|
|
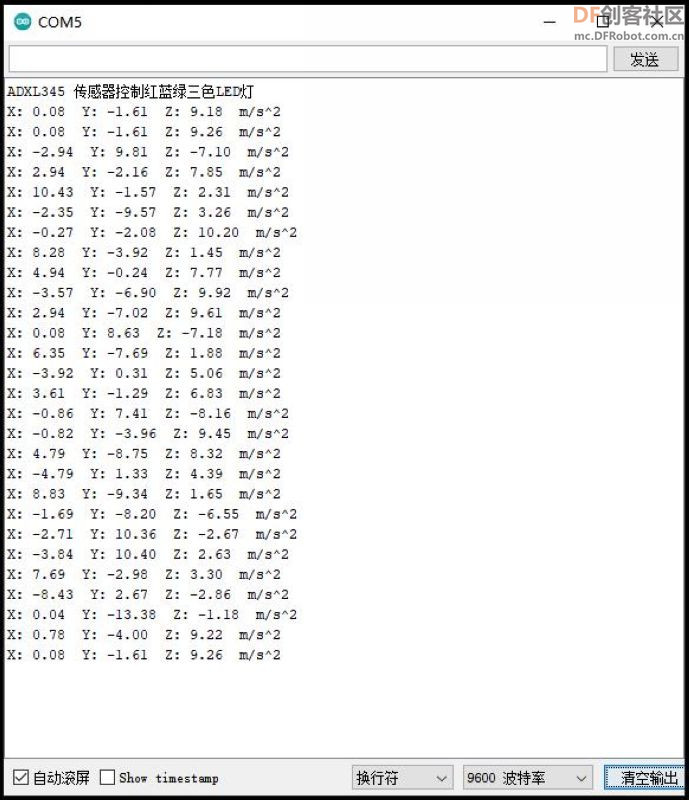
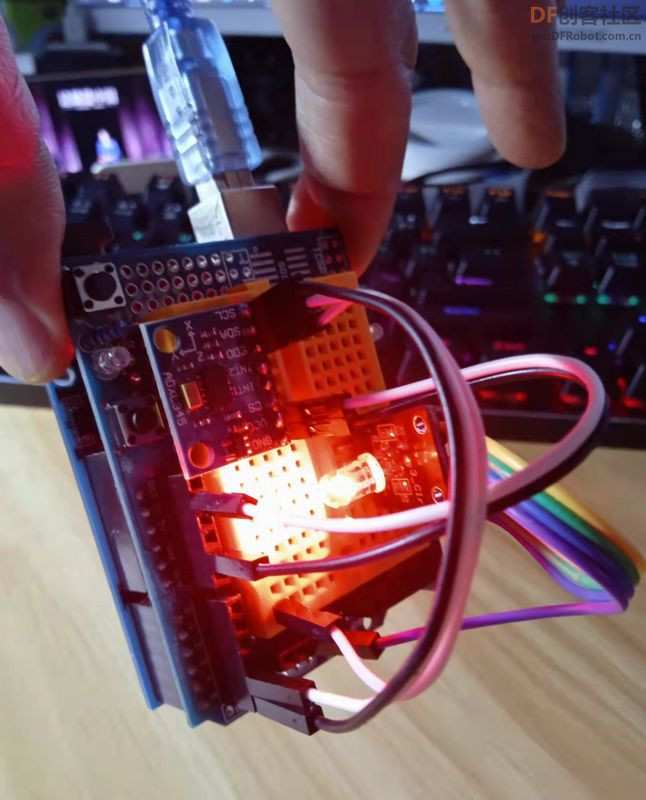
[项目] 【Arduino】168种传感器模块系列实验(48)---三轴ADXL345模块 |
|
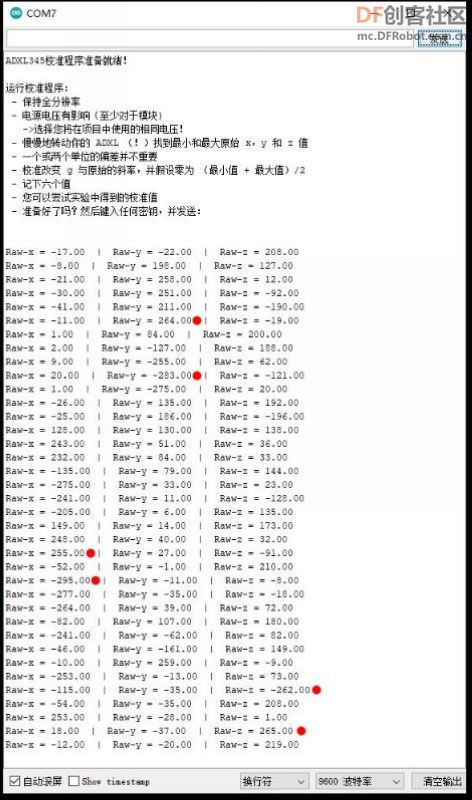
(2)Arduino参考开源代码 |
|
(2)Arduino参考开源代码 |
|
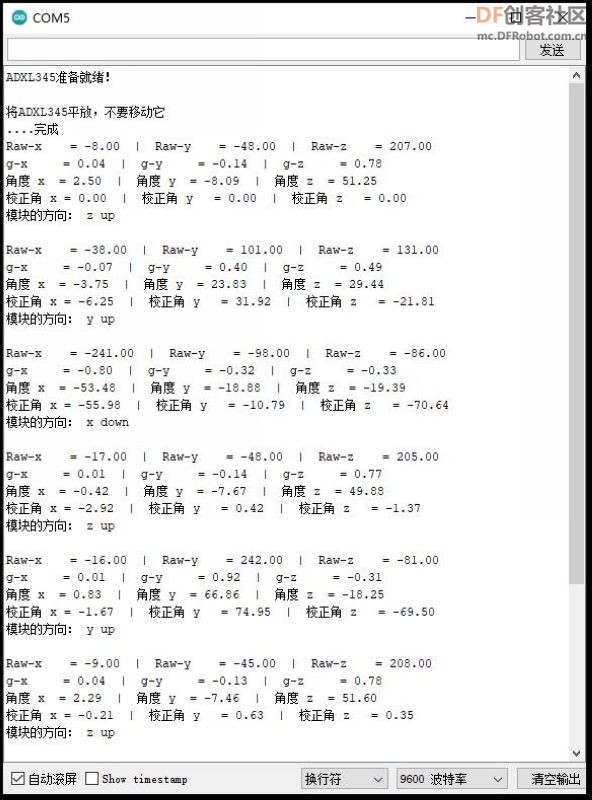
程序十三:通过输入程序十二中获得的值来应用校准(导入实测的修正值) (1)Arduino参考开源代码 |
|
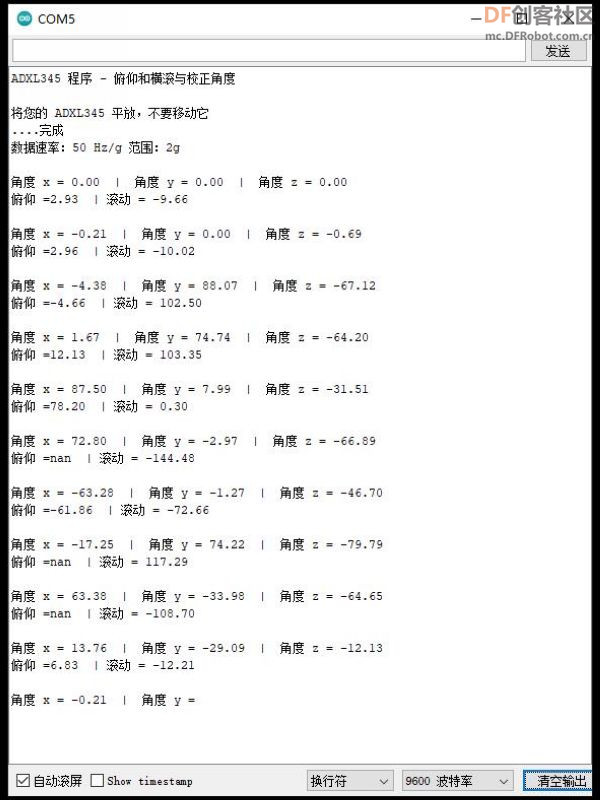
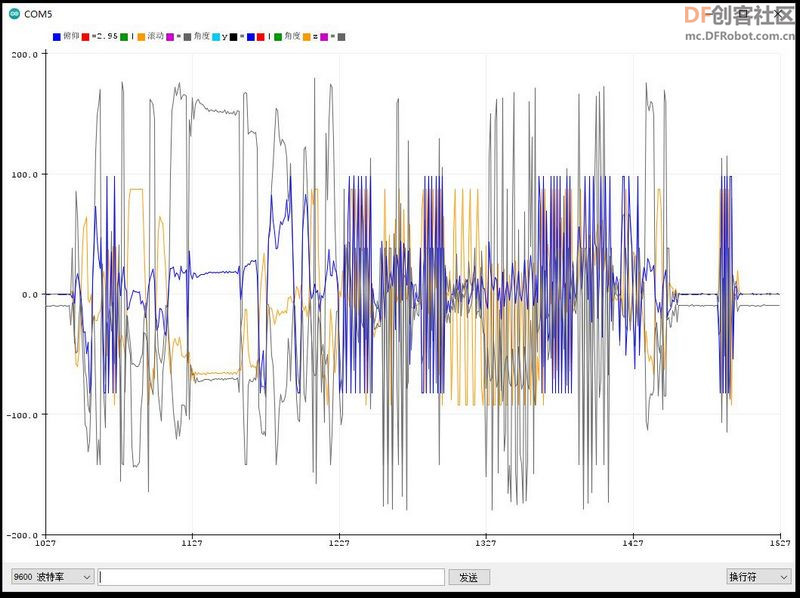
程序十四:测量 ADXL345 的俯仰角和滚动角与校正角度法的对比 (1)Arduino参考开源代码 |
|
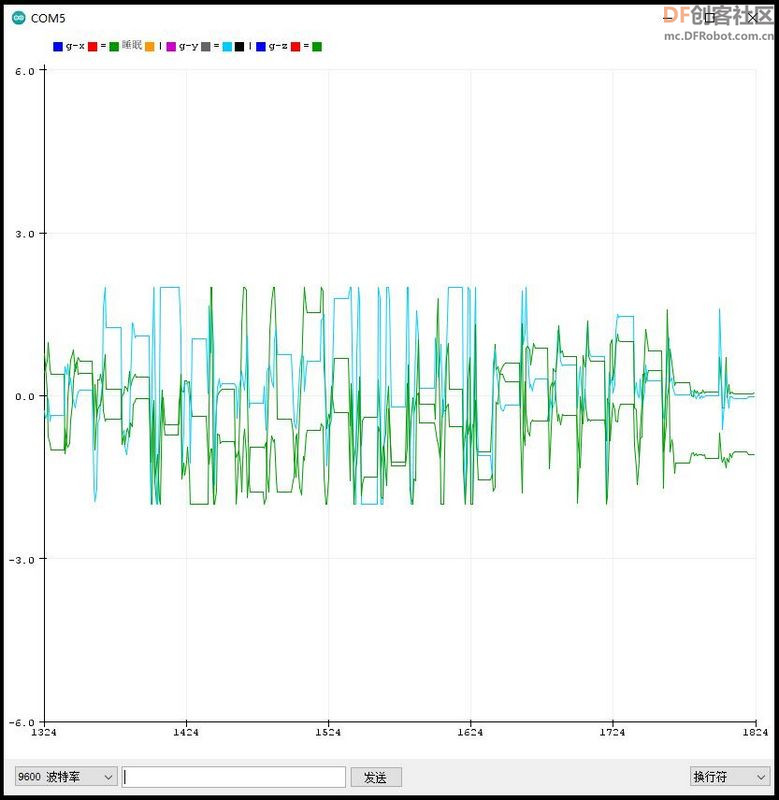
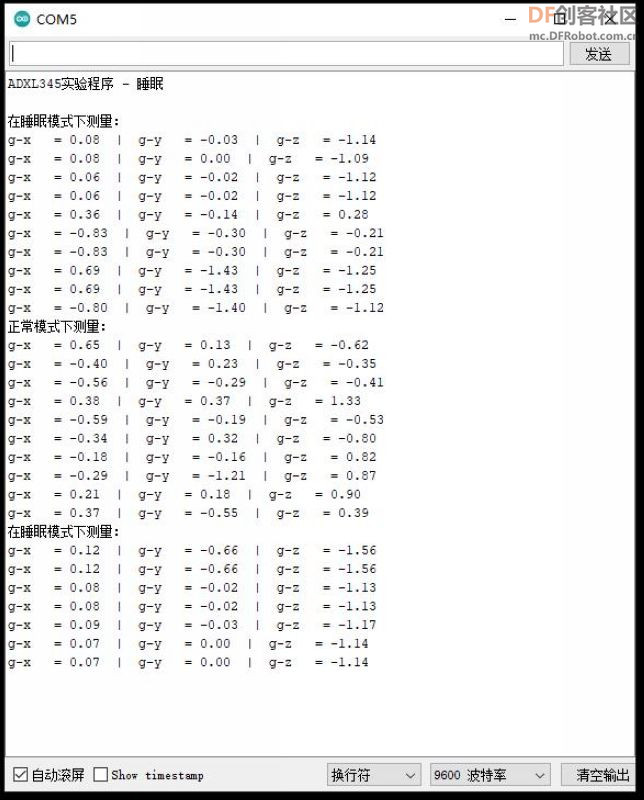
程序十五:将ADXL345置于休眠状态,并唤醒它 (1)Arduino参考开源代码 |
|
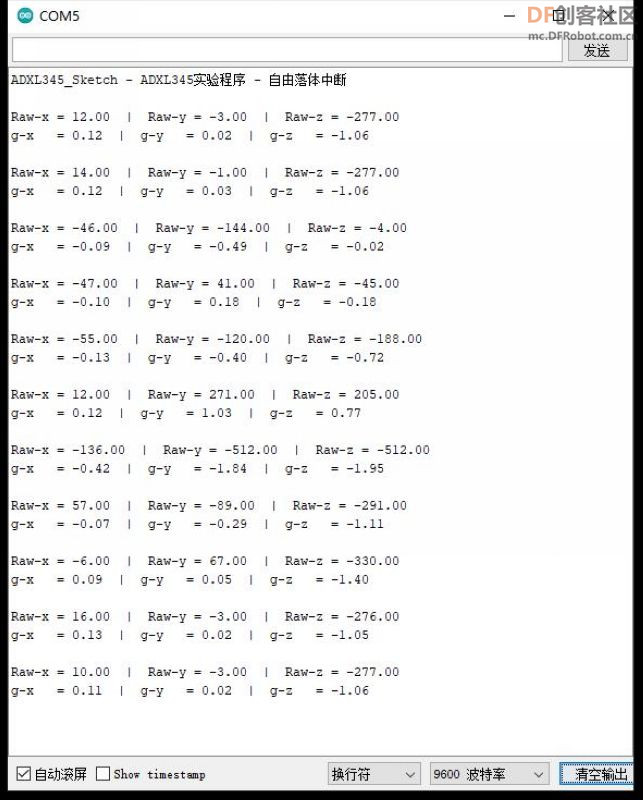
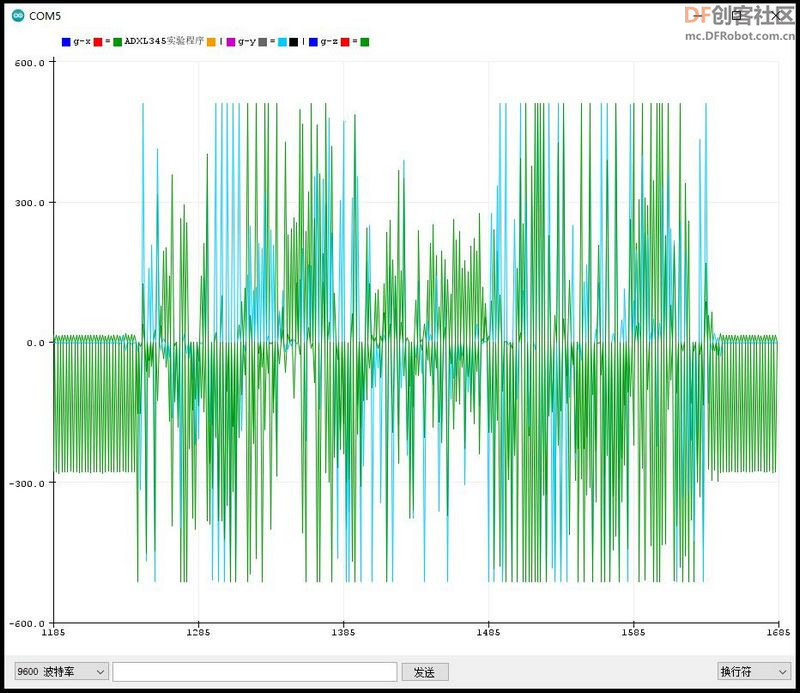
16、程序十六:ADXL345自由落体中断(激活并分配给 INT2) (1)ADXL345的中断特性 有关中断功能的一般信息 ADXL345区分了八个中断: (a)溢出:当未读数据被覆盖时触发,即当数据速率大于数据检索的频率时。 水印:如果FIFO缓冲器中的测量值数量与FIFO控制寄存器中定义的值相对应(稍后会更清晰)。 (b)自由落体:当所有轴上的加速度值在一段时间内低于某个值时,就会触发该值。 (c)不活动:在指定时间内超过指定轴上的加速度限制时。 (d)活动:当指定轴上的加速度超过极限时。 (e)单点:超过特定限制的最大持续时间的加速度。 (f)双击:两个峰值,两者都满足单点条件,并且它们之间也有一定的时间间隔。 (g)数据就绪:存在未读数据。 (h)使用函数:激活中断。第一个参数是中断类型,第二个参数是确定中断输出的引脚。setInterrupt(type, pin1/pin2) 请务必注意,“溢出”、“水印”和“数据就绪”的中断始终处于启用状态。因此,您无法禁用它们,只需更改输出引脚即可。默认值为 INT1。您必须先激活所有其他中断。您可以使用 停用它们。deleteInterrupt(type) 在中断寄存器中,在中断的情况下,存储中断类型。读取此寄存器将删除中断,以便可以触发新的中断。其函数为 。它将中断类型作为字节返回。如何“翻译”这可以在库文件ADXL345_WE.h中找到。或者,您可以检查特定类型。readAndClearInterrupts()checkInterrupt(source, type) 还有另一个通用功能,即.这将设置中断引脚是低电平有效还是高电平有效(默认)。setInterruptPolarity(polarity) |
|
(2)Arduino参考开源代码 |
|
程序十七:数据就绪中断在 Arduino 引脚 2 上触发中断(分配给 INT2) (1)Arduino参考开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






