|
3865| 2
|
【试用测评】pinpong板——MPU6050控制pgzero角色 |
|
本帖最后由 云天 于 2021-4-29 17:18 编辑 【pinpong板】 拿到这块板子,挺喜欢,板子做工比较精致。布局紧凑,合理。各种常用传感器都有,如按键,光线、声音、陀螺仪、红外发发射接收、电位器、温湿。还有RGB灯、OLED显示屏。集成了2路电机驱动、WIFI,引出了Arduino所有端口,还有两IIC接口,一个UART接口。一个7.4V供电口。 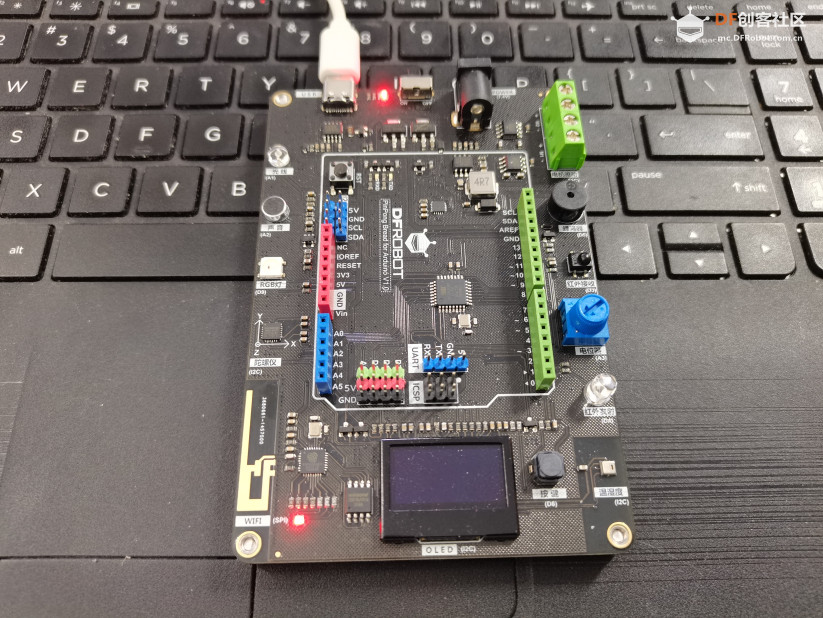 【编辑环境】 基于Python编程,提供PinPong使用教程及大量的example,方便学习使用Python驱动硬件。我使用了Mind+的Python模式。 需要把Mind+的pinpong库更新到“pinpong-0.3.5-20210328”。 【测试准备】 1、在Mind+的python模式中安装pgzero库Pygame Zero ,是一个基于 Pygame 的游戏编程框架,他可以更容易的编辑游戏,无需模板,不用编写事件循环,也无需学习复杂的 Pygame API。  2、测试代码pgzero游戏代码 先了解一下常见的项目结构。pgzero的使用过程中,往往直接引用某些对象名称,而不给出全部的路径,那是因为它默认执行的脚本**.py所在目录具有固定的结构,典型的案例如下: 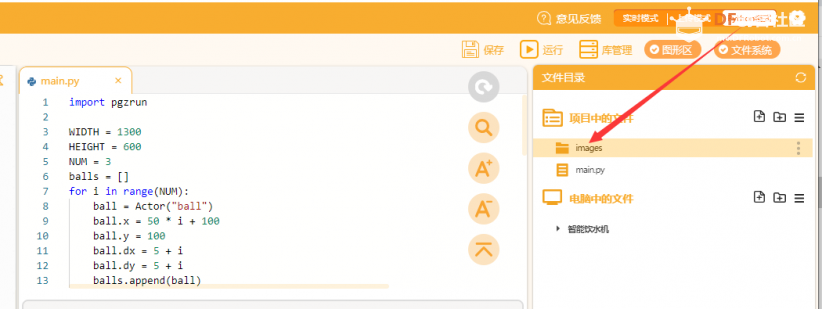 完整的游戏代码(测试用) 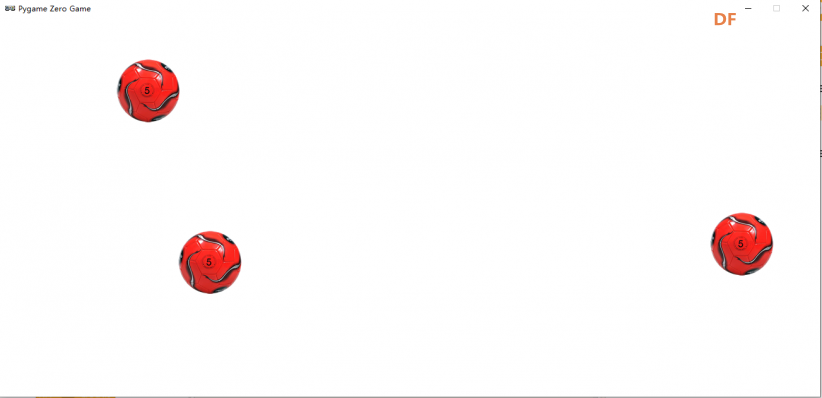 3、测试MPU6050代码 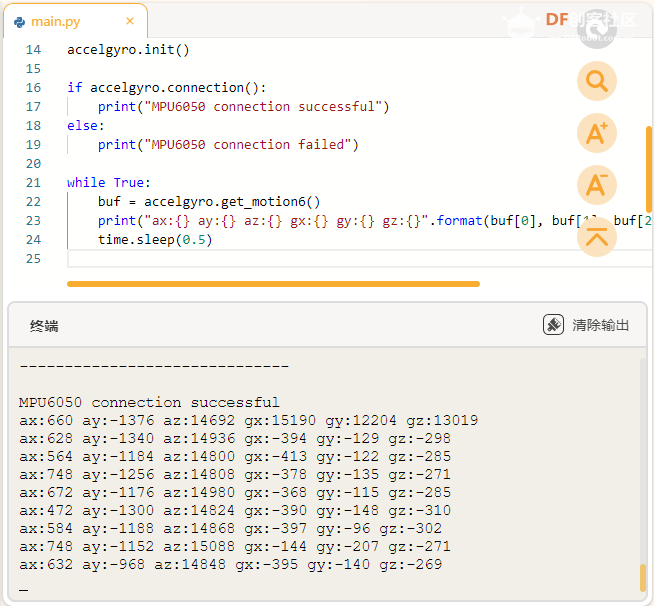 【完整代码】 其中,对于从MPU6050采集的数据进行一阶滤波。 【演示视频】 |
|
from pyphysicssandbox import * # -*- coding: utf-8 -*- #效果:打印检测到的加速度与角速度 #接线:使用windows电脑连接一块arduino主控板 import time from math import * from pinpong.board import Board from pinpong.libs.dfrobot_mpu6050 import MPU6050 K1 =0.05 # 对加速度计取值的权重 dt=20*0.001 #注意:dt的取值为滤波器采样时间 angle1=0.0 Board("PinPong Board").begin()#初始化,选择板型和端口号,不输入端口号则进行自动识别 accelgyro = MPU6050() accelgyro.init() if accelgyro.connection(): print("MPU6050 connection successful") else: print("MPU6050 connection failed") window("Python物理沙盒测试程序", 1024, 600) gravity(0.0, 500.0) # 设定重力参数 floor = static_rounded_box((0,570), 1024, 25, 3) # 最下面的地板,静止的 floor.color = Color('brown') floor.friction=1.0 #摩擦力 floor.elasticity=0.5 #弹性 box2 = static_rounded_box((974,320), 50, 250, 5 ) # 右下品红色的圆角正方形 box2.color = Color('magenta') box3 = static_rounded_box((0,320), 50, 250, 5 ) # 左下品红色的圆角正方形 box3.color = Color('magenta') wheel1 = ball((500, 130), 30) wheel1.color = Color('green') wheel1.draw_radius_line=True wheel1.friction = 0.25 #摩擦力 wheel1.elasticity=0.5 #弹性 wheel1.wrap = False wheel2 = ball((600, 130), 30) wheel2.color = Color('green') wheel2.draw_radius_line=True wheel2.friction = 0.25 #摩擦力 wheel2.elasticity=0.5 #弹性 wheel2.wrap = False chassis=box((470,0),160,100) chassis.color=Color("blue") wheel2.elasticity=0.0 #弹性 pin((500,130),wheel1,(470,0),chassis) pin((500,130),wheel1,(470,100),chassis) pin((600,130),wheel2,(630,0),chassis) pin((600,130),wheel2,(630,100),chassis) while True: buf = accelgyro.get_motion6() ax=buf[0] az=buf[2] gy=buf[4] angleAx=atan2(ax,az)*180/3.1415926 #加速度计算角度 gyroGy=-gy/131.00 #陀螺仪角速度,注意正负号与放置有关 #一阶互补滤波 angle1 = K1 * angleAx +(1-K1) * (angle1 +gyroGy * dt) #print("ax:{} ay:{} az:{} gx:{} gy:{} gz:{}".format(buf[0], buf[1], buf[2],buf[3],buf[4],buf[5])) print(angle1) motor(wheel1,angle1) motor(wheel2,angle1) time.sleep(20*0.001) run() print("测试完成") |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






