|
|
[项目] 【Arduino】168种传感器模块系列实验(158)---QMC5883L三轴罗盘 |
|
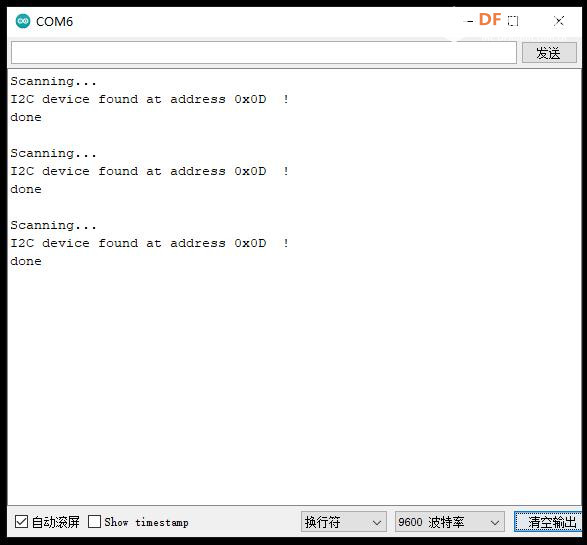
【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程) 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271 项目十二:使用简单的代码扫描三轴磁场传感器GY-271的 I2C 地址 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程) 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271 项目十三:尝试不使用驱动库来读取XYZ 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程) 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271 项目十四:QMC5883LCompass三轴磁力计罗盘传感器 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






