|
1977| 13
|
[项目] 【Arduino 动手做】构建全方位声纳矩阵 让机器人感知环境 |
|
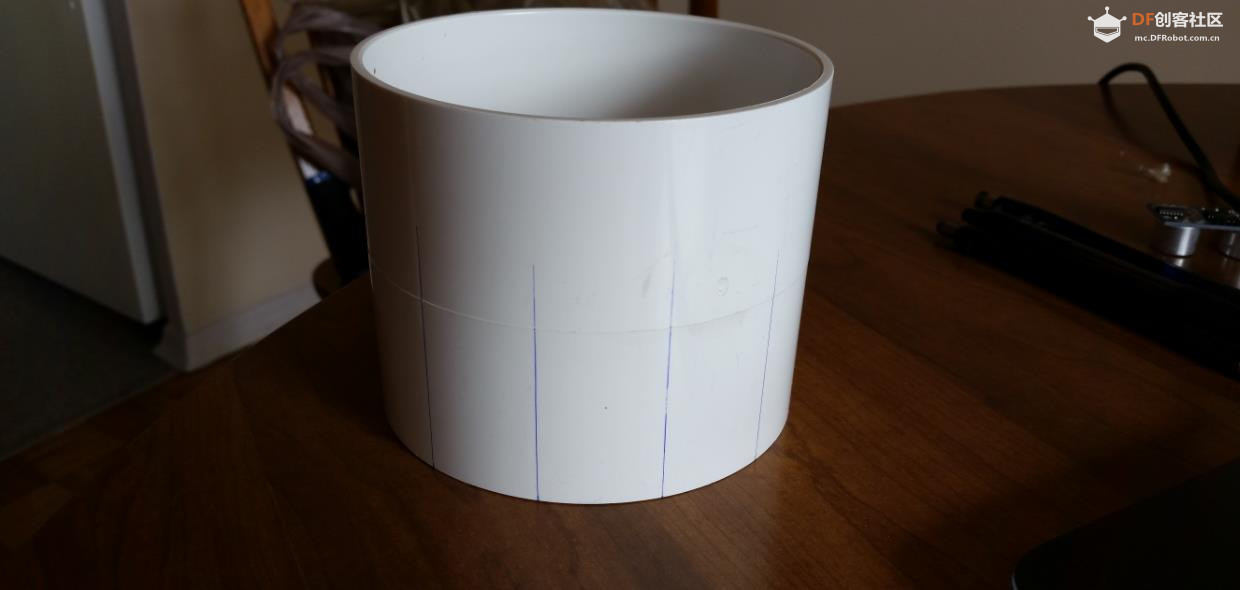
第 3 步:画出标记超声波测距仪孔的线条 您需要画 4 条线,分别用于 Emiter 和 Receiver Clinder,另外两条用于 Oscilator。 我在声纳传感器下方和上方放置了 5 毫米的自由线。我们将使用该空间来放置底部和顶部盖(当然,如果你想要它们) 更具体地说,这是四行中每一行的详细信息: 1.底部填充器:从底部开始,第一行应在 XX mm.2 处。顶部压片机:在 XX 毫米处画第二条线,也是从底部开始。 3. 摆动器底部:在距底部 XX mm 处画一条新线 4.振荡器顶部:在距底部 XX 毫米处画这条线现在,cilinder 已经完成了我们需要钻孔的所有点。 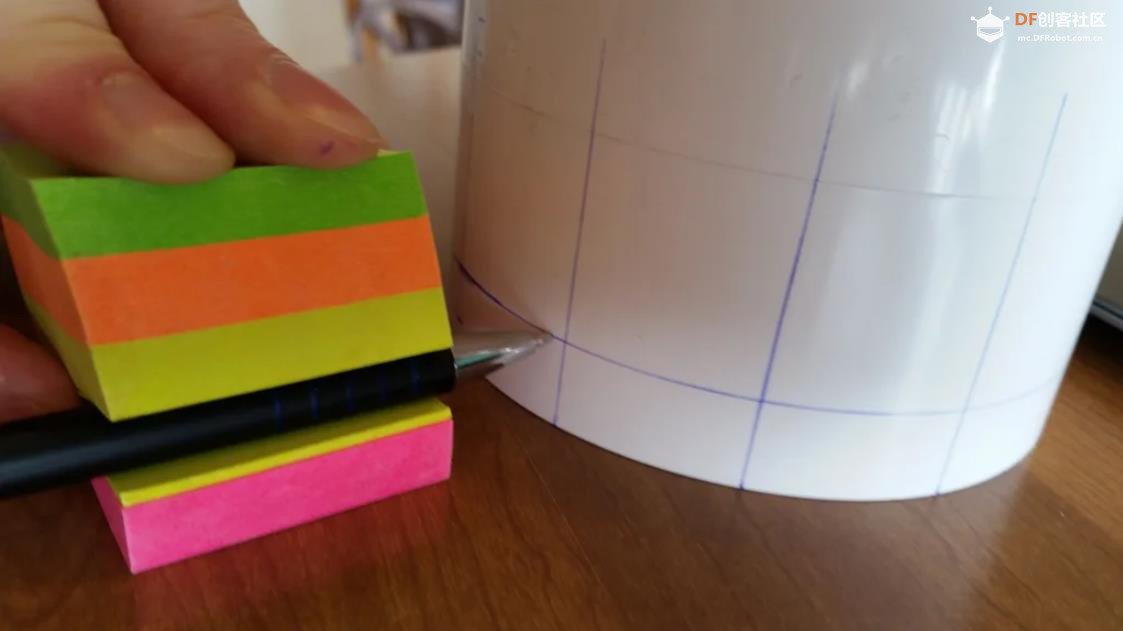 |
|
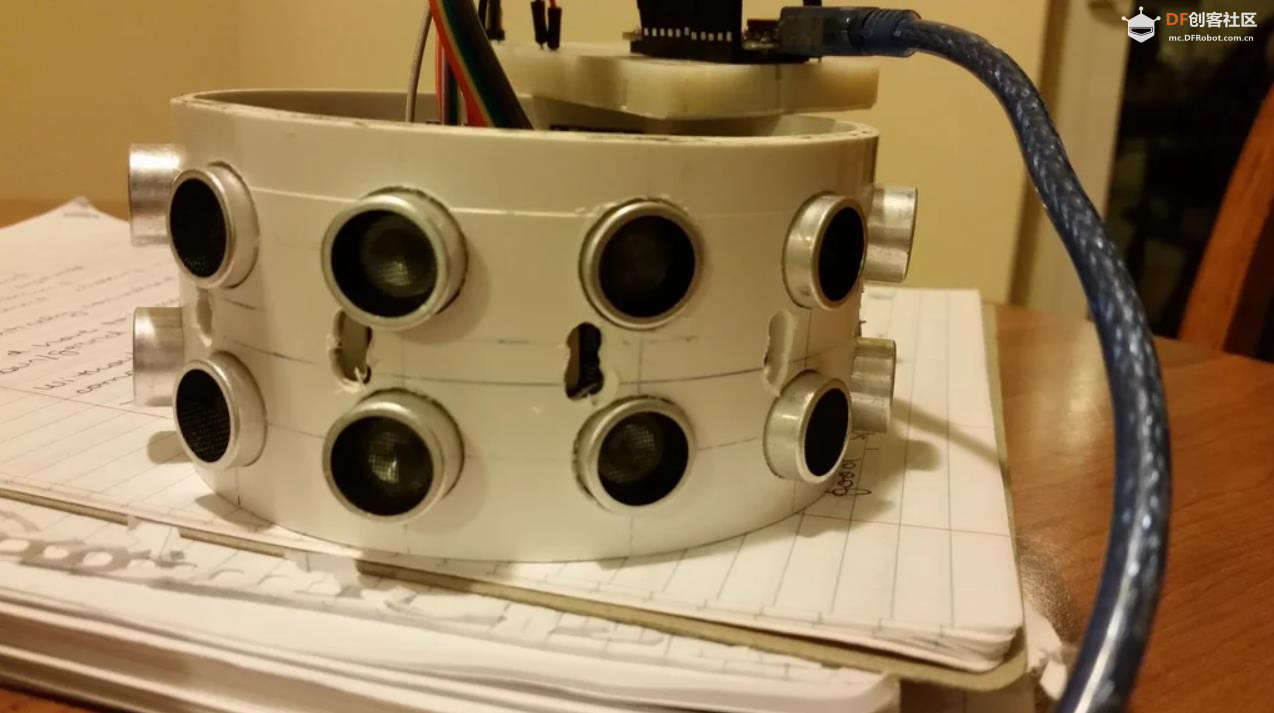
第 4 步:开始钻孔 现在我们将开始在放置超声波测距仪的位置打所有孔。 使用上一步中绘制的标记检查每个孔的制作位置。请记住,如果您先打一个小孔,您将对它的位置有更多的控制权。之后,您可以使用正确的位。 我提出的另一个建议是只为一个传感器打孔,测试它是否正确安装,如果合适,则转到下一组孔。如果你一起做所有事情,你犯了错误,你将无法解决它。 从 las 图像中可以看出,两个振荡器孔应该连接在一起。 确保所有测距仪都正确安装在预期位置。如果情况并非如此(一开始我不是这样),请纠正孔,这样您就知道一切都会适合。 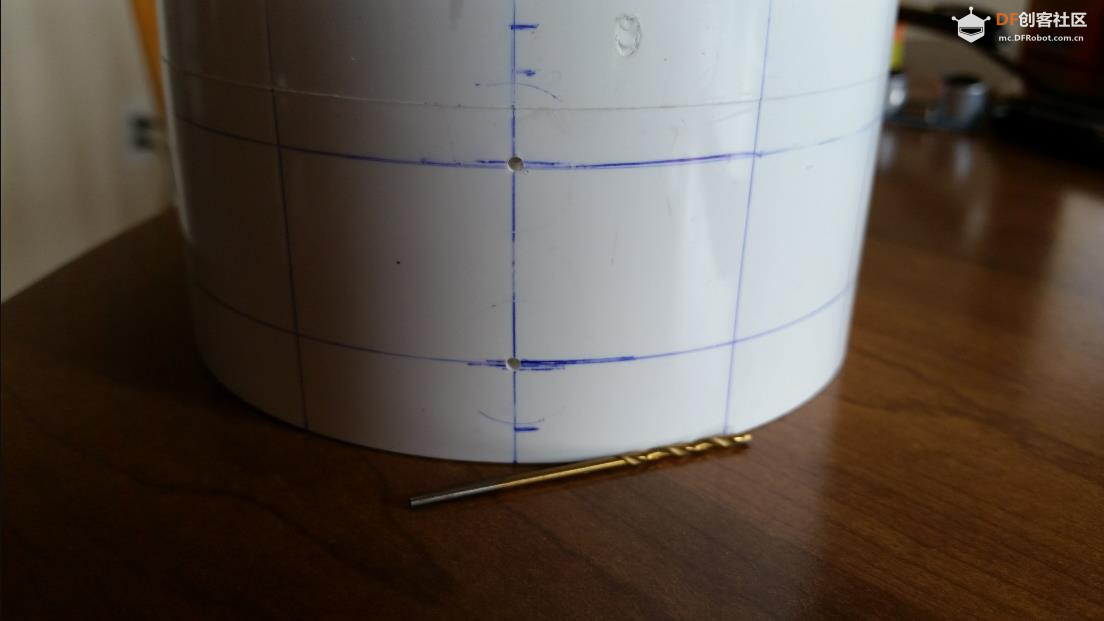    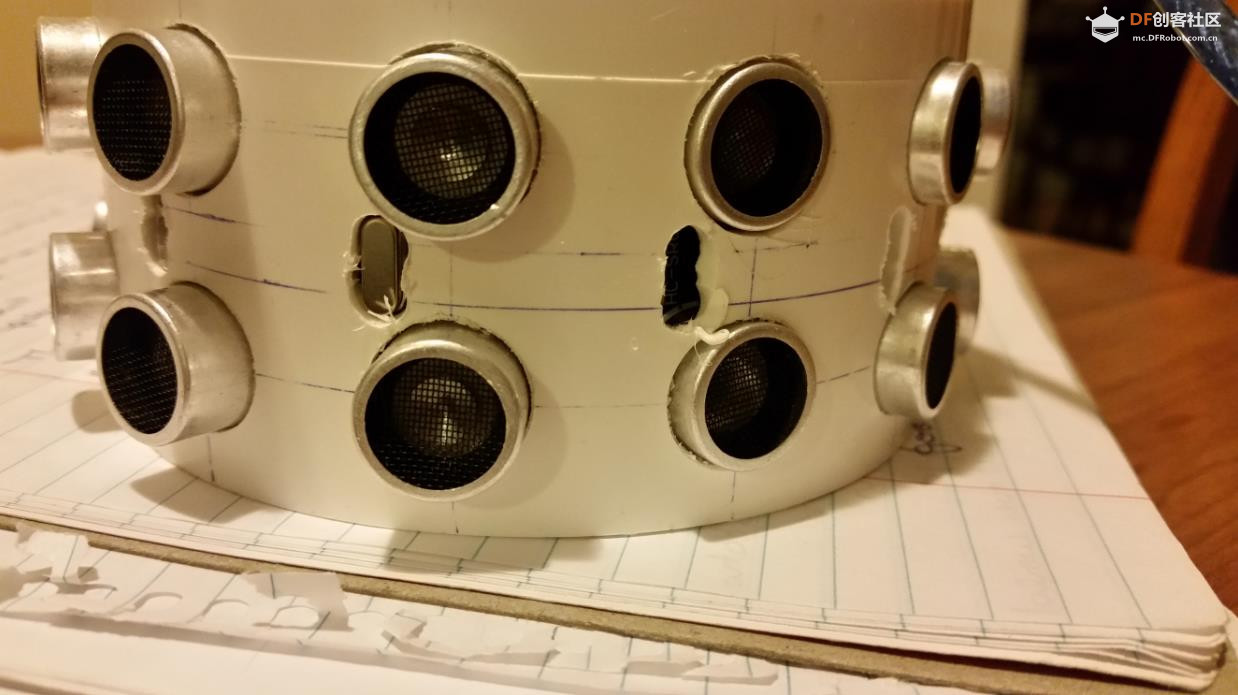 |
|
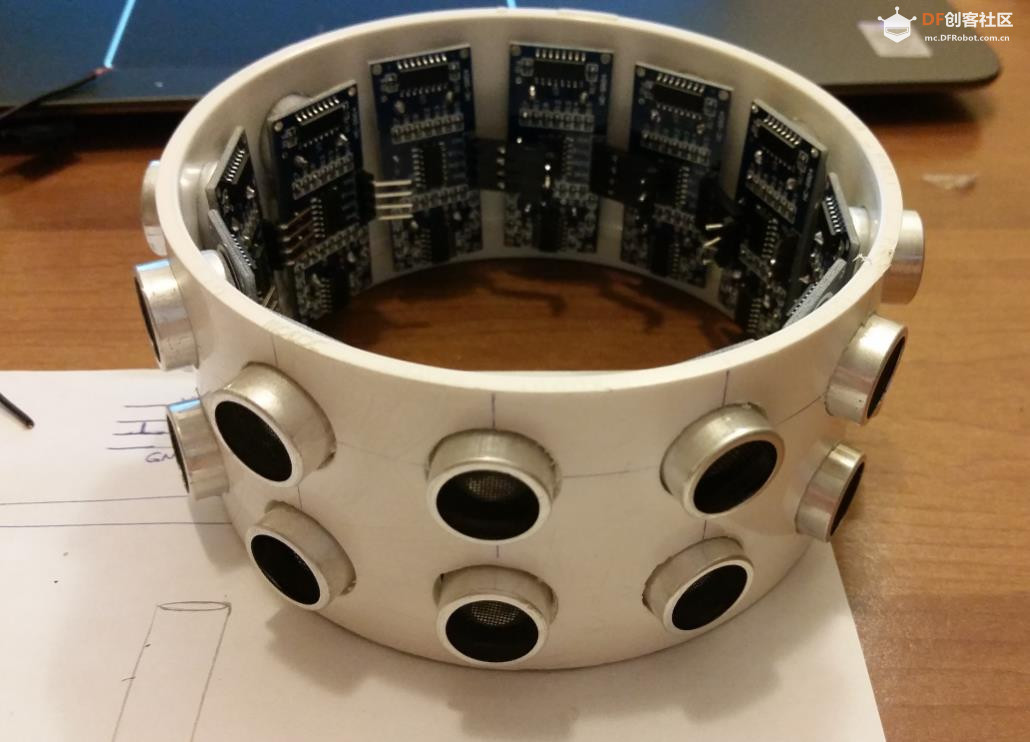
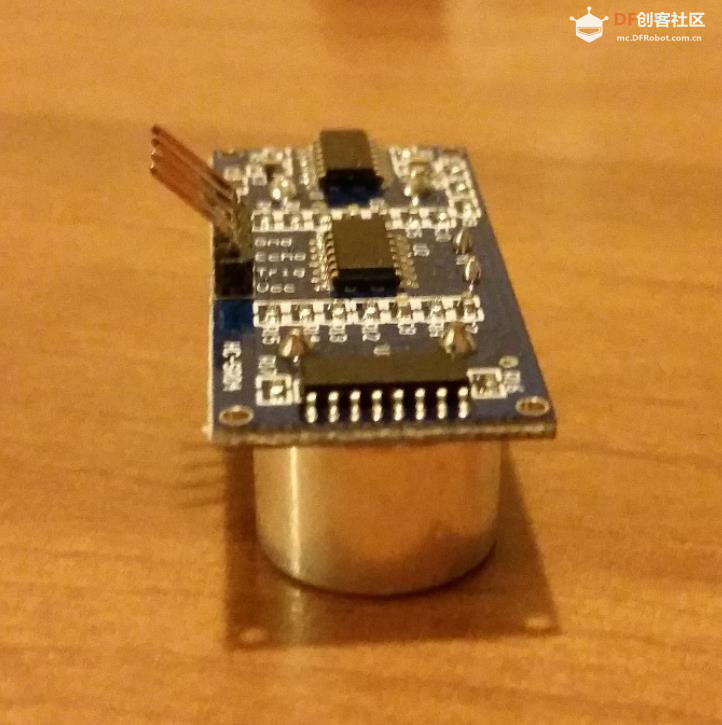
第 5 步:创建电缆以连接所有传感器 如果您以前使用过超声波测距仪,那么您已经知道它们(至少)有 4 个引脚 • Vcc • GND • Trig • Echo 因此,由于我们将使用 12 个声纳,因此我们谈论的是 Trig 和 Echo 的 24 个引脚。Arduino Nano 没有 24 个数字引脚可供使用。好吧,我们要做的是将 Trig 和 Echo 引脚连接在一起,这样我们每个传感器就可以只使用一个信号引脚。(这不是我的想法,它是您可以在我在代码中使用的 NewPing 库中找到的示例的一部分。 思考是..你将不得不焊接一大堆连接.. 正如您在图像中看到的,所有 Vcc 都连接在一起。所有 GND pins的运行相同。 其余电缆连接到每个传感器上 Trig/Echo 的 12 个引脚。 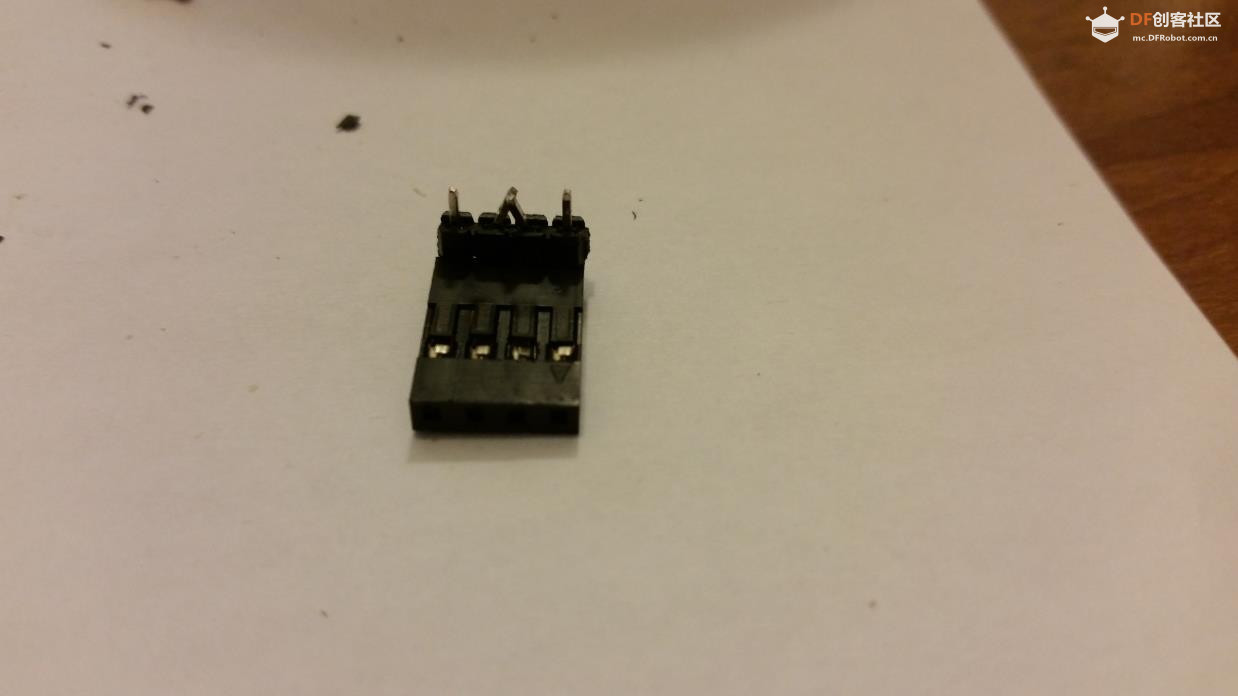 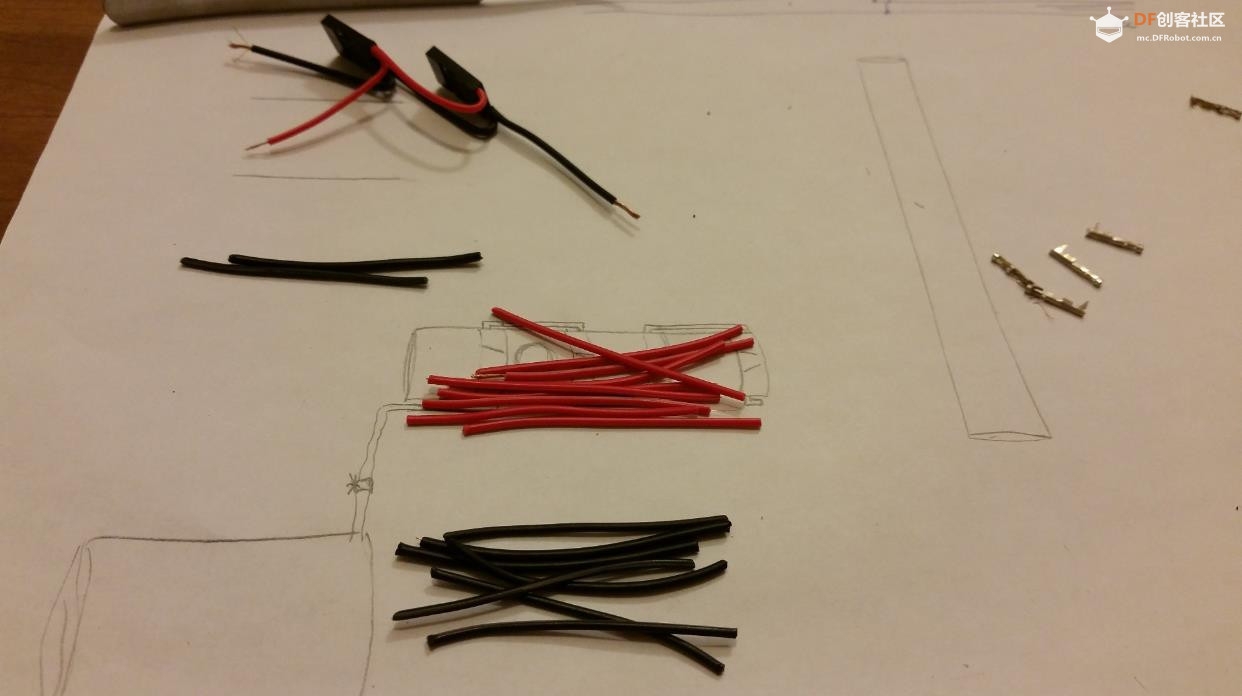 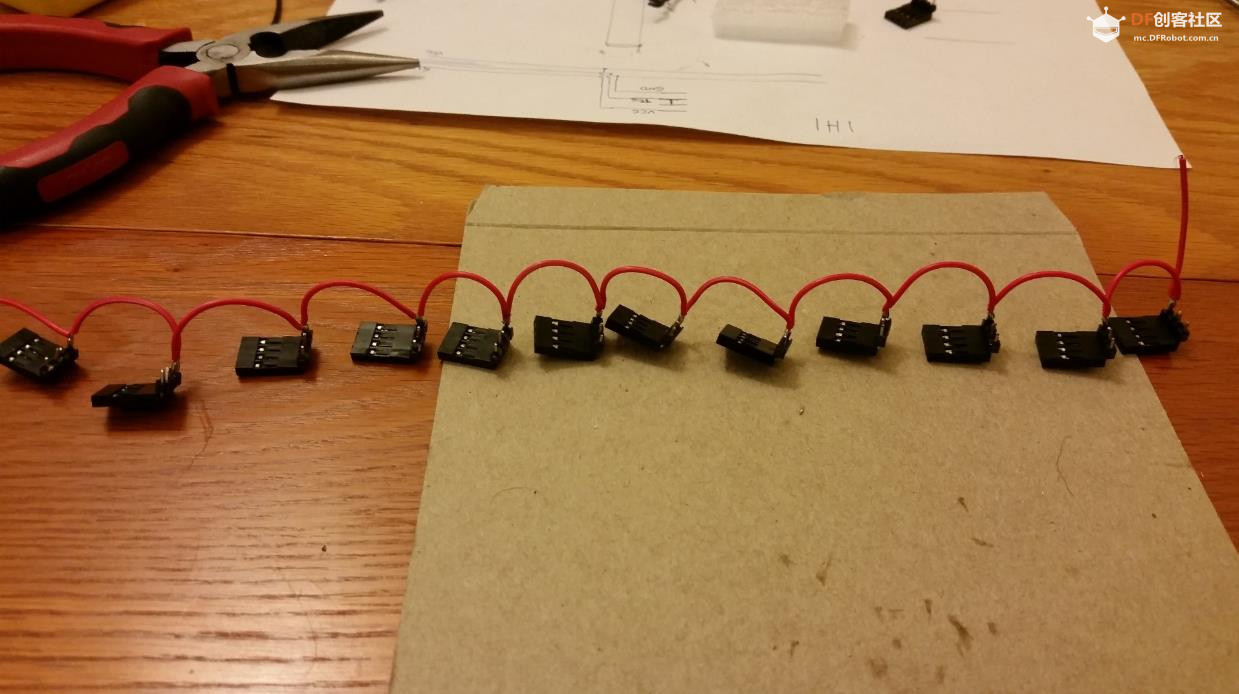 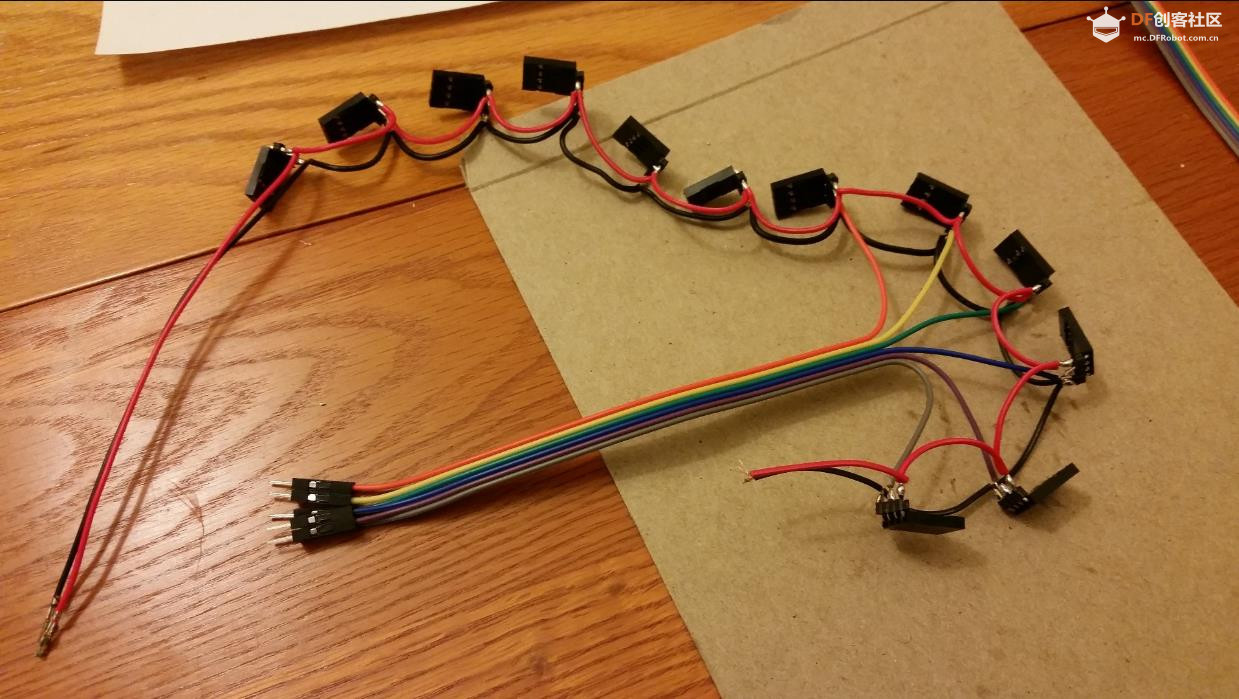 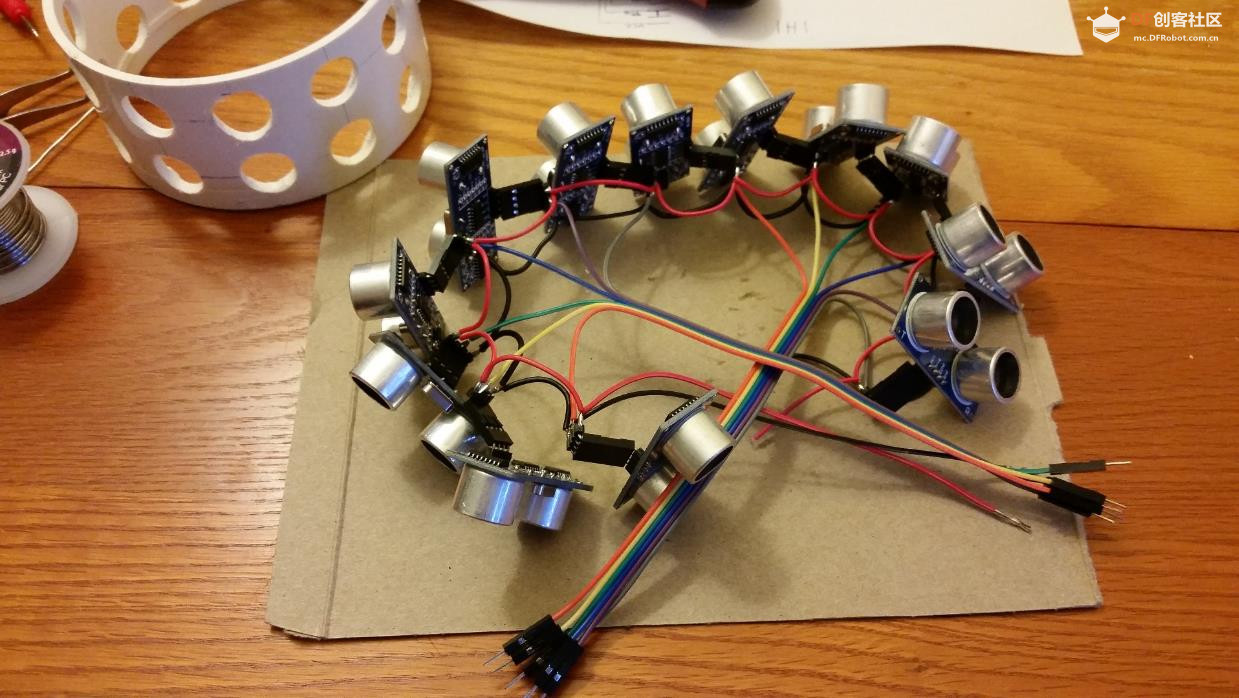 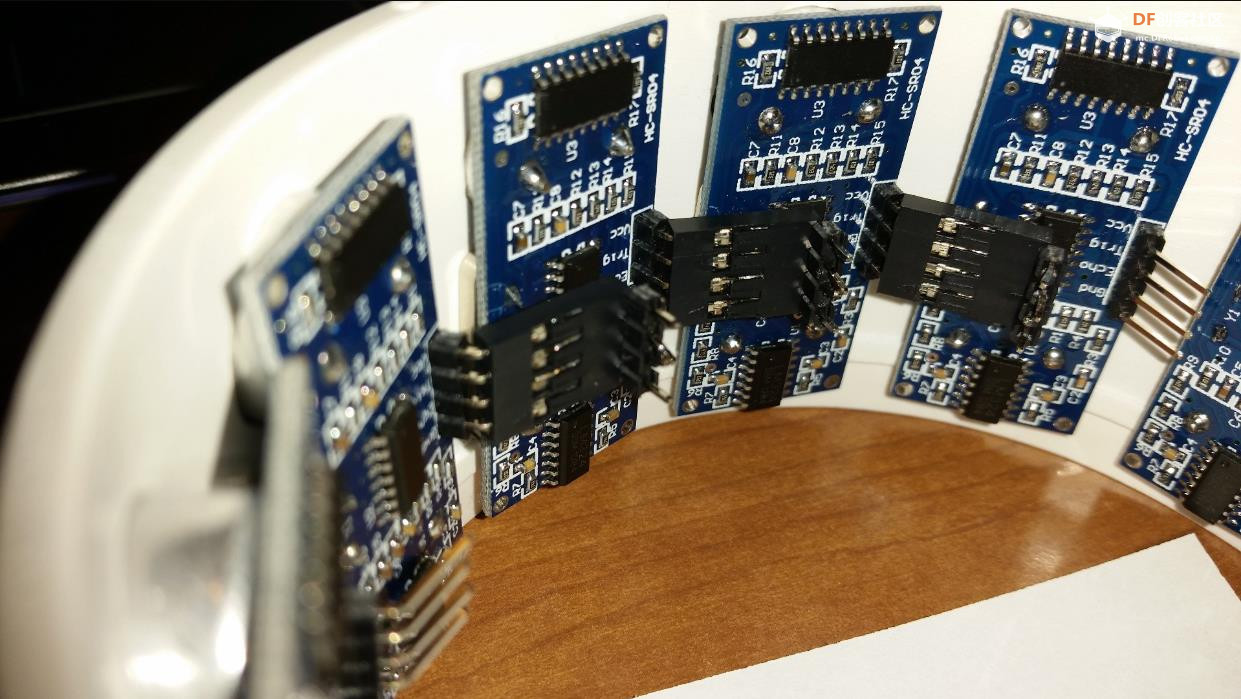 |
|
第 7 步:将您的 Sketch 安装到 Arduino 中 |
|
本帖最后由 驴友花雕 于 2025-6-6 18:03 编辑 附录 【Arduino 动手做】构建全方位声纳矩阵 让机器人感知环境 项目链接:https://www.instructables.com/member/_now_/ 项目作者:加拿大多伦多 (我是男朋友、父亲、软件开发人员和创客,在阿根廷长大,目前住在加拿大多伦多。) 项目视频(只有类似参考演示):https://www.youtube.com/watch?v=SvLObGL-5ZY 项目代码:https://bitbucket.org/nahueltaibo/andar/src/wheelsWorking/ 3D打印文件:无需打印  |
本帖最后由 驴友花雕 于 2025-5-25 17:05 编辑 帅猫 发表于 2025-5-25 11:15 谢谢鼓励。几年前,从一个干簧管模块开始,我便投入大量时间深入实验,探索各种传感器、执行器、开发板及套件…… 涉及的硬件种类已接近三百,始终保持着严谨的尝试和动手实践。其中最极限的挑战之一,当属 1.28 英寸 GC9A01 圆形屏幕模块,我成功完成了 153 项小实验,并悉心记录下全过程,在博客上分享。这算不算认真?你说了算! 在 CSDN 上,我打造了栏目 《189 种传感器执行器系列开源实验》(189种传感器执行器系列开源实验_驴友花雕的博客-CSDN博客),已累计发布近 1400 篇实验项目博客。至今,Arduino 基础实验项目已坚持六年,不断深耕与优化。 而就在一周前,我开启了翻译、分享与引入国外开源项目的新探索,开始系统性介绍那些富有特色的国际创客作品。我一直欣赏国外创客脑洞大开的创新精神,更敬佩他们 坚持不懈的动手能力。但学习他人经验与自主创新并非对立,而是相辅相成——敢于借鉴先进经验,也是一种成长。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






