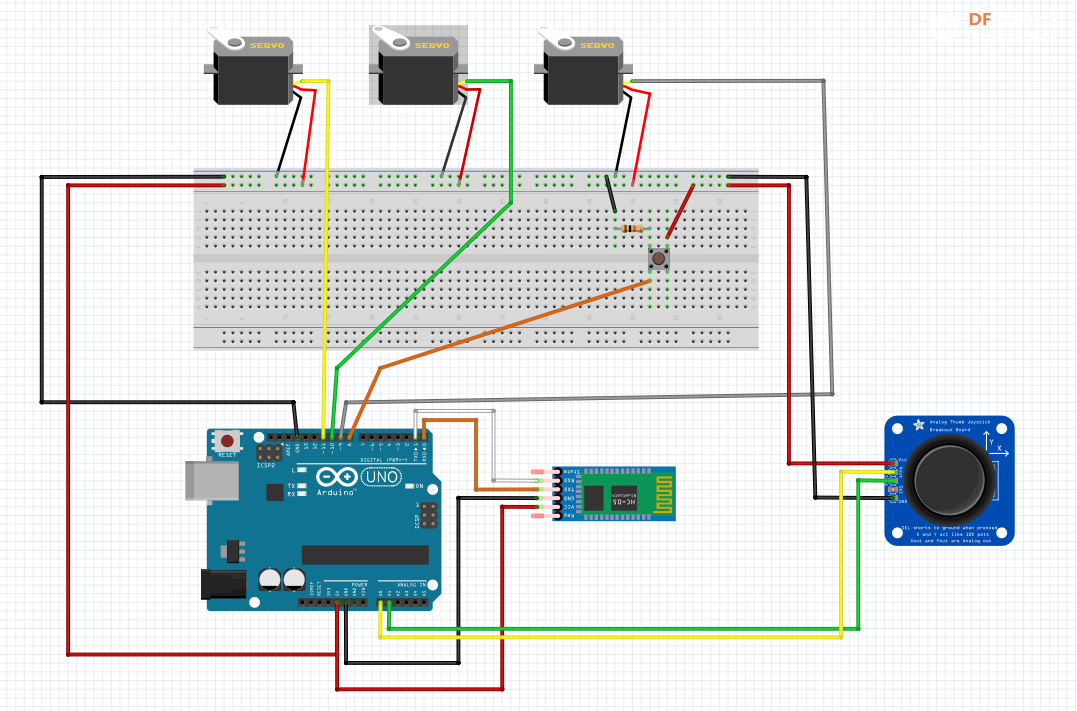    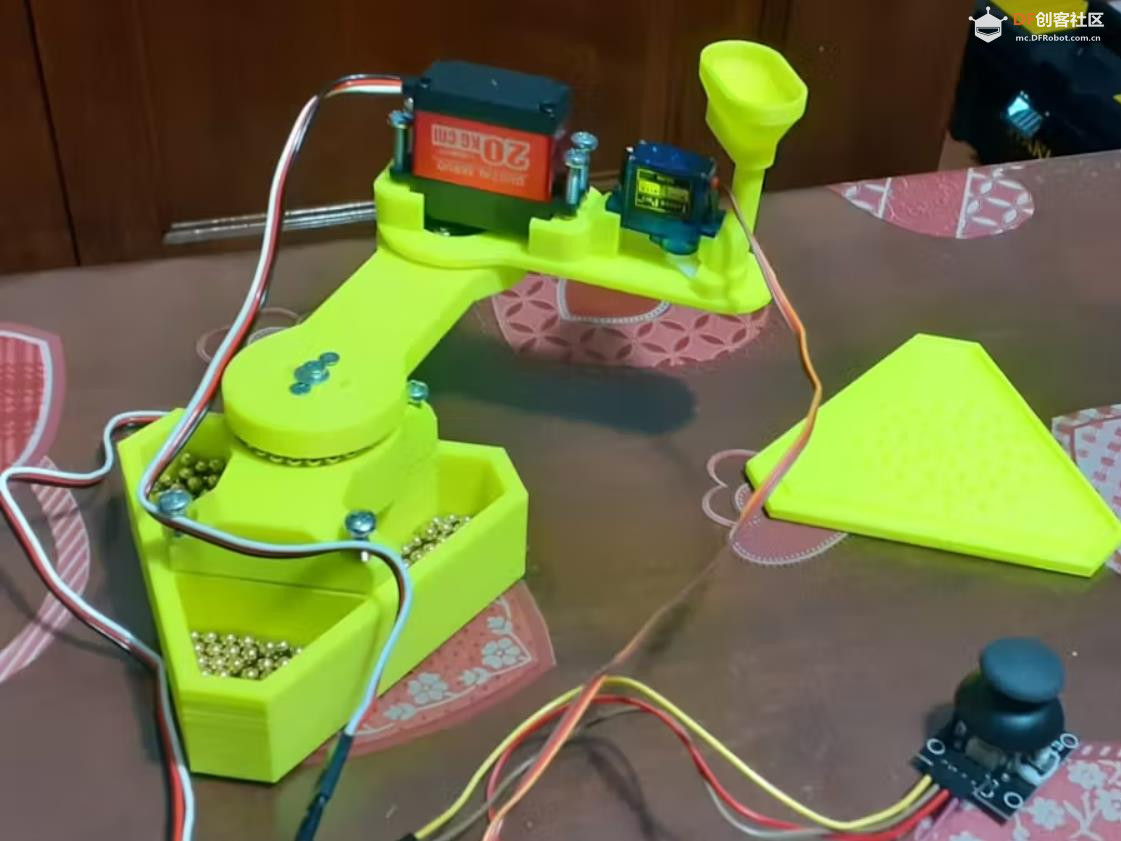  |
项目代码 |
|
附录 【Arduino 动手做】由操纵杆控制的 SCARA 机械臂 项目链接:https://www.hackster.io/311549/s ... -by-joystick-486870 项目作者:Fil2002•恩里科·泰斯塔2002 项目视频 :https://www.youtube.com/watch?v=odhzglLJJUI 项目代码:https://www.hackster.io/code_files/409605/download 3D 文件: https://hacksterio.s3.amazonaws. ... base_ONlQ7vP0SX.stl https://hacksterio.s3.amazonaws. ... /arm_pUrL8jj9RV.stl https://hacksterio.s3.amazonaws. ... nnel_ylHEXpXi9P.stl  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






