|
|
[项目] 【花雕学编程】Arduino动手做(225)---AS5600的16个小实验 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之九:使用SimpleFOC库中的低通滤波器,通过串口绘图监视器 查看手动电机轴形成的数据波形 实验开源代码 |
|
要点解读I2C初始化:使用Wire.begin()初始化I2C总线。数据请求:使用Wire.requestFrom()直接向从机发送数据请求信号。数据读取:使用Wire.read()获取传感器数据。数据处理:将读取的MSB和LSB数据组合成一个16位的值,并通过低通滤波器进行处理。串口输出:将处理后的数据通过串口输出,便于在串口绘图监视器中查看。 使用串口绘图监视器打开Arduino IDE。选择工具菜单中的“串口监视器”。在串口监视器窗口中,选择右下角的“绘图”模式。你将看到传感器数据的实时图形显示。 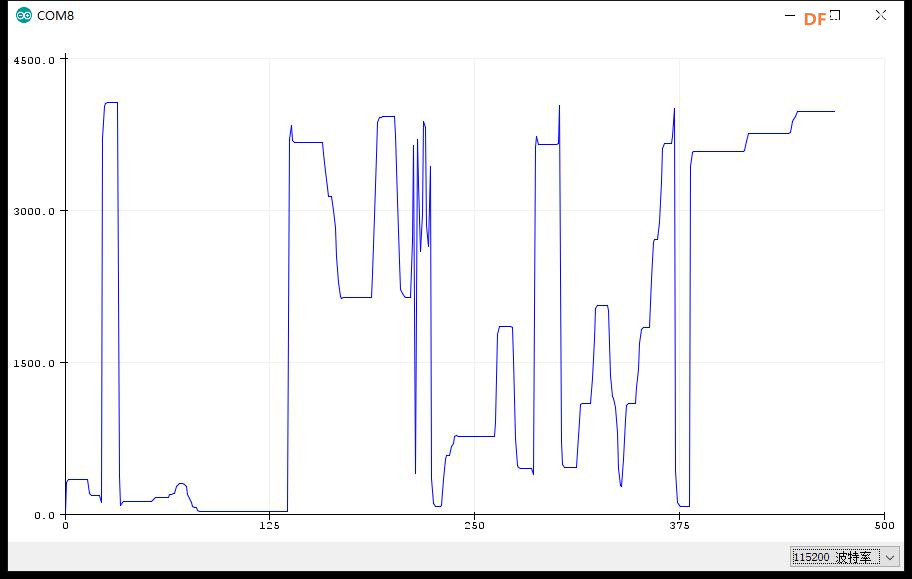 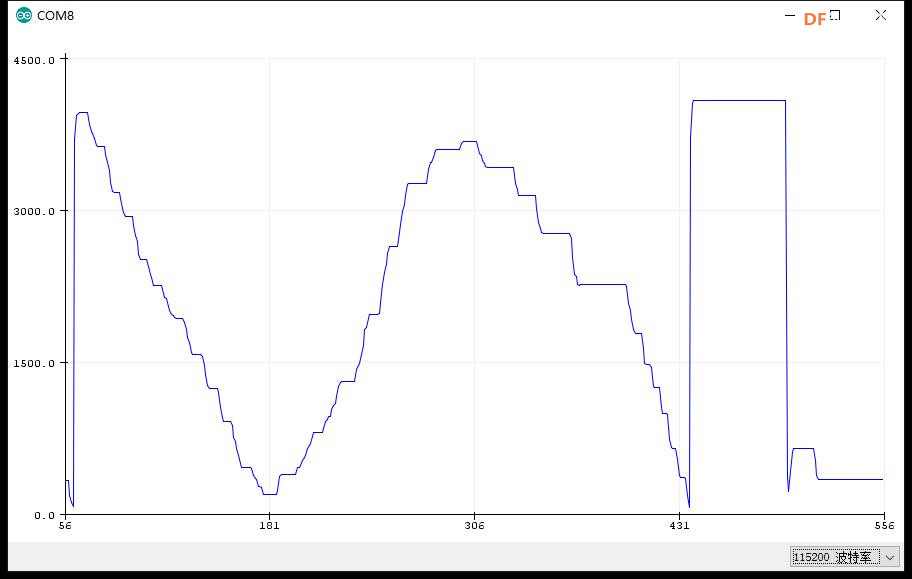 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十:将原始数据转换为度数并在串口绘图监视器中显示 实验开源代码 |
|
要将AS5600传感器的原始数据转换为度数,可以使用以下公式: 角度(度)=(原始数据 / 4096)×360 AS5600传感器的输出范围是0到4095,对应0到360度。 要点解读 1、数据转换:将原始数据除以4096,再乘以360,得到角度值。 2、低通滤波:对转换后的角度值进行低通滤波处理。 3、串口输出:将处理后的角度值通过串口输出,便于在串口绘图监视器中查看。 使用串口绘图监视器 1、打开Arduino IDE。 2、选择工具菜单中的“串口监视器”。 3、在串口监视器窗口中,选择右下角的“绘图”模式。 4、你将看到传感器数据的实时图形显示。 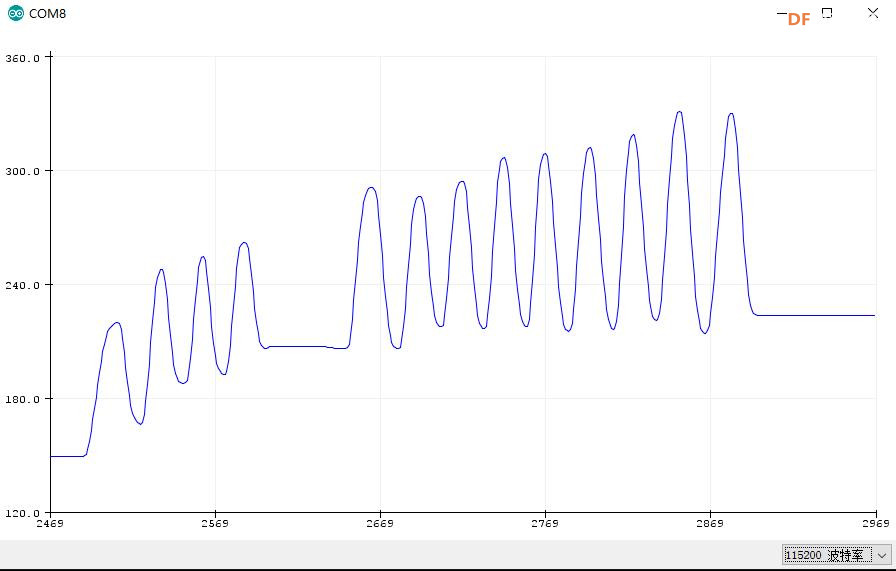 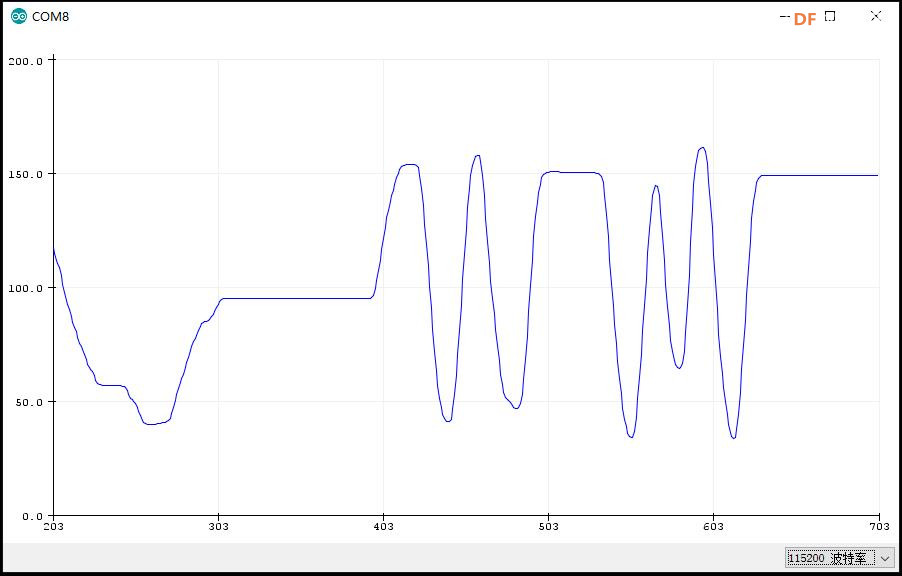 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十一:动态测试步进电机旋转时角度变化的波形,并在串口绘图监视器中显示 实验开源代码 |
|
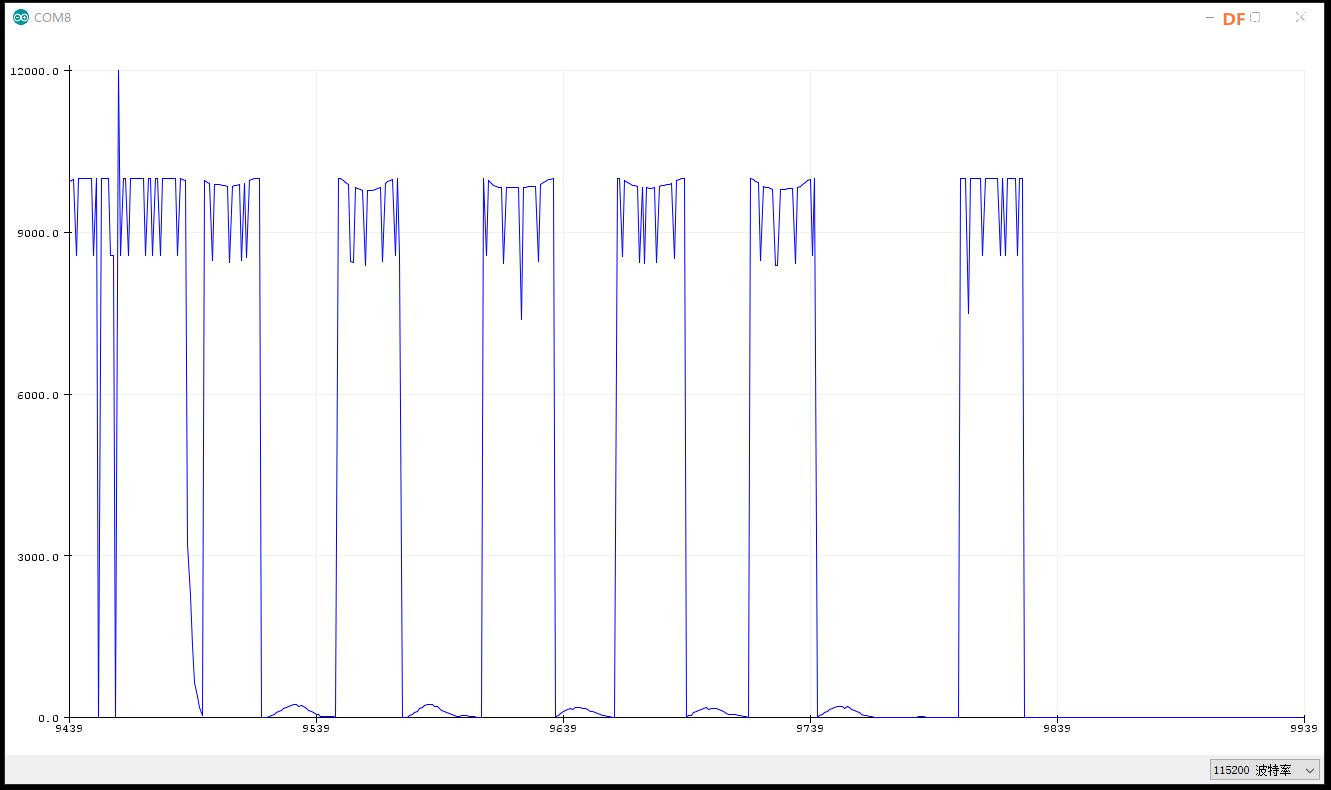
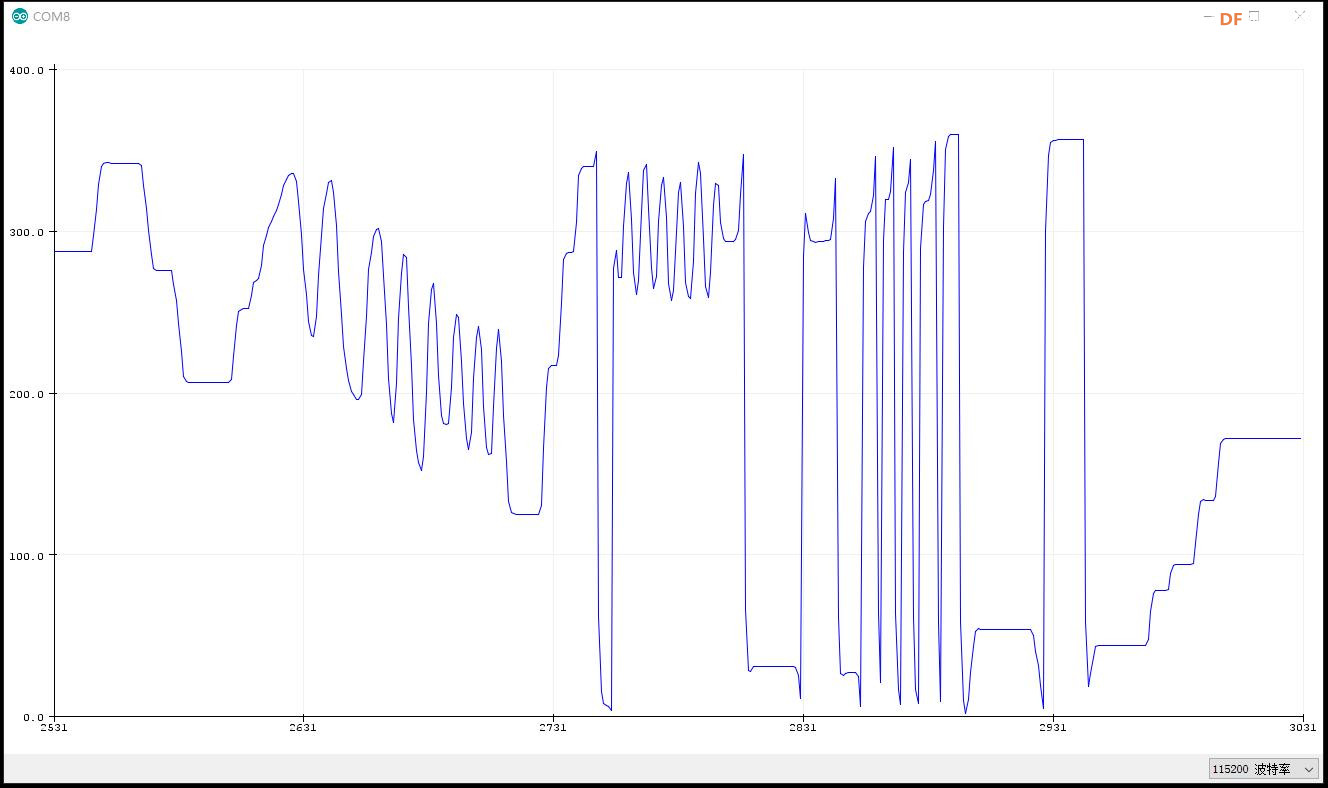
要点解读 I2C初始化:使用Wire.begin()初始化I2C总线。 数据请求:使用Wire.requestFrom()直接向从机发送数据请求信号。 数据读取:使用Wire.read()获取传感器数据。 数据转换:将原始数据除以4096,再乘以360,得到角度值。 低通滤波:对转换后的角度值进行低通滤波处理。 串口输出:将处理后的角度值通过串口输出,便于在串口绘图监视器中查看。 使用串口绘图监视器 打开Arduino IDE。 选择工具菜单中的“串口监视器”。 在串口监视器窗口中,选择右下角的“绘图”模式。 你将看到传感器数据的实时图形显示。 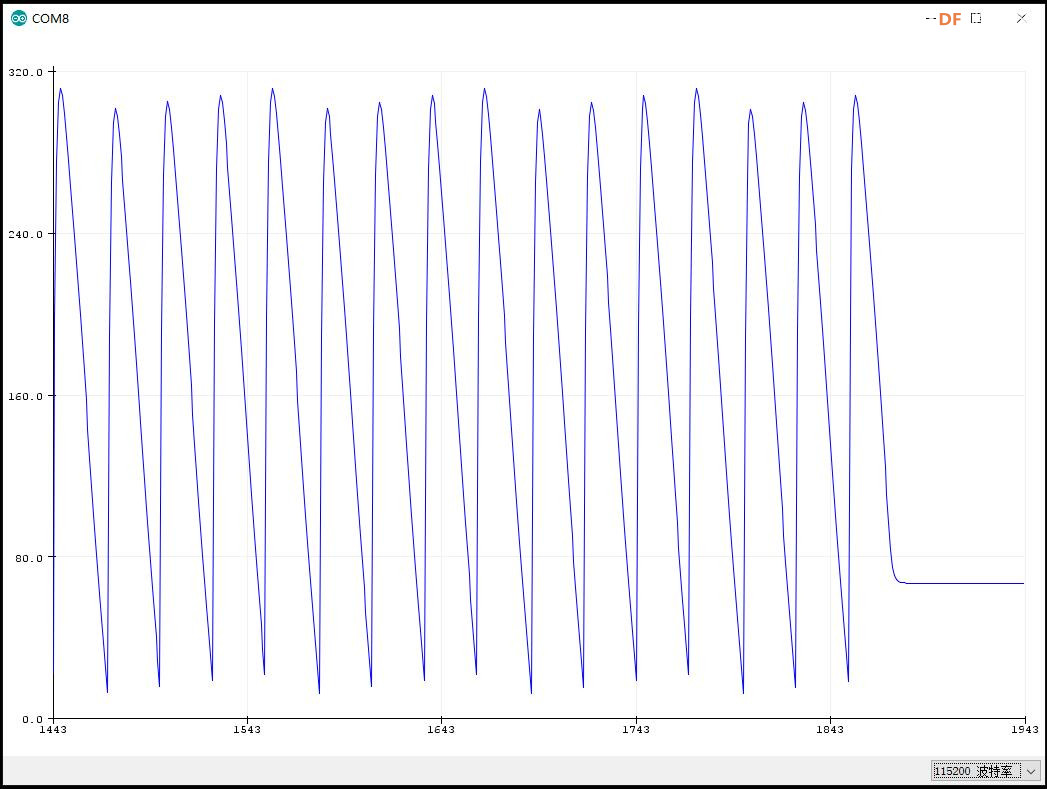 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十二:使用AS5600传感器读取角度数据,并计算步进电机的实时转速 实验开源代码 |
|
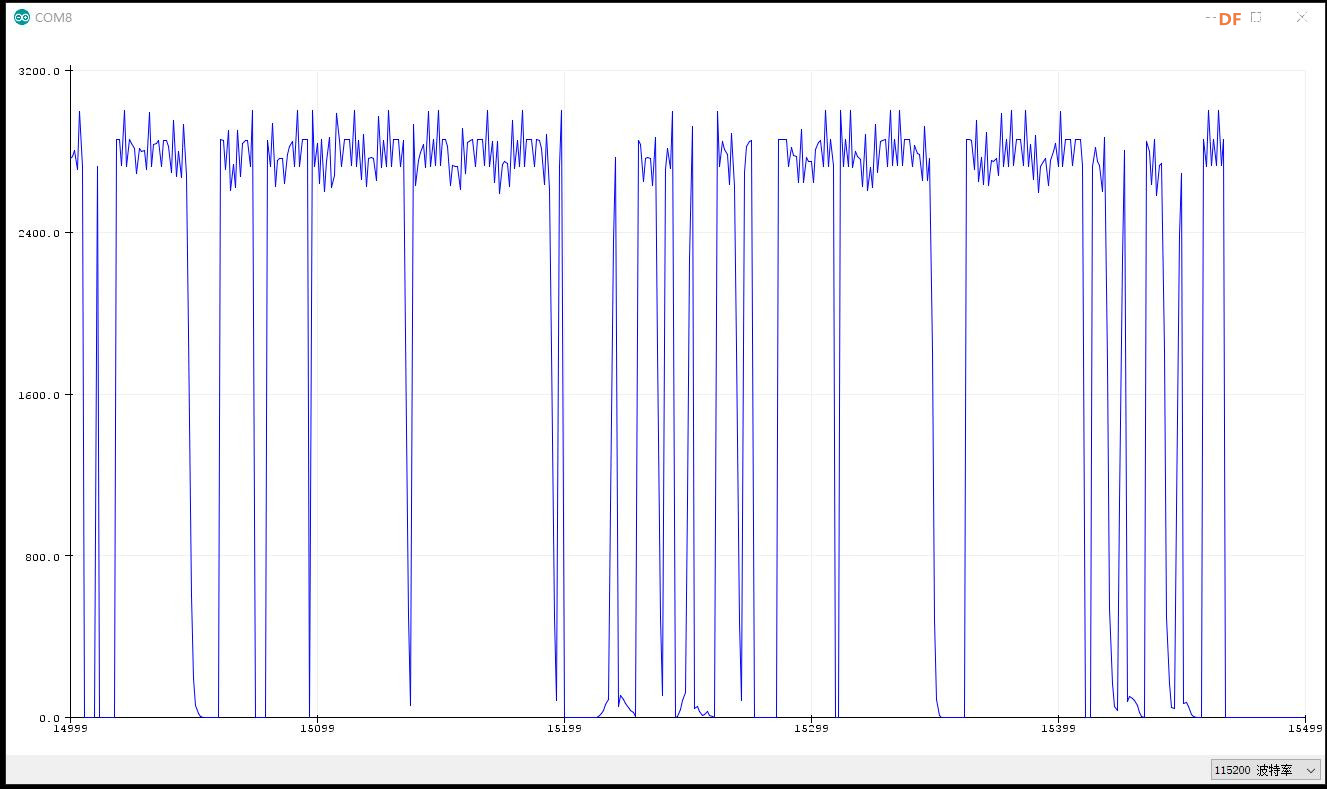
要测量步进电机的实时转速,可以通过计算单位时间内的步数来实现。以上是一个示例代码,使用AS5600传感器读取角度数据,并计算步进电机的实时转速。这个代码会将实时转速显示在Arduino IDE的串口绘图监视器中。 要点解读 数据转换:将原始数据除以4096,再乘以360,得到角度值。 低通滤波:对转换后的角度值进行低通滤波处理。 转速计算:通过计算单位时间内的角度变化量来计算转速(RPM)。 串口输出:将实时转速通过串口输出,便于在串口绘图监视器中查看。 使用串口绘图监视器 打开Arduino IDE。 选择工具菜单中的“串口监视器”。 在串口监视器窗口中,选择右下角的“绘图”模式。 你将看到实时转速的图形显示。 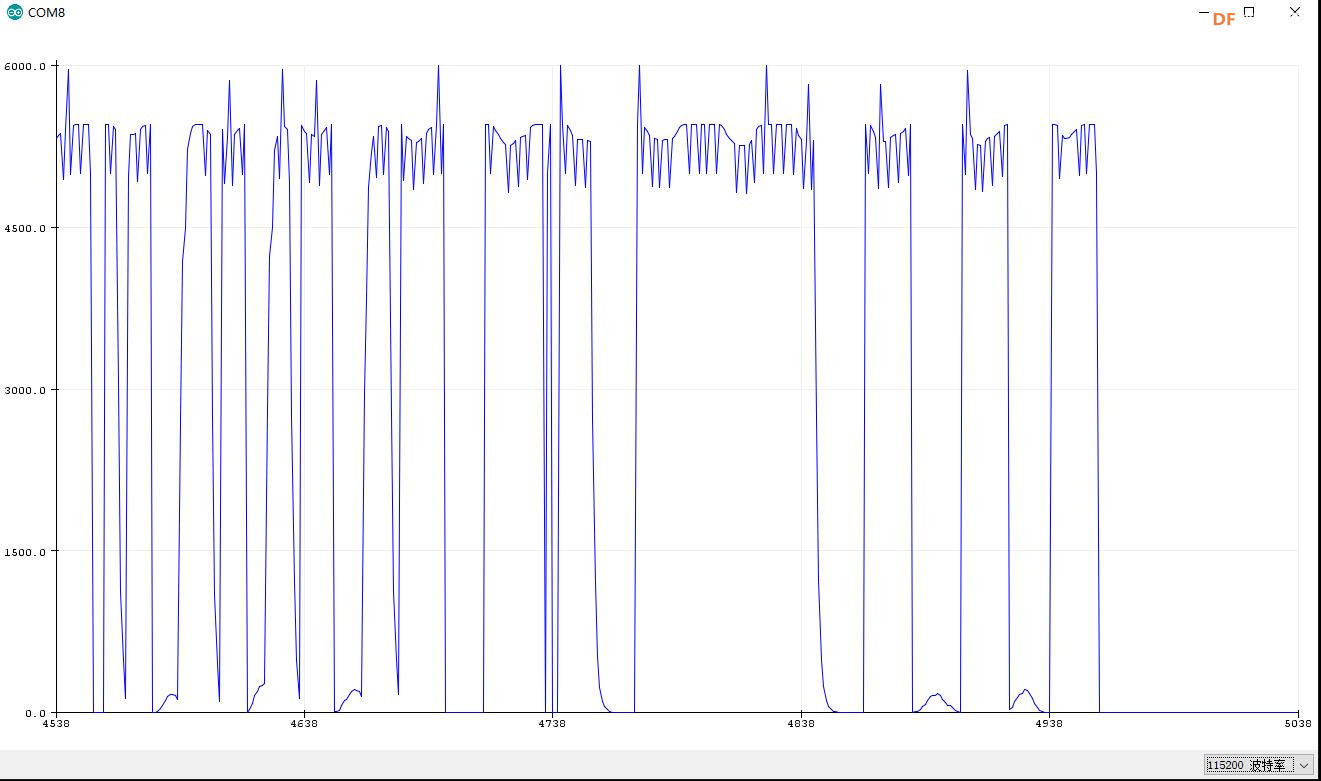 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十三:测量步进电机的实时位置并在Arduino IDE的串口绘图监视器中显示 实验开源代码 |
|
为了测量步进电机的实时位置并在Arduino IDE的串口绘图监视器中显示,可以使用AS5600传感器读取角度数据,并将其转换为度数。 要点解读 1、I2C初始化:使用Wire.begin()初始化I2C总线。 2、数据请求:使用Wire.requestFrom()直接向从机发送数据请求信号。 3、数据读取:使用Wire.read()获取传感器数据。 4、数据转换:将原始数据除以4096,再乘以360,得到角度值。 5、低通滤波:对转换后的角度值进行低通滤波处理。 6、串口输出:将处理后的角度值通过串口输出,便于在串口绘图监视器中查看。 使用串口绘图监视器 1、打开Arduino IDE。 2、选择工具菜单中的“串口监视器”。 3、在串口监视器窗口中,选择右下角的“绘图”模式。 4、你将看到传感器数据的实时图形显示。 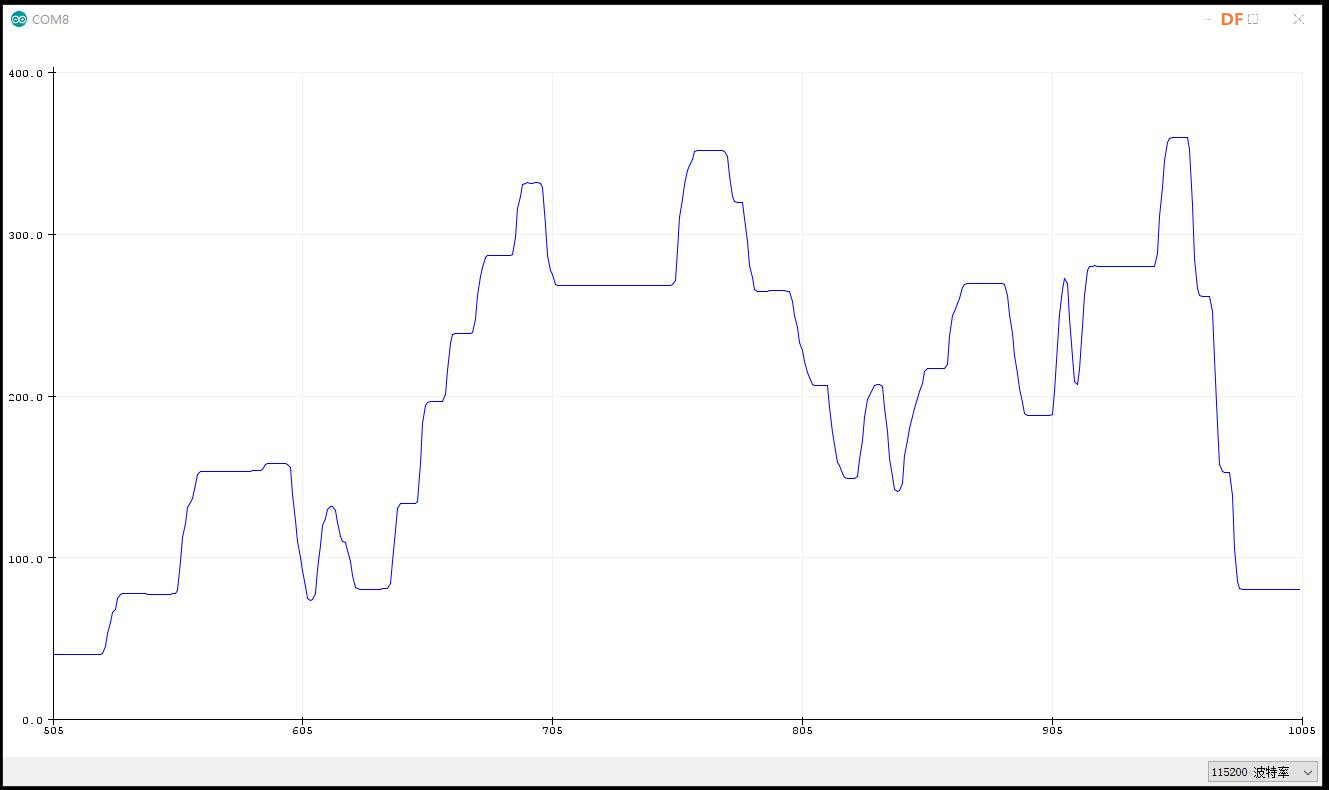 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十四:通过AS5600读取电机轴的实时原始数据和角度值 实验开源代码 |
|
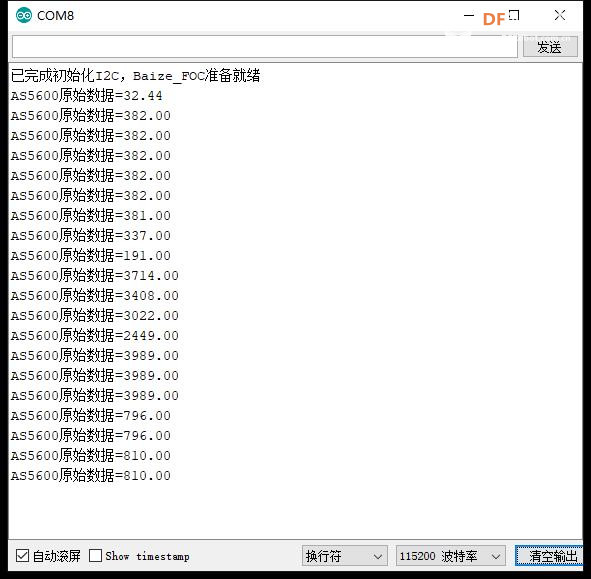
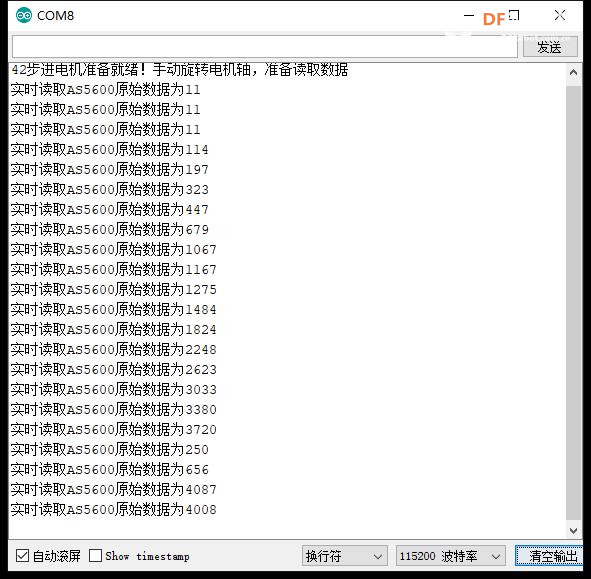
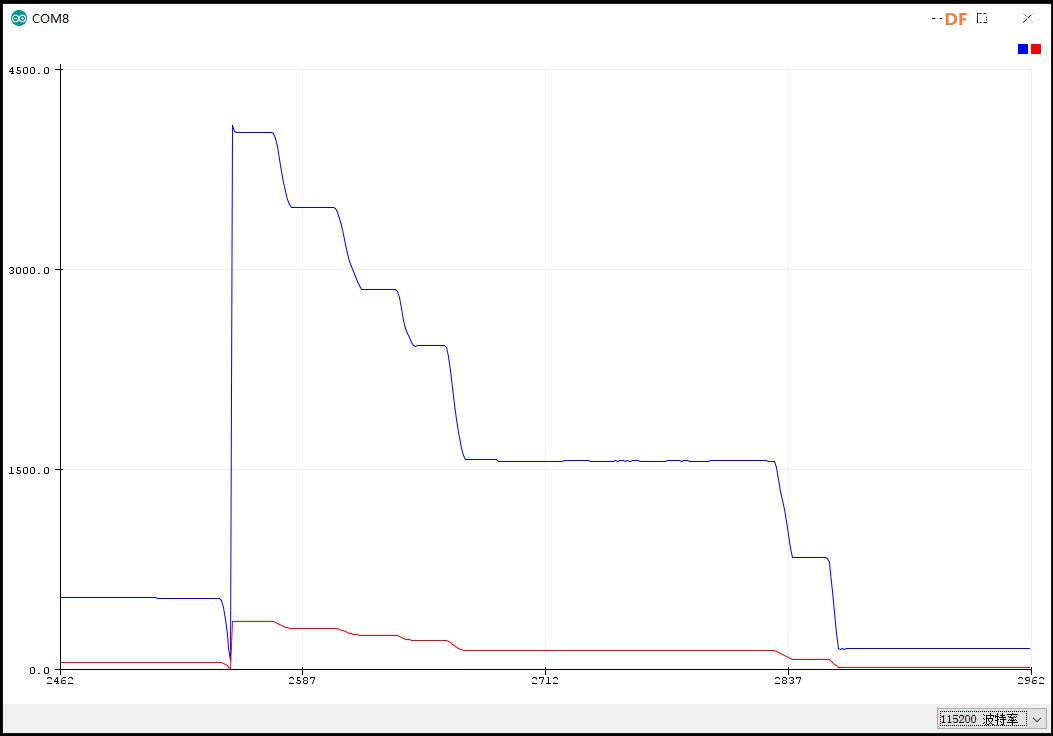
代码的整体要点: 1、库文件导入: #include <Wire.h>:用于I2C通信。 #include <SimpleFOC.h>:用于低通滤波。 2、定义和初始化: LowPassFilter as5600_filter(0.01);:创建一个低通滤波器实例,用于平滑角度数据。 #define AS5600_ADDRESS 0x36:定义AS5600的I2C地址。 #define ANGLE_REG 0x0C:定义角度数据寄存器的地址。 3、设置函数: void setup():初始化串口通信(波特率115200)和I2C通信,并打印初始化完成的消息。 4、主循环: void loop():在主循环中,读取AS5600的原始角度数据,将其转换为角度值,并通过串口打印出来。每次循环后延迟500毫秒。 5、读取角度数据的函数: uint16_t readAS5600Angle():这个函数负责从AS5600读取角度数据。具体步骤包括开始I2C通信、写入寄存器地址、请求数据、读取数据并返回。 这个代码的主要功能是通过I2C接口从AS5600读取原始角度数据,并将其转换为0°到360°之间的角度值,然后通过串口监视器输出。这样可以实时监控AS5600的角度数据。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






