【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程)
实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271
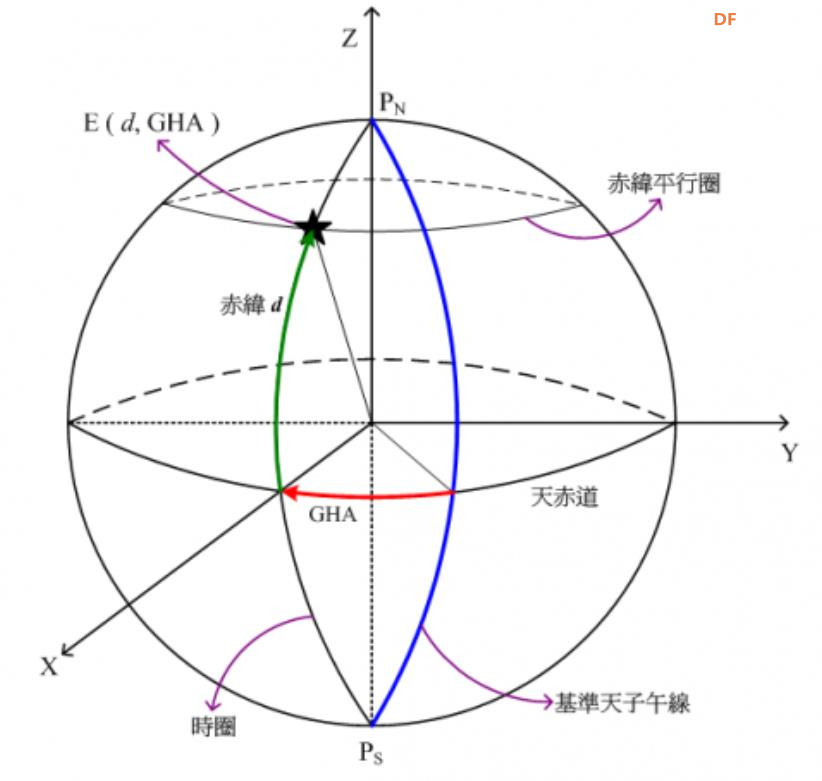
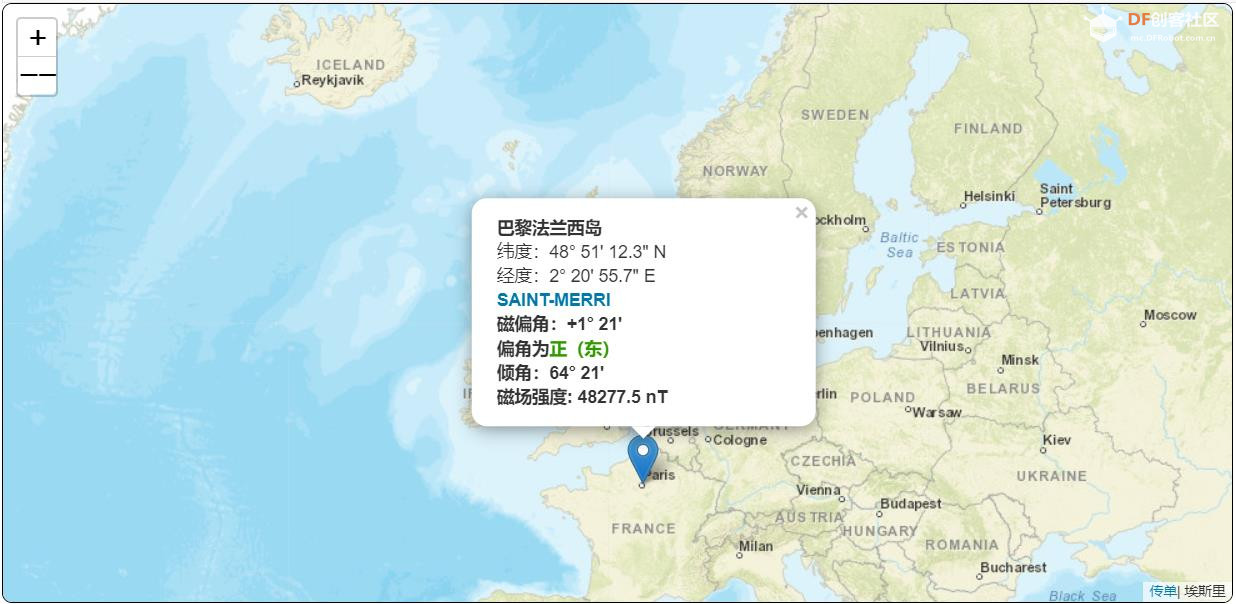
项目之十:根据当前位置来校正磁偏角
实验开源代码
- /*
- 【Arduino】168种传感器模块系列实验(资料代码+图形编程+仿真编程)
- 实验一百五十八:QMC5883L电子指南针罗盘模块 三轴磁场传感器GY-271
- 项目之十:根据当前位置来校正磁偏角
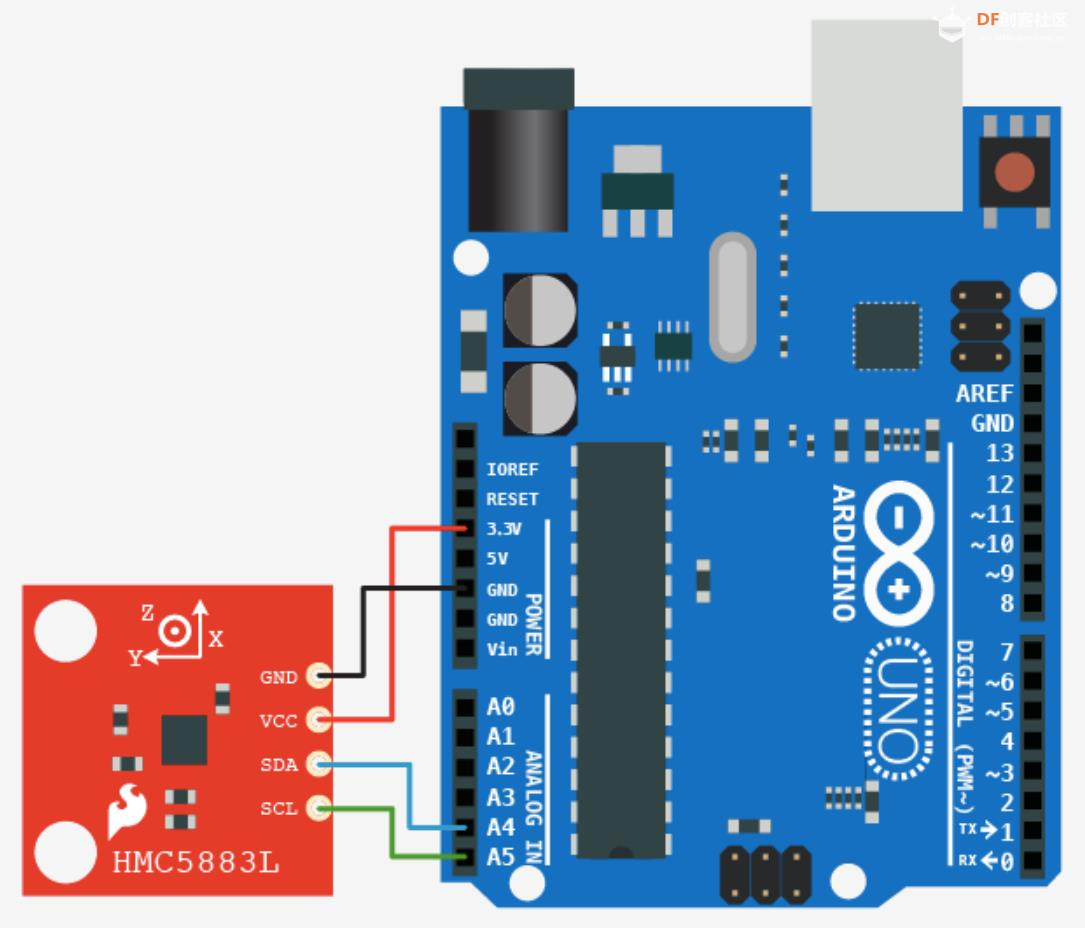
- 实验接线:
- 5883L-------------- UNO
- VCC------------------- 5V
- GND------------------- GND
- SCL ------------------- A5
- SDA------------------- A4
- DRDY------------------ N/C
- */
-
- #include <Arduino.h>
- #include <Wire.h>
- #include <HMC5883L_Simple.h>
-
- // Create a compass
- HMC5883L_Simple Compass;
-
- void setup() {
- Serial.begin(9600);
- Wire.begin();
-
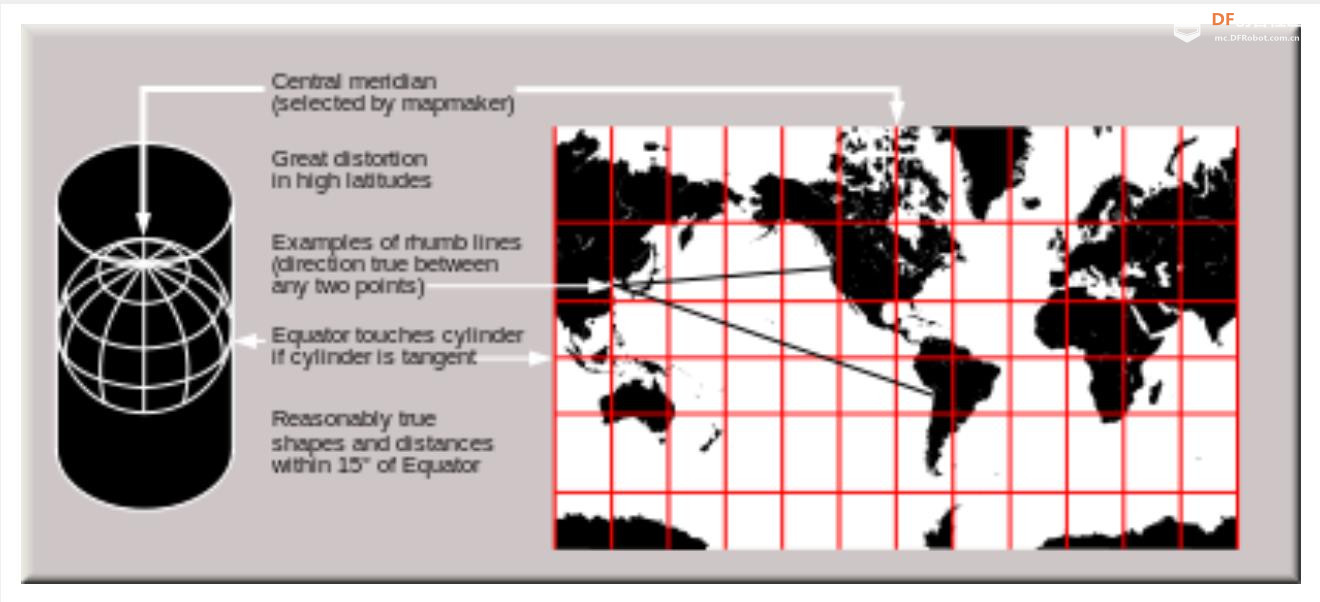
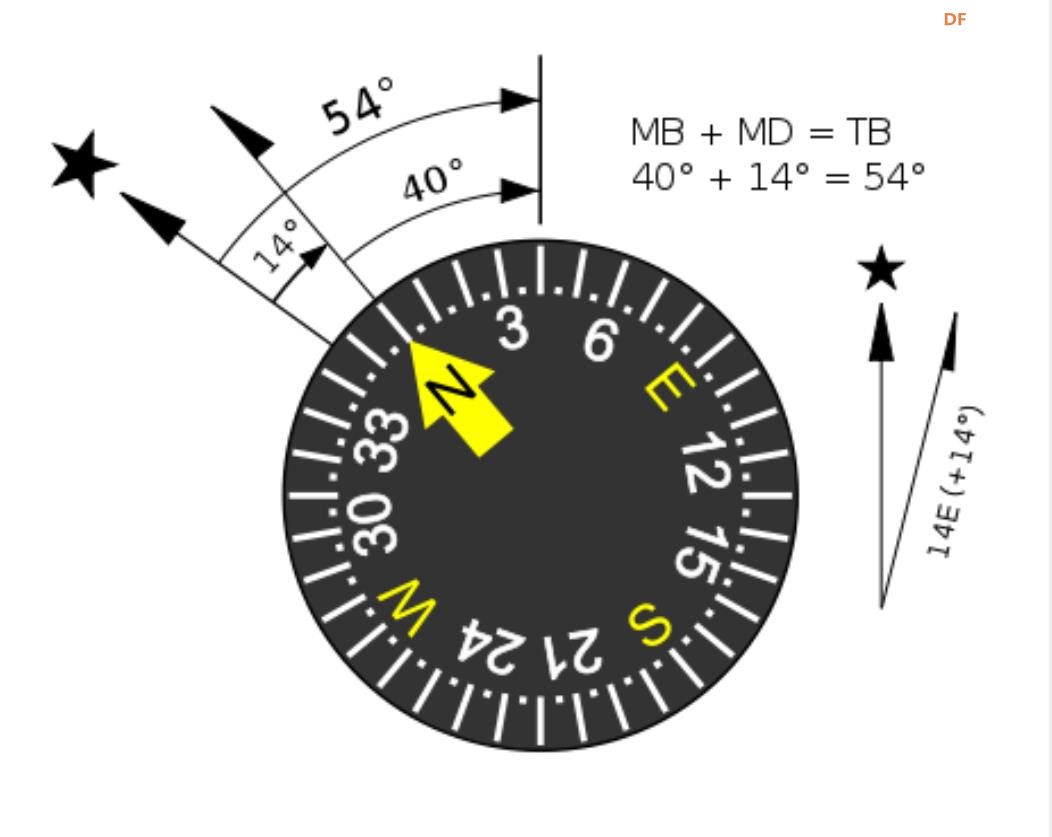
- // Magnetic Declination is the correction applied according to your present location
- // in order to get True North from Magnetic North, it varies from place to place.
- //
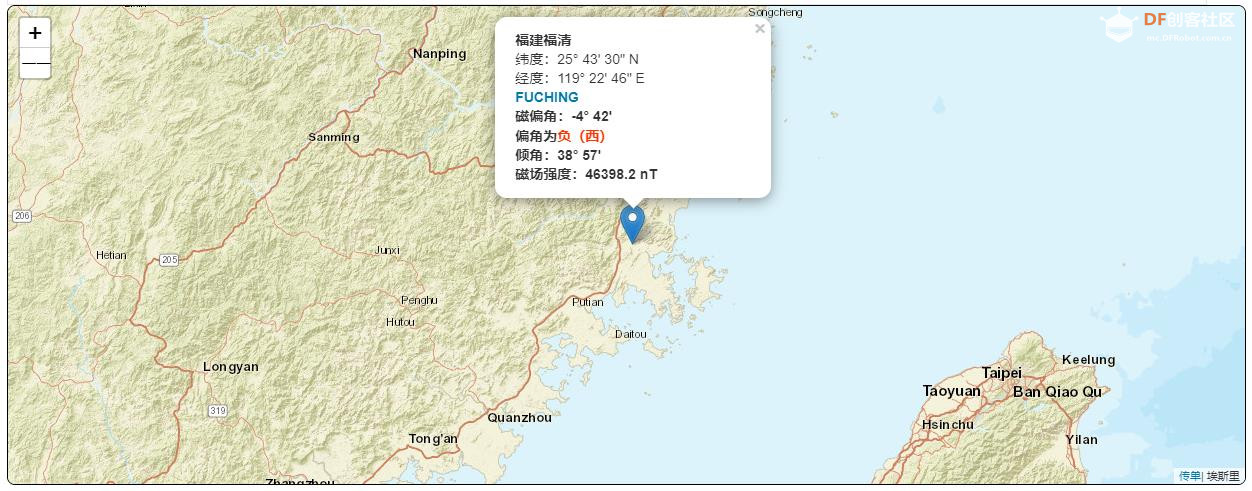
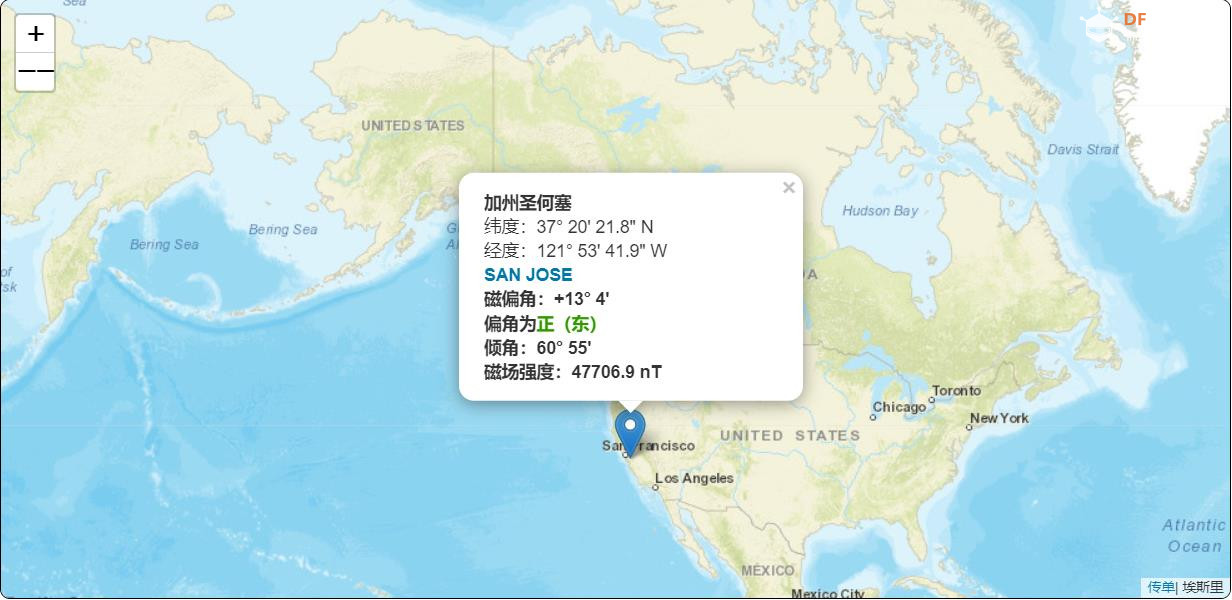
- // The declination for your area can be obtained from http://www.magnetic-declination.com/
- // Take the "Magnetic Declination" line that it gives you in the information,
- //
- // Examples:
- // Christchurch, 23° 35' EAST
- // Wellington , 22° 14' EAST
- // Dunedin , 25° 8' EAST
- // Auckland , 19° 30' EAST
- //
- Compass.SetDeclination(-0, 23, 'W');
-
- // The device can operate in SINGLE (default) or CONTINUOUS mode
- // SINGLE simply means that it takes a reading when you request one
- // CONTINUOUS means that it is always taking readings
- // for most purposes, SINGLE is what you want.
- Compass.SetSamplingMode(COMPASS_CONTINUOUS);
-
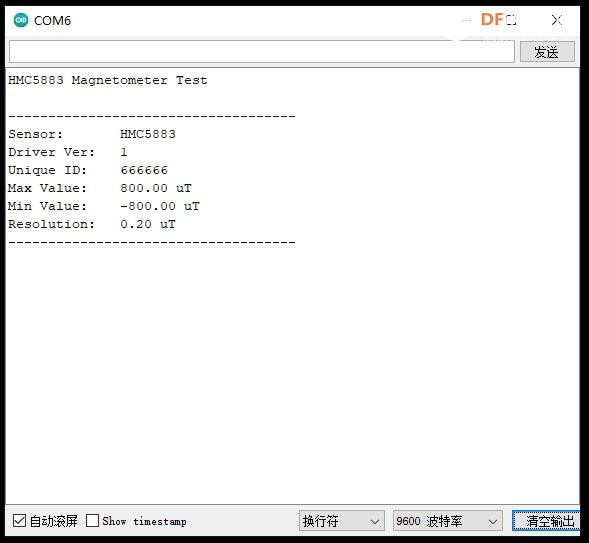
- // The scale can be adjusted to one of several levels, you can probably leave it at the default.
- // Essentially this controls how sensitive the device is.
- // Options are 088, 130 (default), 190, 250, 400, 470, 560, 810
- // Specify the option as COMPASS_SCALE_xxx
- // Lower values are more sensitive, higher values are less sensitive.
- // The default is probably just fine, it works for me. If it seems very noisy
- // (jumping around), incrase the scale to a higher one.
- Compass.SetScale(COMPASS_SCALE_250);
-
- // The compass has 3 axes, but two of them must be close to parallel to the earth's surface to read it,
- // (we do not compensate for tilt, that's a complicated thing) - just like a real compass has a floating
- // needle you can imagine the digital compass does too.
- //
- // To allow you to mount the compass in different ways you can specify the orientation:
- // COMPASS_HORIZONTAL_X_NORTH (default), the compass is oriented horizontally, top - side up. when pointing North the X silkscreen arrow will point North
- // COMPASS_HORIZONTAL_Y_NORTH, top-side up, Y is the needle,when pointing North the Y silkscreen arrow will point North
- // COMPASS_VERTICAL_X_EAST, vertically mounted (tall) looking at the top side, when facing North the X silkscreen arrow will point East
- // COMPASS_VERTICAL_Y_WEST, vertically mounted (wide) looking at the top side, when facing North the Y silkscreen arrow will point West
- Compass.SetOrientation(COMPASS_HORIZONTAL_X_NORTH);
- }
-
- // Our main program loop.
- void loop() {
- float heading = Compass.GetHeadingDegrees();
-
- Serial.print("Heading: \t");
- Serial.println( heading );
- delay(500);
- }
| 



 沪公网安备31011502402448
沪公网安备31011502402448



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






