【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
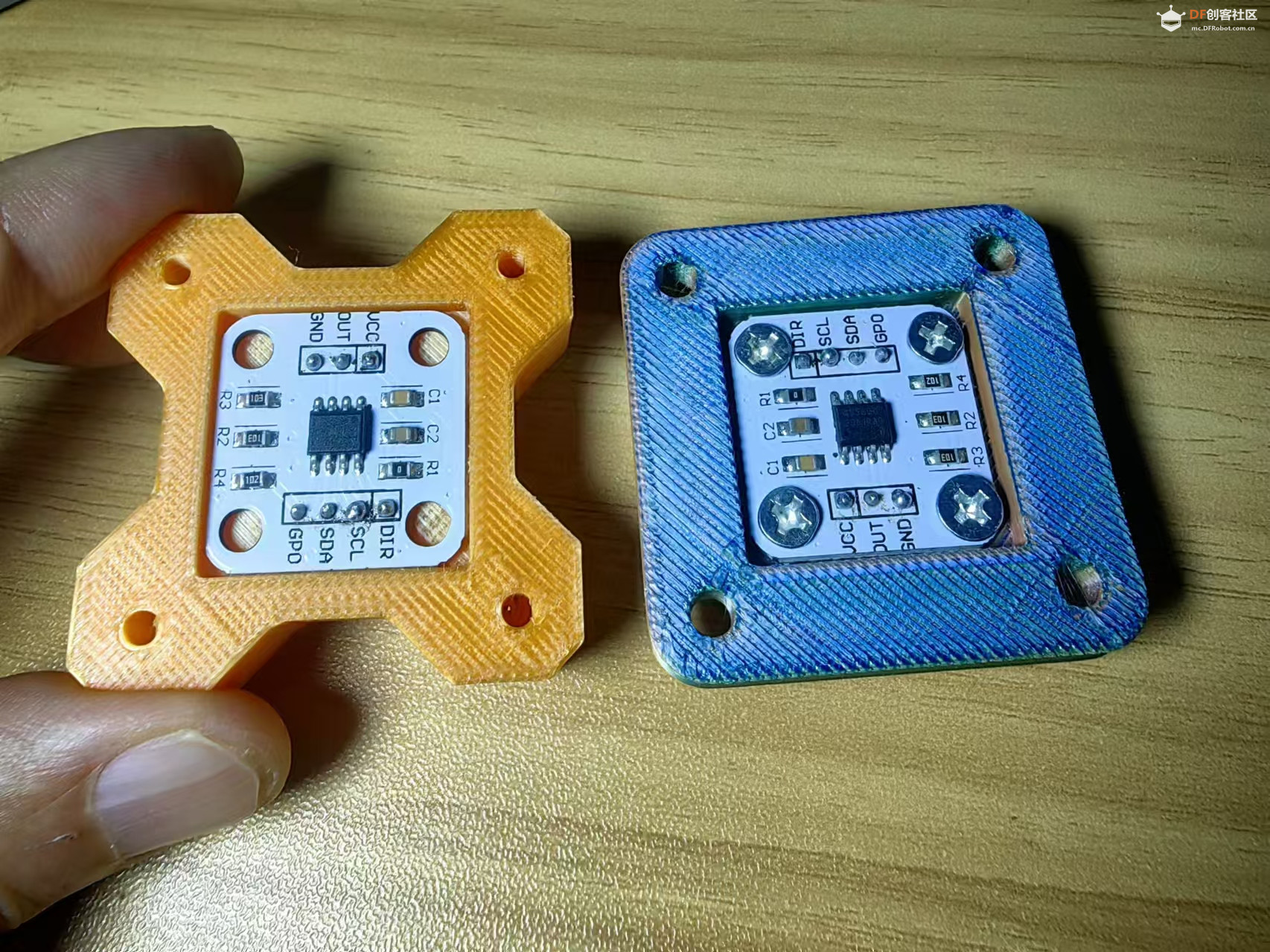
实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块
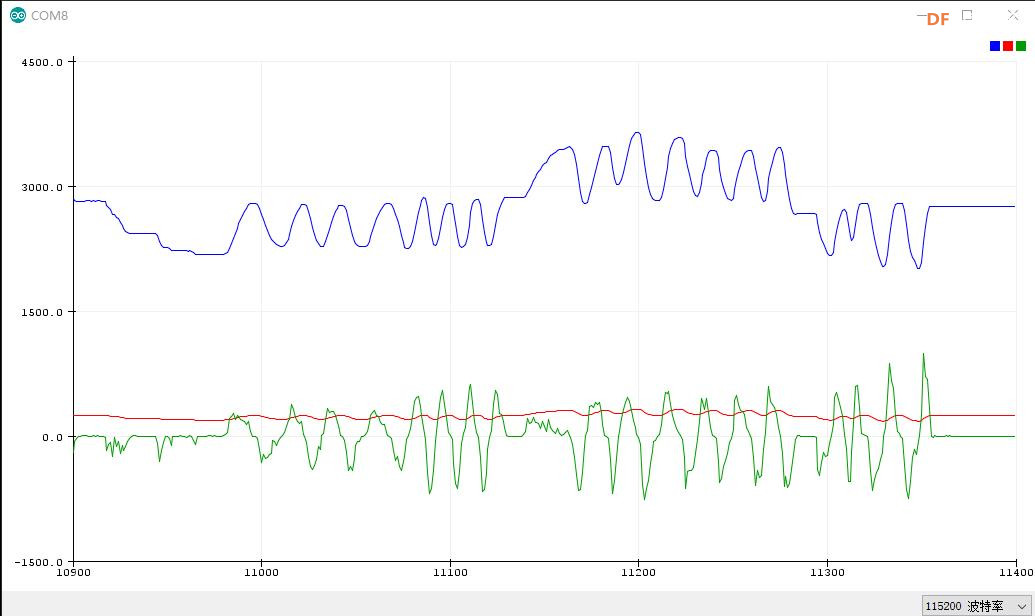
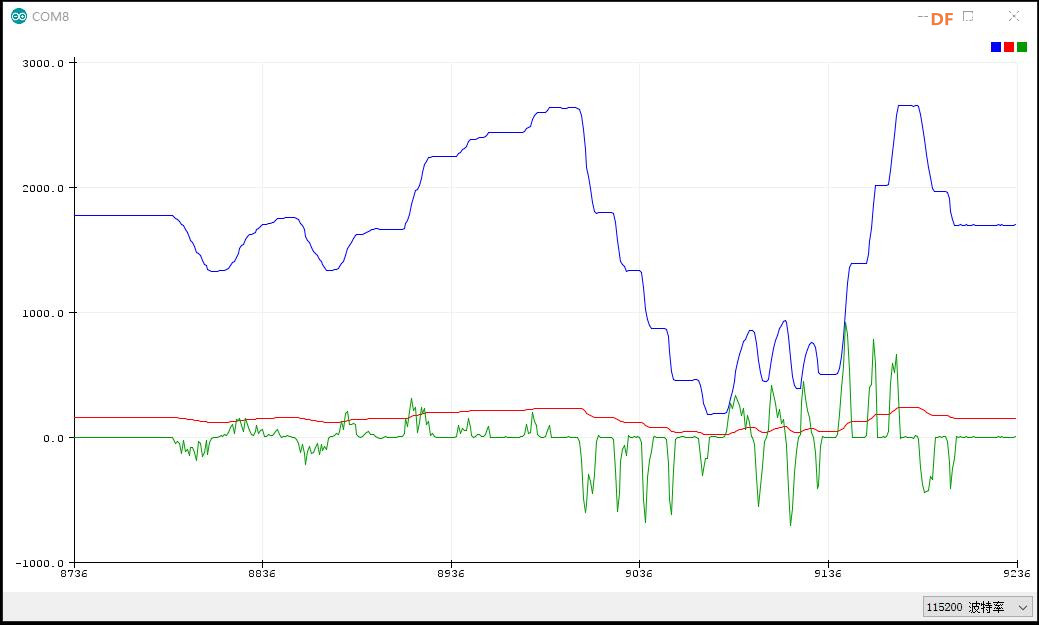
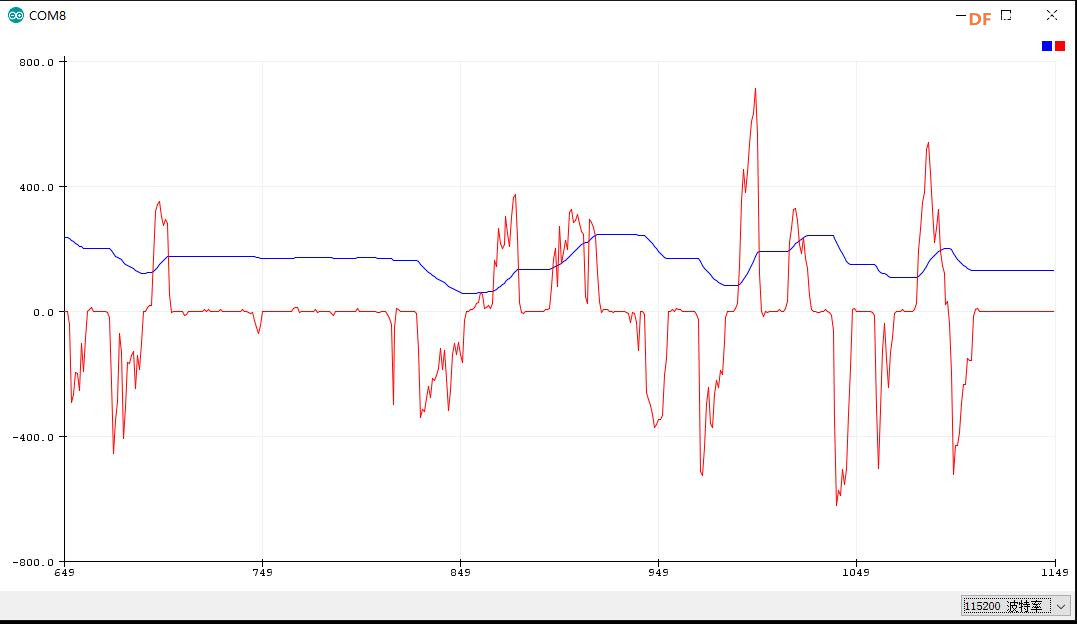
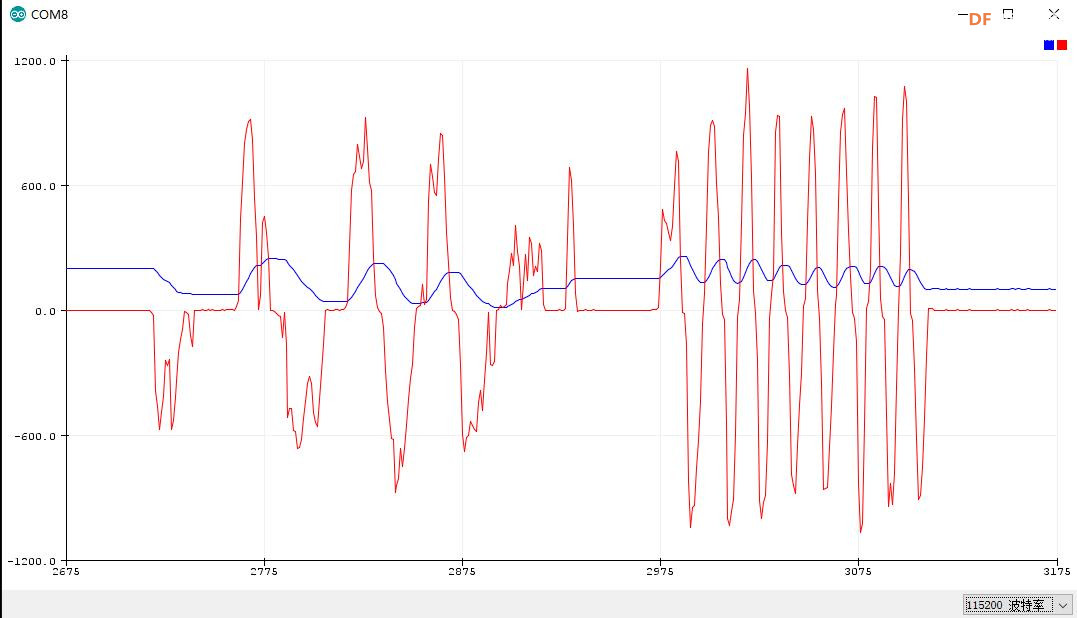
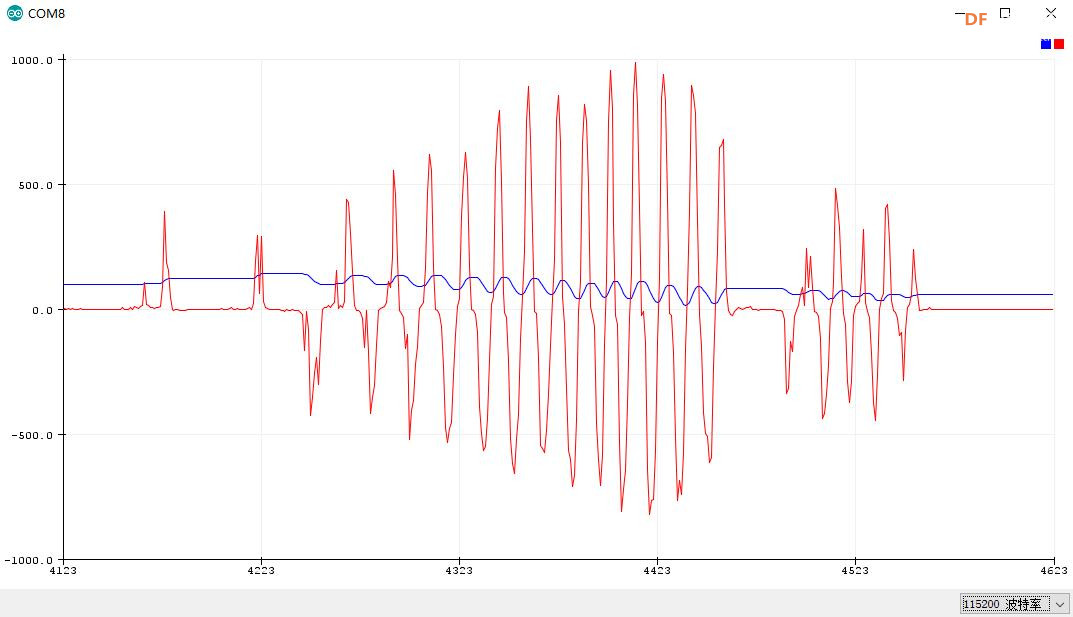
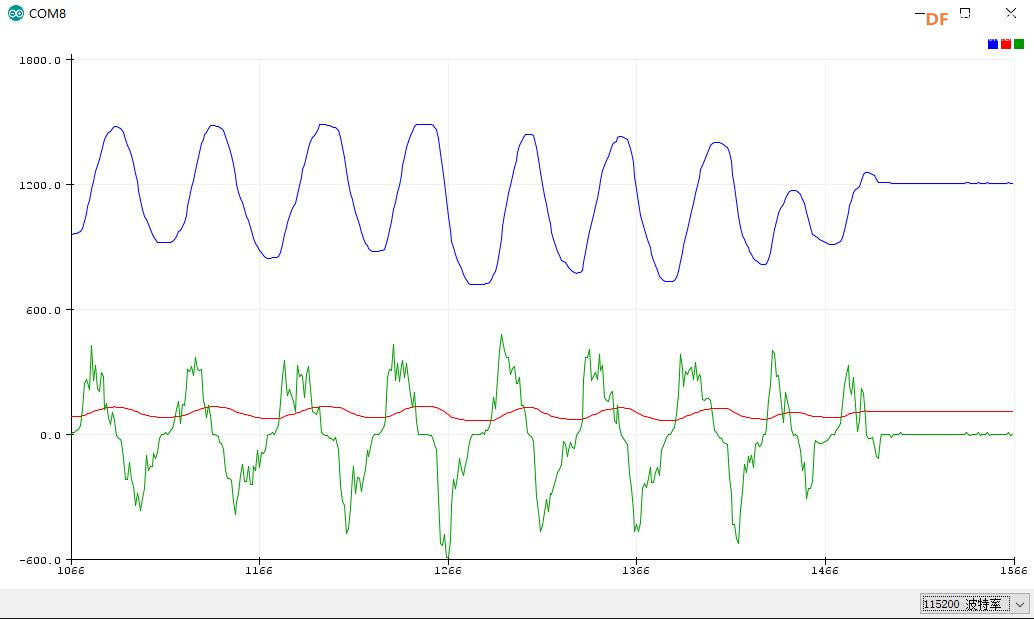
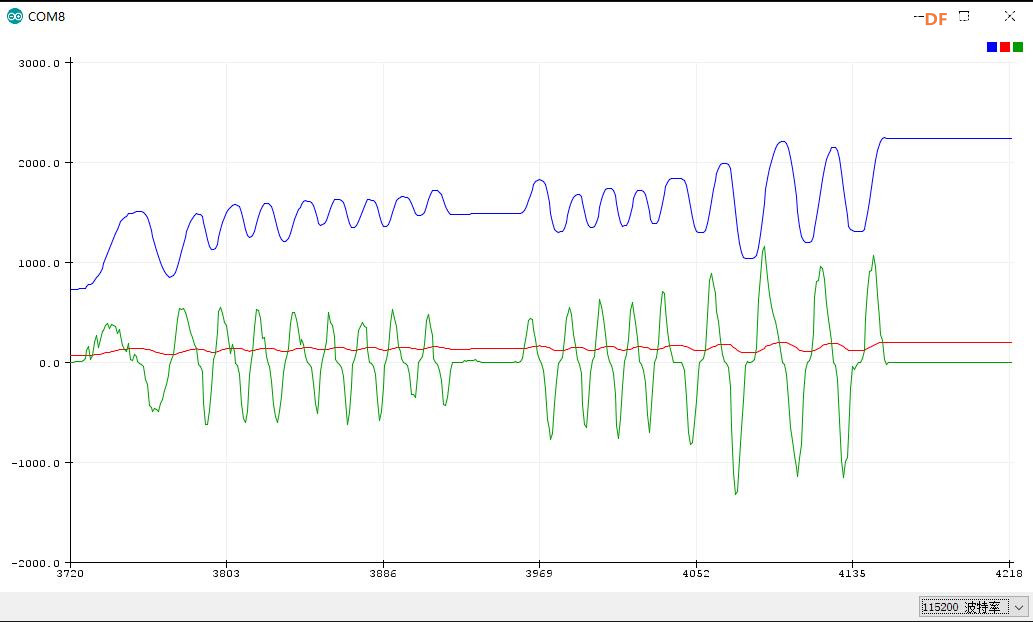
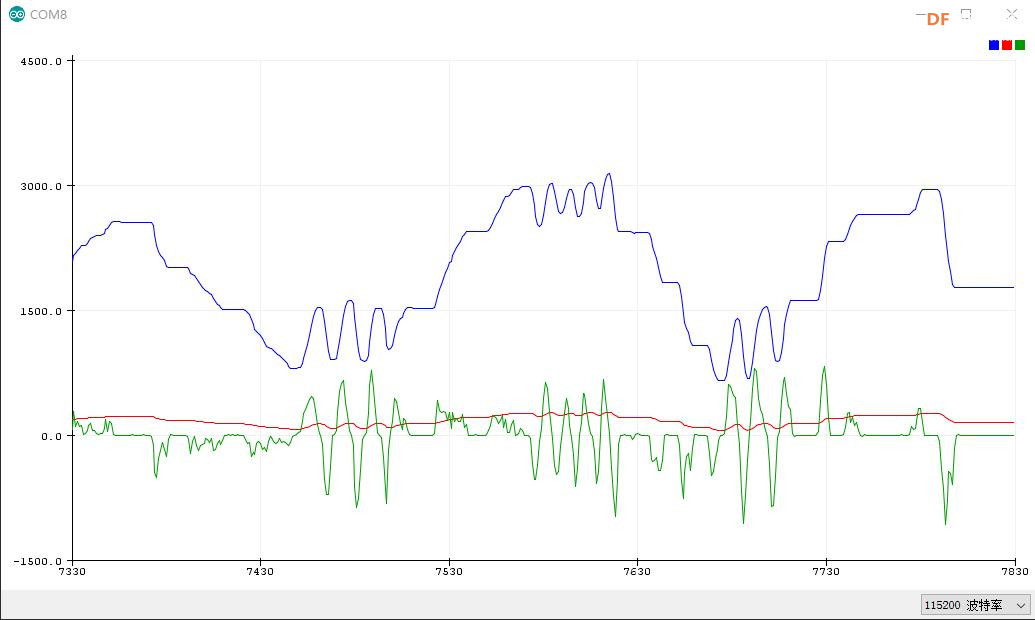
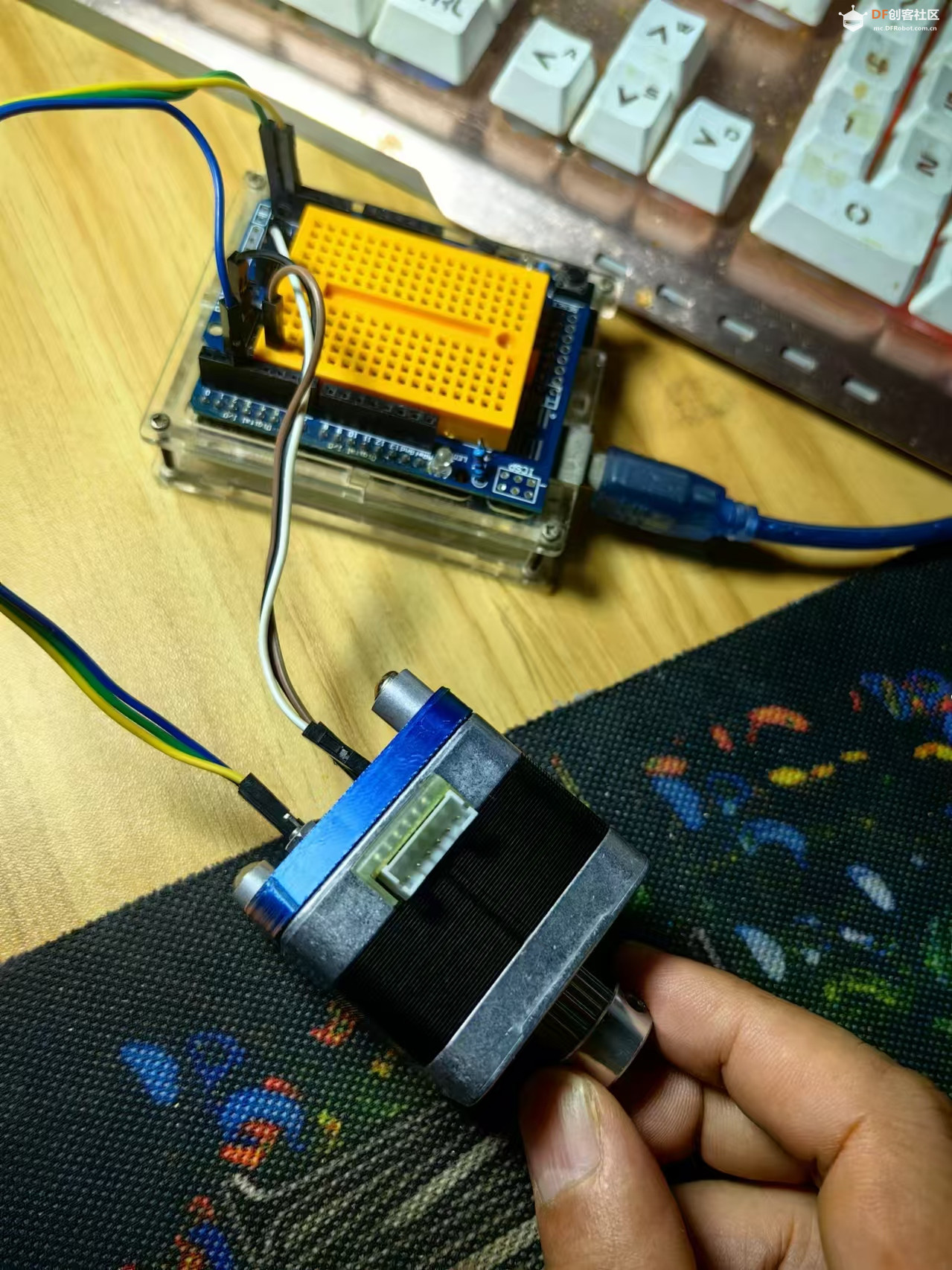
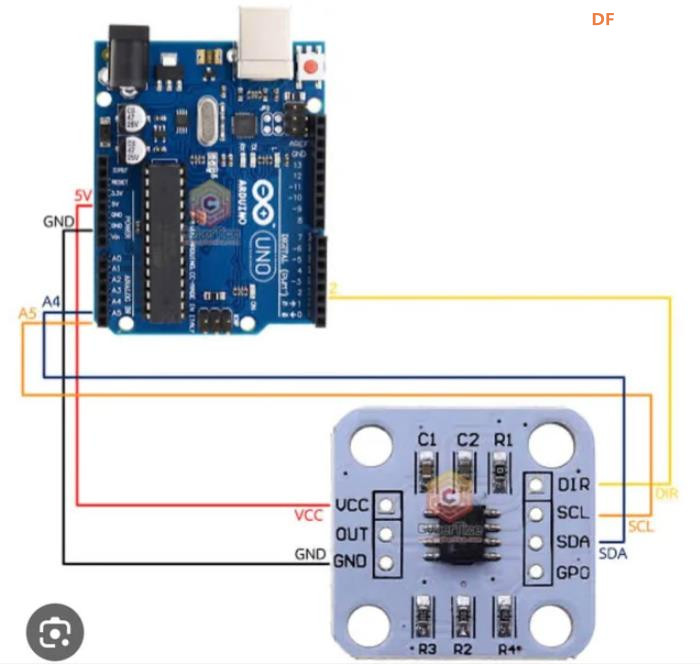
项目实验之十五:转动42步进电机主轴从AS5600读取实时位置和速度值
实验开源代码
- /*
- 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
- 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块
- 项目实验之十五:转动42步进电机主轴从AS5600读取实时位置和速度值
- */
-
- #include <Wire.h>
- #include <AS5600.h>
- #include <SimpleFOC.h>
-
- // 使用SimpleFOC库中的低通滤波器
- LowPassFilter as5600_filter(0.01);
- #define AS5600_ADDRESS 0x36
- #define ANGLE_REG 0x0C
-
- AS5600 encoder;
-
- void setup() {
- Serial.begin(115200);
- Wire.begin(); // 初始化I2C
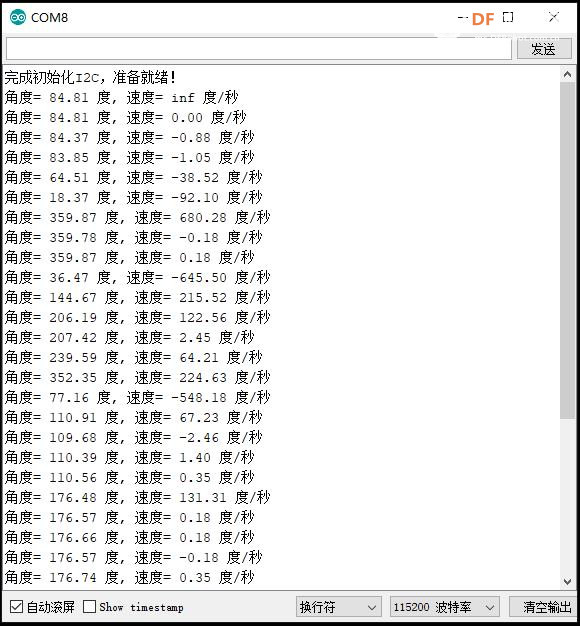
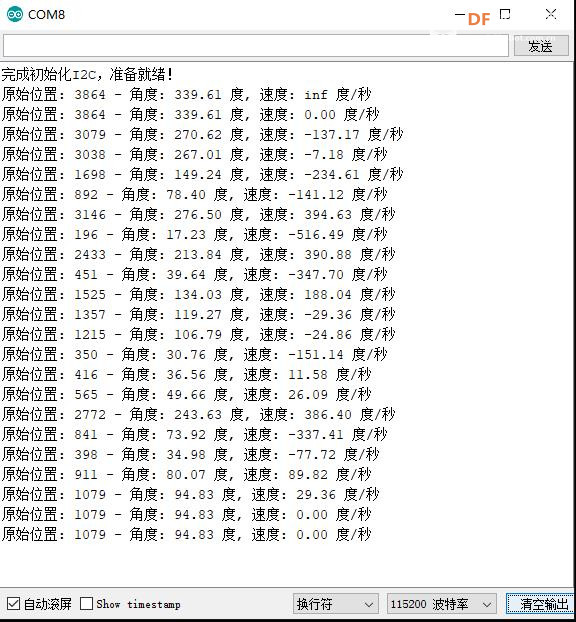
- Serial.println("完成初始化I2C,准备就绪!");
- }
-
- void loop() {
- // 读取位置
- uint16_t position = encoder.getCumulativePosition();
- float angle = fmod(position * 0.08789, 360.0);// 将位置值转换为角度(0.08789度/LSB)
-
- // 计算速度
- static float last_angle = 0;
- static unsigned long last_time = 0;
- unsigned long current_time = millis();
- float delta_time = (current_time - last_time) / 1000.0; // 转换为秒
- float speed = (angle - last_angle) / delta_time; // 角速度,单位为度/秒
-
- // 打印位置和速度
- Serial.print("角度= ");
- Serial.print(angle);
- Serial.print(" 度, 速度= ");
- Serial.print(speed);
- Serial.println(" 度/秒");
-
- // 更新上一次的角度和时间
- last_angle = angle;
- last_time = current_time;
-
- delay(500); // 延迟500毫秒
- }
| 



 沪公网安备31011502402448
沪公网安备31011502402448

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






