|
19063| 0
|
[K10项目分享] 行空板k10——行空数码时钟创新智造 |

|
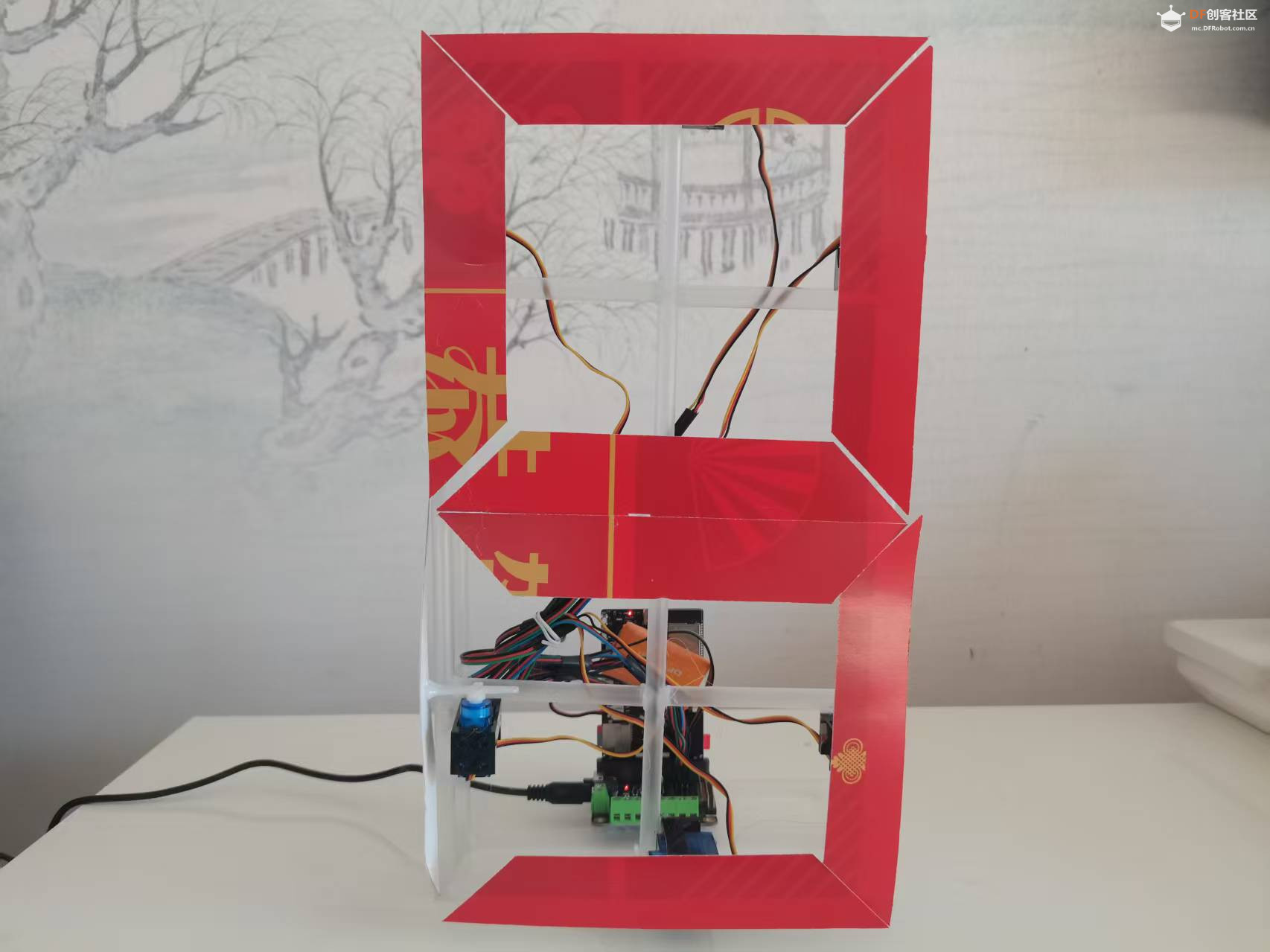
本帖最后由 云天 于 2025-2-10 11:36 编辑 一、项目来源 本项目基于新课标中对“人工智能与物联网”融合教育理念的要求,注重培养学生的科技创新思维与跨学科实践能力。让学生在制作行空数码时钟的过程中,不仅能够深入学习行空板的编程与应用,还能掌握舵机驱动、语音识别、网络通信及数据处理等多学科知识。借助行空板K10强大的计算能力和丰富的拓展接口,结合语音交互、物联网技术,打造一款功能齐全新颖别致的时间与天气信息展示工具。 二、项目介绍 1. 项目背景 在科技日新月异的当下,精准掌握时间与实时了解天气状况对于人们的日常生活至关重要。传统的电子时钟功能相对单一,而便捷获取天气信息的渠道又大多依赖手机等设备。基于此,我们创意性地设计出行空数码时钟,旨在通过一个装置实现时间显示和天气信息查询两项重要功能,满足人们对便捷生活的需求。 望通过此项目,引导学生学习跨学科知识,激发他们的创造力。在项目实施过程中,学生将深入学习编程、电子、机械等知识,掌握行空板编程、舵机控制、语音识别等技能。同时,鼓励学生细心观察生活,发现传统时钟与天气信息获取方式的不足,思考如何将两者结合,创造出更便捷、实用的产品。行空数码时钟项目不仅能满足人们对便捷生活的需求,还能成为学生学习知识、锻炼能力、激发创意的有力工具。 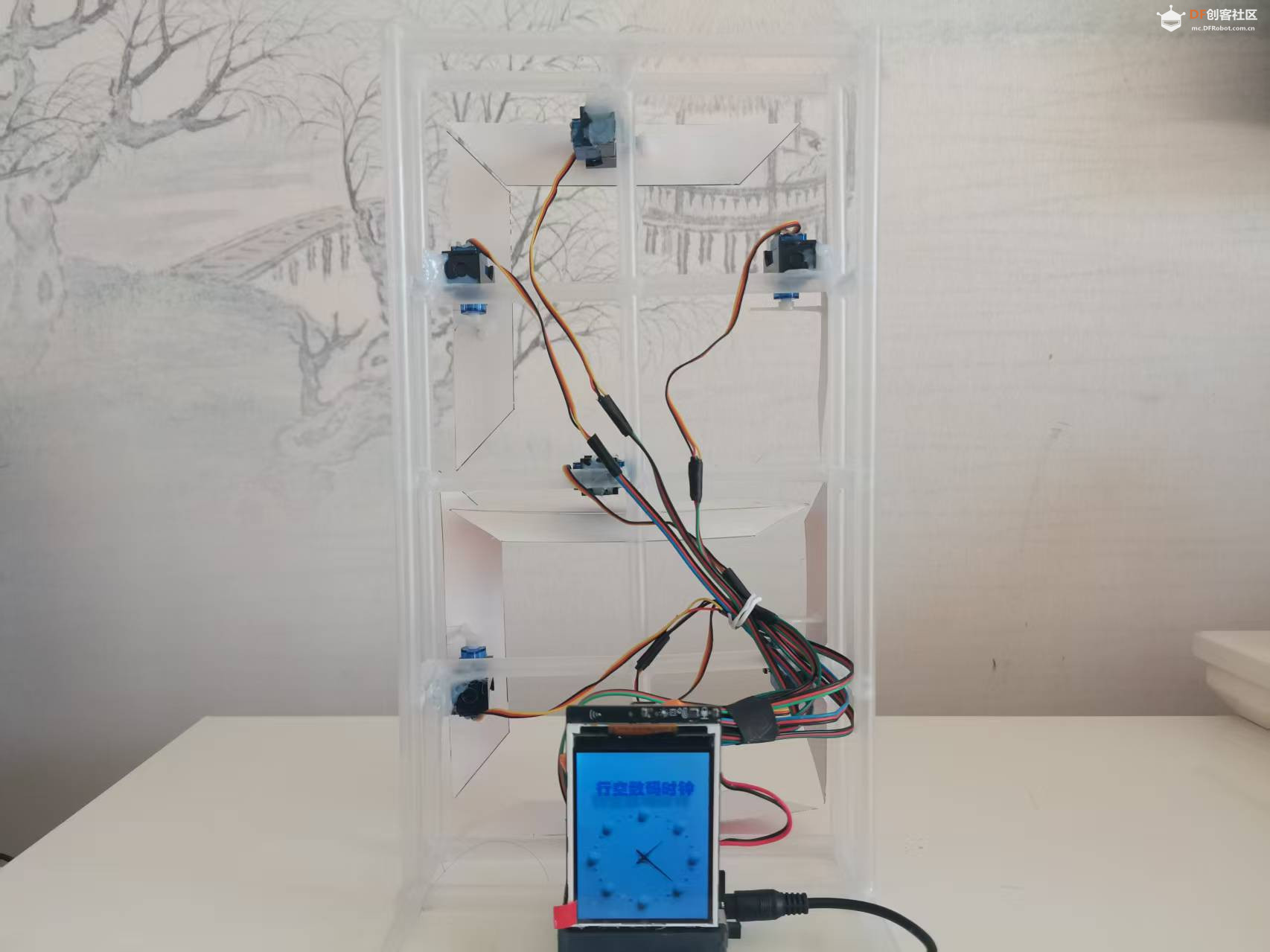 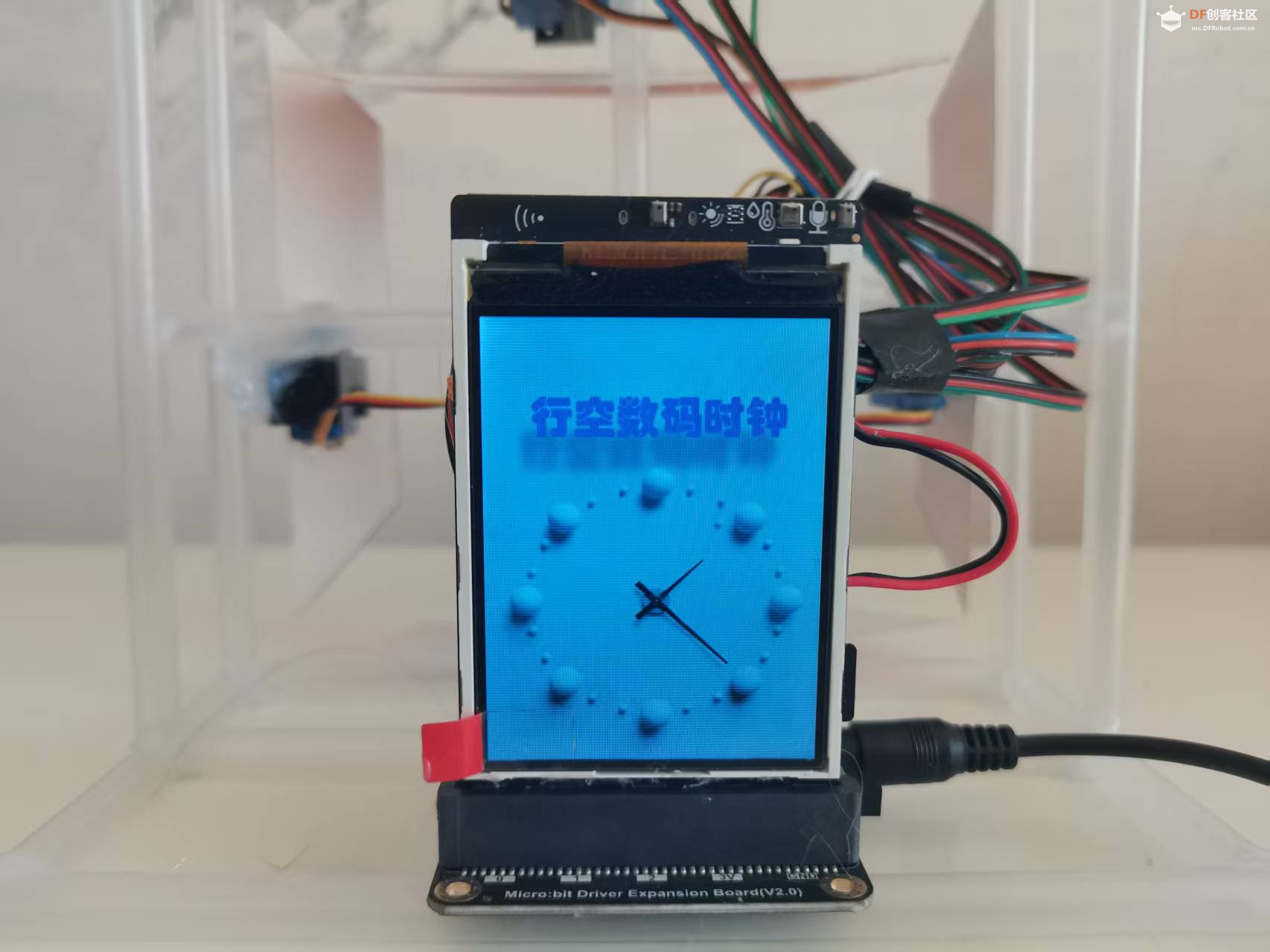 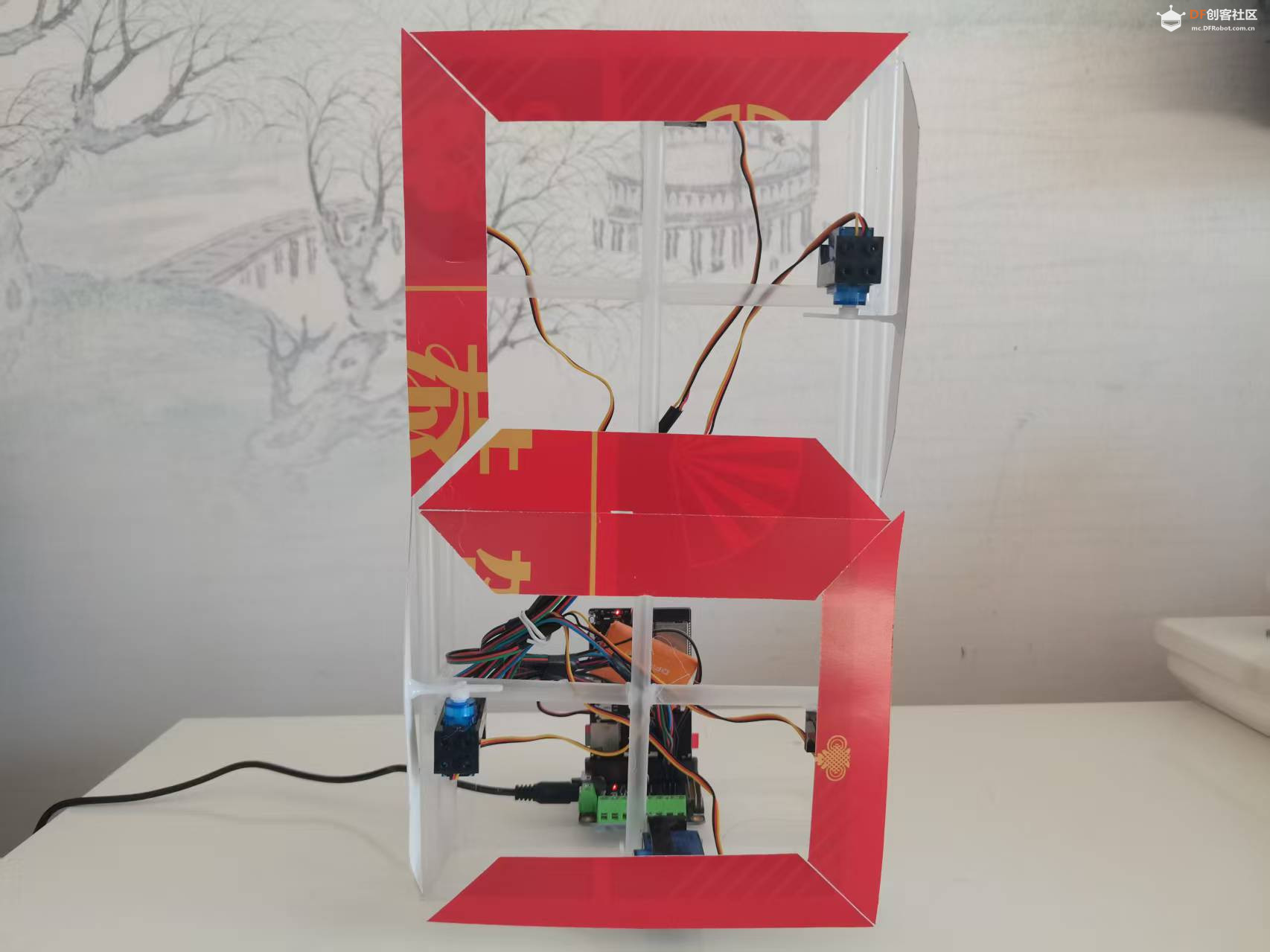 2. 项目特色
 3. 项目功能
三、项目原理 1. 行空板 K10 作为核心控制单元:行空板 K10 搭载高性能处理器,负责整个时钟系统的控制与运算。其不仅承担程序运行、数据处理的任务,还具备丰富的输入输出接口,能便捷地连接各种外围设备与传感器,通过加载不同的代码程序,驱动舵机精准动作,实现仿数码管数字的动态显示,并同步管理语音识别功能,处理来自网络的天气数据信息,是整个数码时钟的大脑中枢。 2. 舵机驱动仿数码管显示数字:7 个 9g 舵机按特定顺序排列组成单个仿数码管。每个舵机精准控制角度,模拟数码管的发光段,不同的组合角度对应不同的数字或符号显示。行空板 K10 根据需要显示的数字信号,发送特定指令至舵机驱动板,驱动板按序驱动相应舵机转动至预设角度,呈现出 0 至 9 的数字形态,实现直观生动的数字视觉化效果。 3. 语音识别功能实现语音交互:语音识别模块基于机器学习算法,可准确识别用户的语音指令。当用户说出特定的唤醒词时,语音识别模块迅速激活,进入等待指令状态。当用户发出如“显示时间”“查看天气”等指令时,行空板 K10 接收并解析指令,即时调用对应的程序功能模块,完成相关操作,反馈结果给用户,实现便捷的语音交互控制。 4. 网络通信实现天气数据获取:借助 Wi-Fi 连接互联网,行空板 K10 可与网络上的天气服务 API 实现通信。通过发送特定格式的 HTTP请求,访问天气数据接口,获取包括实时气温、最高气温、最低气温及天气状况描述等丰富气象信息。返回的天气数据以 JSON 格式呈现,行空板 K10 利用Mind+内置的 JSON 解析库,快速提取出关键数据信息,如温度值等,再进行相应的数据处理和格式转换,最终以简洁明了的形式展示在仿数码管上,为用户提供及时准确的天气资讯。 5. 时间服务器访问获取准确时间:行空板 K10 连接时间服务器,获取精准的网络时间。通过网络时间协议(NTP)与互联网上的时间服务器进行同步,确保显示的时间准确无误。时间服务器会定期回传标准时间数据,行空板 K10 将这些时间数据解析后,按照预定的显示规则,通过控制舵机的动作,转化为仿数码管上形象直观的时间数字显示,让用户无论何时何地都能获取与世界标准时间同步的精确时间。 四、项目知识点 1. 行空板 K10 编程与应用:学习基于行空板K10的 Mind+ 编程环境,包括程序结构、语法、函数定义与调用等基础编程知识,以及如何利用行空板的硬件资源(如 GPIO 接口、Wi-Fi 模块等),实现各种功能的开发与拓展应用,培养学生的编程思维能力和硬件操控技能。 2. 舵机控制原理:理解舵机的内部结构、工作原理和控制方式,包括舵机的驱动信号(PWM 信号)的产生、传输和解析过程,以及如何通过行空板向舵机发送精确的控制指令(如设置目标角度、控制转动速度等),实现对多个舵机的协同控制,完成复杂的运动控制任务,拓展学生对机电一体化系统的认知。 3. 语音识别技术基础:了解语音识别的基本概念、工作流程和技术原理,包括语音信号的采集、预处理、特征提取、模型训练与识别等关键环节,认识常见的语音识别算法和模型(如深度神经网络等),以及如何利用行空板K10的语音识别模块(如基于语音特征匹配的简单的模板匹配算法)实现对特定关键词或指令的识别与响应,提升学生对智能语音交互技术的理解。 4. 网络通信协议与数据传输:掌握 Wi-Fi 网络的基本组成、工作原理和连接过程,理解网络通信中的常见协议(如 TCP/IP、HTTP等),学习如何使用行空板与网络服务进行交互,包括发送 HTTP 请求、接收服务器响应以及解析 JSON 格式的网络数据等内容,培养学生在网络环境下的程序开发与数据处理能力,为后续深入学习物联网应用打下基础。 5. 数据处理与格式转换:学会对从时间服务器和天气 API 获取的原始数据进行处理和转换,涉及数据的筛选、清洗、解析、格式化等操作,如将 JSON 格式的天气数据提取出温度、湿度等关键信息,将网络时间转换为便于显示和操作的本地时间格式等,使学生能够熟练地运用数据处理技巧,为实现项目的各种功能提供准确可靠的数据支持。 五、项目实现 1. 硬件搭建:将绑扎气球用的塑料管切割、拼接成数码时钟的主框架,确保框架结构稳固,能够支撑舵机和行空板等部件。将 7 个 9g 舵机按照仿数码管的排列方式固定在主框架上,通过扩展板连接至行空板 K10 的舵机驱动接口,保证每个舵机与行空板之间的电气连接畅通。同时,将红色纸板根据需要裁剪成合适的形状与大小,贴在舵机的重要显示部位,增强数字显示的视觉效果和美观度。 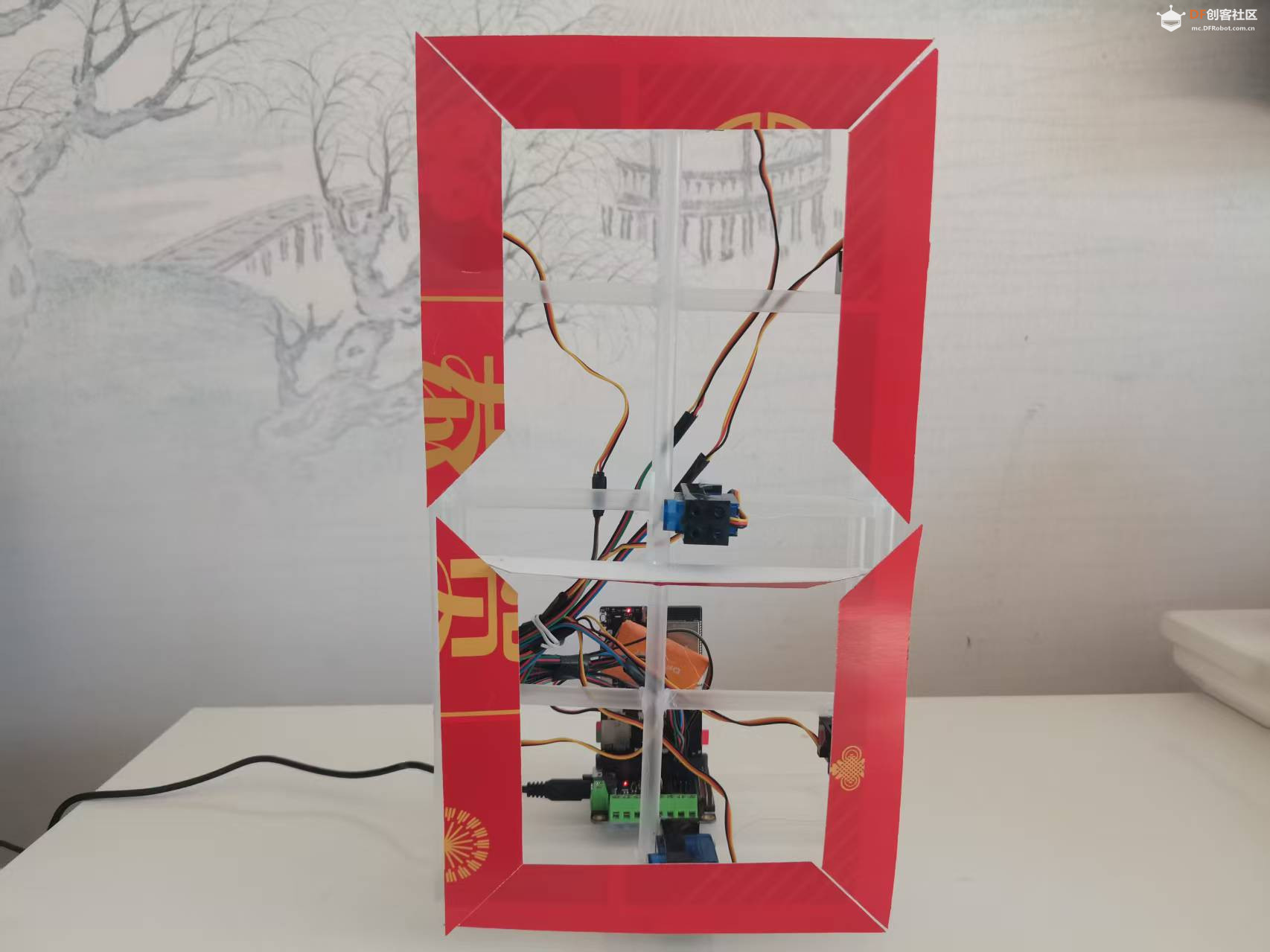 2. 软件编程:基于行空板 K10 的编程环境,利用 Arduino 语言编写程序。程序需包含舵机驱动、语音识别、Wi - Fi连接、时间服务器访问、天气 API 数据获取与处理等功能模块。其中,舵机驱动模块负责控制各个舵机的动作,实现数字的显示;语音识别模块负责接收用户的语音指令,并触发相应的功能;Wi - Fi 连接模块用于实现网络连接,保障时间服务器和天气 API 数据的获取;时间服务器访问模块则负责定期获取精准的网络时间;天气 API 数据获取与处理模块用于从网络上获取天气数据,并将其转换为适当的格式进行显示。编程过程中,应注重代码的优化与注释,提高程序的可读性和可维护性。 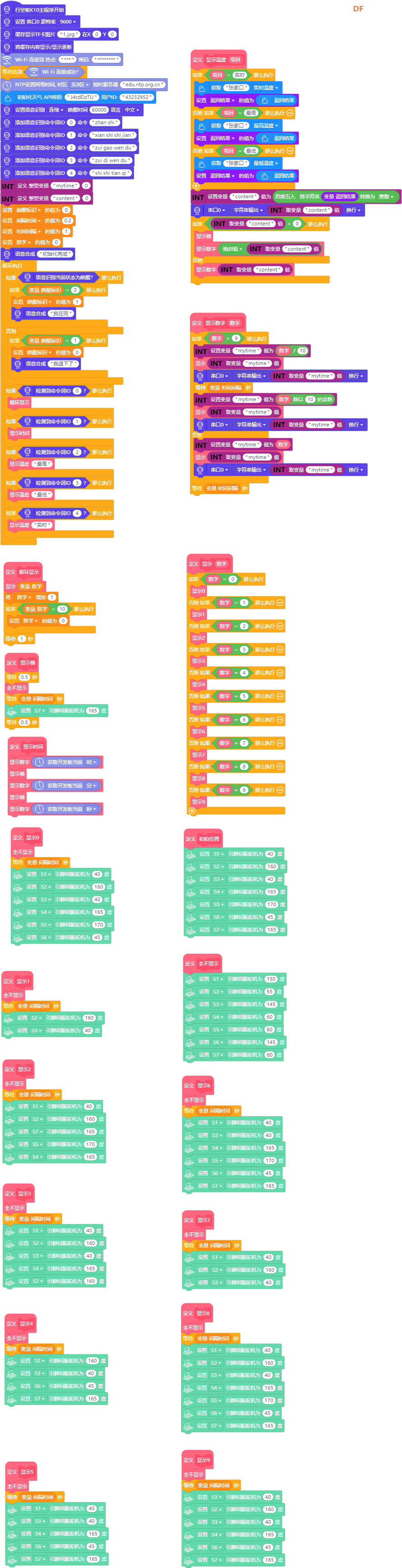 3. 测试与调试:在硬件搭建和软件编程完成后,对行空数码时钟进行全面的测试与调试。首先,测试舵机的控制功能,检查每个舵机是否能按照预设的角度准确动作,确保数字的显示正确无误。接着,测试语音识别功能,验证其是否能准确识别用户的语音指令,并触发相应的功能。然后,测试 Wi - Fi 连接和网络数据获取功能,确认能够成功连接网络,准确获取时间服务器和天气 API 的数据。在测试过程中,如遇问题,应仔细排查原因,进行针对性的调试与修正,直至所有功能均能正常、稳定运行。 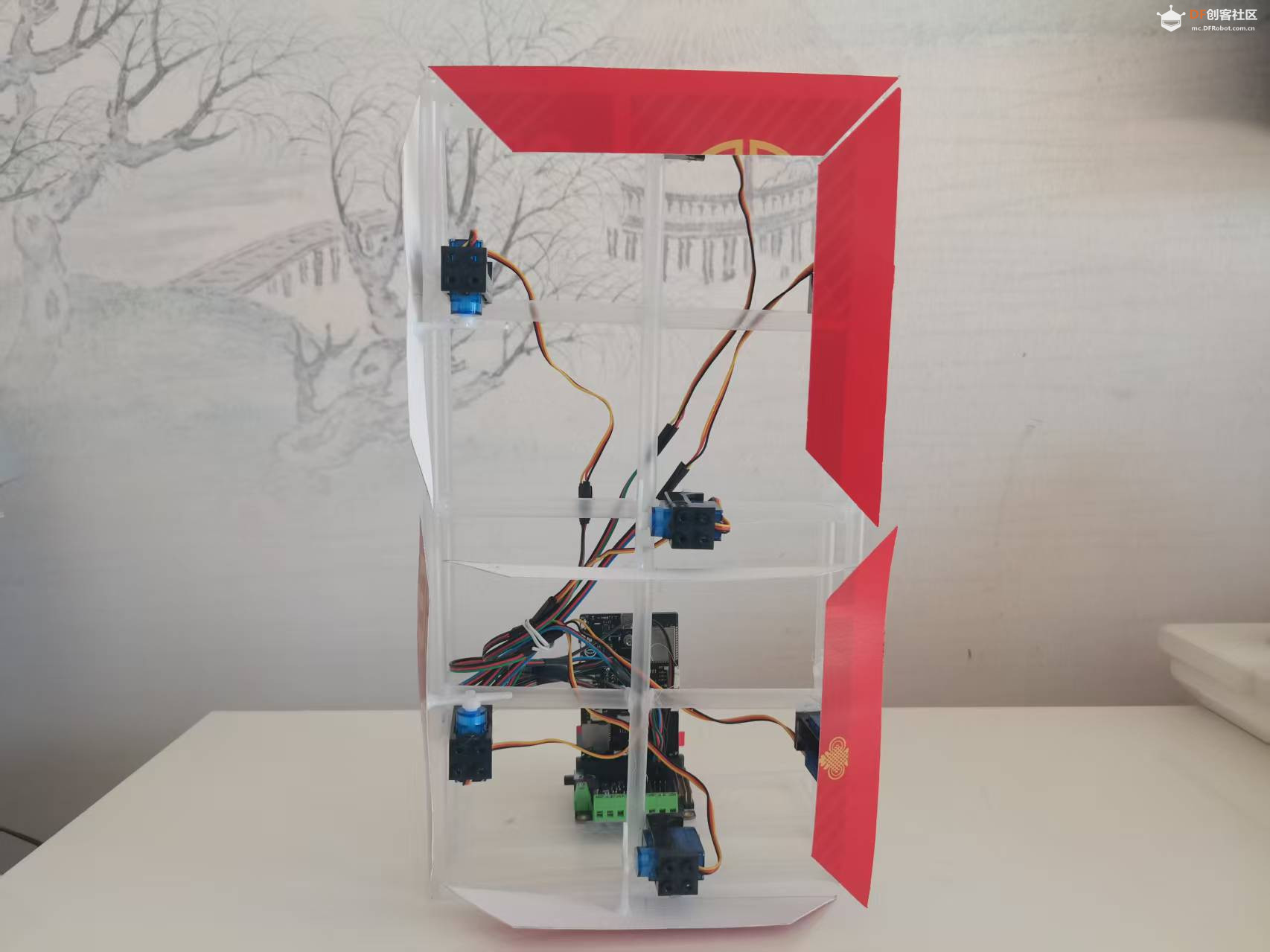 六、项目拓展 1. 天气信息扩展:除了当前的实时气温、最高气温和最低气温等基本天气信息展示外,可以进一步拓展项目的功能,增加如风向、风力、空气质量指数(AQI)等更丰富的天气信息显示。只需根据相应的天气 API 提供的数据格式,对程序进行适当修改与扩展,即可全面展示更详尽的气候状况,满足用户对天气信息多样化的需求。 2. 语音指令丰富:针对语音识别模块,进一步丰富和完善语音指令集,增加更多的功能指令和查询选项。例如,可以实现用户通过语音指令查询特定日期的天气信息、设置闹钟提醒、获取日历事件提醒等,显著提升行空数码时钟的智能化程度和实用性,让用户享受更加便捷高效的生活体验。 3. 外观个性化设计:鼓励学生充分发挥创意,对时钟的外观进行个性化设计与装饰,使其更具艺术感和观赏性。可以采用不同的材料、颜色和造型进行搭配与组合,例如使用激光切割、3D打印框架、彩绘塑料管、添加装饰性图案、悬挂装饰挂件等,打造独一无二、个性鲜明的数码时钟作品,彰显学生的创造力和审美品味。 七、附件下载 1.因Mind+中的天气扩展插件使用时出现无法获取数据,编写了一个”天气“扩展:  yuntian-weather-thirdex.rar yuntian-weather-thirdex.rar2.因本项目中在数码管上显示数字时,程序中需要使用“整型”数据,而Mind+中的只有浮点型变量,编写了“整形变量“扩展插件: yuntian-define_int-thirdex.rar3.程序图形化编程源码: 行空数码管.zip八、演示视频 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






