|
2305| 17
|
[项目] 【Arduino 动手做】GoodBoy - 3D 打印 Arduino 机器狗 |
|
本教程详细介绍了如何使用 3D 打印部件制作一个小型四足机器人。它设计紧凑、简单且成本低廉。该项目使用 Arduino Uno 作为微控制器。在本教程中,您将找到完整的 3D 模型文件、Arduino 程序以及复制(并希望改进)该项目所需的说明! 几年来,我一直想做一个四足机器人,这很大程度上受到了波士顿动力公司那些非凡机器人(尤其是“Spot”)的启发。疫情期间,我很幸运能有一些空闲时间。不到四周前,一位朋友告诉我有个3D打印大赛,我觉得这是一个很好的机会,可以尝试自己设计一只机器狗! 希望你喜欢这篇教程,也期待看到你的评论,甚至希望看到其他人也尝试自己动手搭建。谢谢。 请注意: 遵循本说明时需谨慎。使用 3D 打印机、烙铁、美工刀/手术刀、强力胶以及电池短路引起的火灾都存在一定风险。不过,本项目不会使用危险电压,也无需任何电气经验。 本教程将向您介绍如何构建一个与我之前构建的完全相同的机器人,但请参阅倒数第二步“潜在改进”,了解我事后看来可能做得更好/不同的地方。我想构建第二个机器人,并融入这些改进,但如果您愿意,也可以将这些改进融入到您的第一个机器人中。 另请注意: 我们不能指望 GoodBoy 机器人会在被叫到时前来。 GoodBoy 机器人尚未与猫、松鼠或兔子一起进行测试。 GoodBoy 机器人不易感染蜱虫、虱子等,但主人应注意不要让狗受到代码漏洞的感染。 如果您的真狗因即将来临的技术冗余而感到害怕,本说明书的作者不承担任何责任。 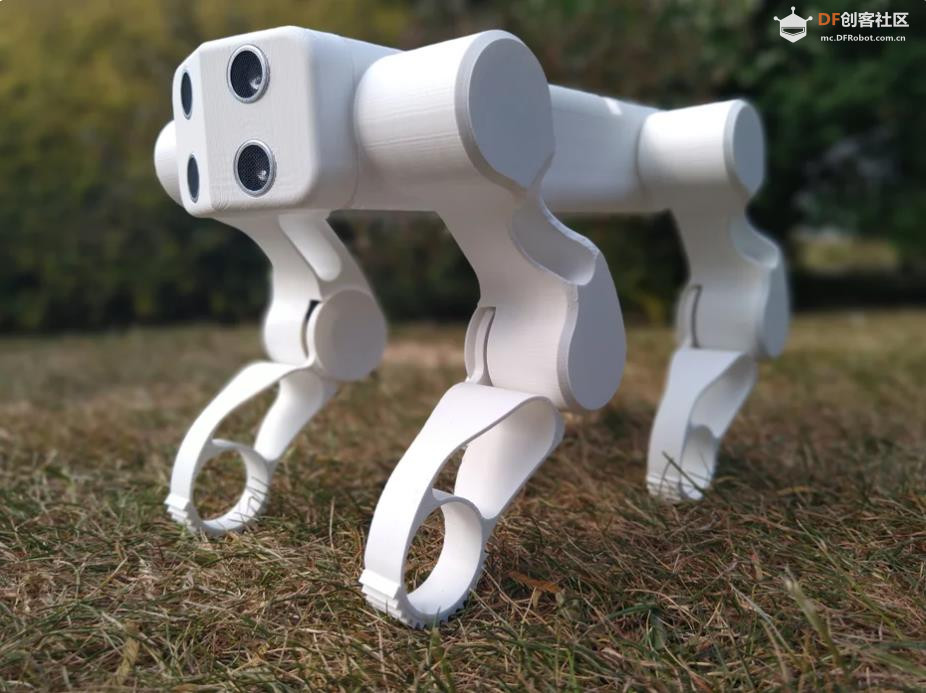 |
|
本帖最后由 驴友花雕 于 2025-6-1 06:26 编辑 ## 步骤1:本教程中使用的3D打印技术 本教程中使用的 3D 打印技术 您需要使用几种独特的技术来为自己制作这个机器人,对我来说,这是我第一次尝试其中的一些技术,所以这是一组有趣的印刷品! 嵌入式电缆 -机器人的腿部各使用两个伺服电机,一个位于膝盖,一个位于肩部。我希望通过这种设计将所有电缆隐藏起来,所以在“大腿”部分,我决定尝试将伺服电缆嵌入大腿打印件内。部件内隐藏着一个小通道,刚好够电缆穿过。在打印的适当位置,我暂停打印机,将电缆穿过通道,然后继续打印。几分钟后,通道被覆盖,伺服电缆现在隐藏在部件内。 Meshmixer 高级支撑,适用于复杂的悬垂结构 -这款软件使用起来略有技巧,但对于为难以处理悬垂的部件创建“树”状支撑非常有用。我们将在本次构建中多次使用它。 摩擦配合部件 -本次模型中的许多部件均未采用胶水粘合,而是依靠打印部件之间的紧密摩擦配合。我们将使用这种技术将电子设备紧密牢固地安装在机体内,同时允许在需要时拆卸它们。 集成六角螺母,用于螺栓固定 -机壳盖板包裹整个电子元件舱,并用 8 个 M2.5 螺栓固定。这些螺母采用推入式安装,嵌入机壳的六角形孔洞中,并用强力胶固定。  |
|
## 第二步:你需要什么 1、主要组件: Arduino Uno(正品或仿品) Adafruit Powerboost 1000C 18650锂离子电池 HC-SR04 传感器 x 2 9g 伺服器 x 8(Towerpro SG90 或类似产品) 光驱 x 1 2、次要成分: 5mm LED x 2(红色或其他颜色,您选择!) 条板(25 x 60mm) SPDT 滑动开关 接头引脚 连接线(窄规) 连接线(更宽,用于电池和电源线) 18650 电池座(推荐,非必需) 3k欧姆电阻x2 470欧姆电阻 x 1 M2.5 螺母 x 8 M2.5x8 螺栓 x 8 热缩管 电工胶带 3、工具和设备: 3D 打印机,打印床至少为 210 x 210mm - 请参阅下文了解 3D 打印机。 烙铁和焊料 强力胶 凡士林(用于润滑机器人腿部的印刷关节) 侧切刀(有用) 手术刀/工艺刀(对于修整印刷品等至关重要) 砂纸/锉刀(用于修整印刷品) Micro USB 充电器(我用的是 Raspberry Pi 充电器,手机充电器也可以) Arduino USB 线 用于编程机器人、准备打印等的 PC/笔记本电脑。 4、软件: 切片软件(我用的是Ultimaker Cura) Autodesk Meshmixer(用于高级支持生成) CAD 软件(如果您希望对 CAD 进行修改,我使用 Creo Parametric 的教育许可证。Tinkercad、Fusion 360、Autodesk Inventor 是其他 CAD 选项,请使用您觉得合适的任何软件!) Arduino IDE  |
|
## 步骤3:GoodBoy设计 上面的截图展示了我大约四周前创作的第一个概念。为了让它更小更轻,它很快就变成了现在的样子。我知道用便宜的9克伺服电机不会产生很大的扭矩,所以我尽可能地缩小了狗狗的设计。第一个设计看起来也有点凶残,如果你看过《黑镜》那一集,你就会明白我的意思…… 虽然我没有使用 Tinkercad 设计机器人,但我认为嵌入这个 3D 视图会很有趣,这样您就可以亲自检查最新的设计(请等待几秒钟加载,这是一个大文件!): 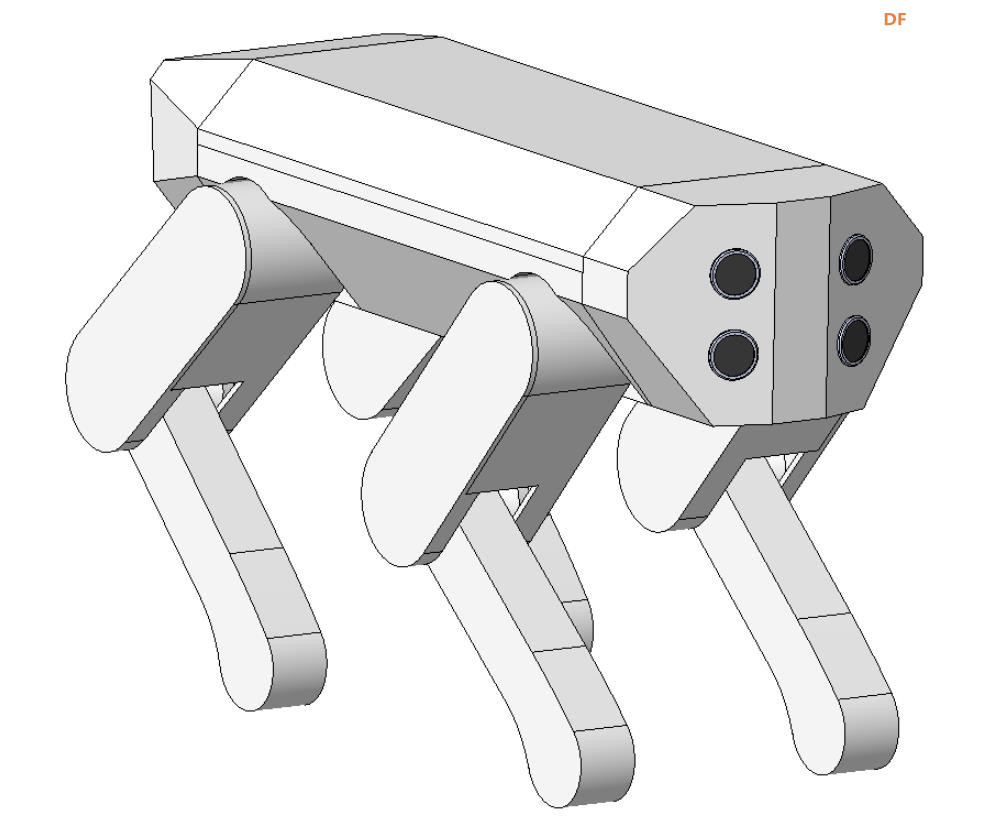 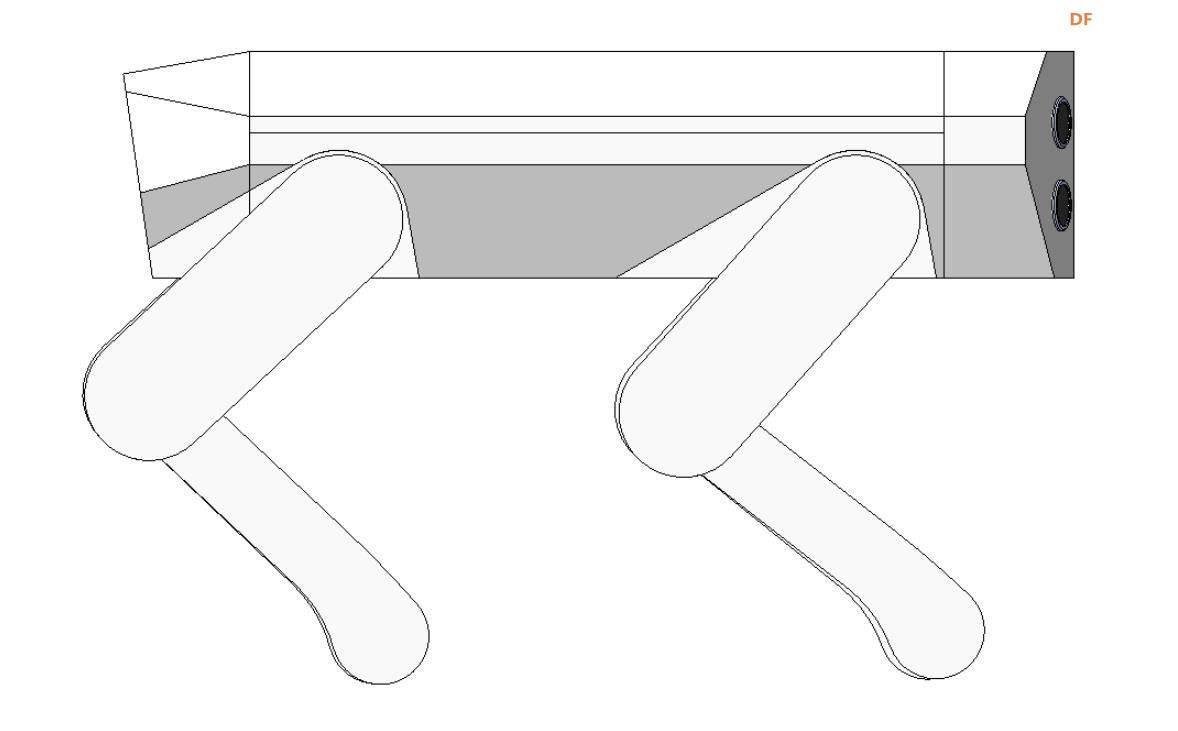 |
|
## 步骤4:GoodBoy CAD 完整的机器人 CAD 文件可以在我上传到 GrabCAD 社区库的地方找到。请点击此链接查看文件。我决定将组件上传为 .step 文件,以便可以导入到任何主流 CAD 软件中,希望尽可能多的人能够使用这些文件。在打印之前,您几乎肯定会希望对文件进行一些细微的修改(例如,调整机械配合以适应 3D 打印机的预期质量,或使其适合您购买的组件,尤其是伺服器)。 比赛结束后,我编辑了这个说明,并提到.stl文件也已上传到GrabCad库(见上方链接)。它包含一个包含所有文件的.zip文件夹,其中有一个自述文件,说明它还包含腕部打印的变体(用于加宽地面轨道的实验版本,我还没有尝试打印,不过你可能会发现它比纯V1设计有所改进)。 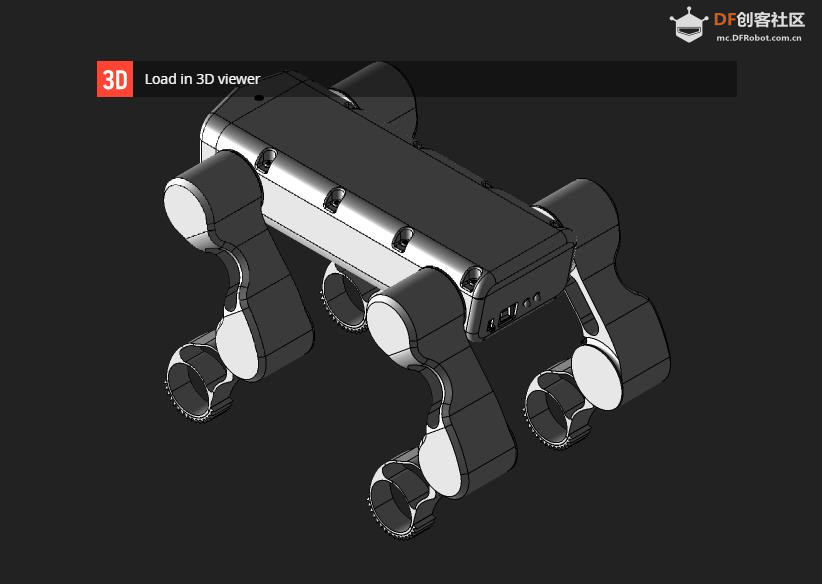 |
|
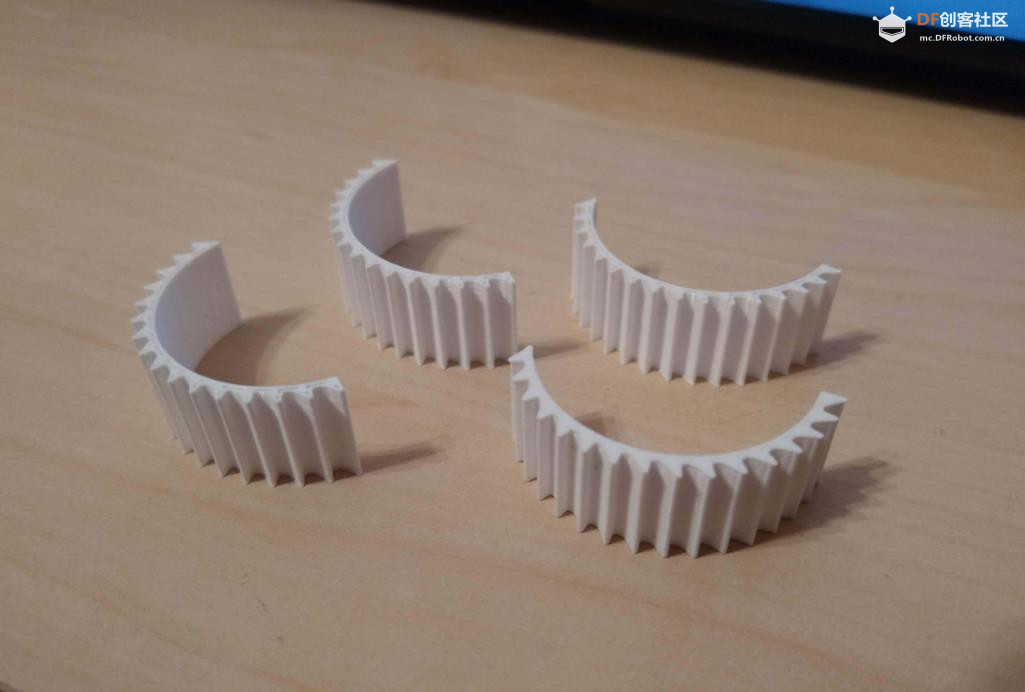
## 步骤5:3D打印提示和设置 网状混合器 前两张图片展示了 Meshmixer 类型的支撑,我在打印“大腿”和“手腕”部件时用到了它们,因为相比于普通类型的支撑,它们在这些复杂形状上效果更好。第三张图片展示了我在 Meshmixer 中创建这些支撑时使用的 Overhang 设置,我想向大家展示一下这些设置,因为设置太多,使用起来可能比较困难。 打开 Meshmixer 后,按“导入”,然后选择所需部件的 .stl 文件。然后从左侧任务栏中选择“编辑”,然后选择“变换”。使用此选项可更改文件的方向,然后按“接受”。然后选择“对齐”,再选择“接受”。这应该会自动将您的部件放置在打印床上。不用担心打印床可能与您的 3D 打印机不匹配,我认为 Makerbot Replicator 2 是默认设置,我们只需编辑 .stl 文件,然后再次导出,因此没有什么区别。现在从任务栏中选择“分析”,然后选择“悬垂”。在这里,更改设置以匹配我上面所示的设置。按 [1] 生成支持,如果满意,则按“完成”。现在您要做的就是“文件”和“导出”,然后选择保存新 .stl 文件的位置,该文件现在将包含这些支撑。接下来,您将把它导入您选择的切片软件(并记住在那里将支撑设置为“关闭”,否则它可能会尝试生成其他支撑来支持这些支撑!)。 Cura/您的切片机之选 我使用 Cura 创建打印文件,因为我最熟悉它,但无论你使用什么,它们都非常相似。我添加了一些用于所有 GoodBoy 部件的打印设置的截图,以便你查看。但根据你的 3D 打印机的质量,你或许可以打印得更好/更快——你自己最清楚!为了最大限度地提高质量,我打印所有部件的速度都很慢,并且使用了相对较小的层高。对质量最关键的部分当然是那些与腿部关节相关的部分——3D 打印部件用作轮毂和车轴,关键在于它们尽可能光滑且尺寸精确! 对于像腿部关节这样的部件,我打印了好几次,每次都会稍微调整一下接口部件之间的间隙或公差(在我的CAD软件中)。我需要进行一些实验,看看能达到的最紧密(但仍然能自由移动)的配合度,如果你愿意的话,你也可以这样做。  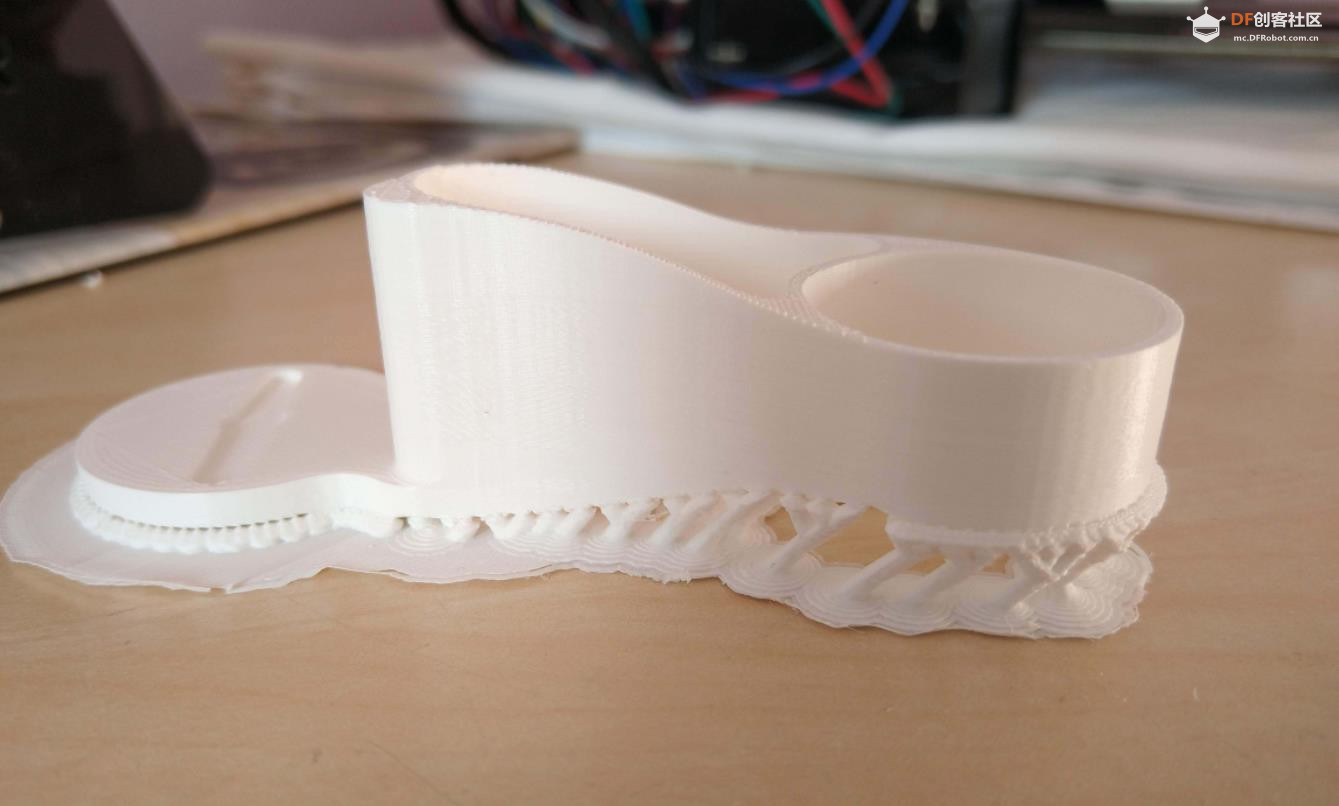 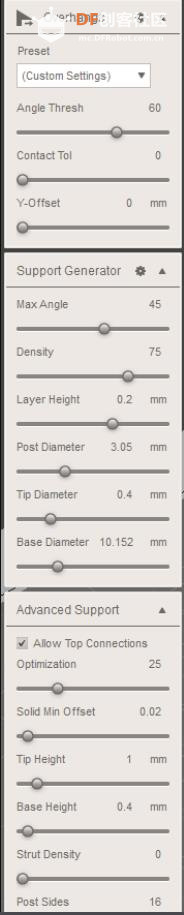 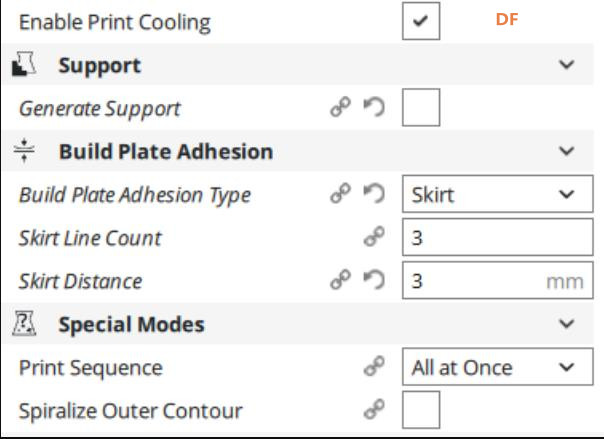 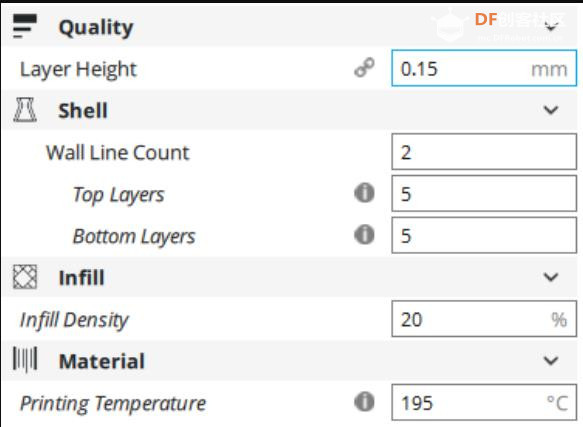 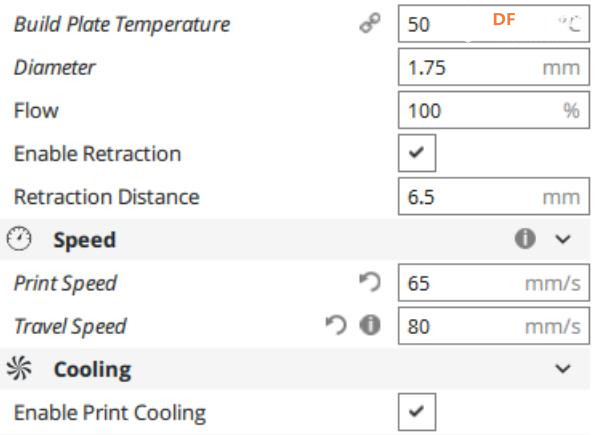 |
|
## 步骤6:腿部组装过程 抱歉图片太多!这个步骤比较难,所以我尽量用图片来说明。以下步骤与图片的顺序一致,请按顺序操作即可。 零件全部打印完毕并准备就绪。编写一个小程序,将每个伺服电机集中到90度位置。在粘合之前,务必将每个伺服电机集中到位,以免影响后续的运动。这个小轮状的部件是一个夹具,用于将伺服电机对准腿部关节区域的中心。伺服电机轴与外圆同心非常重要。这张图片展示了夹具如何紧密地嵌入腔体中,中心孔如何夹住伺服电机轴,使其正确定位。用强力胶将膝关节电机固定到位,并在胶水干透之前用这个夹具快速对准它们。 现在是时候用强力胶将肩部电机固定到位了。将伺服电机线缆穿过校准孔,然后在电机下方涂抹一些强力胶。使用校准夹具将伺服电机置于腔体的中心位置。在伺服电机干燥之前,用螺丝刀将伺服电机牢牢地按入到位,如图所示。 凡士林涂抹在手腕部分的表面,该部分将穿过膝盖套。这有助于保持其运转。在执行此步骤之前,我建议您快速地用手将这些部件拧在一起,这样可以消除它们之间的任何不协调,并使两个部件完美贴合。 添加了膝关节盖,并在其边缘处用强力胶粘住。 接下来安装肩部电机。首先将电线穿过夹具工具。 在电机下方涂上强力胶,并将夹具压入到位,同时将电机固定到位。 现在我们可以移除夹具,并为下一步做好准备。 首先将两根电机电缆穿过肩部轮毂部分内的孔。 将伺服喇叭推入电缆之间,并将其用强力胶粘在肩部轮毂部分下侧的腔体中。 接下来将肩角压到伺服电机轮毂上,无需将其粘合或拧紧到位。 和以前一样,在肩盖部分涂抹一些润滑油。 将盖子粘好,边缘用强力胶粘住。肩关节就完成了! 大功告成!只剩三条腿了——庆幸你造的不是机器蜈蚣!   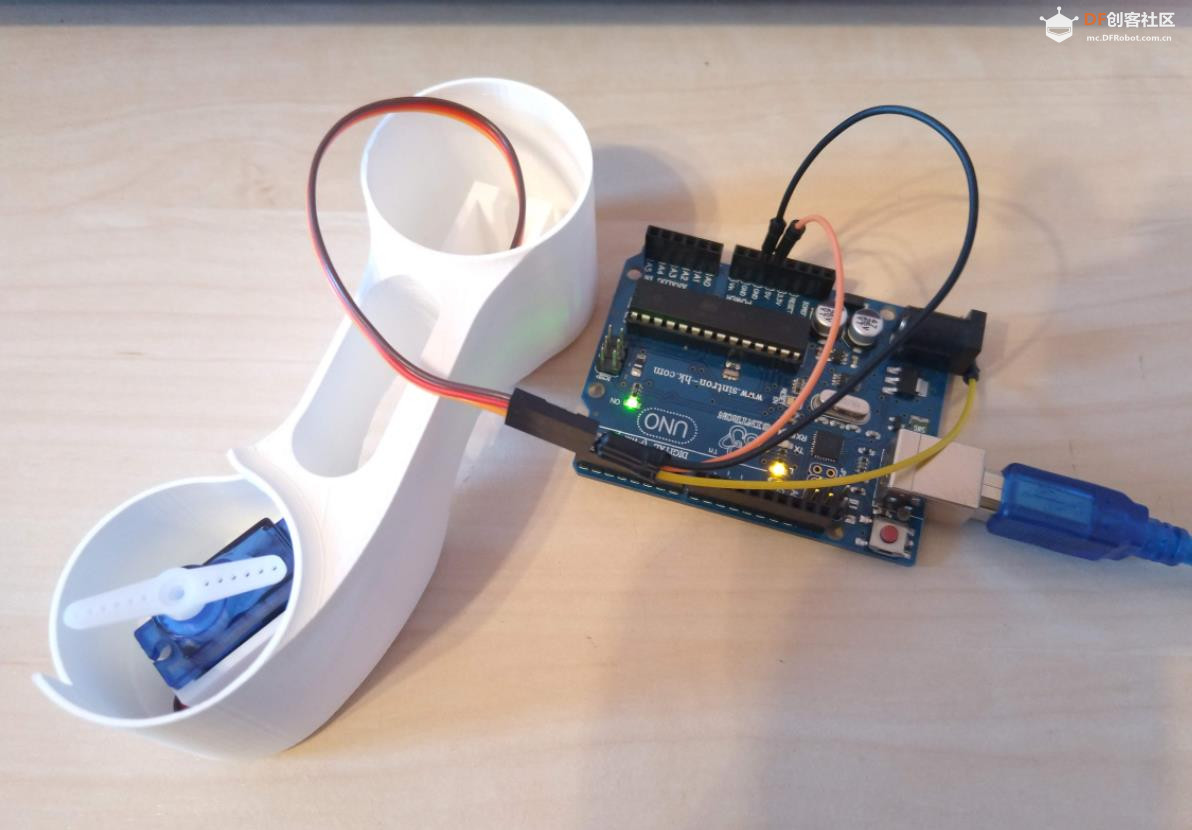    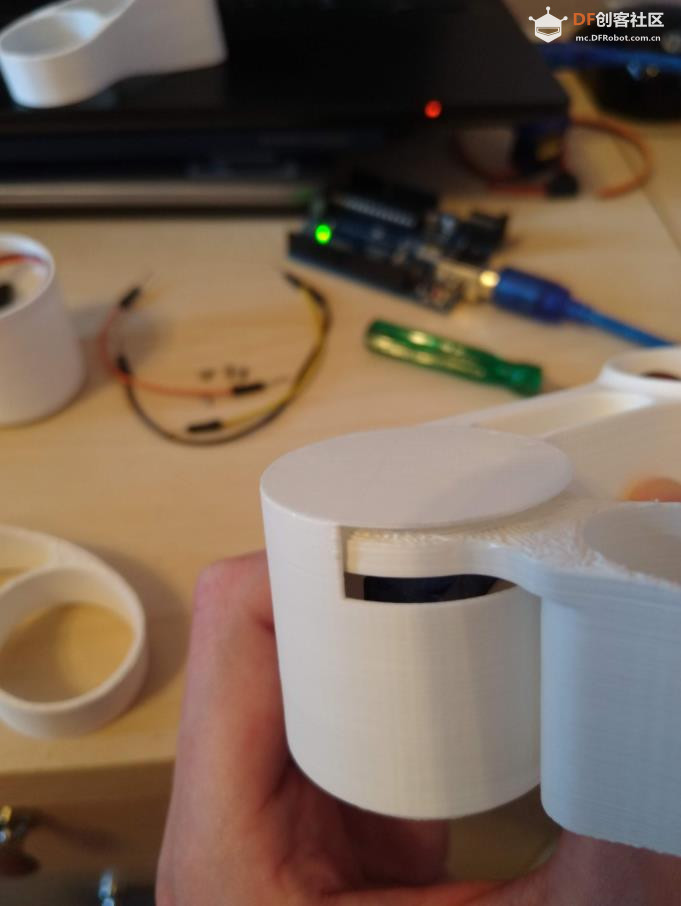  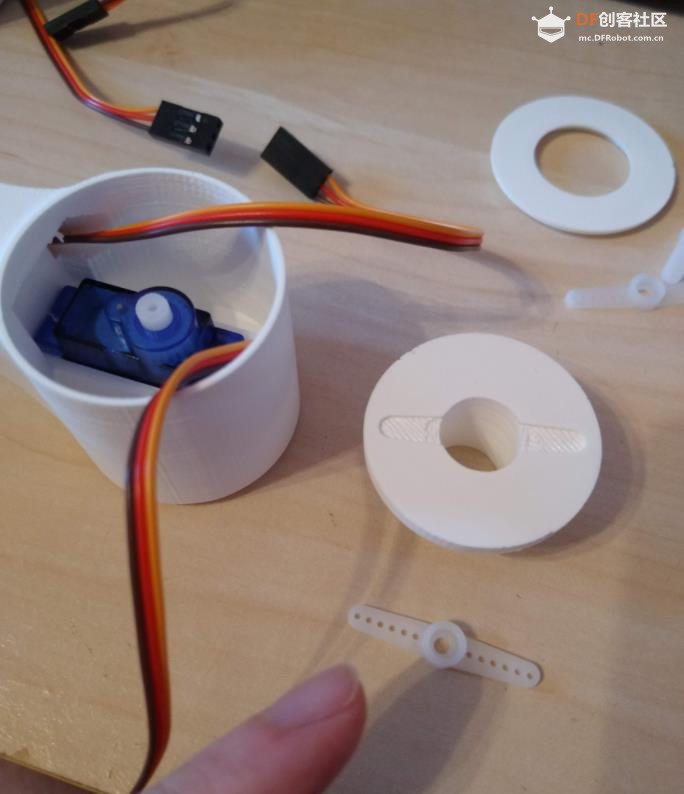 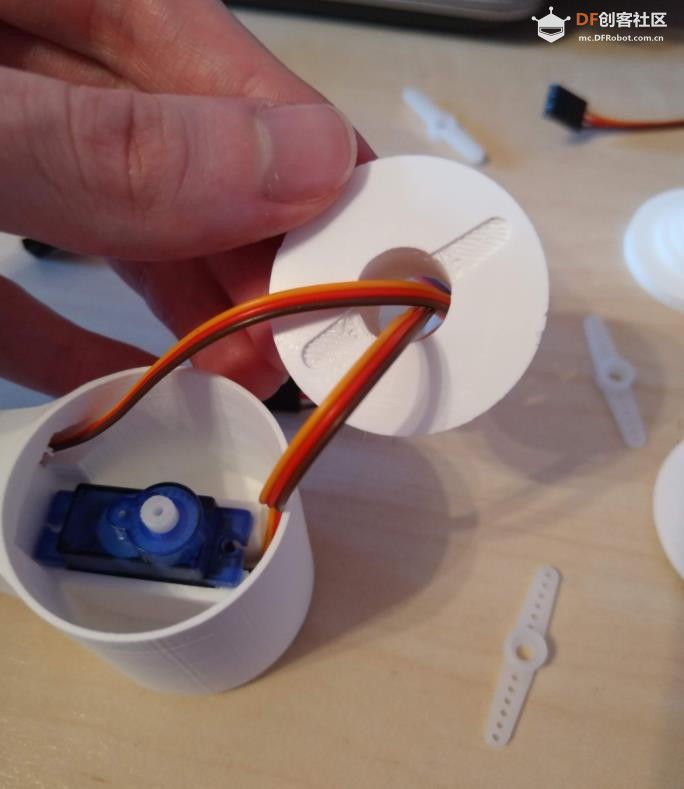    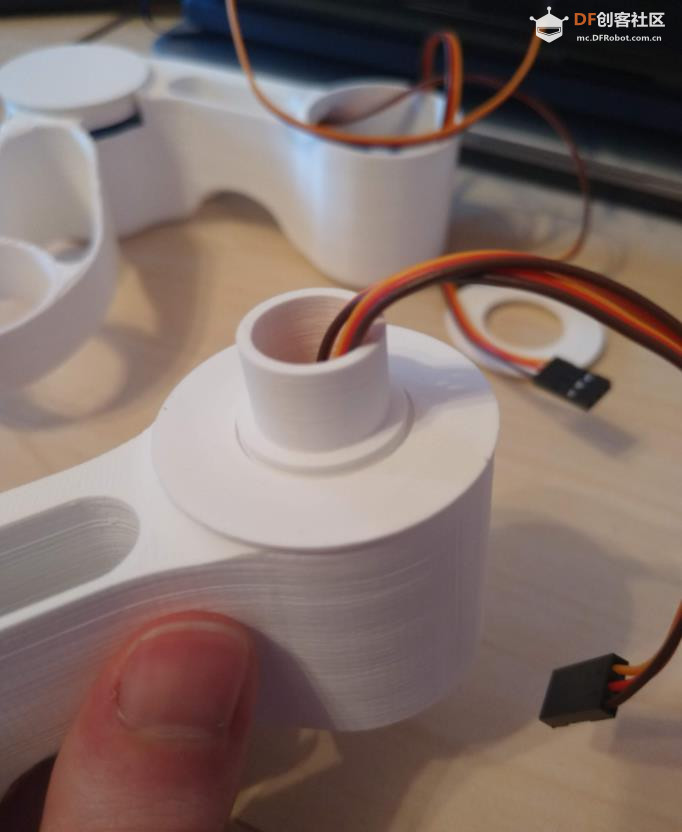  |
|
## 第七步:身体 打印身体 需要打印两块超长的部件——分别是机身和盖子,但幸运的是,它们第一次打印的质量就很好。我用的是Cura生成的普通支撑,打印完成后,用手指、钳子和手术刀就能轻松取下。幸运的是,这些大型部件没有出现翘曲问题,但在开始打印之前,一定要确保打印床已经调平并清洁干净!打印完成后,我可以像你看到的一样,对主要部件进行试装,结果发现它们很快就装好了,这让我很满意。 您还可以将 8 个 M2.5 六角螺母用强力胶粘到机体内的凹槽中,注意不要让胶水进入螺纹中。 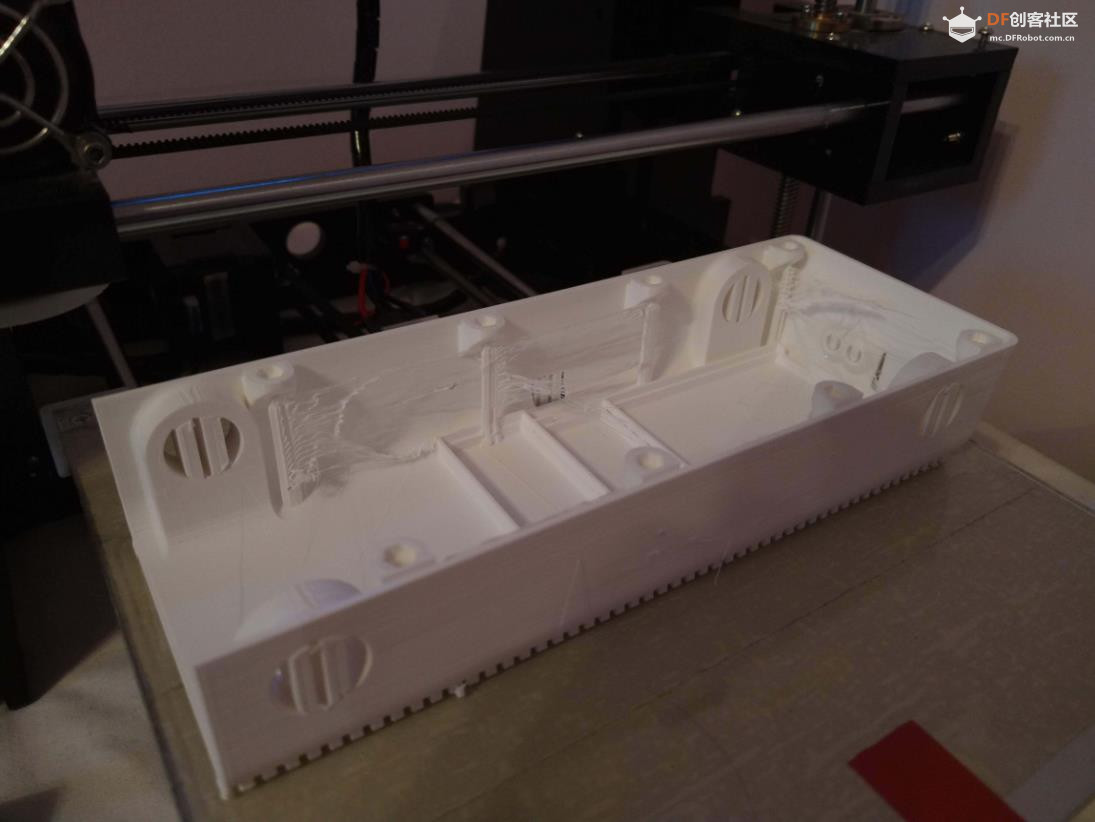 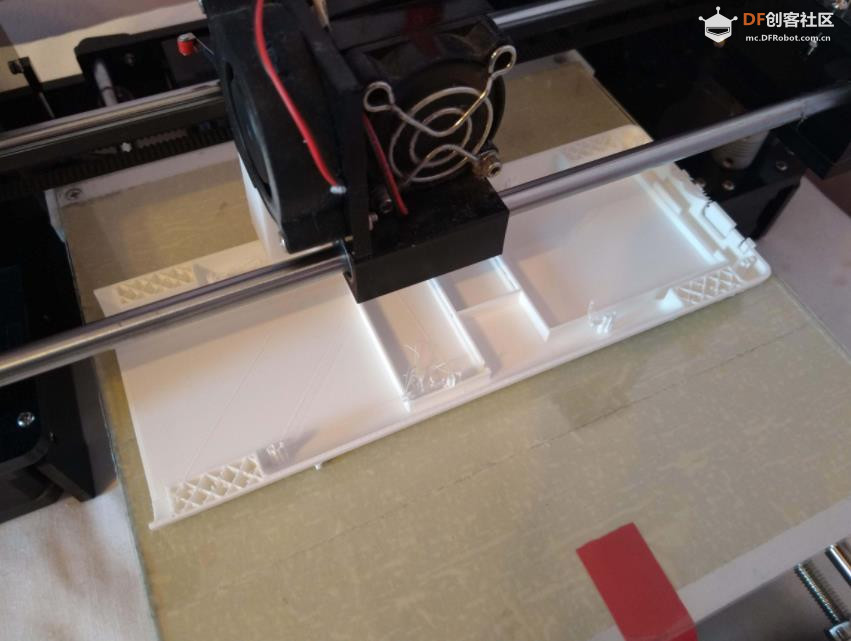 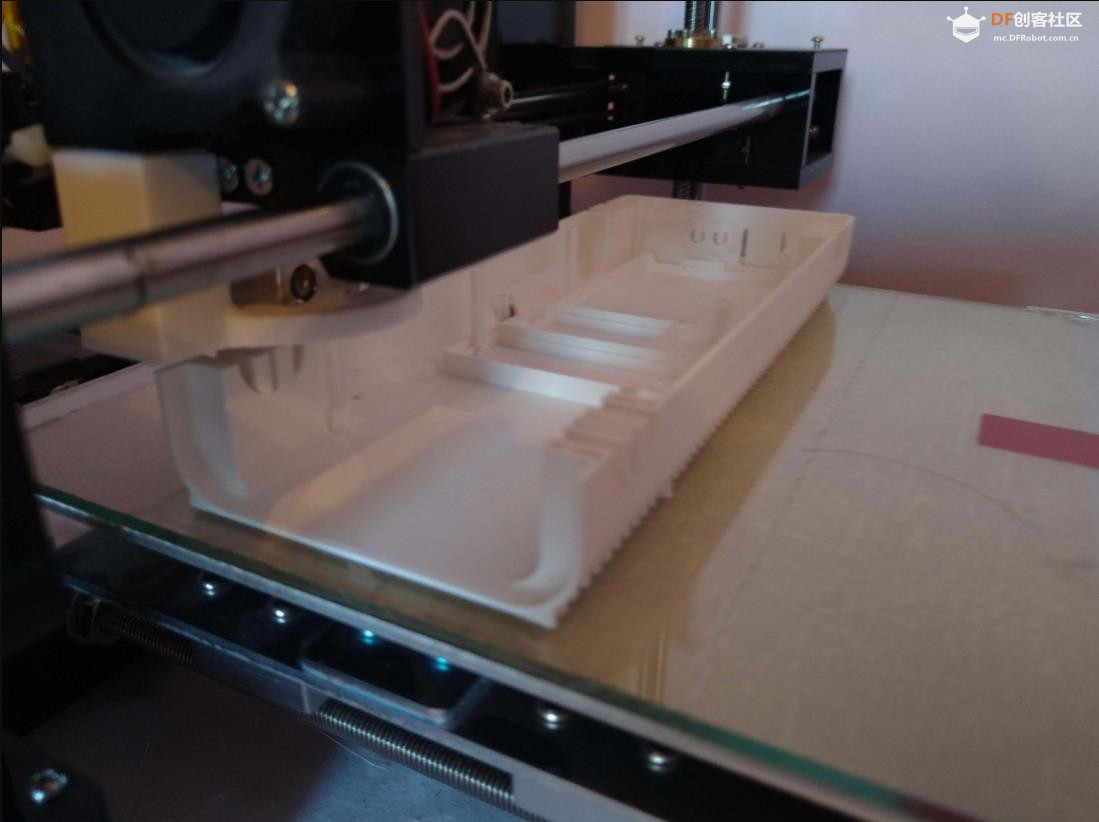  |
|
## 步骤8:电气原理图 这个原理图(我用 PowerPoint 制作,因为 Tinkercad 上没有我需要的所有元件)应该能尽可能清晰地展示布局。当然,你可以随意修改,但我相信能够清楚地看到我是如何做的会很有帮助。 请参阅图表上的数字以获得相应的解释: SPDT 滑动开关-用于控制 PowerBoost 1000C 是否提供电源输出。它连接到 VS、EN 和 GND 引脚。更多信息,请参阅Adafruit Powerboost 1000C官方页面。 Powerboost 1000C -再次强调,请查看官方教程,了解具体的接线和引脚信息。电源从电路板连接到插线板上的两条导轨(为了清晰起见,图中铜条朝上,但实际上铜条朝下)。因此,您需要在插线板上创建一个 +5V 导轨和一个接地导轨,用于为所有其他组件供电。 伺服电机 -为了清晰起见,只显示了一个。我在接线板上添加了 8 组 3 个排针,一组连接到 +5V 导轨,一组连接到接地导轨,第三组连接到相邻导轨(用于连接信号线)。我用手术刀将信号导轨的各个部分分开,使每个伺服电机的信号引脚彼此隔离。 18560 电池 -如图所示连接到 Powerboost 1000C。 LDR -读数是通过如图所示的分压电路获取的,该电路通过一个 10k 欧姆电阻连接到地线。这根线连接到 Arduino 的一个模拟端口。LDR 的另一根线连接到接线板上的 +5V 电源轨。 HC-SR04 超声波传感器 -为清晰起见,图中仅显示一对中的一个。此类传感器有 4 个引脚(如果您的传感器有 3 个引脚,请查阅具体的连接指南,这应该没问题,但我将以 4 引脚类型为例进行说明,因为我使用的是 4 引脚类型)。传感器的 Vcc 和 Gnd 引脚分别连接到接线板的 +5V 和接地导轨。Trig 和 Echo 引脚连接到两个 Arduino 数字 I/O 引脚,如图所示。第二个传感器也采用相同的布置。 Arduino 电源输入 - Arduino 通过 5V 引脚供电。将一对来自接线板 +5V 和接地导轨的电线连接到 Arduino 的 5V 和接地引脚。[请参阅下方的注意事项]。 LED——为了清晰起见,图中仅显示一对 LED 中的一个,并附带导线。其阳极连接到 Arduino 的数字 I/O 引脚。另一根导线通过电阻连接到接线板的接地轨。 ***[注意事项]*** 通过 5V 引脚为 Arduino 供电并非官方推荐的供电方式,因为它会绕过部分电源调节电路。我之所以选择这种方式为 Arduino 供电,是因为 Powerboost 1000C 输出 5V,而我没有其他合适的替代方案。使用 5V 引脚是唯一能够在不使用 USB 的情况下以 5V 电压运行 Arduino 的方法,我希望将这个引脚闲置,并使其穿过机器人外壳,以便轻松上传程序。只要您遵循以下注意事项,就可以使用这种方式使用 5V 引脚: Arduino 不能通过 Powerboost 1000C 供电,也不能同时通过 USB 连接到笔记本电脑。通过 5V 引脚供电会绕过输入电源选择电路,导致 Arduino 过载并可能烧坏。在将 Arduino 连接到电脑上传程序之前,请确保 Powerboost 1000C 已关闭。为了提供额外的保护,最好断开连接 Arduino 5V 和接地引脚的线缆,从而将其与板载电源隔离。 5V 引脚的 5V 输入必须是稳定的 5V 电源。Powerboost 1000C 在这方面表现良好,但如果您决定使用其他开发板,请检查您的规格,确保其性能同样出色! 必须注意将 5V 线和地线连接到 Arduino 上的引脚,并从接线板上的导轨获取电源,否则 Arduino 可能会永久损坏。小心! 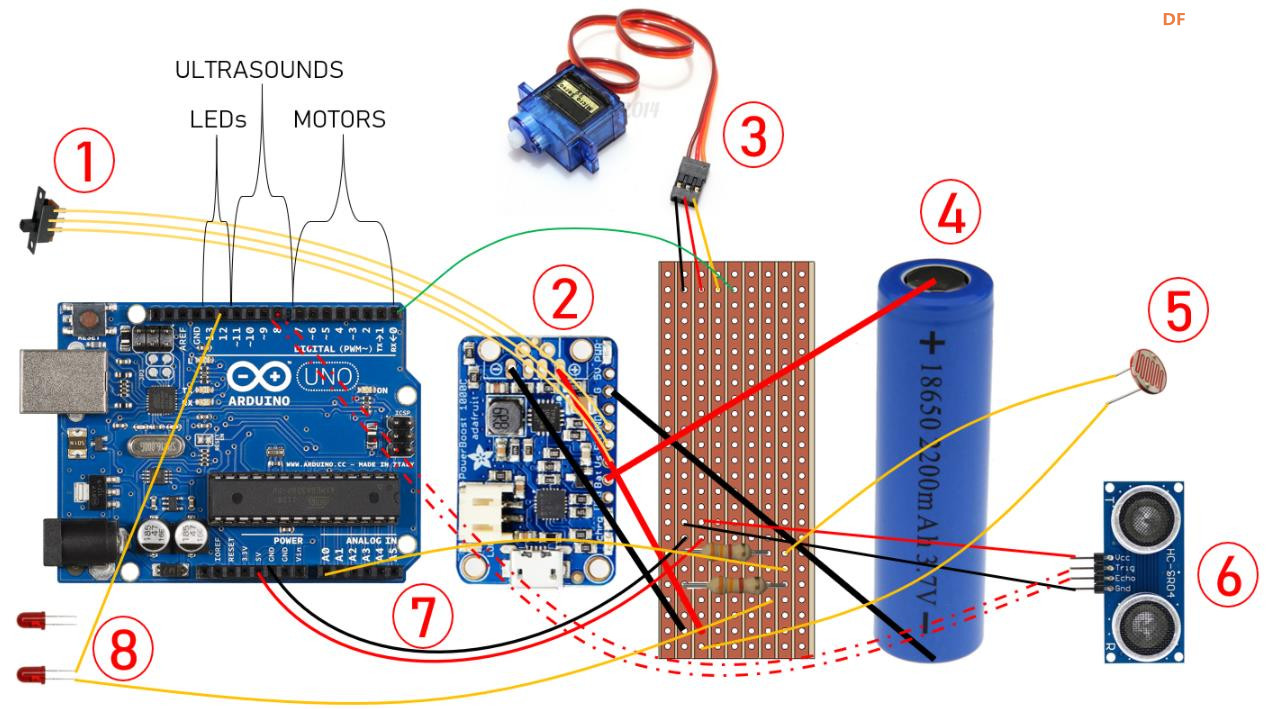 |
|
## 步骤9:接线 本节介绍机器人的接线。我花了几天时间才完成这一步,并尽可能地保持其整洁。 这些照片应该很容易理解,但需要注意的一个关键步骤是,将排针焊接到接线板上(伺服电机的排针共有8组,每组3个)后,需要用手术刀/美工刀在连接排针最外侧一个引脚的导轨上切开。这些引脚用于连接每根伺服电机电缆的信号线,必须将导轨的各个部分相互隔离,否则每个伺服电机都会收到来自Arduino的多个令人困惑的信号。 我没有用强力胶把Arduino、PowerBoost 1000C、LED、超声波或接线板粘到狗身上的支架上,摩擦力足够将它们固定到位。最好就这样粘着,这样你以后需要的时候可以随时取下来——在搭建过程中,我反复把它们拆装,调整线长、连接等等!作为接线过程的一部分,在安装HC-SR04超声波传感器和LDR之后,还要用强力胶把头部粘到狗身上。 我打印的最后一部分是18650电池的电池座。我用了几条金属条作为电池座内部的触点,并焊接了电缆,将其连接到Powerboost 1000C。这种方法效果很好,但也许买一个电池座,然后把它粘到车身上会更简单! 如何使用万用表! 在执行此类任务时,一个基本的万用表(我的是袖珍型基本型)非常有用。使用电压表设置,您可以测量电池电压,例如 Powerboost 1000C 的输出。欧姆表设置在焊接时非常方便。如果您预计接线板上的两个焊盘、电线或轨道是电连接的,您应该看到它们之间的电阻接近 0 欧姆。如果您预计两个地方没有连接(例如接线板上的 5V 导轨和地导轨),那么您应该看到无穷大的电阻——如果您看不到电阻,那么您就知道它们短路了,需要回去检查! 我曾经不小心把接线板上的5V和地线短路了——只留下了一根细小的焊点。不幸的是,我没有检查就用电池打开了电源,结果短路了——Powerboost 1000C变得非常热,还发出一股浓重的烧焦味!如果我当时用万用表检查一下,就不会出现这种情况了——我差点中风,不过还好狗狗没事! 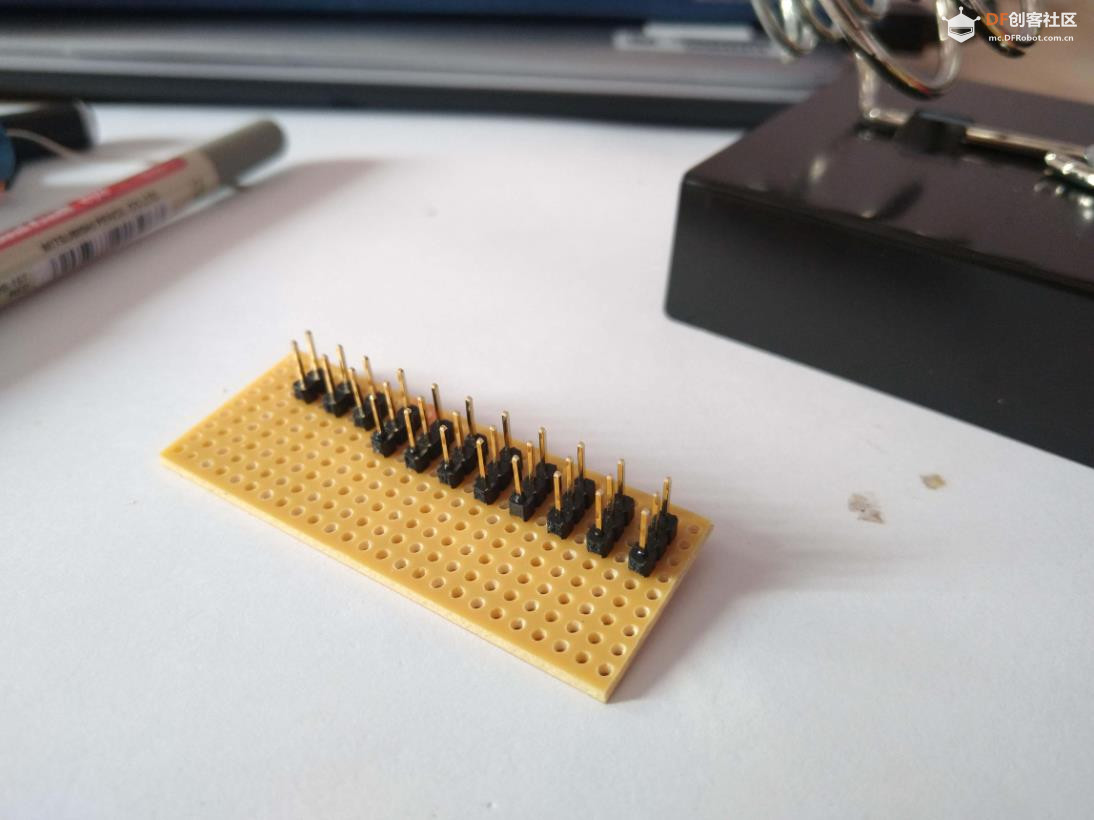 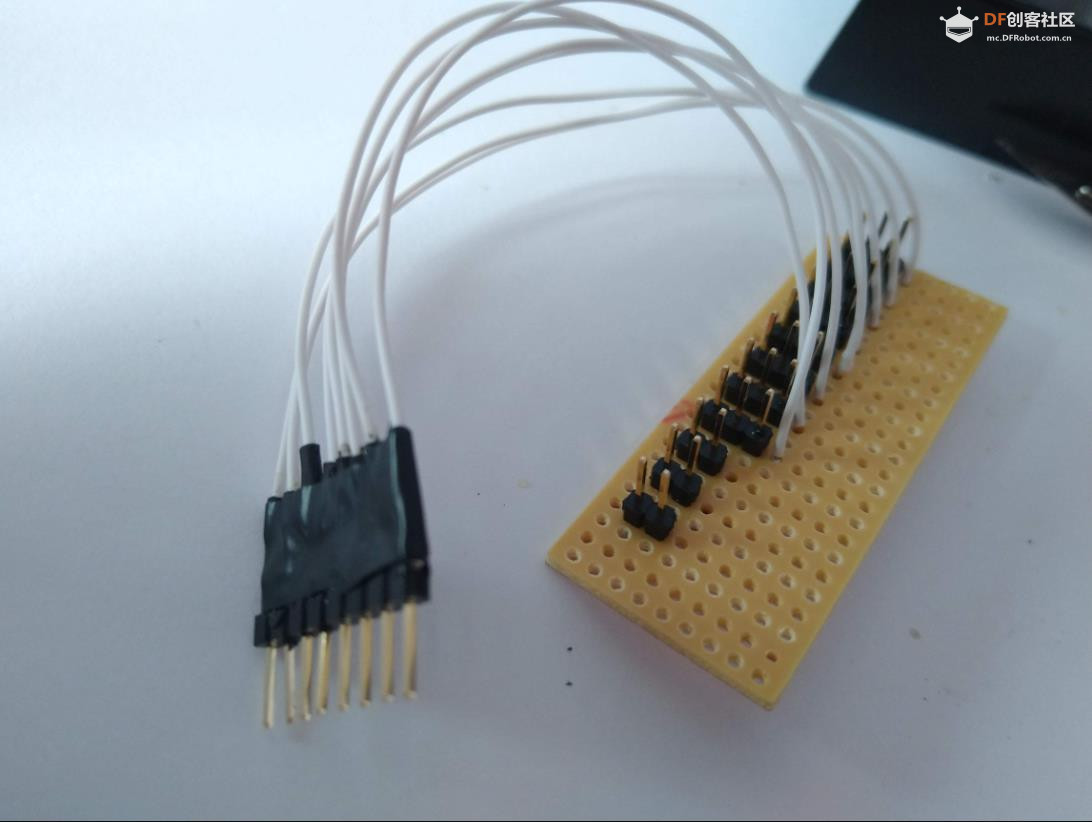 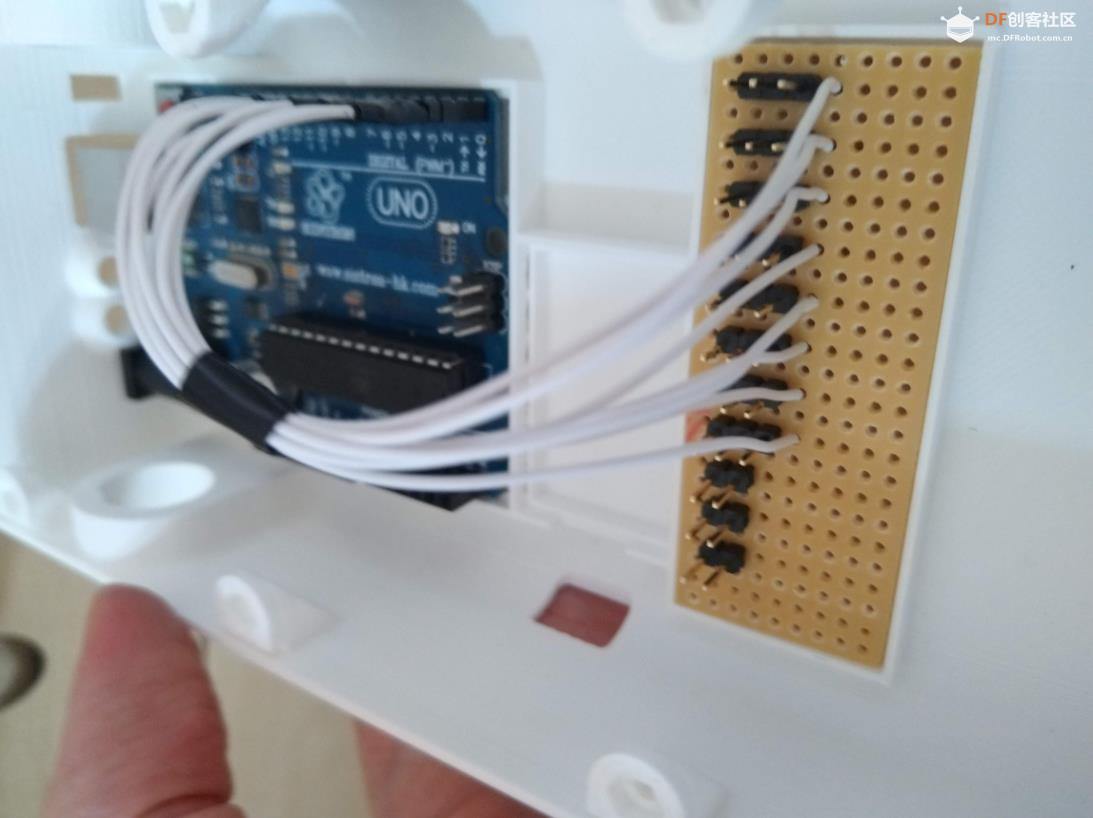 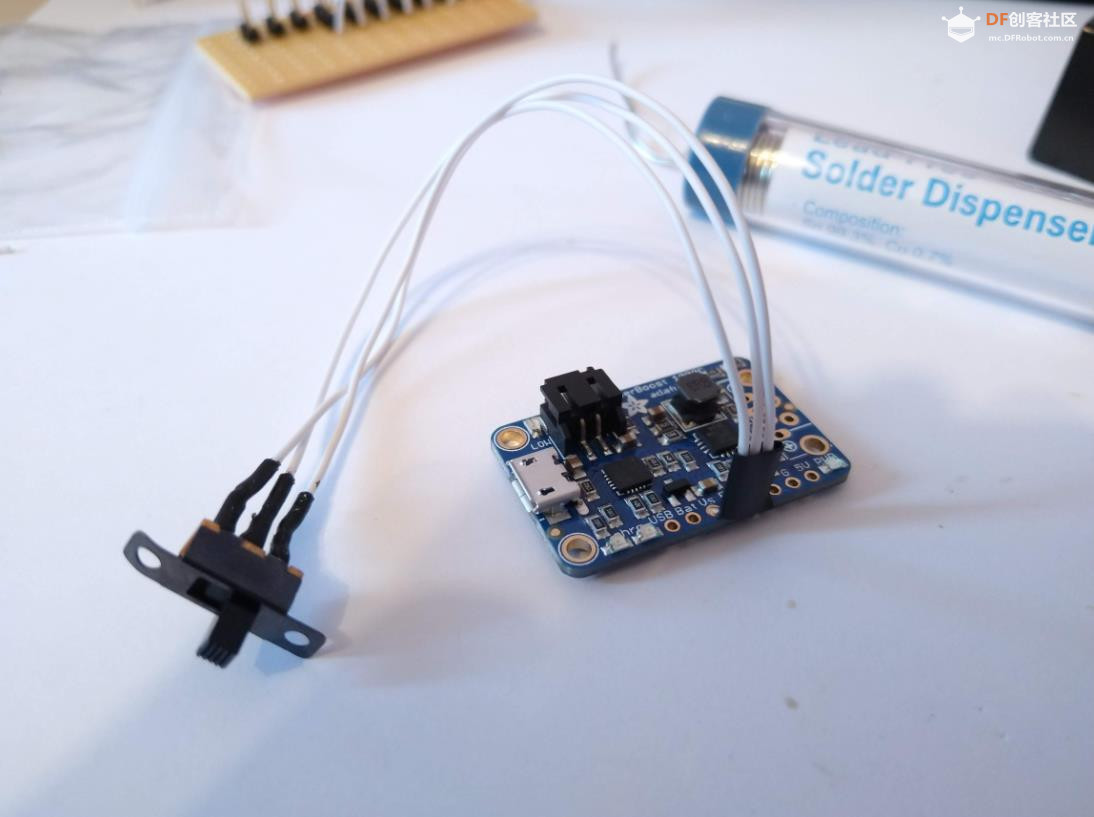 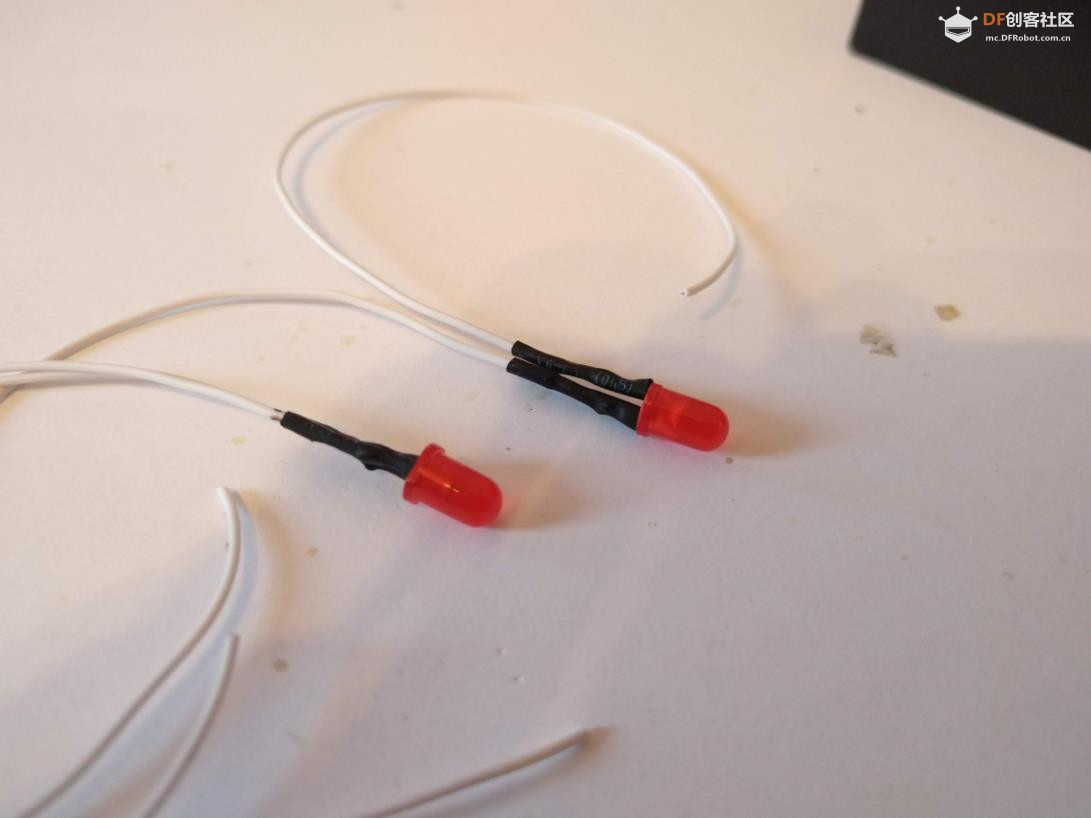 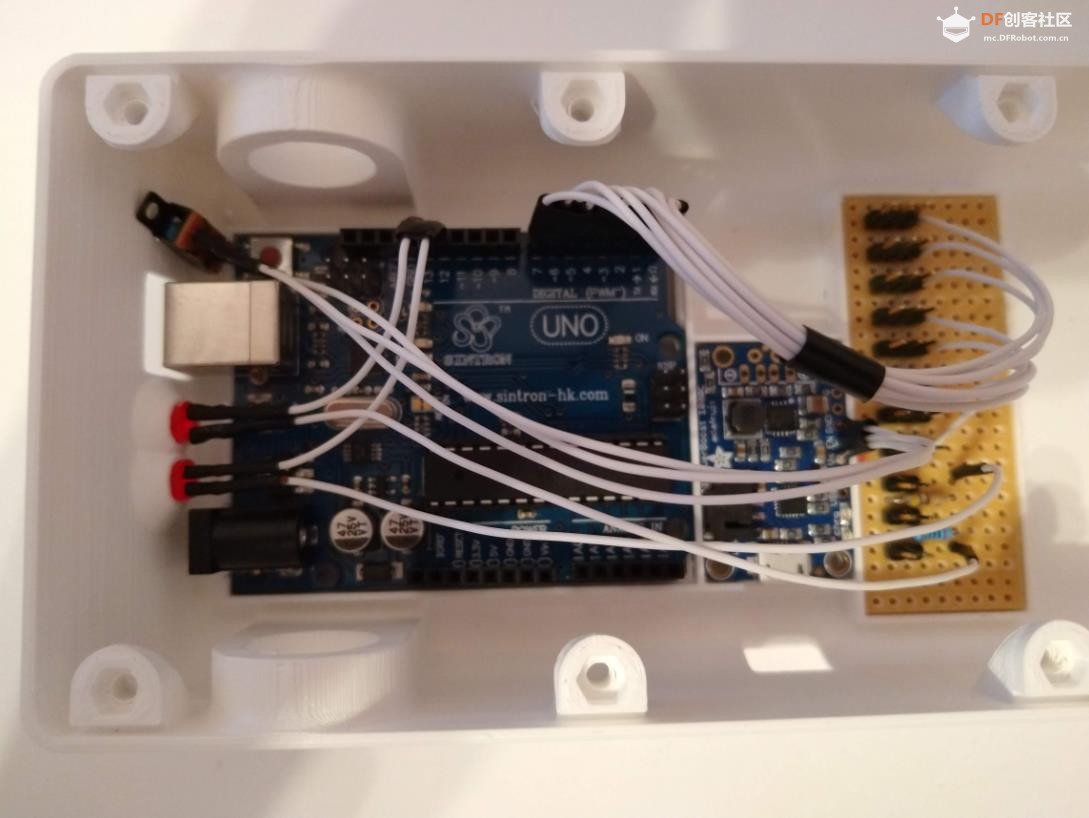 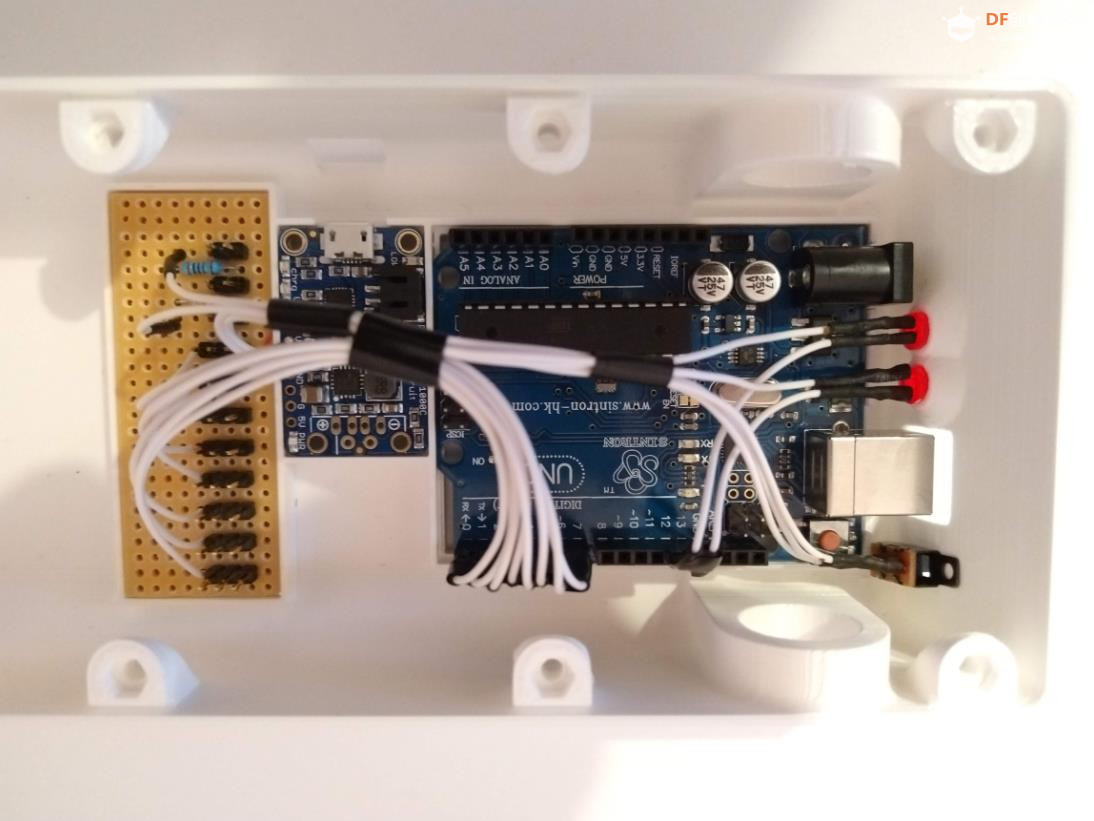 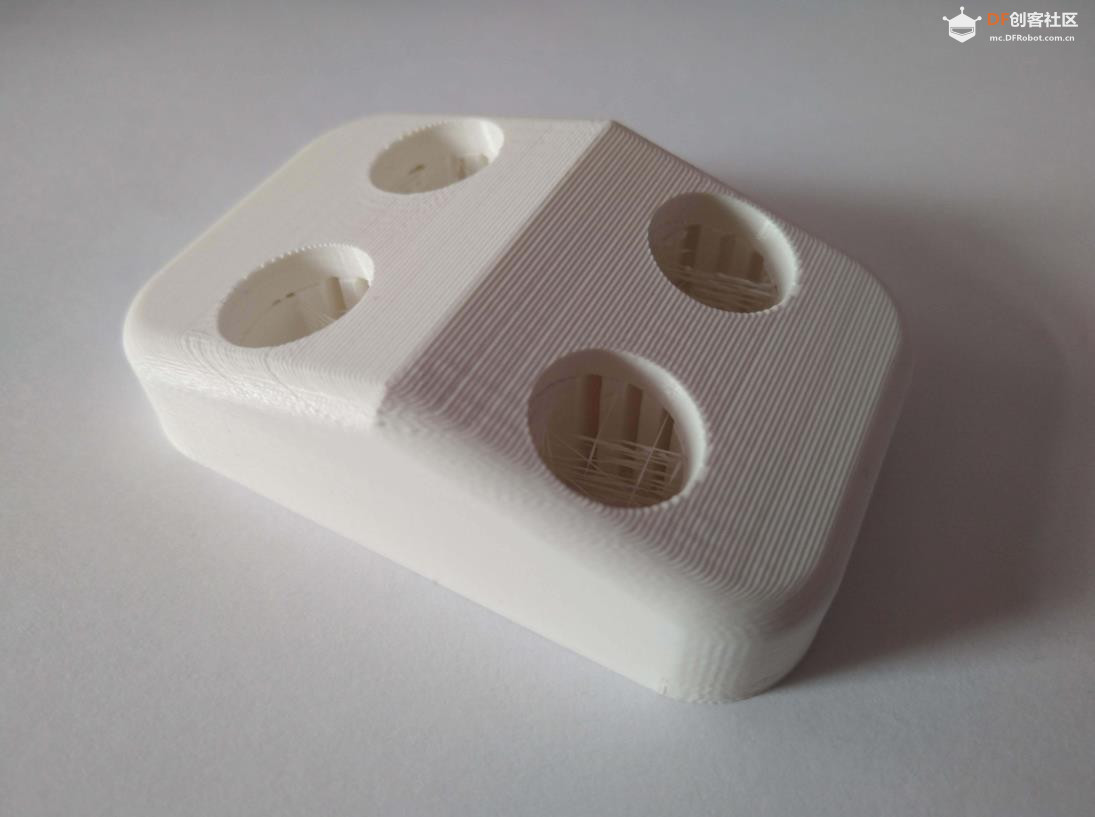  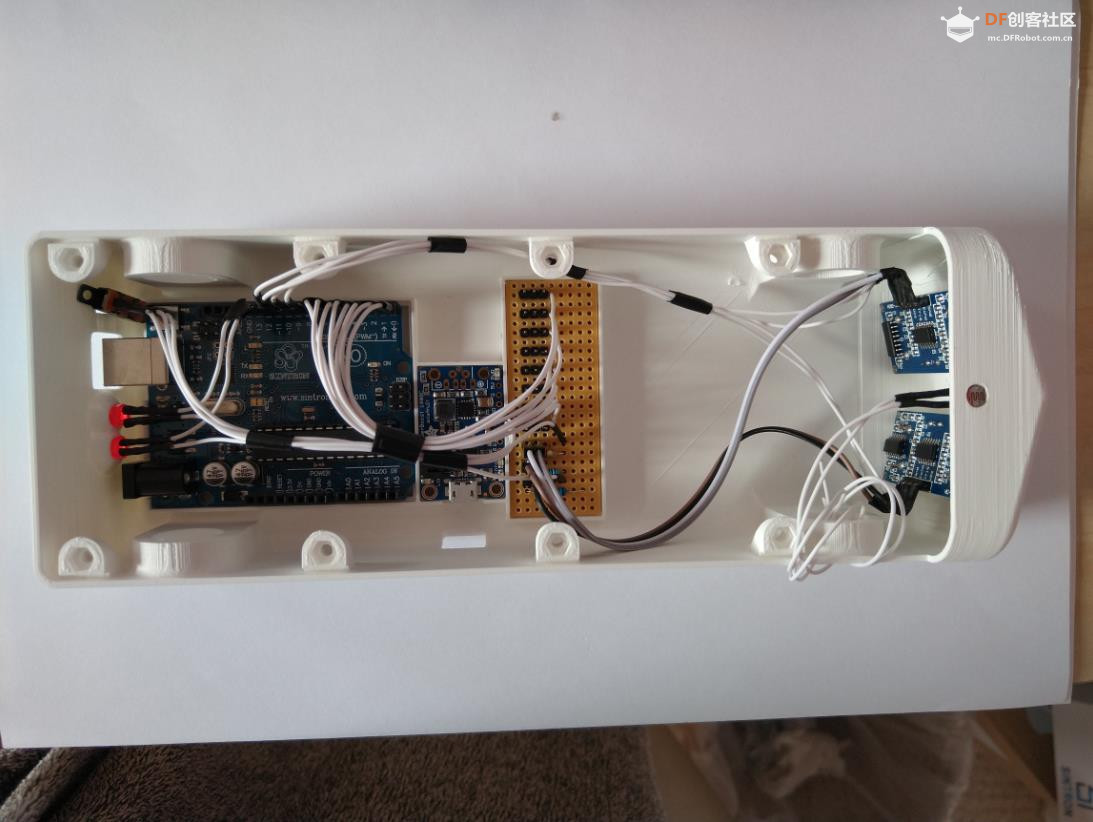  |
|
## 步骤12:编程 注意:这些塑料模型盒尺寸正好,方便我在编程时放置机器人——希望你能找到类似的!机器人断电后,腿部无法支撑机器人站立,因为站立需要伺服电机的扭矩。因此,你需要一个像这样的支架来支撑机器人。 伺服同步运动- Arduino 程序本质上是单线程的,因此无法同时执行两件事。使用的方法是逐步移动腿部,交替微调每个电机的步进,从而营造出同步运动的效果。您可以在我上传到 Instructable 此步骤的程序中看到如何实现这一点。我的灵感来自自动钢琴(自动演奏钢琴)的卷轴,它有小孔,可以按顺序弹奏不同的琴键。 步态- 我花了很长时间观看真实狗狗行走的慢动作视频,以进一步了解它们的运动。狗狗行走时,总是会与地面接触三个点,一只爪子同时离地,另一只爪子落地。更快的步态需要两只爪子同时离地。我编写了大约5种不同的步态程序,并不断尝试代码,寻找能够实现最佳平衡和运动的方案。附件代码中的运动方式是每次移动一条腿,并相对于双脚移动机器人的身体,以确保重心保持在固定的腿上,从而确保狗狗不会翻倒。 函数- 代码使用了多个函数,例如“pawtrick”和“forwardstep”,它们可以接受输入来定义步数。每走一步后,鼻子里的超声波传感器都会被读取,如果两个传感器都检测到附近有物体,步行代码就会暂停。 未来功能- 将两个超声波探头以偏离中心 15 度角安装的目的是为了让狗狗在检测到障碍物时能够决定转向哪个方向。此外,由于腿式机器人的运动方式多种多样,因此也有很多机会可以尝试不同的步态和行走方式! LDR - 狗狗头上的 LDR 是一种简单的人机交互方式。狗狗会检测到自己被遮挡(例如用手/手指放在上面)3 秒,然后触发“爪子技巧”功能。  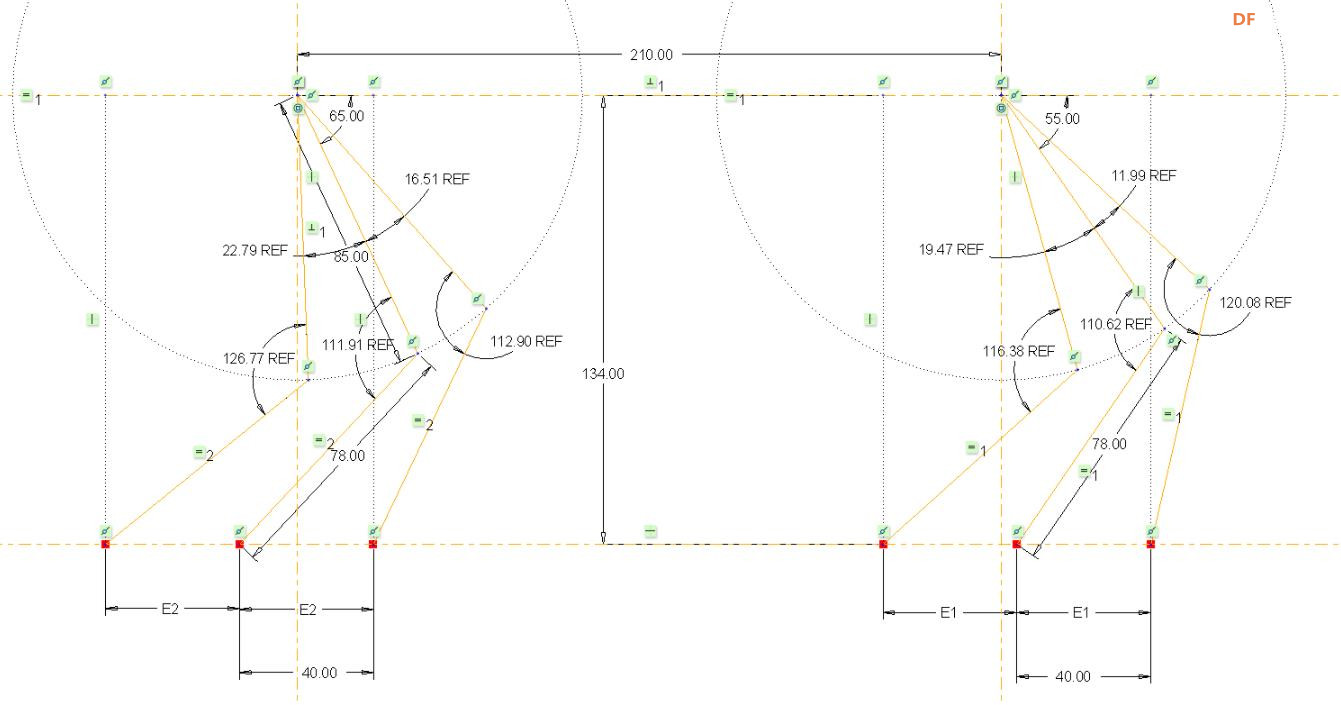 |
|
## 步骤13:潜在的改进 潜在的改进 凭借我搭建这个机器人的经验,我渴望用我学到的东西再搭建一个。我会做出几项主要的改进,但你不妨从一开始就将这些改进纳入你的搭建中。以下是我推荐的一些改进,无先后顺序: 伺服电机的选择——我在这个项目中使用的电机质量很差——是仿制的TowerPro SG90伺服电机,带塑料齿轮。我不知道它们是否能达到宣传的额定扭矩,而且塑料齿轮会导致腿部产生不必要的反冲。每个伺服电机的价格略高于1英镑,但只要大约6英镑,你就能买到一个带金属齿轮、额定扭矩更高的高品质伺服电机。如果你能多投资一点,那将会很划算,因为我的机器人扭矩很小,但反冲相对较大,这确实造成了一些问题。大多数9g伺服电机的尺寸都差不多,所以3D打印部件的CAD应该不需要太多修改。 脚部抓地力——正如您在这篇教程中看到的,我最初的脚部设计抓地力不足。我加装的钉子大大改善了抓地力,但或许您可以考虑在脚部添加橡胶块作为抓地力鞋底,或者在3D打印部件上设计不同的钉子或纹理。 平衡和脚间距——我最初的设计中,双脚之间的宽度足够,但很小。为了提高平衡性,我建议稍微增加双腿之间的距离,例如修改腕部。此外,目前每个脚的宽度为15毫米(约0.6英寸),但如果更宽一些,例如25毫米(约1英寸),平衡性会更好。如果您能够在CAD中进行此项更改,值得研究一下。 Powerboost 1000C - 我根据现有资源为机器人选择了这款电源板。它体积小巧、功能强大,确实是个不错的选择。然而,它在 5V 电压下能提供的最大电流约为 2A。单个 9g 舵机在最大扭矩下会消耗高达 0.5A 甚至更高的电流,因此 2A 显然不足以让所有电机全功率运行。如果您有 PowerBoost 1000C 的合适替代品,可以考虑,但前提是您精通电子技术,并且了解需要进行的改动。 反冲- 反冲或“松弛”是指由于间隙和过大的机械公差而导致机构中失去运动。这与本机器人腿部关节有关。如果您的3D打印机可以打印出非常高质量的图像,那么可以考虑减小肩关节和膝关节中旋转/运动部件之间的间隙——这些关节越好、越紧(但仍能自由运动),腿部运动效果就越好。 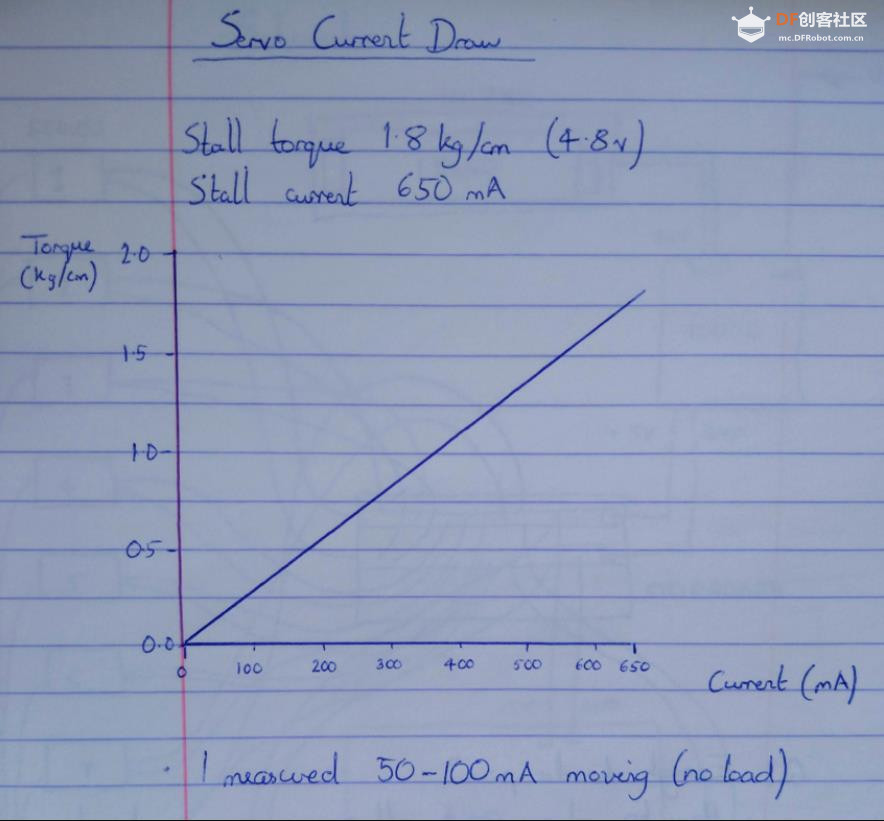 |
|
## 步骤14:尾端 感谢您阅读我的教程,希望您喜欢。如果您被鼓励自己动手做一个,那就太好了!我会尽力解答您的任何问题。我非常喜欢这个项目,尽管从头到尾花了大约3.5周的时间(同时还要全职工作)确实很忙碌!我从中学到了很多东西,希望能应用到GoodBoy 2.0上,所以也许以后您会看到一个相关的教程…… 附言:非常感谢大家对这个教程的热情,很高兴收到大家提出的改进建议。我会在我的YouTube频道上发布更多教学视频,帮助大家自己动手做一个。GoodBoy V2 也正在开发中!   |
|
本帖最后由 驴友花雕 于 2025-6-8 15:34 编辑 附录 项目链接:https://www.hackster.io/news/who ... ot-dog-6273b6f703e4 项目作者:杰里米·库克 项目代码:https://content.instructables.co ... FQDXQZCKAMI5ZU8.ino 3D文件:https://grabcad.com/library/goodboy-robot-dog-1 https://d2t1xqejof9utc.cloudfron ... b3b722/original.stp CAD 文件:https://grabcad.com/library/goodboy-robot-dog-1  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






