|
1871| 7
|
[项目] 【花雕学编程】Arduino动手做(230)---ESP32-CAM MG996R舵机2 |
 ESP32-CAM 是一款非常小的摄像头模块,配备 ESP32-S 芯片。除了 OV2640 摄像头和几个用于连接外围设备的 GPIO 外,它还具有一个 microSD 卡插槽,可用于存储 使用摄像头拍摄的图像或存储文件以提供给客户。包括乐鑫 ESP32-S Wifi + 蓝牙+BLE 芯片、2MP 摄像头模块 OV2640 和带有 CH340 UART 芯片的 USB 编程适配器。 ESP32-Cam 是一款运行在 ESP32-S 芯片上并使用 OV2640 摄像头的小型摄像头模块。ESP32_Cam 也可以 OV7670 摄像头,但 OV2640 更好(更高的分辨率和内置的 JPEG 编码,这消除了 ESP32-S 的处理任务)。 ESP-32 Cam 规格 ESP-32 系列 它支持 Wi-Fi (802.11b/g/n) 支持蓝牙 (4.2 带 BLE) 内置 LED 闪光灯 9 个 IO 端口 支持 UART、SPI、I2C 和 PWM 内置 micro SD 读卡器 输入电源:3.3V / 5V(据报道,5V 供电比 3.3V 更稳定) OV2640 摄像头 2 百万像素 阵列尺寸:UXGA (1600 x 1200) 镜头尺寸:1/4 英寸(6.35 毫米) 最大图像传输速率:15 帧/秒 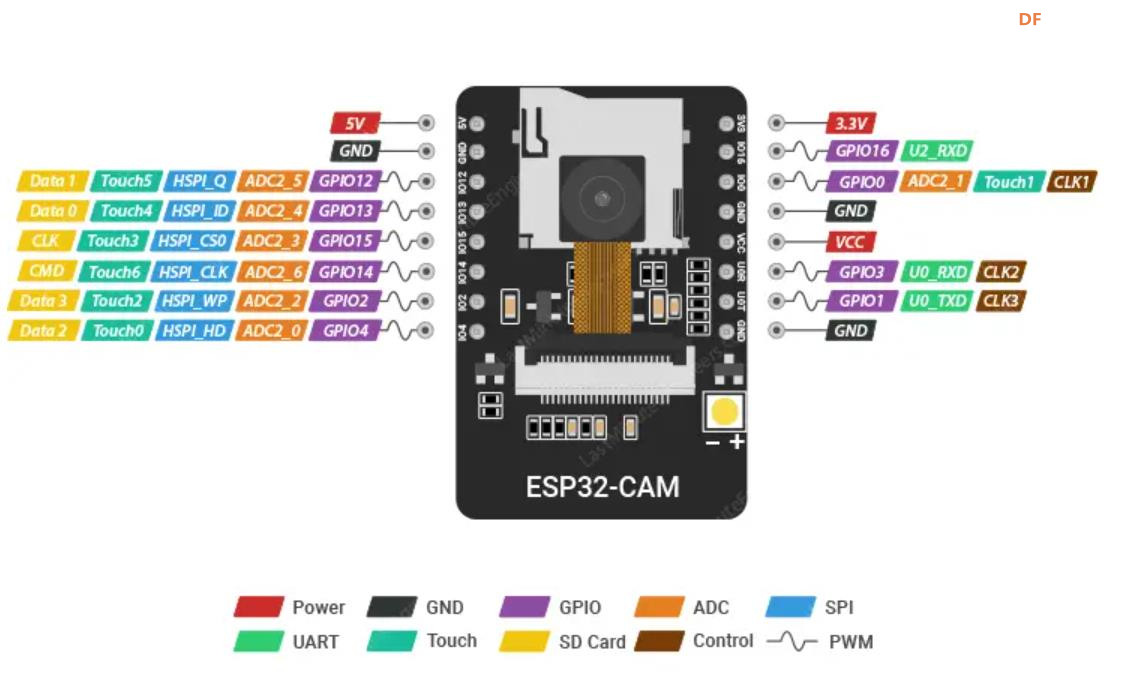 |
|
MG996R舵机是一种高性能的舵机,它具有金属齿轮和双轴承设计,能够提供高扭矩和稳定的运行。以下是MG996R舵机的一些主要特性和应用: 1、结构材质:MG996R舵机采用金属齿轮,这使得它比塑料齿轮的舵机更加耐用,能够承受更大的负载。 2、连接线长度:MG996R舵机的连接线长度为30厘米,其中包含信号线(黄线)、电源线(红线)和地线(棕色)。 3、尺寸和重量:其尺寸为40.7mm × 19.7mm × 42.9mm,重量为55克。 4、反应转速:在无负载的情况下,MG996R舵机的速度为0.17秒/60度(在4.8V下)和0.13秒/60度(在6.0V下)。 5、工作死区:MG996R舵机的工作死区为4微秒。 6、工作电压:MG996R舵机的工作电压范围是3.0V到6.0V。 7、工作扭矩:在4.8V的工作电压下,MG996R舵机的工作扭矩为13KG/cm。 8、控制方法:MG996R舵机通过PWM(脉冲宽度调制)信号进行控制。对于360度舵机,PWM信号的周期为20ms,其中脉冲宽度在0.5ms到2.5ms之间。舵机的控制不仅包括方向,还包括速度。舵机正转时,脉冲宽度在0.5ms到1.5ms之间变化,对应不同的速度;舵机反转时,脉冲宽度在1.5ms到2.5ms之间变化。 9、应用:MG996R舵机由于其高扭矩和快速响应的特点,被广泛应用于机器人、遥控飞机、遥控车模以及其他需要精确控制的领域。 10、注意事项:在使用MG996R舵机时,需要注意PWM信号的分辨率应调制到0.1ms,以确保舵机能够平滑地改变方向和速度。 MG996R舵机的这些特性使其成为一个多功能和可靠的执行元件,适用于各种需要精确控制角度和速度的应用。  |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百三十:ESP32 CAM开发板 带OV2640摄像头模块 WIFI+蓝牙模块 项目实验之二十七:使用ESP32-CAM驱动360度MG 996R舵机2 实验开源代码 |
|
代码解读: 1、库兼容性:确保使用与硬件兼容的库。ESP32不支持标准的Servo库,需要使用ESP32Servo库。 2、正确安装库:通过Arduino IDE的库管理器安装所需的库,确保代码能顺利编译和运行。 3、引脚配置:在ESP32开发板上,正确配置舵机连接的引脚。代码中的示例将舵机连接到引脚16。 4、初始化与配置:在setup函数中初始化串口通信,并附加舵机到指定引脚。 5、循环控制:在loop函数中控制舵机位置的变化,通过简单的for循环实现舵机的来回转动。 实验场景图  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶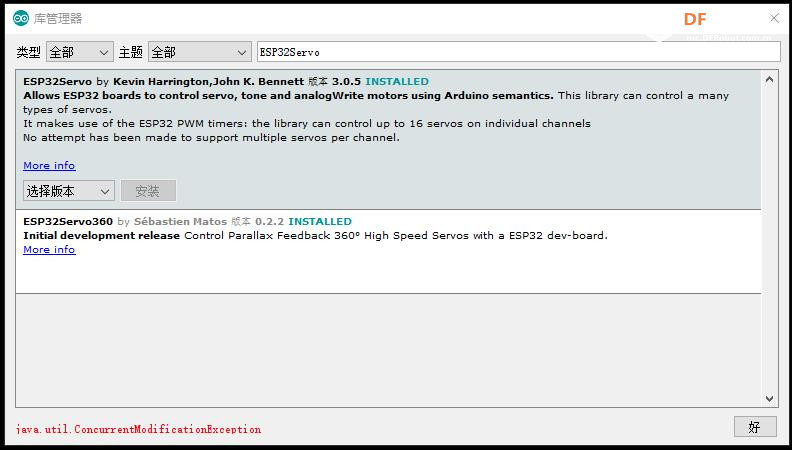



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






