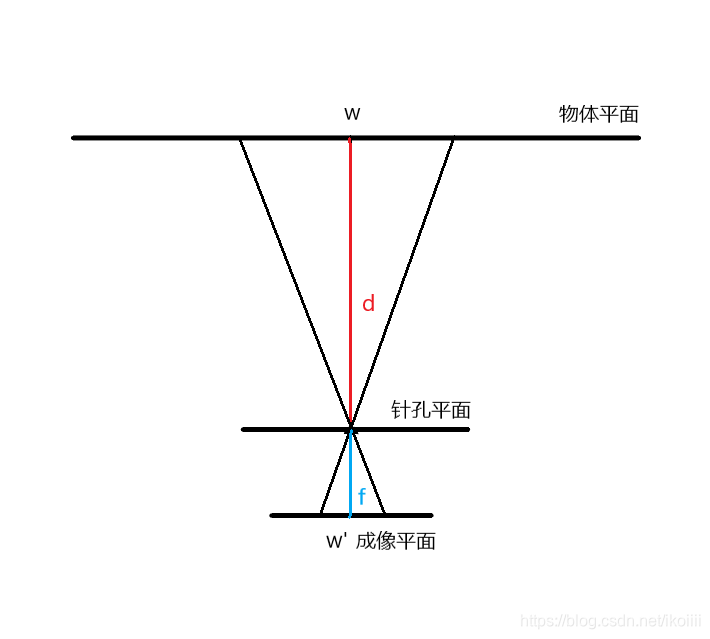
中间通过红蓝的垂线是相机的主光轴,d是被测物体至镜头的距离,f为相机镜头的焦距,w为被测物体的实际宽度(高度),w'为物体在成像平面(感光元件)上的宽度(高度)。
- import cv2
- import math
- import numpy as np
-
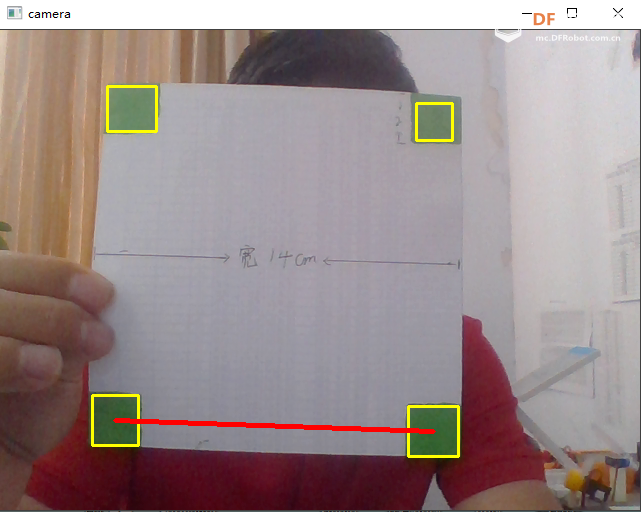
- ball_color = 'green'
- boxs=[]
- color_dist = {'red': {'Lower': np.array([0, 60, 60]), 'Upper': np.array([6, 255, 255])},
- 'blue': {'Lower': np.array([100, 80, 46]), 'Upper': np.array([124, 255, 255])},
- 'green': {'Lower': np.array([35, 43, 35]), 'Upper': np.array([90, 255, 255])},
- }
-
- cap = cv2.VideoCapture(0)
- cv2.namedWindow('camera', cv2.WINDOW_AUTOSIZE)
-
- while cap.isOpened():
- ret, frame = cap.read()
- if ret:
- if frame is not None:</p><p> #图像处理</p><p> gs_frame = cv2.GaussianBlur(frame, (5, 5), 0) # 高斯模糊
- hsv = cv2.cvtColor(gs_frame, cv2.COLOR_BGR2HSV) # 转化成HSV图像
- erode_hsv = cv2.erode(hsv, None, iterations=2) # 腐蚀 粗的变细,用于去除噪声点
- inRange_hsv = cv2.inRange(erode_hsv, color_dist[ball_color]['Lower'], color_dist[ball_color]['Upper']) #去除背景部分,将绿色以外的其他部分去除掉,并将图像转化为二值化图像</p><p> #绘制矩形边框
- cnts = cv2.findContours(inRange_hsv.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2] #使用该函数找出方框外边界,并存储在cnts中
- k=1
- if cnts:
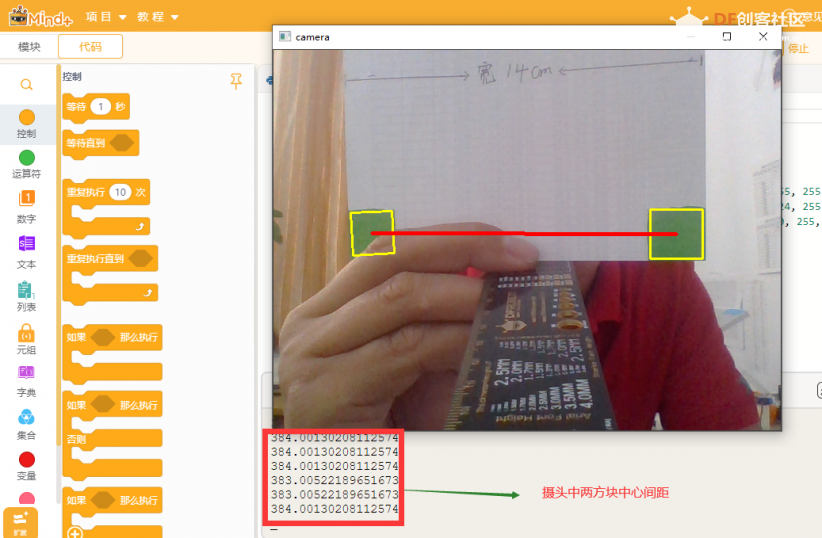
- #找到两个相邻的方块,并计算中心间距
- for i in cnts:
-
- rect = cv2.minAreaRect(i)
- box = cv2.boxPoints(rect)
- if k==1:
- boxs1=box
- if k==2:
- boxs2=box
- k=k+1
- cv2.drawContours(frame, [np.int0(box)], -1, (0, 255, 255), 2) #在原图像上将分析出的矩形边界绘制出来
-
- if k>2:
- x1=int((boxs1[0][0]+boxs1[1][0]+boxs1[2][0]+boxs1[3][0])/4)
- y1=int((boxs1[0][1]+boxs1[1][1]+boxs1[2][1]+boxs1[3][1])/4)
- x2=int((boxs2[0][0]+boxs2[1][0]+boxs2[2][0]+boxs2[3][0])/4)
- y2=int((boxs2[0][1]+boxs2[1][1]+boxs2[2][1]+boxs2[3][1])/4)
-
- cv2.line(frame,(x1,y1),(x2,y2), (0, 0, 255), 4,8) #在原图像上将找到的相邻方块的中心点连线
- lenght=math.sqrt((x1-x2)**2+(y1-y2)**2)
- print(lenght)
- cv2.imshow('camera', frame)
- cv2.waitKey(1)
- else:
- print("无画面")
- else:
- print("无法读取摄像头!")
-
- cap.release()
- cv2.waitKey(0)
- cv2.destroyAllWindows()
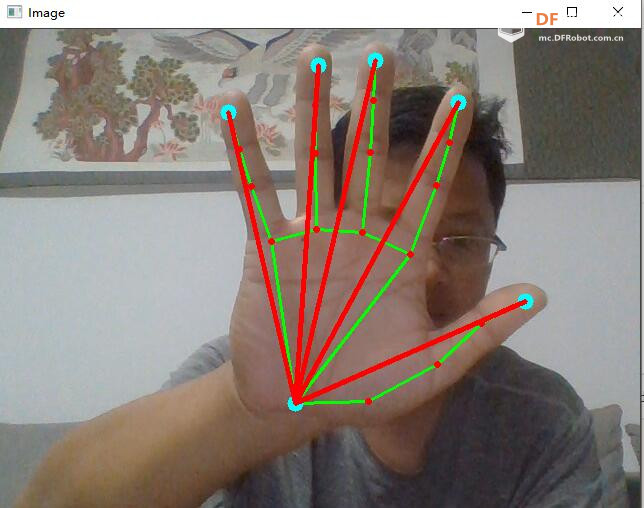
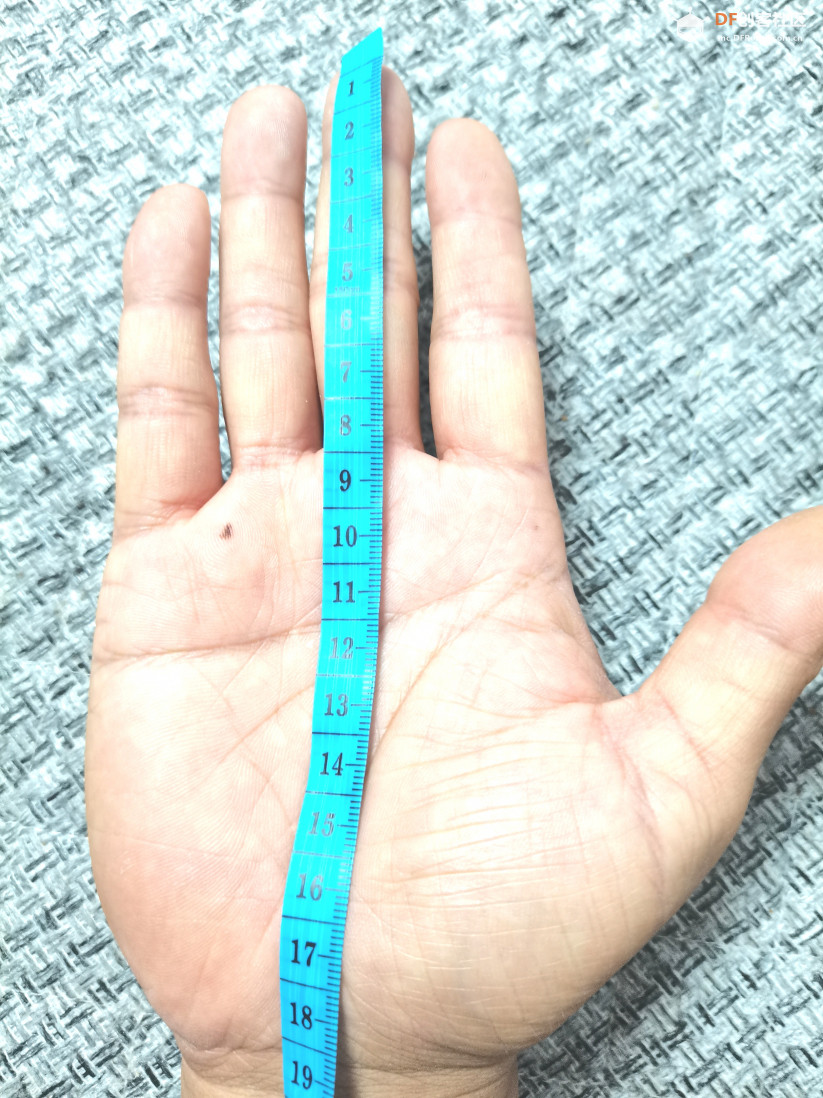
【手距控灯】
测量实际中指到腕关节的距离,估测为18cm
-
- import cv2
- import math
- from handutil import HandDetector
- import numpy as np
- import time
- from pinpong.board import Board,Pin,NeoPixel #导入neopixel类
- Board("uno").begin() #初始化,选择板型(uno、leonardo、xugu)和端口号,不输入端口号则进行自动识别
- NEOPIXEL_PIN = Pin(Pin.D7)
- PIXELS_NUM = 7 #灯数
- np = NeoPixel(NEOPIXEL_PIN,PIXELS_NUM)
- # 打开摄像头
- cap = cv2.VideoCapture(0)
- # 创建一个手势识别对象
- detector = HandDetector()
-
- # 指尖列表,分别代表腕关节,大拇指、食指、中指、无名指和小指的指尖
- tip_ids = [0,4, 8, 12, 16, 20]
- lenght=0
- num=0
- while True:
- success, img = cap.read()
-
- if success:
- # 检测手势
- img = detector.find_hands(img, draw=True)
- # 获取手势数据
- lmslist = detector.find_positions(img)
- if len(lmslist) > 0:
- fingersX = []
- fingersY = []
- for tid in tip_ids:
- # 找到每个指尖的位置
- x, y = lmslist[tid][1], lmslist[tid][2]
- cv2.circle(img, (x, y), 8, (255, 255, 0), cv2.FILLED)
-
- if tid == 0:
- fingersX.append(x)
- fingersY.append(y)
-
- if tid == 4:
- fingersX.append(x)
- fingersY.append(y)
-
- if tid == 8:
- fingersX.append(x)
- fingersY.append(y)
-
- if tid == 12:
- fingersX.append(x)
- fingersY.append(y)
-
- if tid == 16:
- fingersX.append(x)
- fingersY.append(y)
-
- if tid == 20:
- fingersX.append(x)
- fingersY.append(y)
- #计算图像中指到腕关节的距离,并求和
-
- lenght=math.sqrt((fingersX[0]-fingersX[3])**2+(fingersY[0]-fingersY[3])**2)
- #18为实际中指到腕关节的距离
- lenght=640/lenght*18
- for num in range(0,int(lenght/80*7)):
- # 找到对应的手势图片并显示
- if num>6:
- num=6
- np[num] = (255, 0 ,0)
- if num<6:
- for k in range(num,7):
- np[k] = (0, 0 ,0)
- for i in range(1,6):
- cv2.line(img, (fingersX[0], fingersY[0]), (fingersX[i], fingersY[i]), (0, 0, 255), 4,8)
- print(lenght)
-
- cv2.imshow('Image', img)
-
- k = cv2.waitKey(1)
- if k == ord('q'):
- break
-
- cap.release()
- cv2.destroyAllWindows()



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






