|
4714| 2
|
【自制无人机】“辛”路历程(二)电机转动 |
|
【自制无人机】“辛”路历程(二) 【前言】 继续昨天的学习,昨天知道了无人机需要飞控 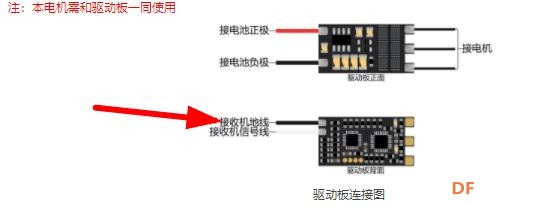 dfrobot说的接收机应该就是飞控。之前我也用Microbit接上,但我用的是数字口发高低电平,也听到了电机发出的声音,但不启动,当时不知是什么原因。 【网络查询】 1、飞控到无刷电调的信号是什么类型的信号 是pwm ,50hz的信号,周期20ms,高电平1ms~2ms就是油门的最小油门和最大油门 电调驱动电机转动需要两个步骤: (1)先给电调最大油门,你会听到“哔哔”; (2)“哔哔”后你再给电调最小油门,会听到”哔哔毕“,然后是一声较长的”毕“; (3)这时电调就准备好了,给一个1~2ms范围内的油门就可以转动了 PWM的介绍: PWM是一种调制方式,那么为什么会有这种方式存在?大家可能知道Arduino有模拟输入引脚,这些引脚是通过A/D转换操作的,而一般的数字引脚却只能输入HIGH或LOW电平,那么中间电平可否输出呢?比如2v的电平如何输出?于是PWM应运而生。PWM的高明之处在于:它输出的仍然是HIGH或者LOW电平,但可以间歇性周期性输出,则利用取平均值的方法,可以达到满意的输出效果。一个简单的例子:在0~5s内输出5v的电平,那么0~5s的平均电压就是5v,而倘若我在0~2.5s输出5v,在2.5~5s输出0v(占空比50%),那么这5s内平均电平就是2.5v,显然可以达到我们想要的效果。但仍有问题:倘若你的周期很长,就像上面例子所说,周期5s,点亮一个LED灯(LOW亮,HIGH灭),那么LED灯显然是前2.5s灭,后2.5s亮,显然达不到调灯暗亮的效果。但当周期被缩小之后比如20ms,这时候亮与灭只是很短时间内的事,肉眼根本看不到亮灭的变化,因而LED灯表现的就是亮度变暗。于是我们知道:PWM调制的周期一般比较短。PWM只是用数字输出替代模拟量输出,因此单方面还是不行的,这就要求我们的设备还要支持PWM的调制。(比如舵机等)。因而PWM的周期也不能任意短,还需要满足我们设备的调制要求。 【个人测试】 使用Microbit向电调发pwm信号。  到这不知怎么设置了,再查资料,多数是介绍Arduino控制电调。好,换Arduino。 【Arduino测试】 [应用教程]Arduino控制电调 按上面的说法,“电调可以进入编程模式。而且电调首次使用,没调制好油门行程,也是不能驱动电机的。”此作者手头上并没有遥控器,于是改了一下代码,模拟设置油门行程。他的电机动了。但他使用的是好盈电调,我的电调是不是也是这样? 我试了一下他的代码,没有反应,不知是不是这段程序只是设置。电机不动,后面再研究。 接下来,这段代码让电机动起来了。 是这个帖子里的用Arduino控制无刷电机电调的最简方法 【程序代码】 [mw_shl_code=java,false] #include<Servo.h> // Using servo library to control ESC Servo esc; //Creating a servo class with name as esc int val; //Creating a variable val void setup() { esc.attach(9); //Specify the esc signal pin,Here as D9 esc.writeMicroseconds(1000);// initialize the signal to 1000 Serial.begin(9600); } void loop() { val=analogRead(A0); // Read input from analog pin a0 and store in val val= map(val, 0,1023,1390,1600); // mapping val to minimum and maximum(Change if needed)//这里我进行了调整,我发现角度传感器映射后,调到1410后电机开始启动,到1600以上后停转。这里是不是和我之前的设置有关? Serial.println(val); esc.writeMicroseconds(val);// using val as the signal to esc }[/mw_shl_code] 【连接图】 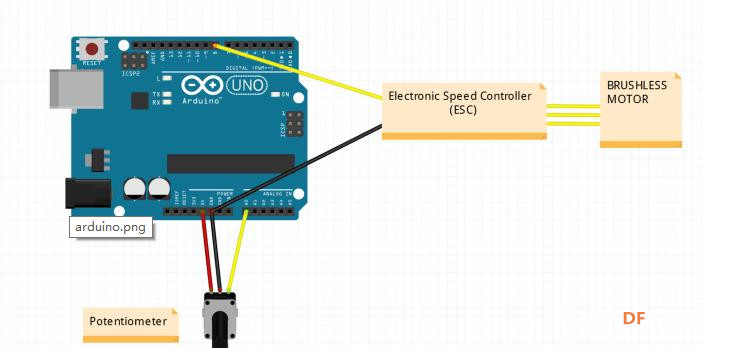 连接方式和上图一致,我用的主板是dfrobot“LEONARDO”。 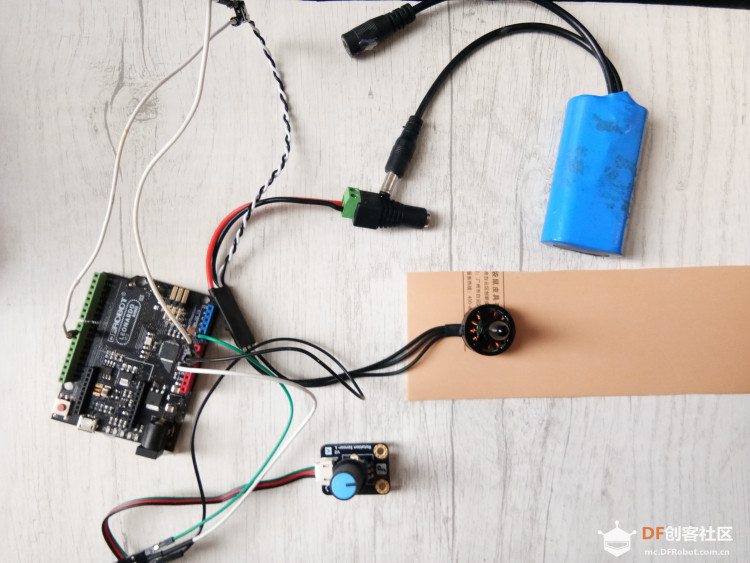 【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






