|
|
[项目] 【Arduino】168种传感器模块系列实验(158)---QMC5883L三轴罗盘 |
|
安装QMC5883库,在网上搜到不少相关的库: keepworking /Mecha_QMC5883L https://github.com/keepworking/mecha_qmc5883l mprograms /QMC5883LCompass https://github.com/mprograms/QMC5883LCompass dthain /QMC5883L https://github.com/dthain/QMC5883L liyupengsGit /QMC5883LCompass https://github.com/liyupengsGit/QMC5883LCompass  |
|
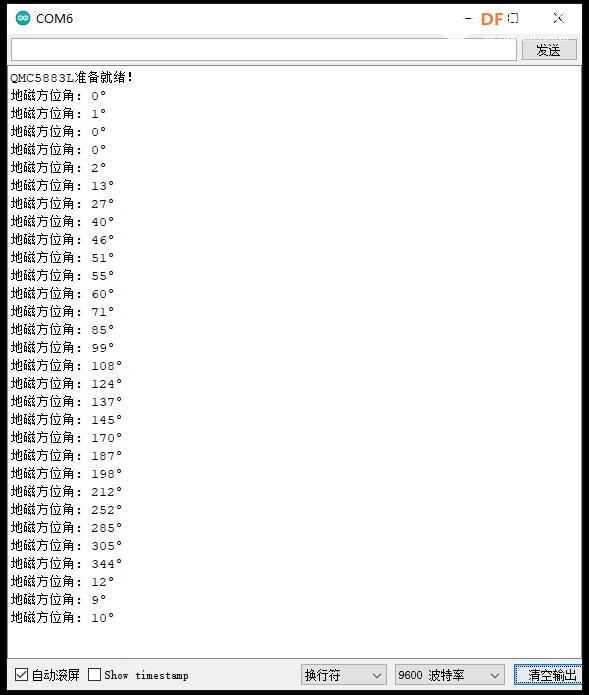
【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程) 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271 安装库:IDE--工具--管理库--搜索“QMC5883L”--安装 QMC5883LCompass 项目一:简易测量方位角度(数值在0-359度之间) 实验开源代码 |
|
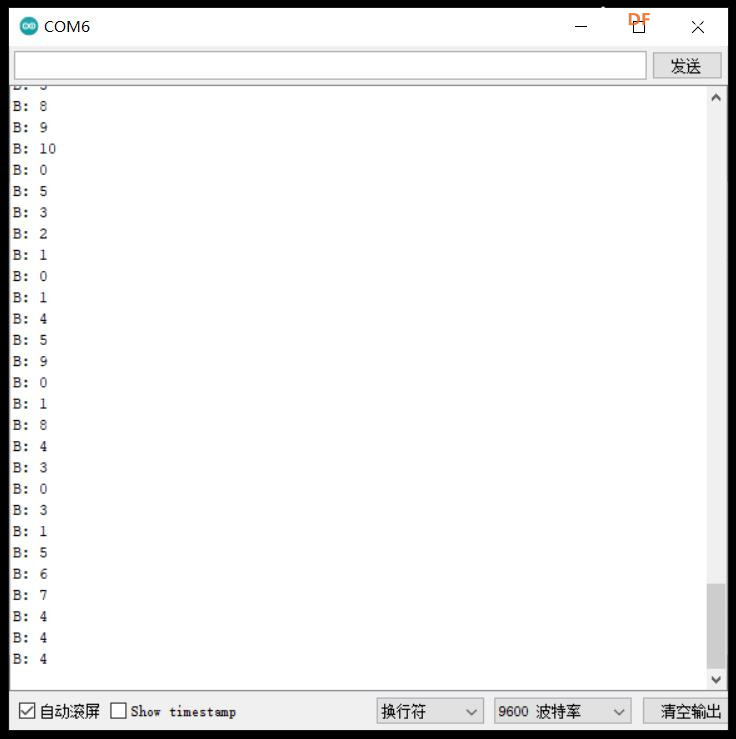
【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程) 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271 安装库:IDE--工具--管理库--搜索“QMC5883L”--安装 QMC5883LCompass 项目:简易测量方位角度(数值在0-11之间,每个数值间隔30度) 实验开源代码 |
|
知识点:方位角 又称地平经度(Azimuth angle,缩写为Az),是在平面上量度物体之间的角度差的方法之一。是从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,用“度”和“密位”表示。常用于判定方位、指示目标和保持行进方向。 从真子午线起算的为真方位角,通常在精密测量中使用,从磁子午线起算的方磁方位角,在航空、航海、炮兵射击、军队行进时广泛使用,从地形图的坐标纵线起算的为坐标方位角,炮兵使用较多。磁方位角与真方位角的关系式为:磁方位角=真方位角-(±磁偏角)。坐标方位角与磁方位角的关系式为:坐标方位角=磁方位角+ (±磁坐偏角)。 从标准方向的北端起,顺时针方向到直线的水平角称为该直线的方位角。以北点为起算点,由北点开始按顺时针方向计量。方位角的取值范围为0~360度,北点为0°,东点为90°,南点为180°,西点为270°。 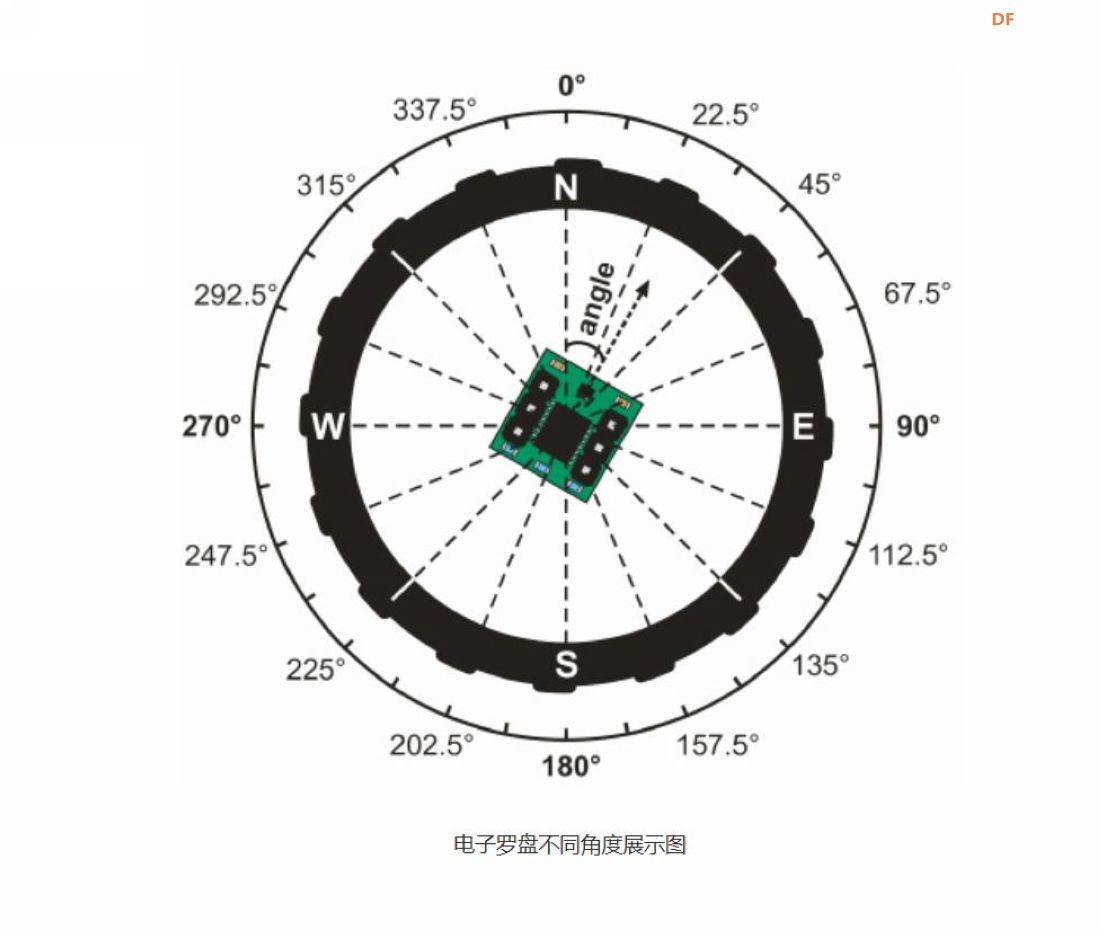 |
|
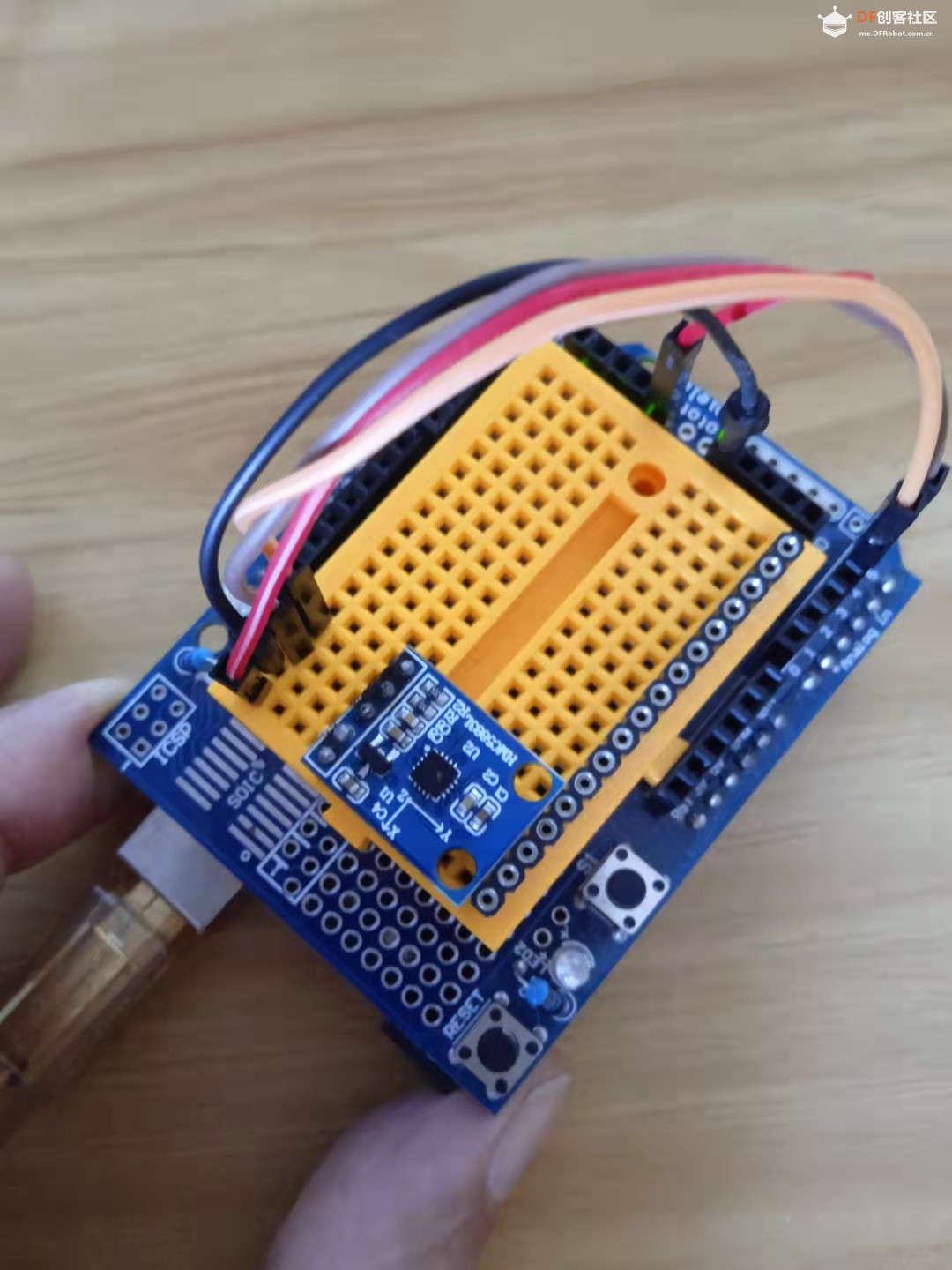
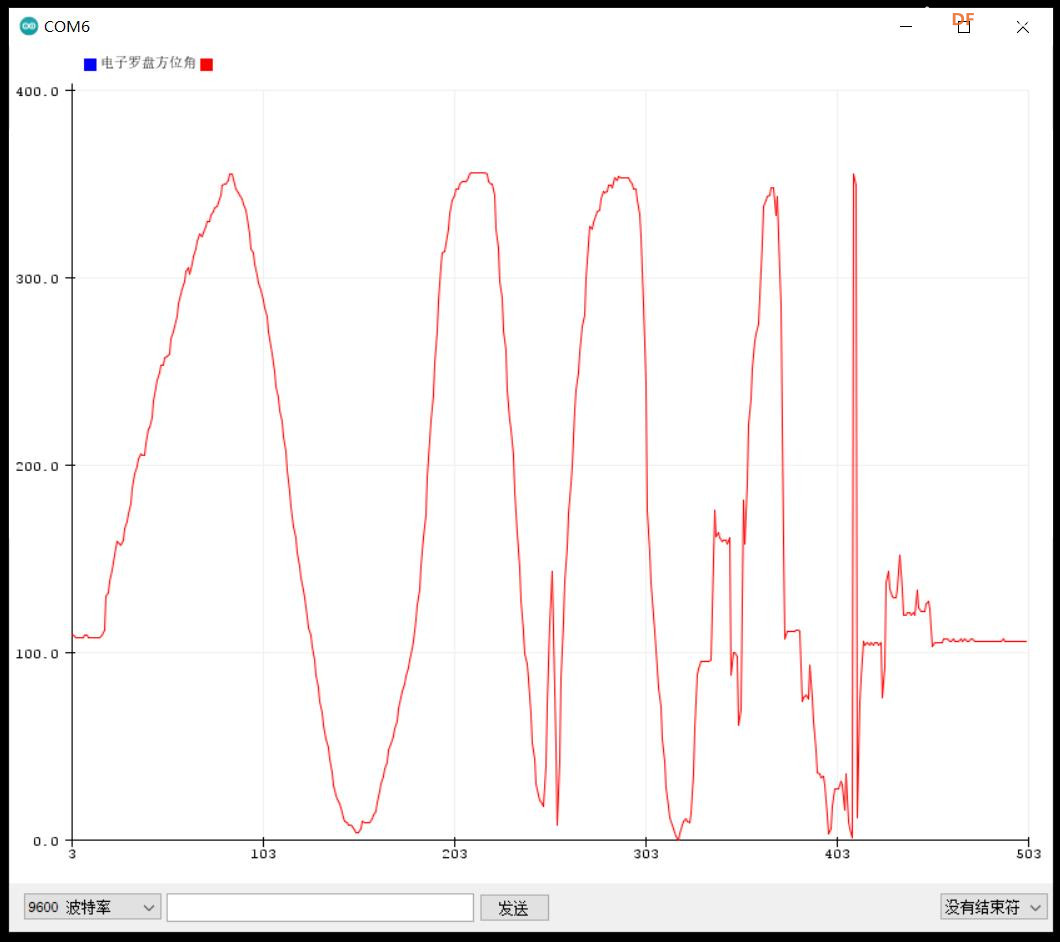
【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程) 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271 1、安装库:IDE--工具--管理库--搜索“QMC5883L”--安装QMC5883LCompass 2、项目三:通过串口实时绘制电子罗盘方位角的波形 实验开源代码 |
|
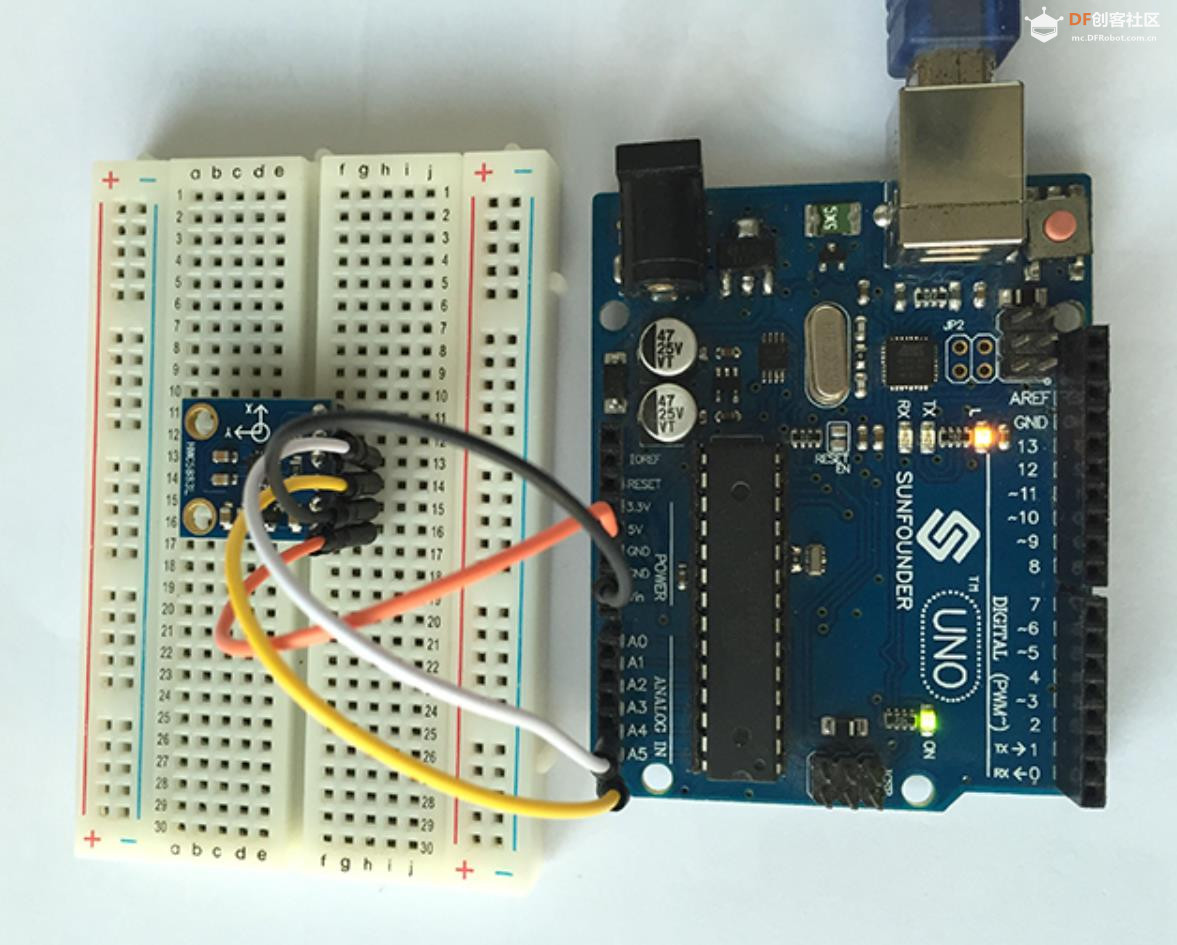
QMC5883L Compass 函数的几个使用要点 1、QMC5883L与Arduino Uno / Nano的连接 2、入门 首先,在程序顶部包括QMC5883L指南针库。 然后在setup()函数中添加: 3、获取X,Y或Z轴的数值 要获取X,Y或Z传感器的读数,只需调用所需的功能。 |
|
4、获取方位角的数值 要获取计算出的方位角(罗盘度)值,只需调用getAzimuth();。 5、获取方向/方位 QMC5883L指南针库可计算传感器指向的方向范围和方向。您可以调用两个函数。 要获取传感器面向的方向的12点值,可以调用getBearing(azimuth)。这会将罗盘的360度范围划分为12个部分,并按顺时针顺序返回值0-11。在这种情况下,0 = N,3= E,6 = S,9=W。如果您希望滚动自己的方向输出功能而不需要计算,则此功能很有用。 要获取传感器指向方向的12点文字表示,可以致电getDirection(azimuth);。这将产生一个char数组[3],其中的字母代表每个方向。由于我们无法返回数组,因此需要通过引用传递值。 如果要打印这些值,可以这样: |
|
本帖最后由 驴友花雕 于 2021-9-29 15:38 编辑 6、更改I2C地址 要在调用compass.setADDR(BYTE_VALUE);之前更改I2C地址呼叫,compass.init();如下所示: 7、更改模式,数据速率,比例,采样率 您还可以更改QMC5583L芯片的模式,灵敏度,采样率和输出率。等等,只需在调用compass.setMode(MODE, ODR, RNG, OSR);后调用即可compass.init()。请注意,每个值必须是一个字节。设置每个模式的值在预设中,并取自QST QMC5583L数据表。  |
|
8、精细QMC5583L传感器输出 在传感器读数似乎反弹的情况下,平滑可以提供帮助。QMC5883L指南针库使用滚动平均值功能来存储(N)个传感器读数并返回每个轴的平均值。该平均还对方位角和方向输出进行平滑处理。 如果启用,该功能的第二部分将采用内部滚动逐步通过的当前替代和替代,将其从总体上中删除。这可以帮助消除在错误的读数中可能发生的替代的高点和低点。 应该注意的是,内置的平滑功能将导致额外的处理时间。 在循环之前启用平滑调用。 步骤:int,使结果平滑的步骤数。1到10的有效值。更高的步长等于更平滑,但处理时间缩短。 *:启用此功能将使平滑效果更好,但处理时间缩短。* |
|
9、校准QMC5583L传感器 QMC5883LCompass库包含校准功能和实用程序大纲,可帮助您校准QMC5883L芯片。校准是一个两步过程。 步骤1:运行校准程序 a、确保已连接QMC5883L芯片。 b、在示例> QMC5883LCOMPASS>校准下找到随附的校准草图。 c、将校准草图上传到您的arduino,然后打开串行监视器。 d、校准过程开始时,通过移动传感器来伴随屏幕上的指示。 c、收集完所有校准数据后,复制副本的代码 可能需要保存它以备将来参考。 步骤2:使用校正资料 a、项目的程序,将然后复制的代码行直接插入到compass.init()调用下方。 b、照常使用QMC5883LCompass库。 建议您使用提供的校准草图来生成传感器的预设和替代,但也可以使用该 |
|
实验开源代码 项目四:通过串口实时绘制电子罗盘方位(12等分)的波形 说明:实时数值 0 = N,3 = E,6 = S,9 =W |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






