|
6103| 9
|
[项目] 【花雕动手做】组装测试SG90二自由度9克舵机云台 |
|
本帖最后由 驴友花雕 于 2023-7-26 19:21 编辑 37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验一百七十三:SG90二自由度舵机云台塑料支架MG双轴机械手臂航模监控智能机器人 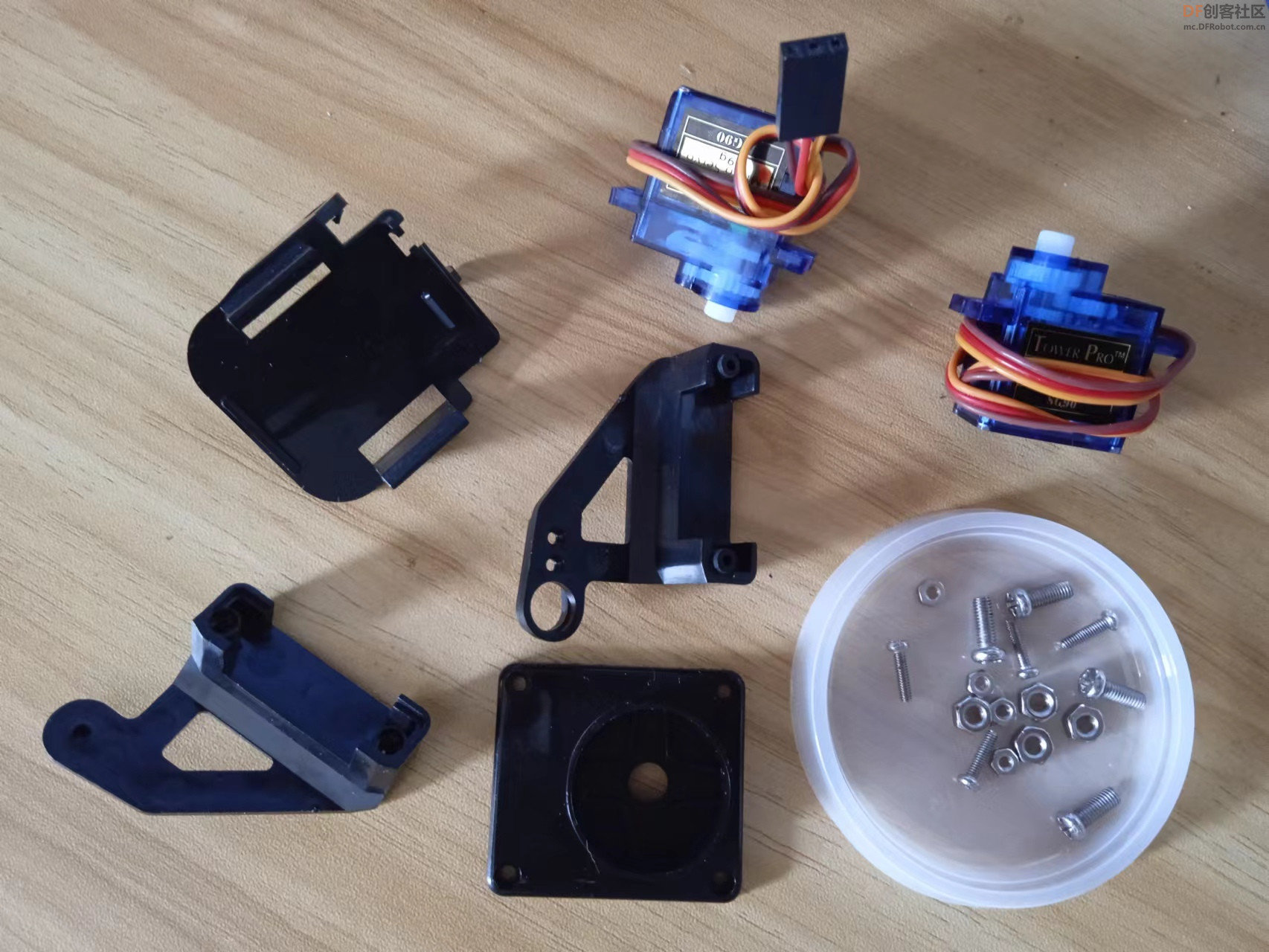 云台参数说明: 该模块包含两个SG90 9g舵机+1个FPV尼龙云台 上下转动180度,左右转动180度 总高度:7.2cm 模块自重:约35g 底座长*宽:37mm*33mm 架台(载物台)长*宽:28mm*28mm 安装孔径尺寸:32mm*27mm 舵机线长度:19-24cm 工作电压:4.8-6V 工作温度:0℃-55℃ 引脚定义:橙线信号,红线正极,棕线负极 舵机参数说明: 产品扭矩:2.0kg/cm(4.8V),2.2kg/cm(6V) 产品速度:0.09s/60°(4.8V),0.08s/60°(6V) 齿轮形式:塑料齿轮 死区设定:7微秒 舵机参考资料: 【雕爷学编程】Arduino动手做(83)---模拟SG90舵机模块 https://blog.csdn.net/weixin_41659040/article/details/131758166 1、将舵机十字舵盘安装到底座上  2、把上下舵机装到上下机构上面  3、将舵机安装到水平旋转机构之上 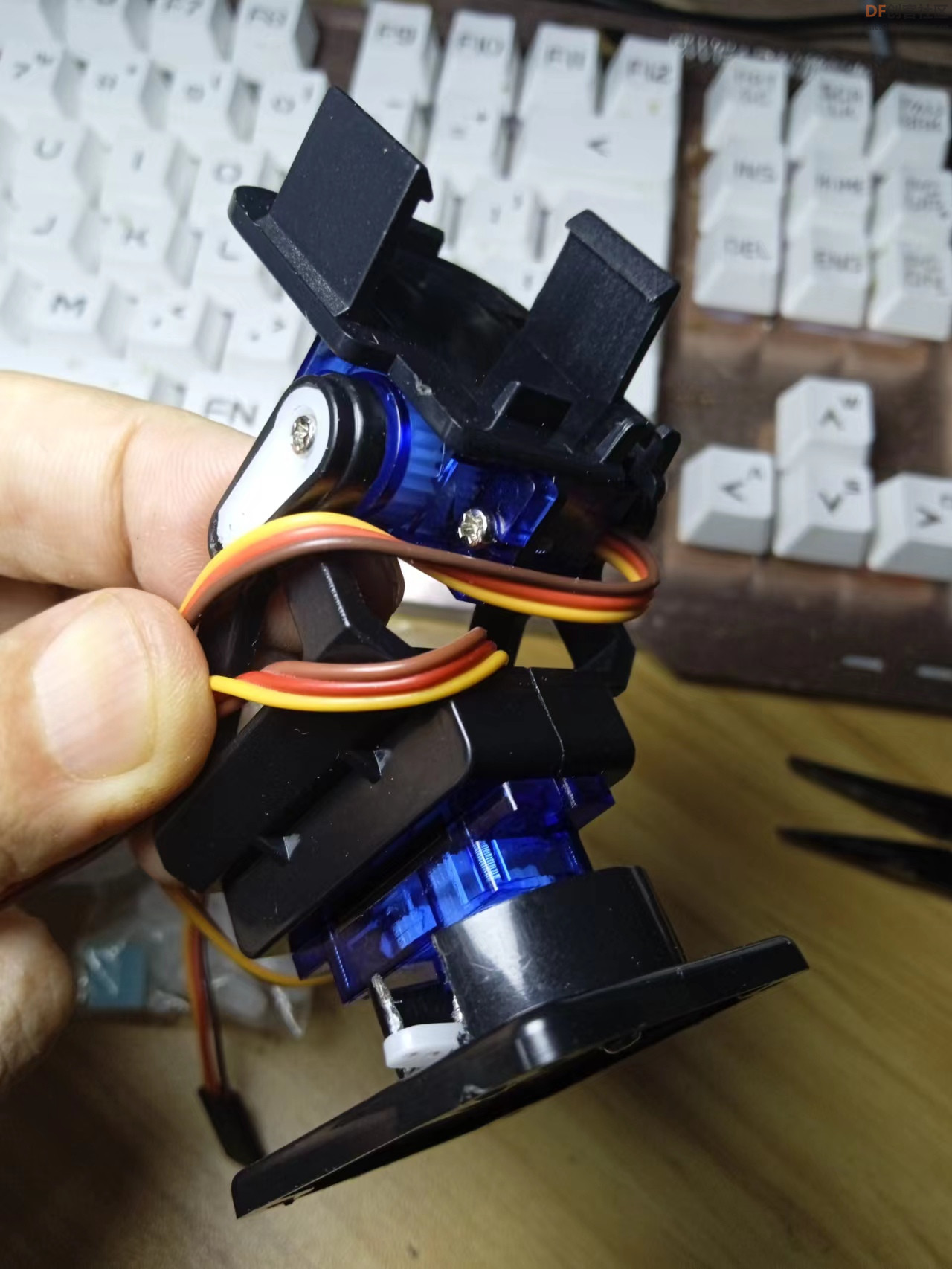 4、组合上下与水平机构,固定好单臂舵盘  5、水平舵机连接到底座上,固定好十字舵盘  6、用四颗小螺丝将云台固定到实验底板上面 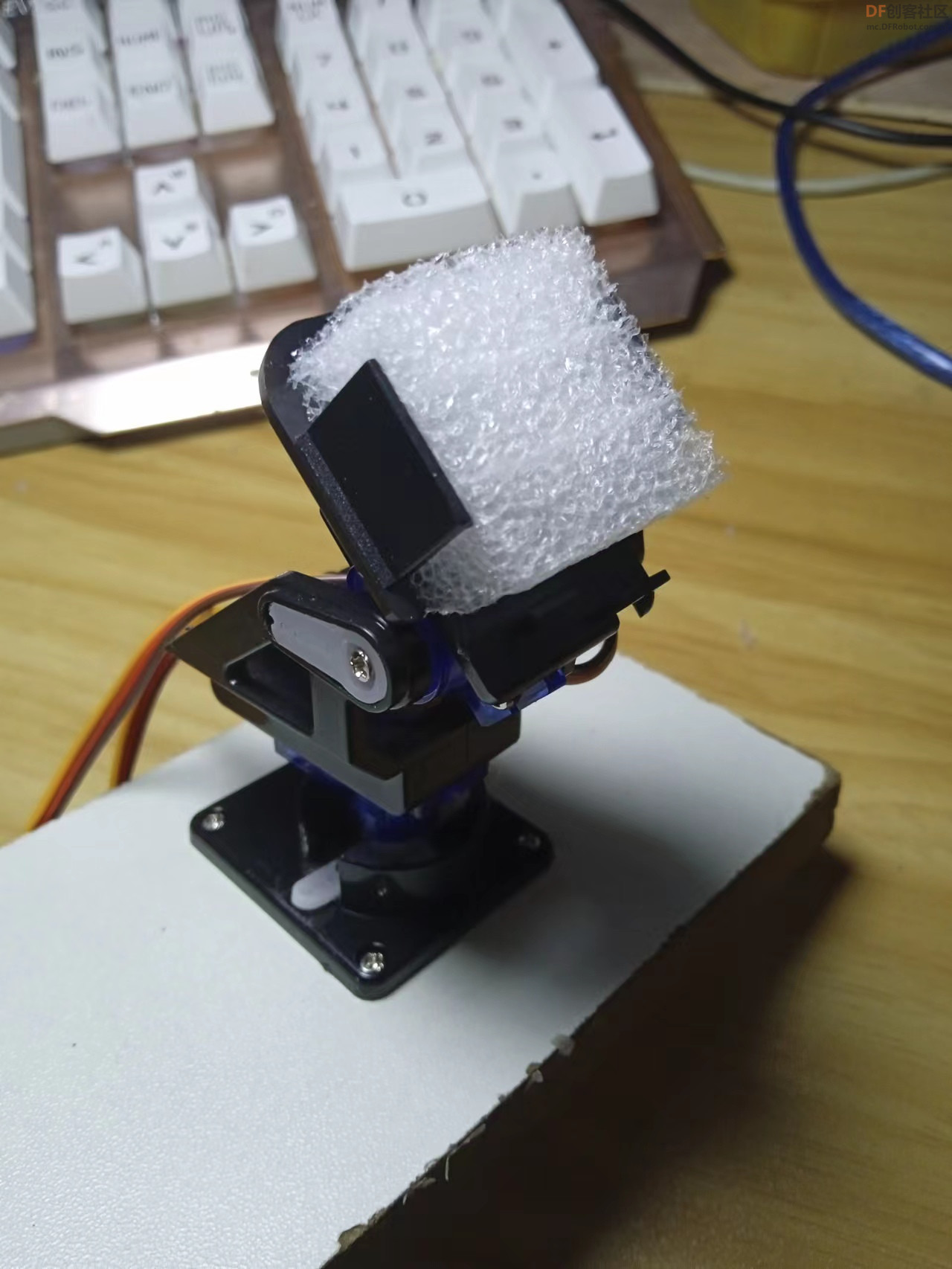 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验一百七十三:SG90二自由度舵机云台塑料支架MG双轴机械手臂航模监控智能机器人 项目:测试驱动二轴云台 Arduino实验场景图 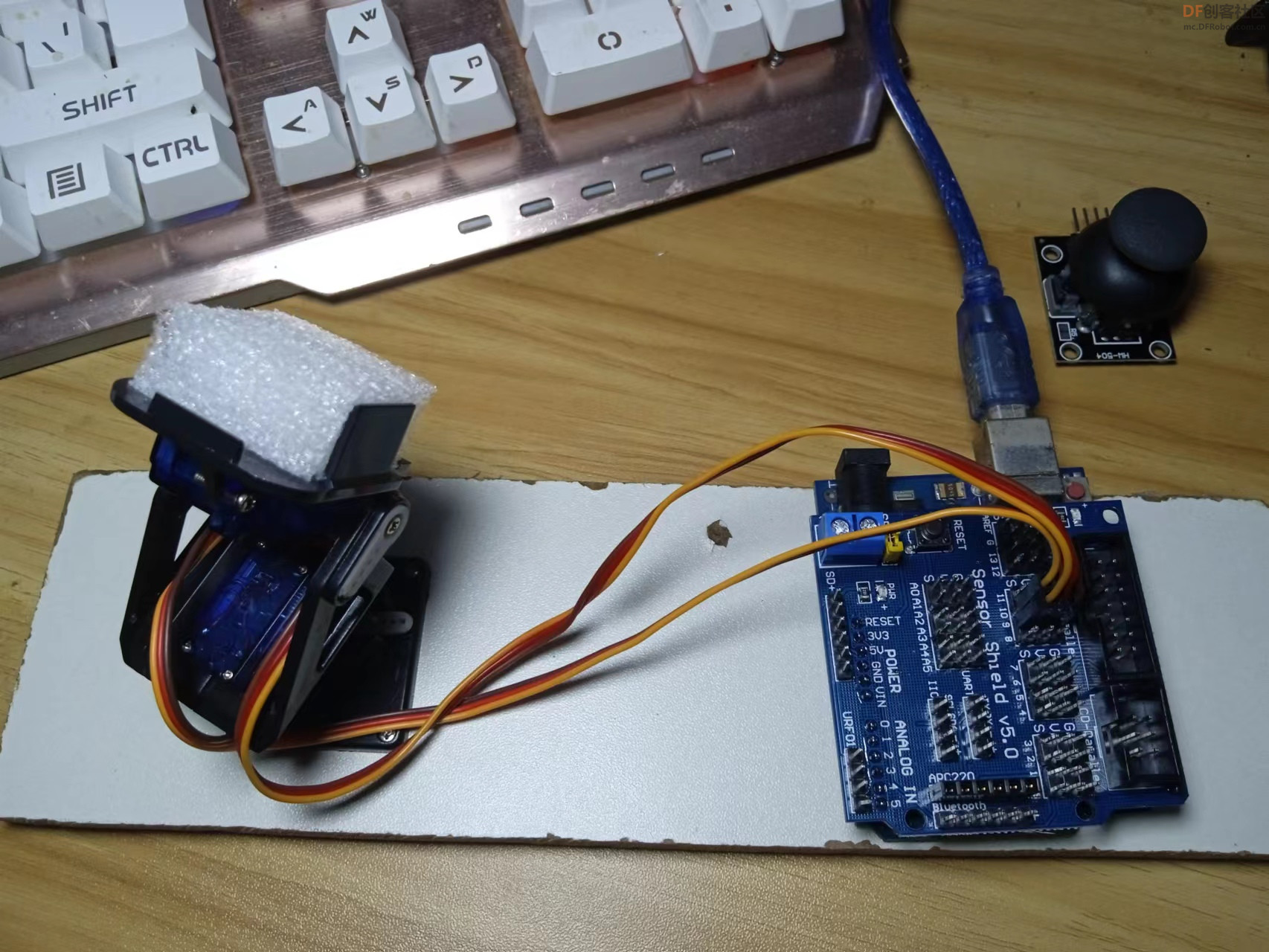  |
|
本帖最后由 驴友花雕 于 2023-7-26 19:17 编辑 【雕爷学编程】Arduino动手做(83)---模拟SG90舵机模块 https://blog.csdn.net/weixin_41659040/article/details/116923671 【雕爷学编程】Arduino动手做(83)---模拟SG90舵机模块2 https://blog.csdn.net/weixin_41659040/article/details/131758166 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






