|
3673| 0
|
[项目] 【花雕动手做】ASRPRO语音识别(65)---语音TT电机PWM转速 |
|
本帖最后由 驴友花雕 于 2024-2-10 17:26 编辑 本例实验采用TT电机  本例实验采用MX1508双路马达驱动模块 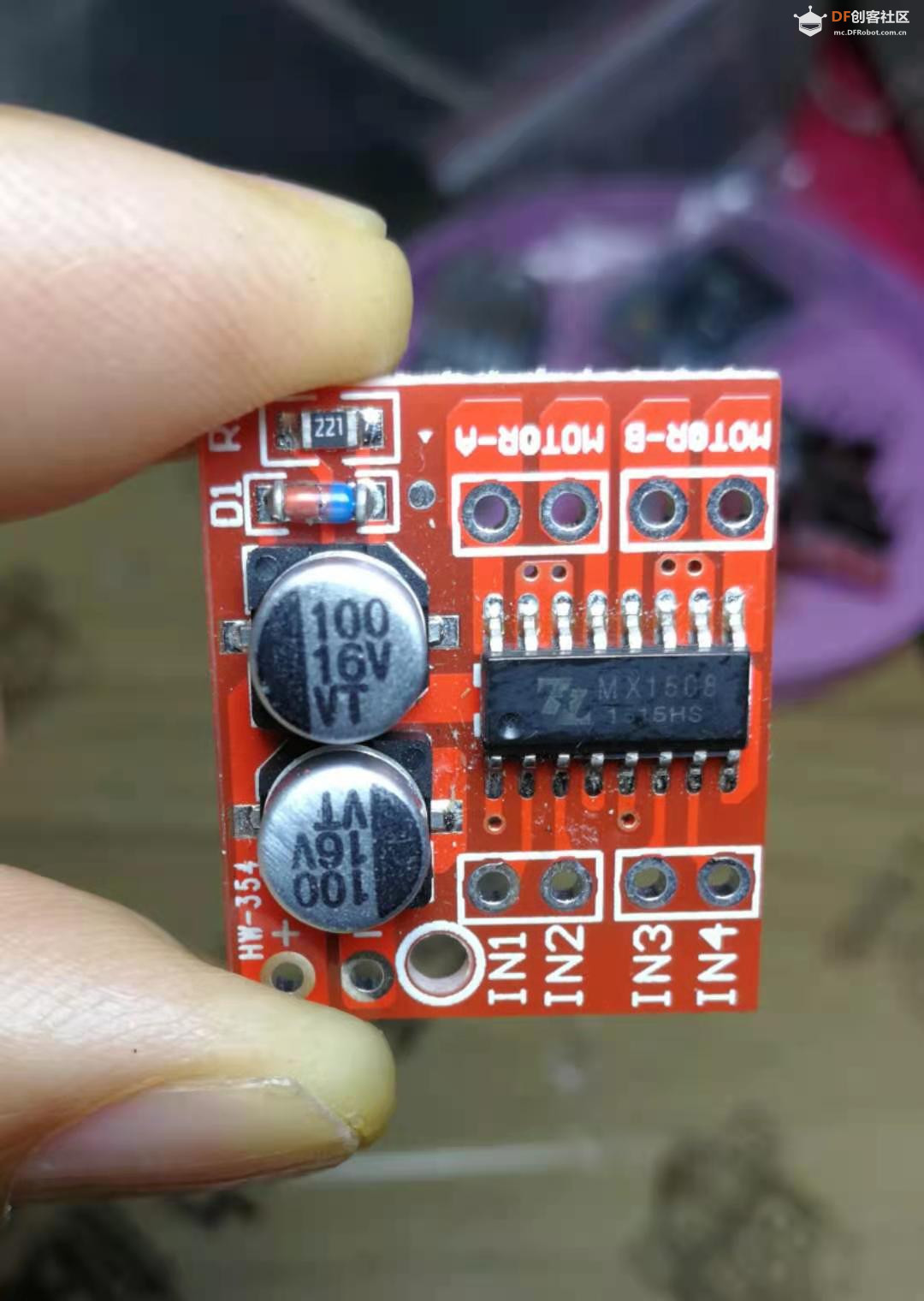 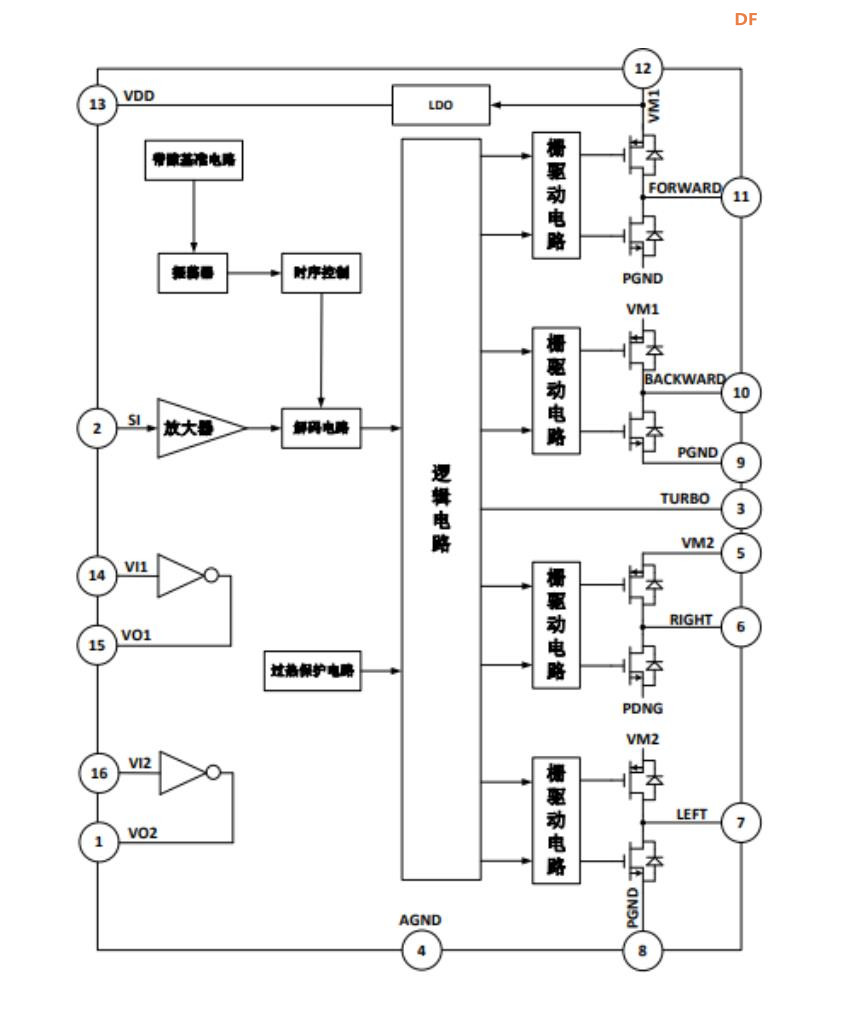 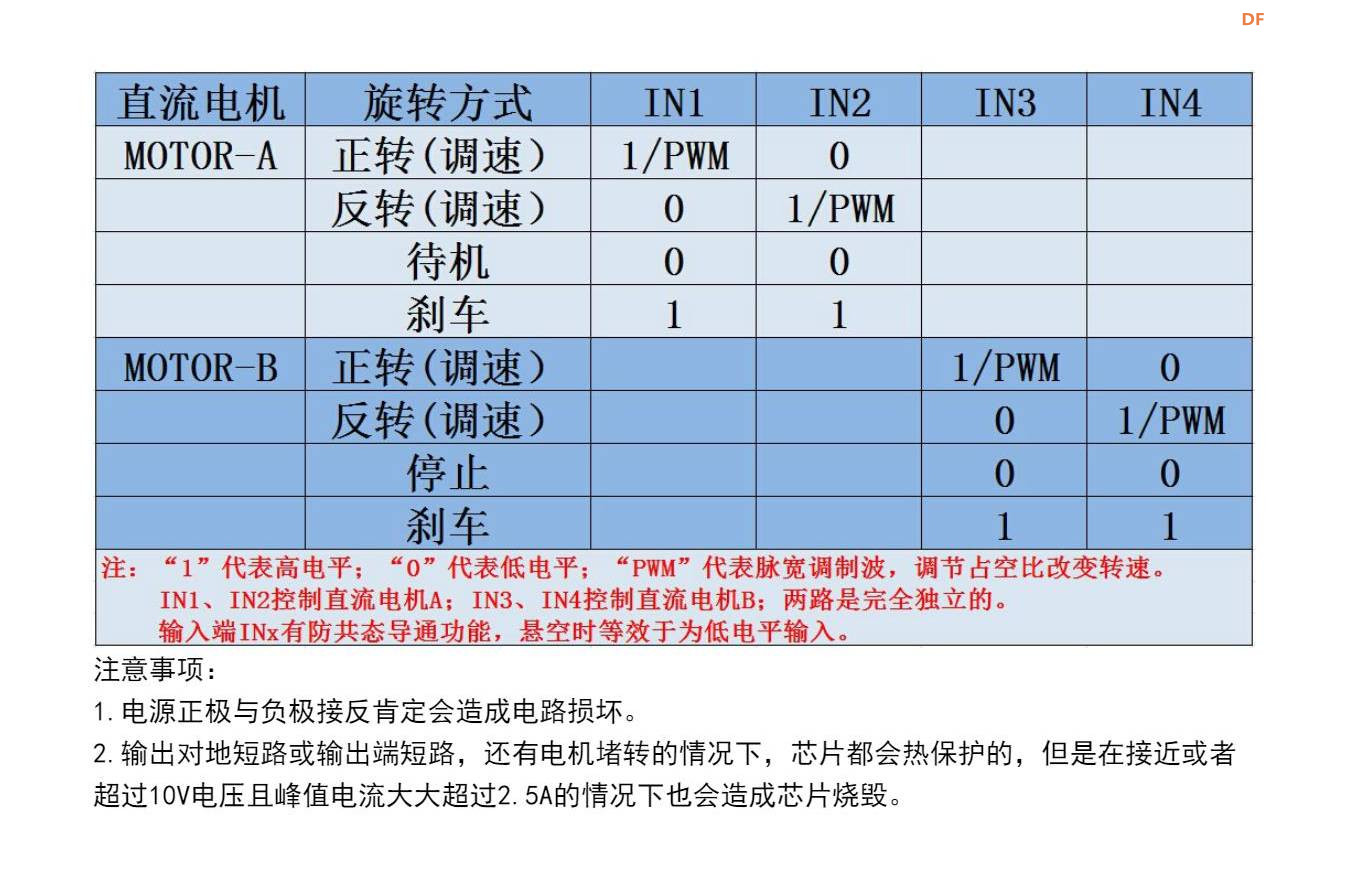  MX1508双路马达驱动模块主要参数 双路H桥电机驱动,可以同时驱动两路直流电机或者1个4线两相式步进电机; 模块供电电压2V-10V; 信号端输入电压1.8-7V; 单路工作电流1.5A,峰值电流可达2.5A,低待机电流 (小于 0.1uA); 内置防共态导通电路,输入端悬空时,电机不会误动作; 内置带迟滞效应的过热保护电路 (TSD),无需担心电机堵转; 产品尺寸: 24.7215mm (长宽高),超小体积,适合组装和车载; 安装孔直径:2 mm; 重量:5g 。  PWM控制电机原理 是一种利用微处理器的数字输出来对模拟电路进行控制的技术,通过调节脉冲宽度来控制输出电压或电流,从而实现对电机转速或转向的控制。PWM的频率是指在一秒钟内,信号从高电平到低电平再回到高电平的次数,占空比是指一个脉冲周期内,高电平的时间与整个周期时间的比例。占空比越大,所得到的平均电压也就越大,电机转速就高;占空比越小,所得到的平均电压也就越小,电机转速就低。PWM可以通过H桥电路来实现电机的正反转调速,H桥电路由四个功率电子开关构成,通过控制对角的两个电子开关导通,另外两个截止,可以改变电机两端的电源极性,从而改变电机的转向。PWM还可以通过不同的占空比来控制舵机的转角,舵机的频率一般为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围,来控制舵机不同的转角。 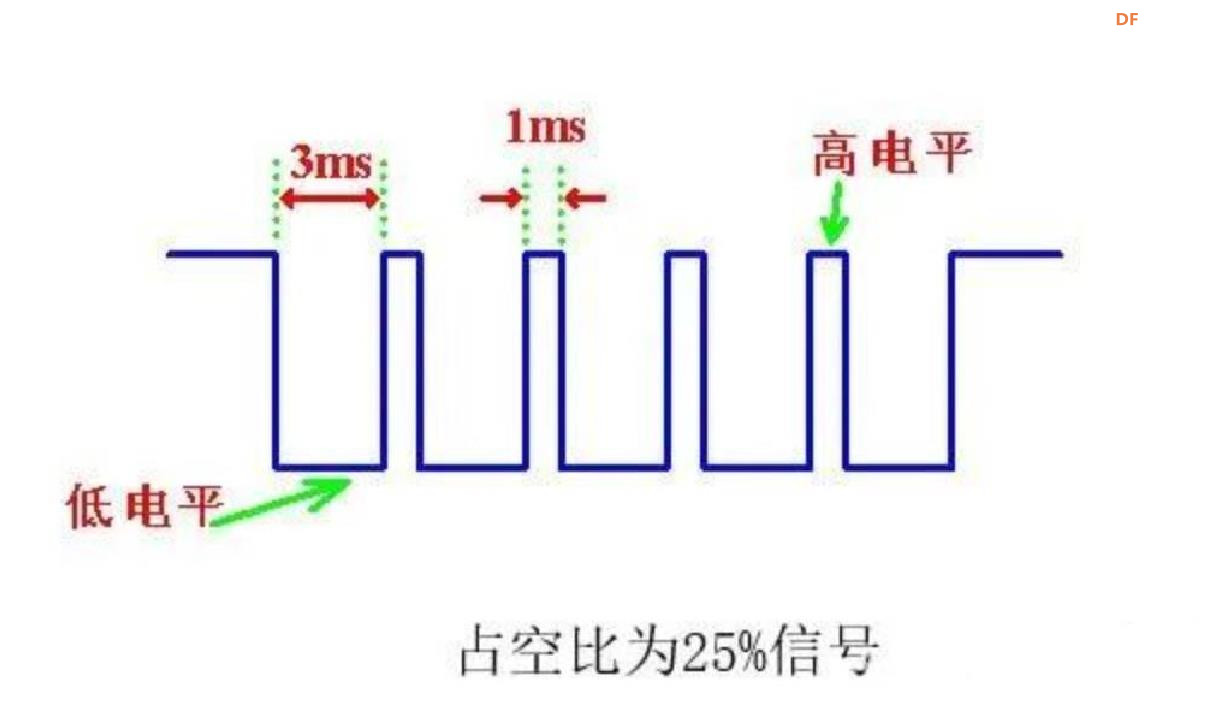 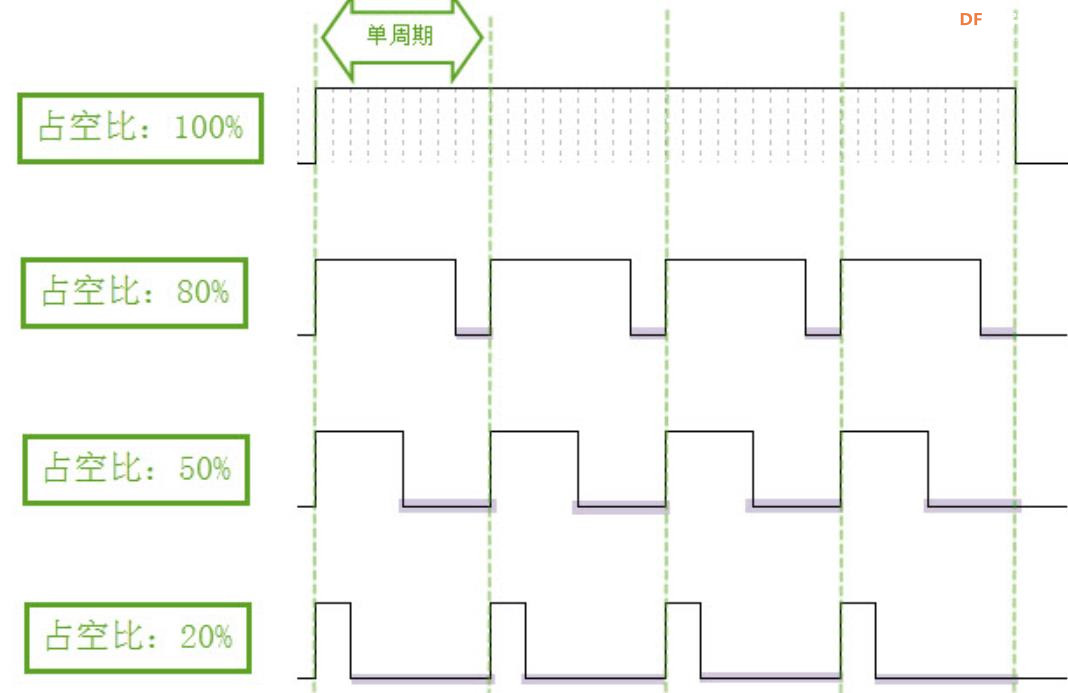 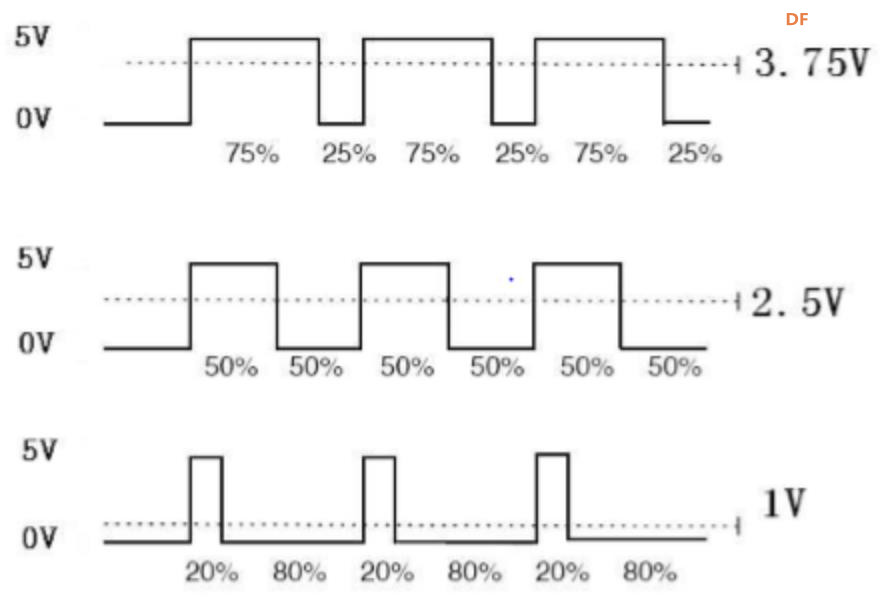 【花雕动手做】实验七十:使用语音PWM控制TT电机的三种转速 实验开源代码 生成模型与编译烧录 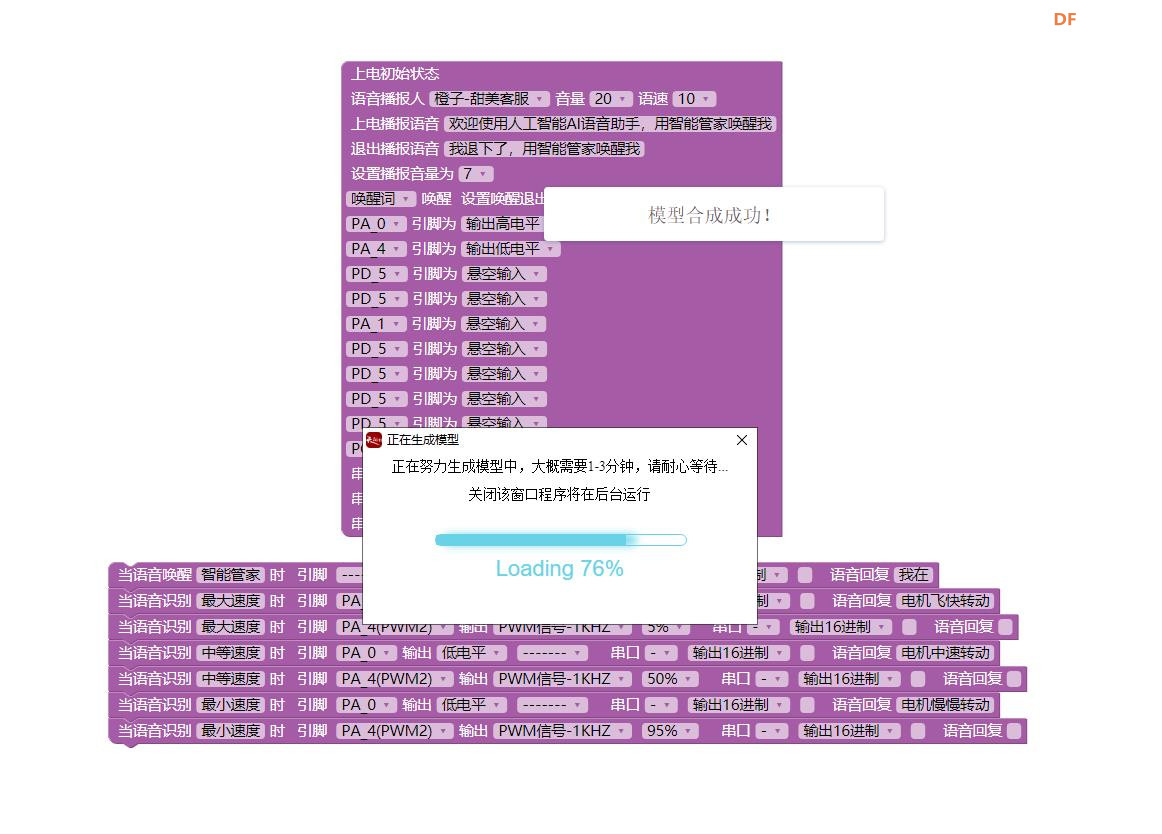 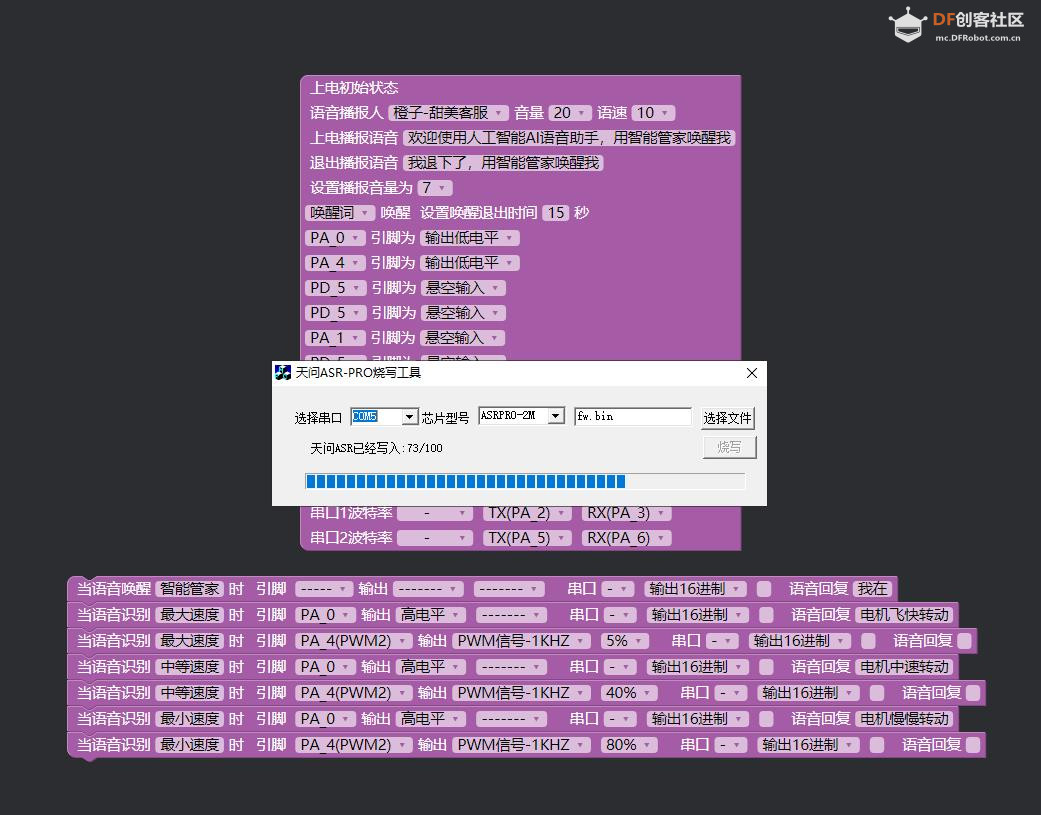 实验记录视频 【【花雕动手做】ASRPRO语音识别(65)---语音TT电机PWM转速】 https://www.bilibili.com/video/BV1tp421R7qx/?share_source=copy_web&vd_source=371a292a55e5ca9be994cbb4a86cc987 实验场景图 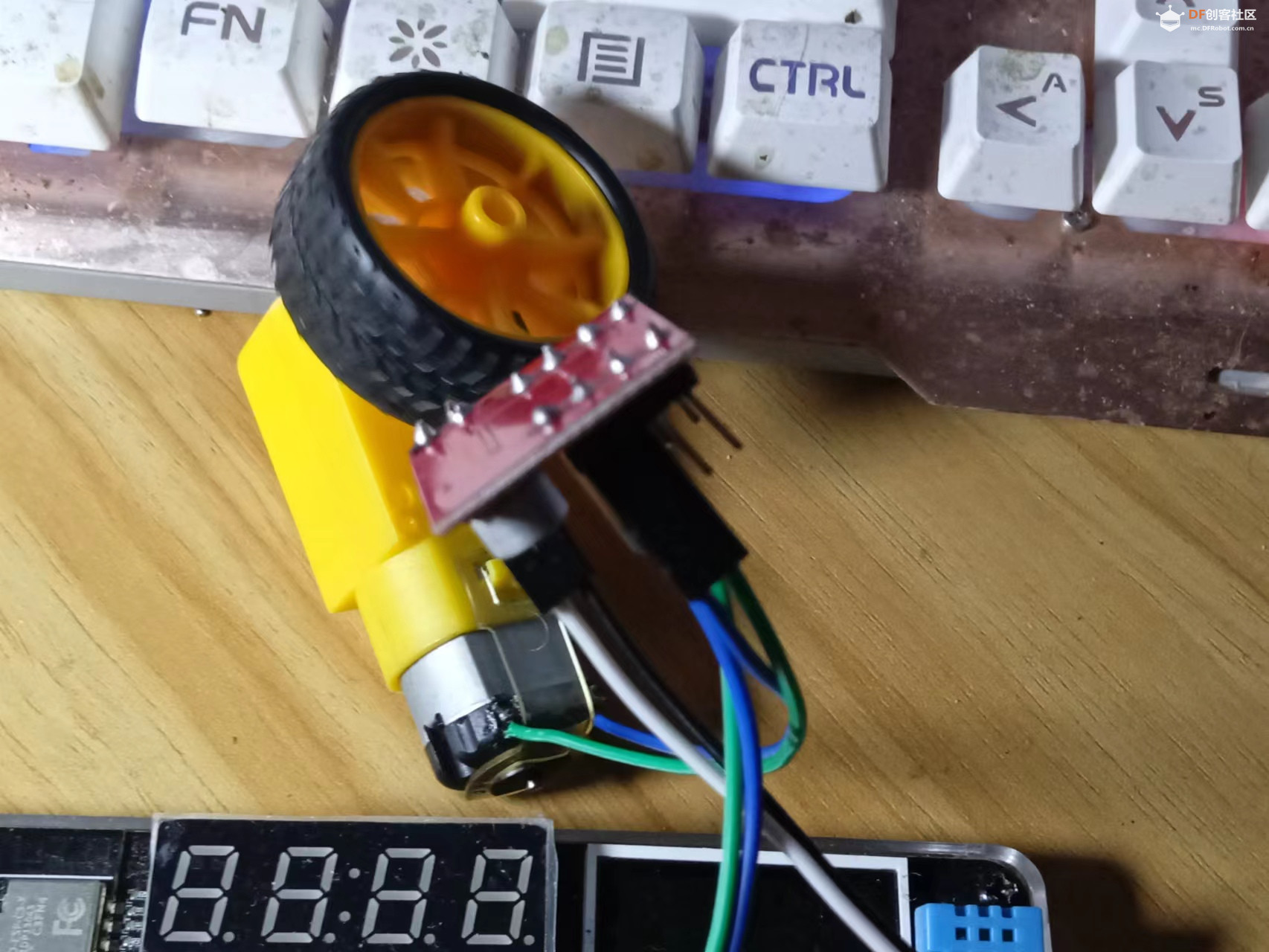  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






