|
11535| 1
|
[项目] 【土壤湿度传感器】水养绿萝看护器 |
本帖最后由 云天 于 2020-10-2 17:00 编辑  绿萝是非常好的室内装饰植物,它的叶片翠绿,茎细软,一般在室内的高处放上一盆绿萝,让其茎蔓自然下垂,或者把长长的茎蔓摆出各种造型,既充分利用了空间,又净化了空气,又给室内装修增加了色彩,使室内极富生机。经科学研究发现,一盆绿萝在十平方的房间里就相当于一个空气净化器,它能吸收空气中的甲醛、苯和三氯乙烯等有害气体,特别是刚装修过的房子,最适合摆上几盆绿萝,绿萝的生命力非常顽强,绿萝的叶片肥大,能吸收二氧化碳呼出氧气,使室内的空气更加清新,室内氧气的增多能使我们变得更加精神。    【滤波算法】 经测试,此传感器,抗干扰能力还是比较强的。但在实际使用中,难免会出现特殊情况,产生干扰。为解决此问题,在程序中引入滤波算法。 滤波是将信号中特定波段频率滤除的操作,是抑制和防止干扰的一项重要措施。是根据观察某一随机过程的结果,对另一与之有关的随机过程进行估计的概率理论与方法。 1、限幅滤波法(又称程序判断滤波法) 2、中位值滤波法 3、算术平均滤波法 4、递推平均滤波法(又称滑动平均滤波法) 5、中位值平均滤波法(又称防脉冲干扰平均滤波法) 6、限幅平均滤波法 7、一阶滞后滤波法 8、加权递推平均滤波法 9、消抖滤波法 10、限幅消抖滤波法 【中位值平均滤波法】 我采用的是“中位值平均滤波法(又称防脉冲干扰平均滤波法)” 名称:中位值平均滤波法(又称防脉冲干扰平均滤波法) 方法: 采一组队列去掉最大值和最小值后取平均值, 相当于“中位值滤波法”+“算术平均滤波法”。 连续采样N个数据,去掉一个最大值和一个最小值, 然后计算N-2个数据的算术平均值。 N值的选取:3-14。 优点: 融合了“中位值滤波法”+“算术平均滤波法”两种滤波法的优点。 对于偶然出现的脉冲性干扰,可消除由其所引起的采样值偏差。 对周期干扰有良好的抑制作用。 平滑度高,适于高频振荡的系统。 缺点: 计算速度较慢,和算术平均滤波法一样。 比较浪费RAM。 [mw_shl_code=applescript,false]int Filter_Value; void setup() { Serial.begin(9600); // 初始化串口通信 randomSeed(analogRead(0)); // 产生随机种子 } void loop() { Filter_Value = Filter(); // 获得滤波器输出值 Serial.println(Filter_Value); // 串口输出 delay(50); } // 用于随机产生一个300左右的当前值 int Get_AD() { return random(295, 305); } // 中位值平均滤波法(又称防脉冲干扰平均滤波法)(算法1) #define FILTER_N 100 int Filter() { int i, j; int filter_temp, filter_sum = 0; int filter_buf[FILTER_N]; for(i = 0; i < FILTER_N; i++) { filter_buf = Get_AD(); delay(1); } // 采样值从小到大排列(冒泡法) for(j = 0; j < FILTER_N - 1; j++) { for(i = 0; i < FILTER_N - 1 - j; i++) { if(filter_buf > filter_buf[i + 1]) { filter_temp = filter_buf; filter_buf = filter_buf[i + 1]; filter_buf[i + 1] = filter_temp; } } } // 去除最大最小极值后求平均 for(i = 1; i < FILTER_N - 1; i++) filter_sum += filter_buf; return filter_sum / (FILTER_N - 2); }[/mw_shl_code] 我将以上Arduino代码转为Mind+。 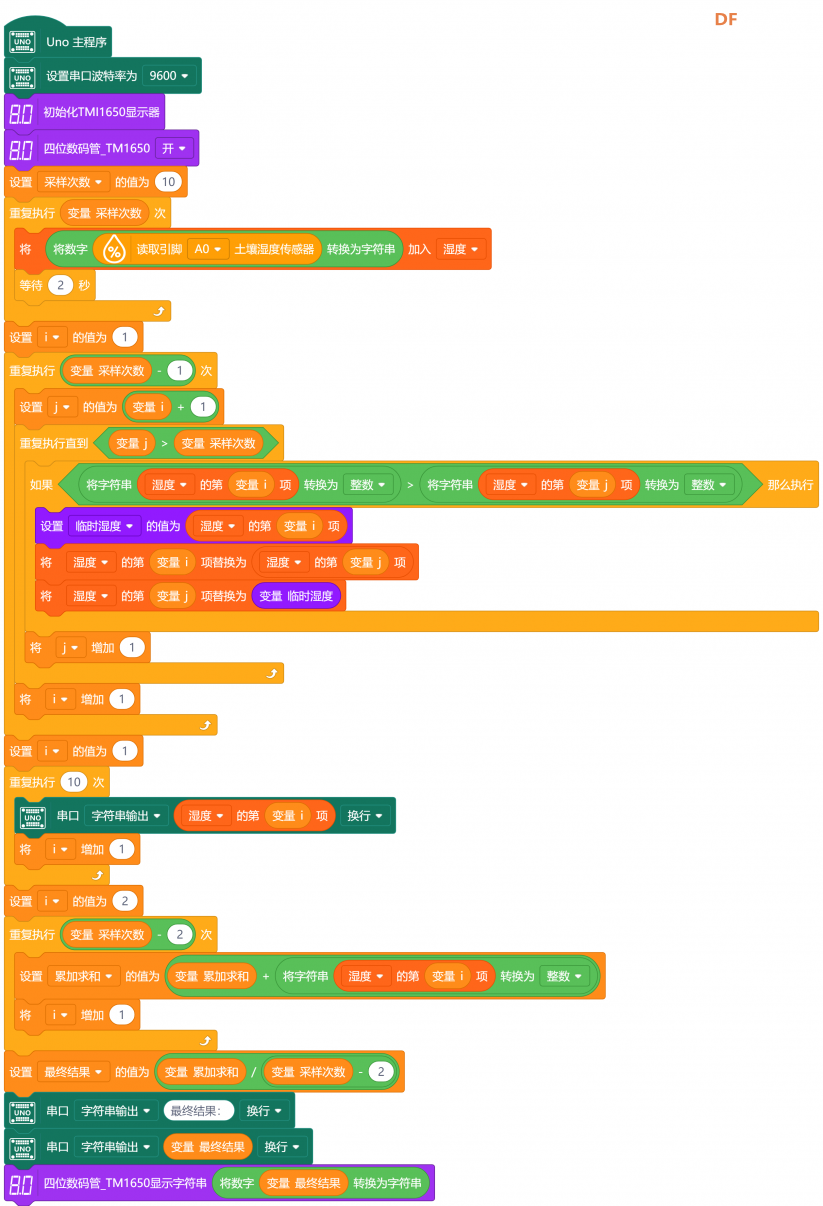 【测试】 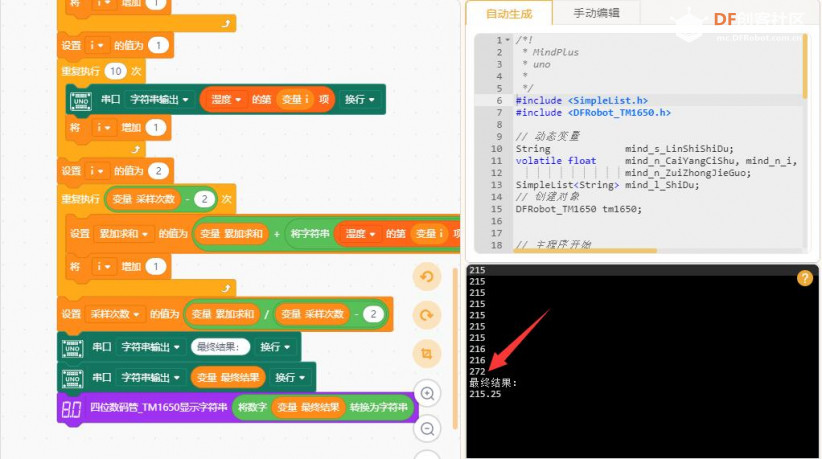 【演示】 将采样时间减少。可及时看到测试结果。 【完整代码】 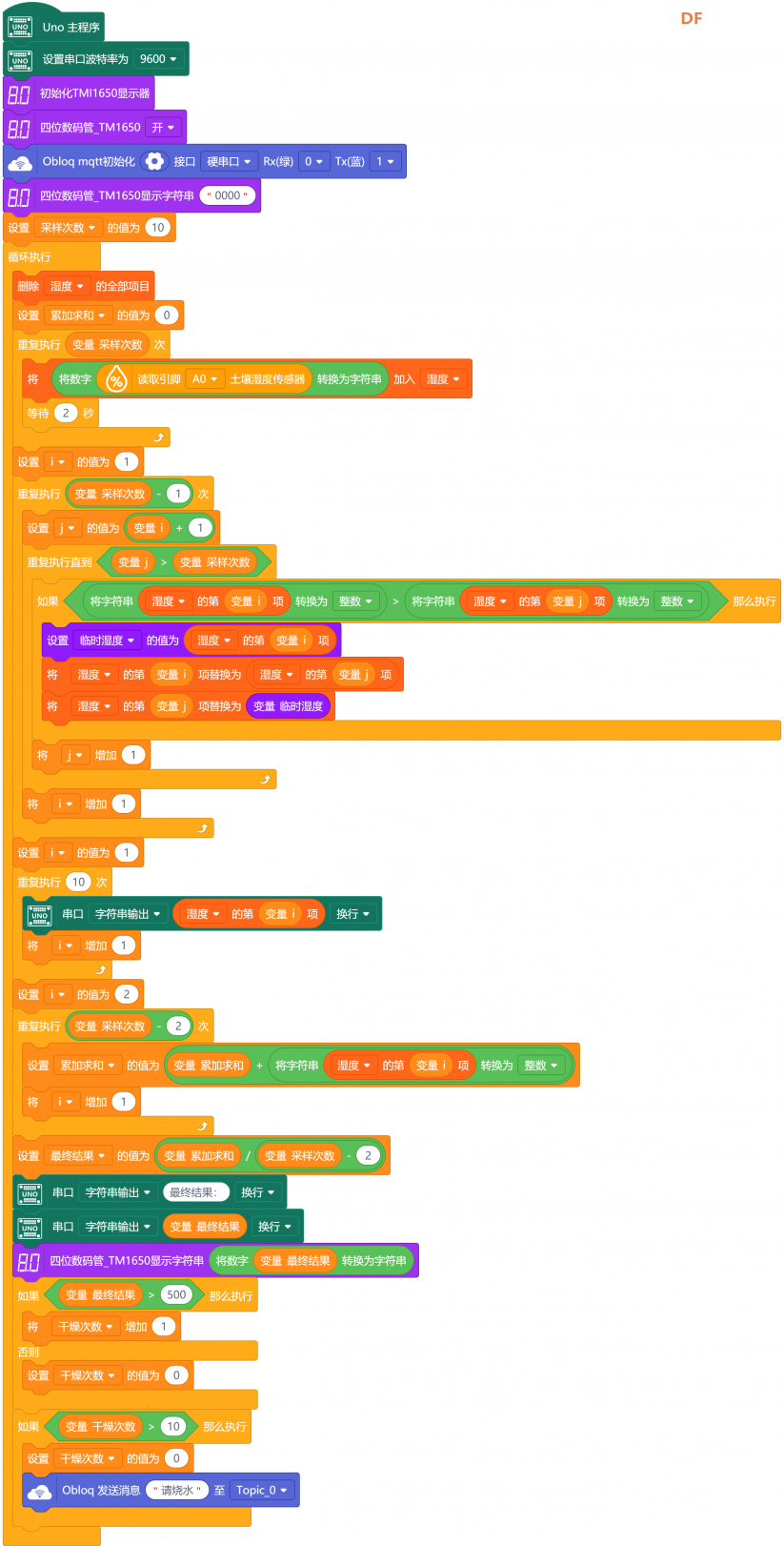 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






