|
1969| 8
|
[项目] 【Arduino 动手做】月神3号物联网视频月球车 |
|
## 步骤 1:所需组件 这是一个模块化设计,它有两个控制板:Arduino 和树莓派。两者独立工作。如果预算不足,可以省去树莓派和摄像头,探测车仍然可以通过蓝牙工作。树莓派仅用于控制摄像头以及通过 WiFi 和互联网控制探测车。探测车的移动由 Arduino 控制。两个设备的电源不同。 控制系统组件 Arduino Uno L293D电机驱动器屏蔽 6个直流电机 6个轮胎(3D打印) 正文+链接(已打印3份) 2个伺服电机 各种附件(3D打印) 5mm、4mm、3mm 和 2mm 螺丝 自锁螺母 4mm 和 5mm 7V电源 网络控制组件 树莓派 USB 网络摄像头(用于视频流和录制) Pi 相机(用于静态图像) 5V电源 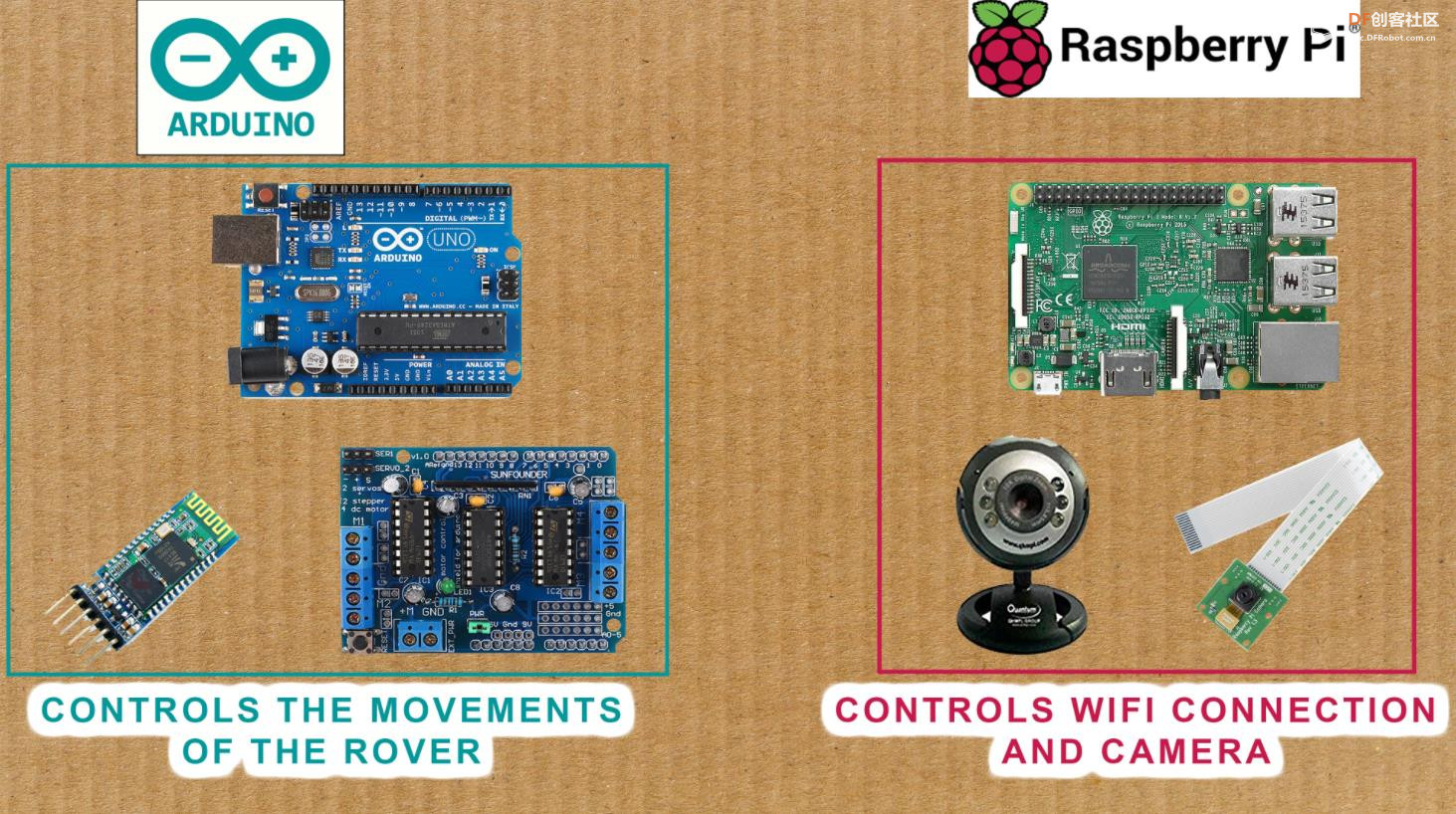 |
|
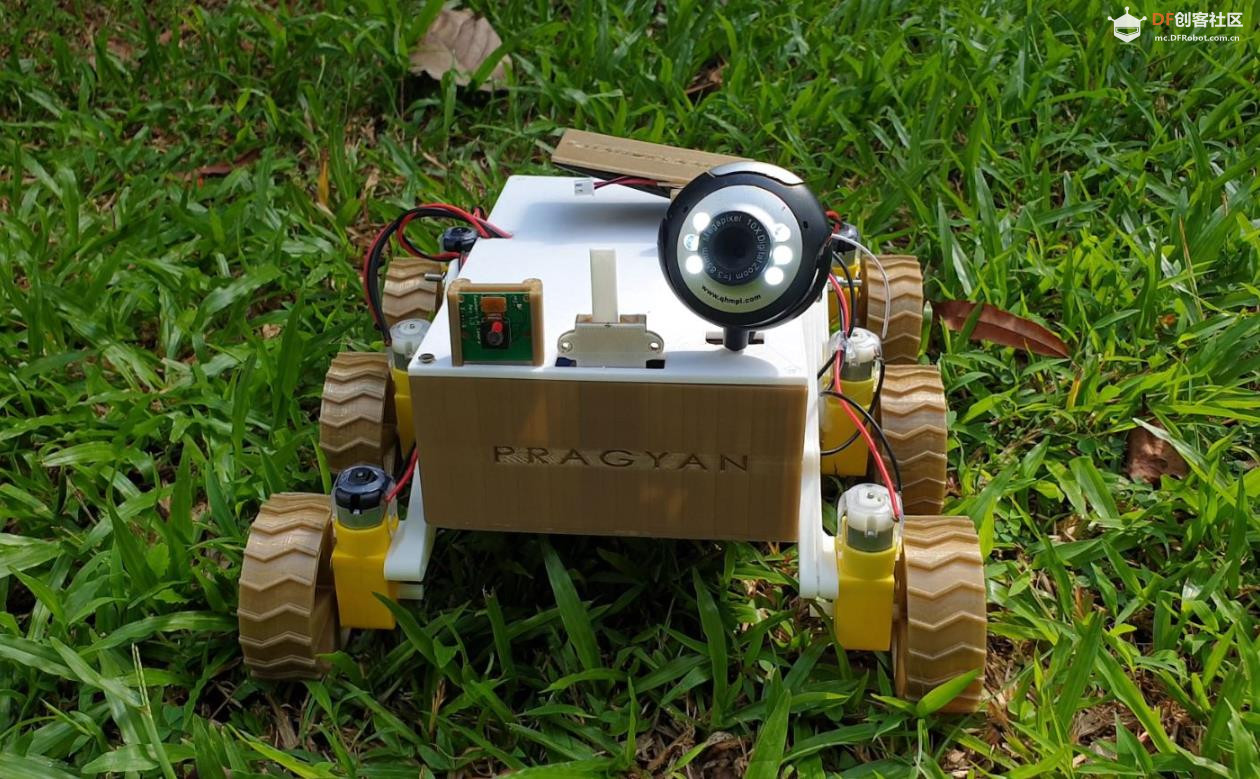
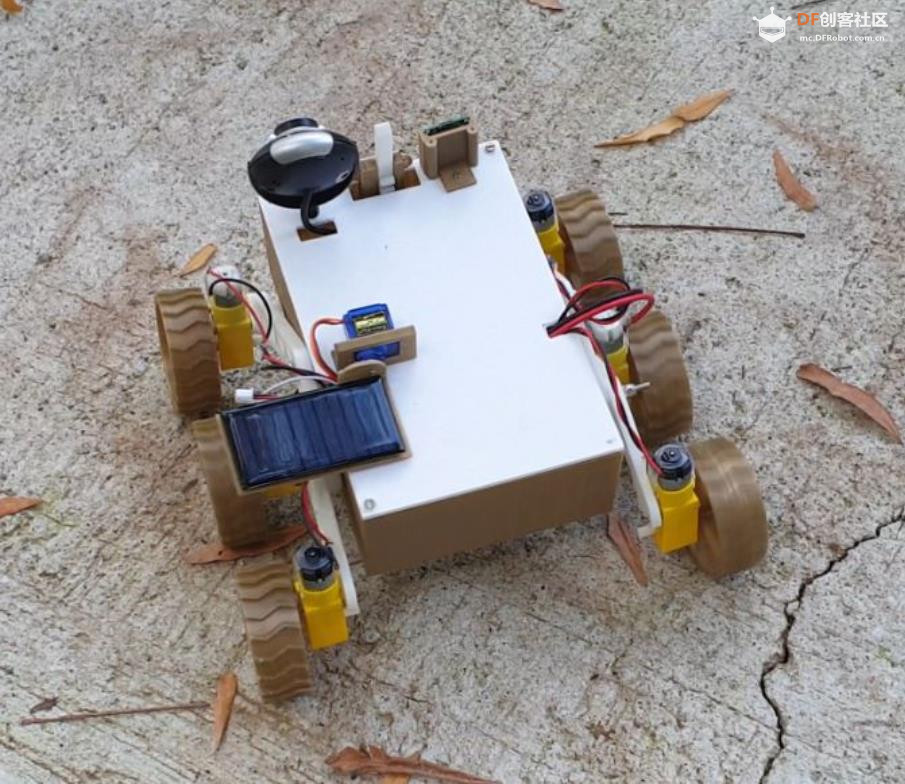
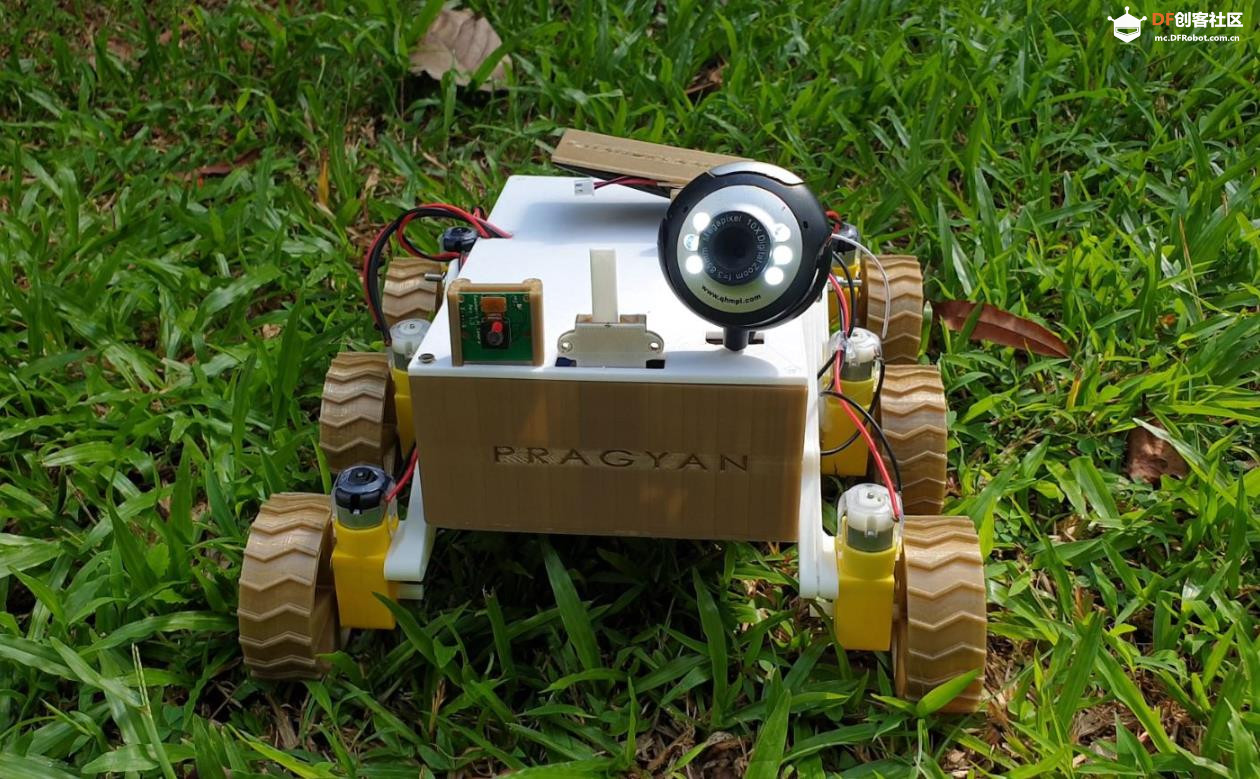
## 步骤2:主体和附件 如果您有 3D 打印机,您可以直接打印所有内容,但是如果您没有,您可以使用午餐盒作为主体,并使用 PVC 管制作摇臂转向架机构的连接件,我将留下链接供您参考。 如果你不想,可以把附件留下,探测车仍然可以工作。天线和太阳能电池板是我刚刚添加的,因为我有很多时间和备用零件。 CAD 建模是在 Solidworks 2017 中完成的。我同时提供了 STL 文件和 Solidworks 文件,以便您可以根据需要进行修改或直接打印零件。我使用 Ender 3 pro 打印零件。 观看视频以更好地了解如何组装火星车。 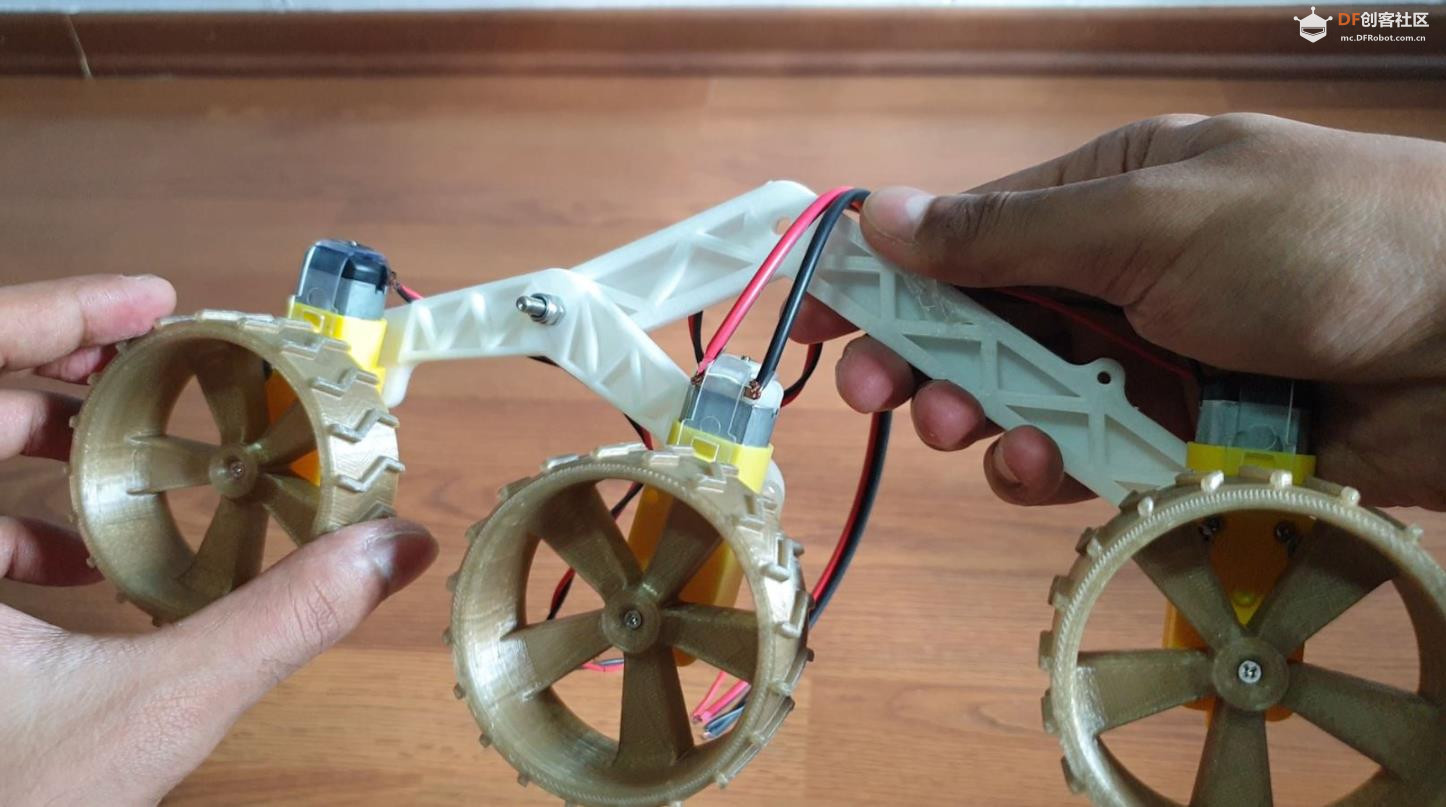 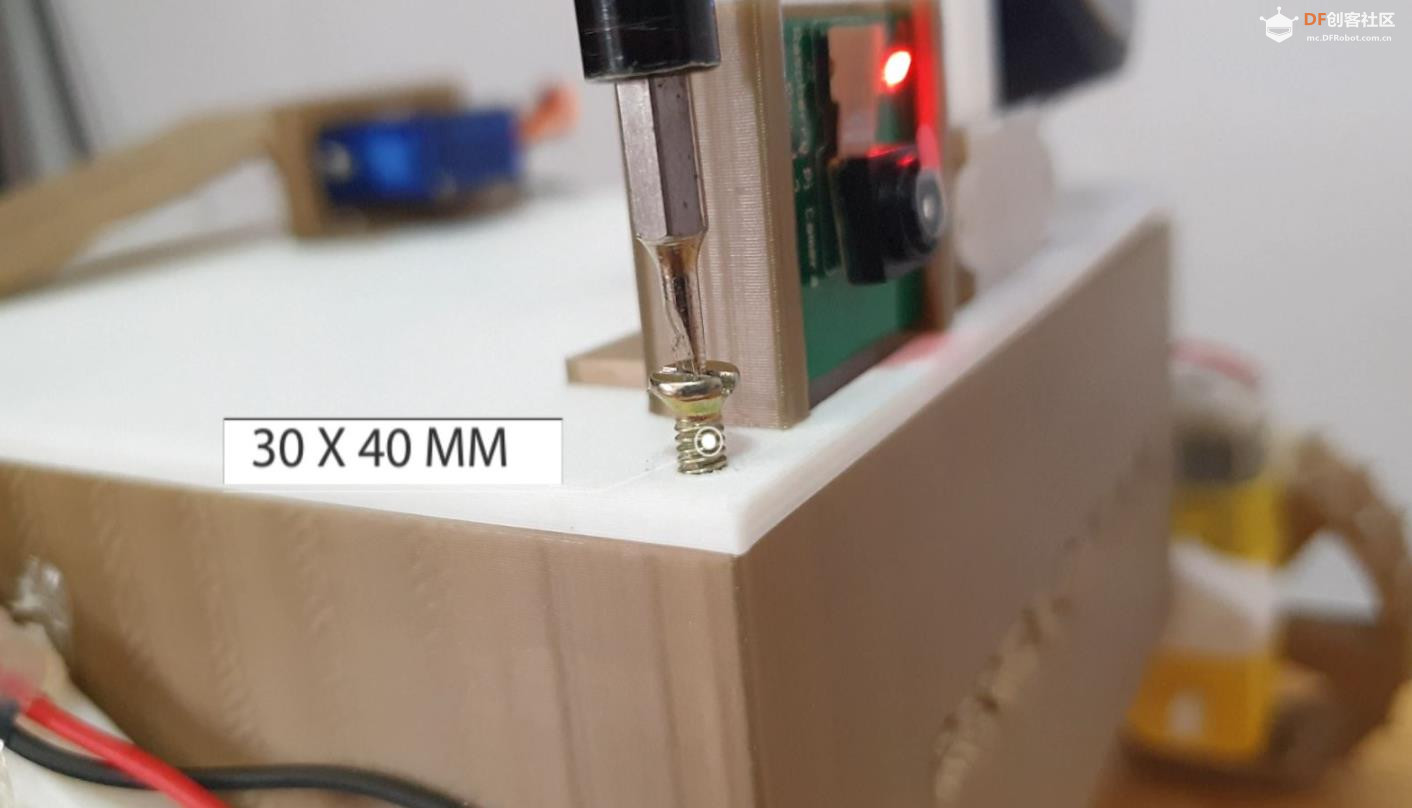 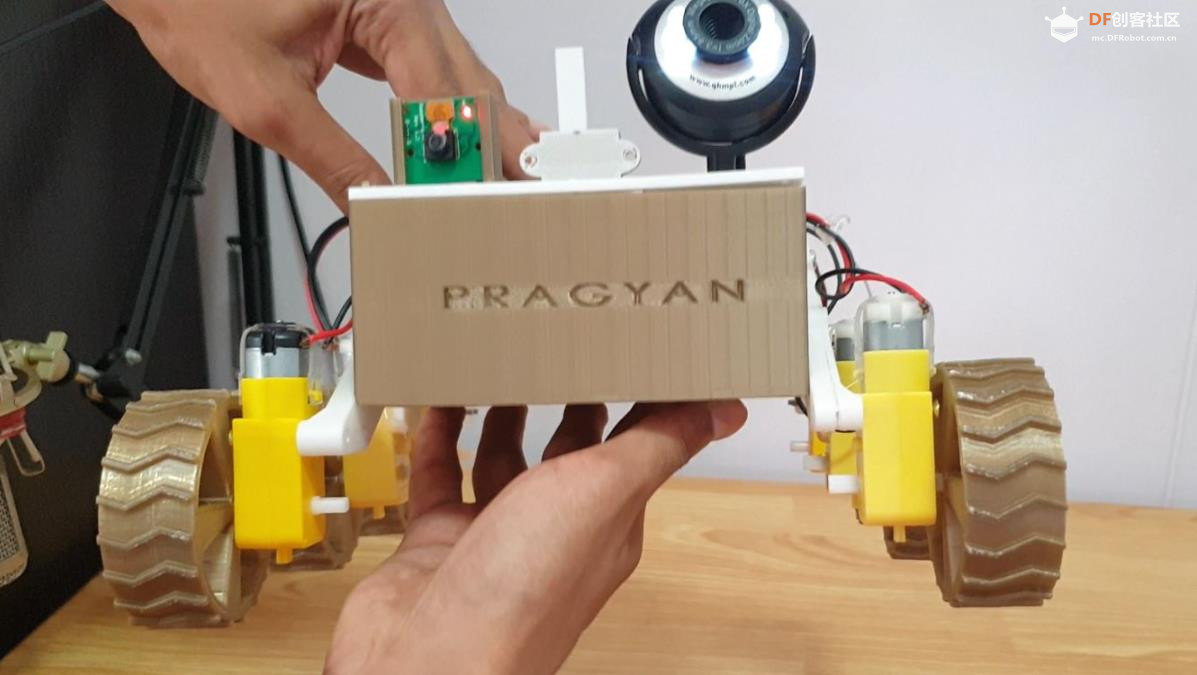 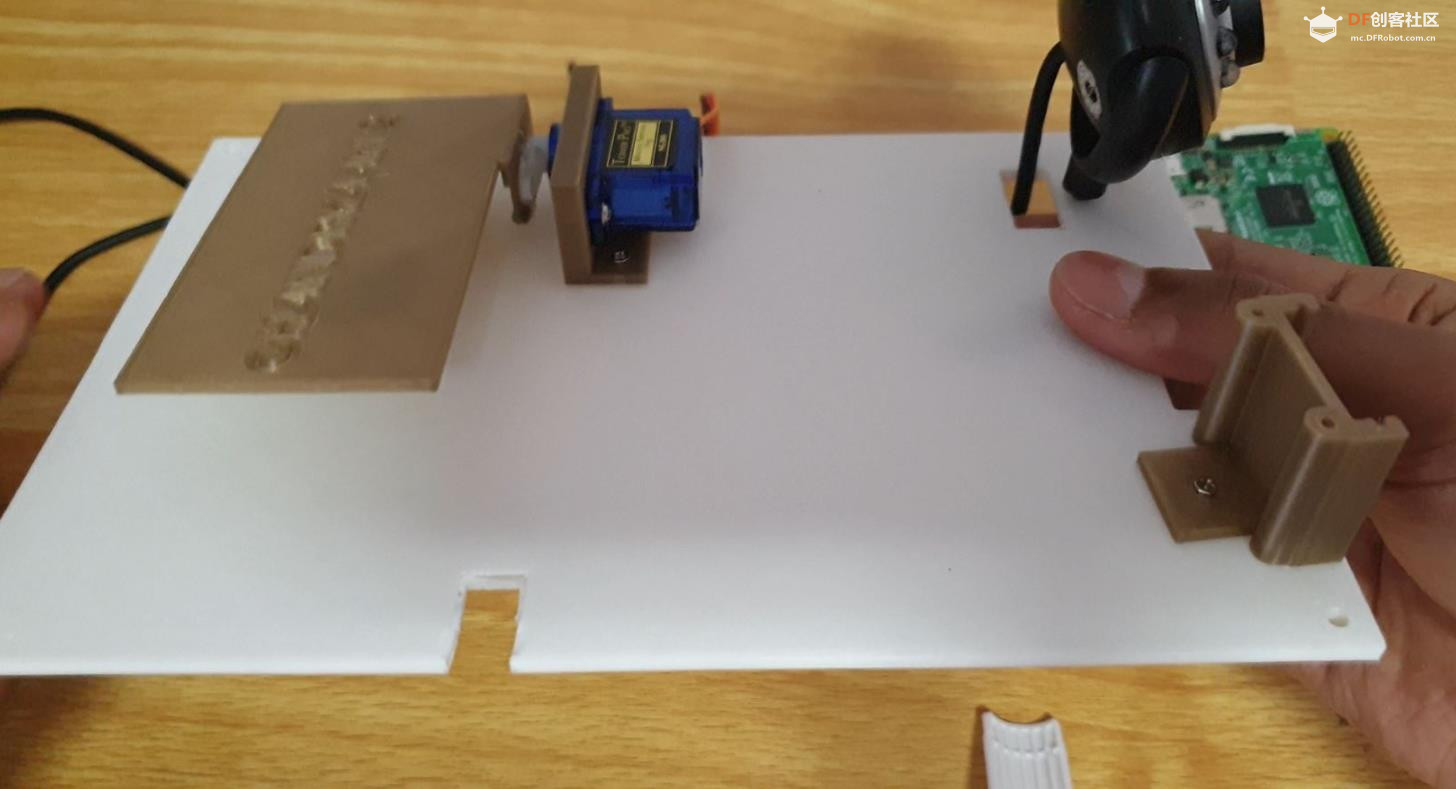 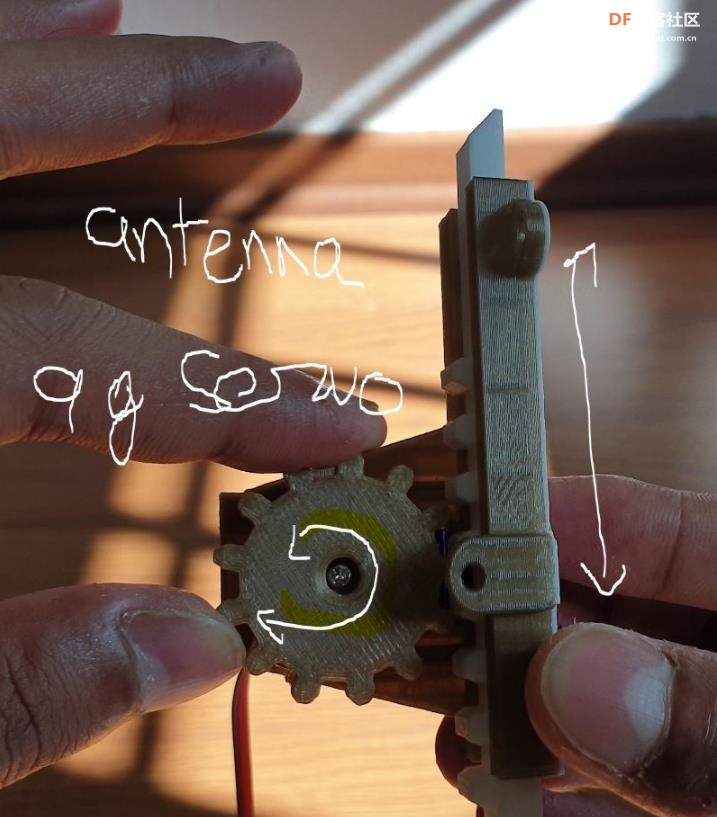 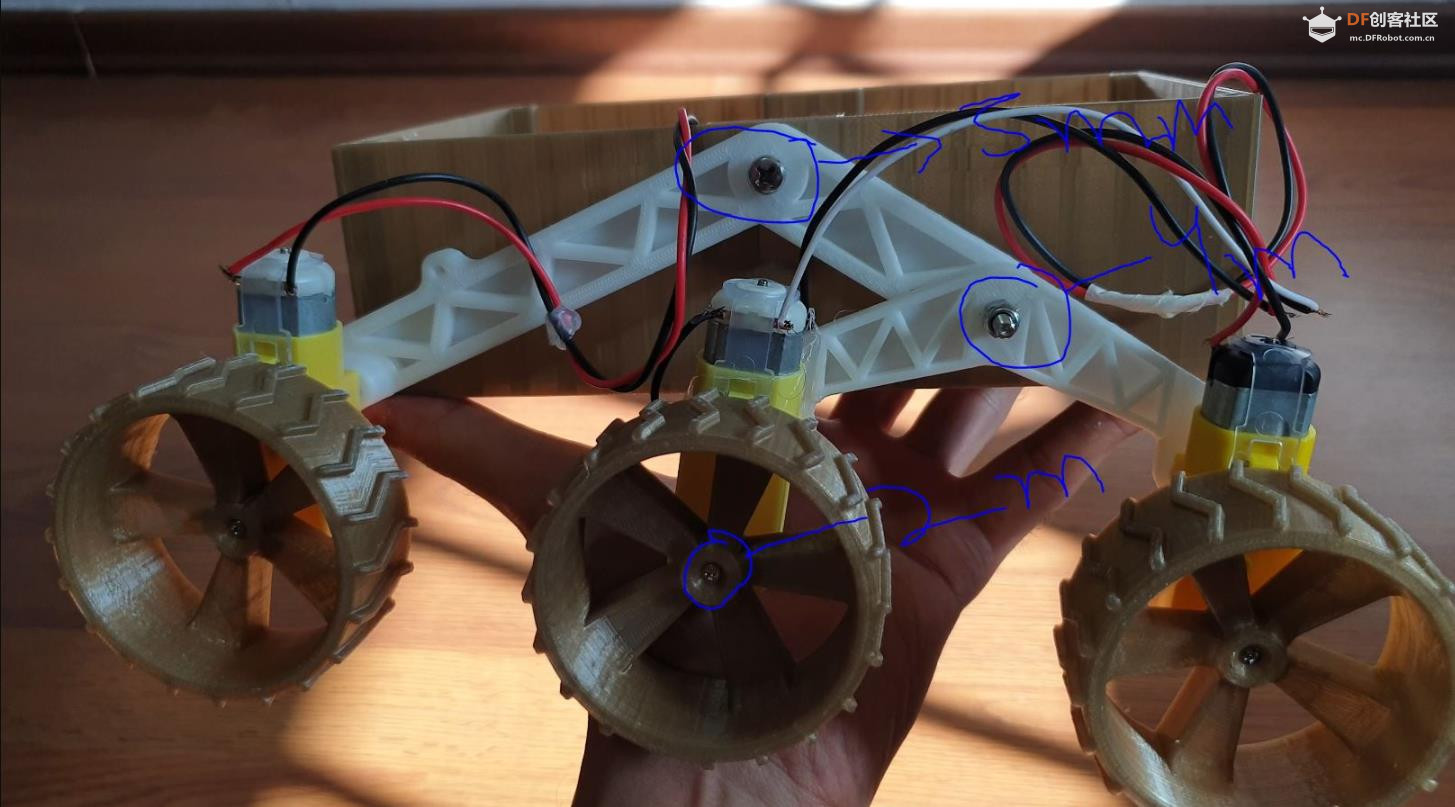 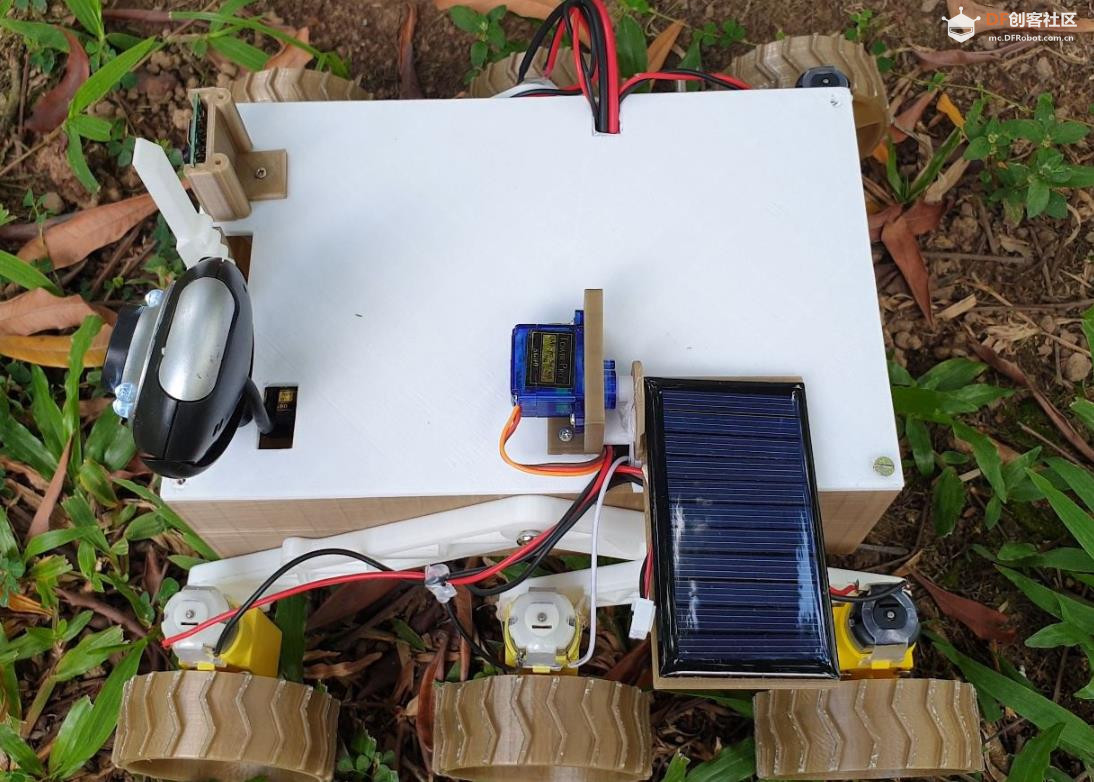 |
|
## 步骤3:接线和电路 使用上图将所有电机连接到 arduino 板。 我们将在每侧将两个电机连接到单槽电机上。如果电机运转方向错误,只需交换电线即可解决问题。 对于 Raspberry pi,将 USB 网络摄像头连接到 USB 端口,任何摄像头都可以工作,无需安装 将 Raspicamera 模块连接到电路板上的连接器插针。 重要的 仅向树莓派提供 5V 电源。请勿为树莓派和 ARDUINO 使用同一电源 你会烧坏你的电路板。 我知道使用两个电源很傻,但我这样做是为了让没有 raspi 和相机的人也可以构建它。 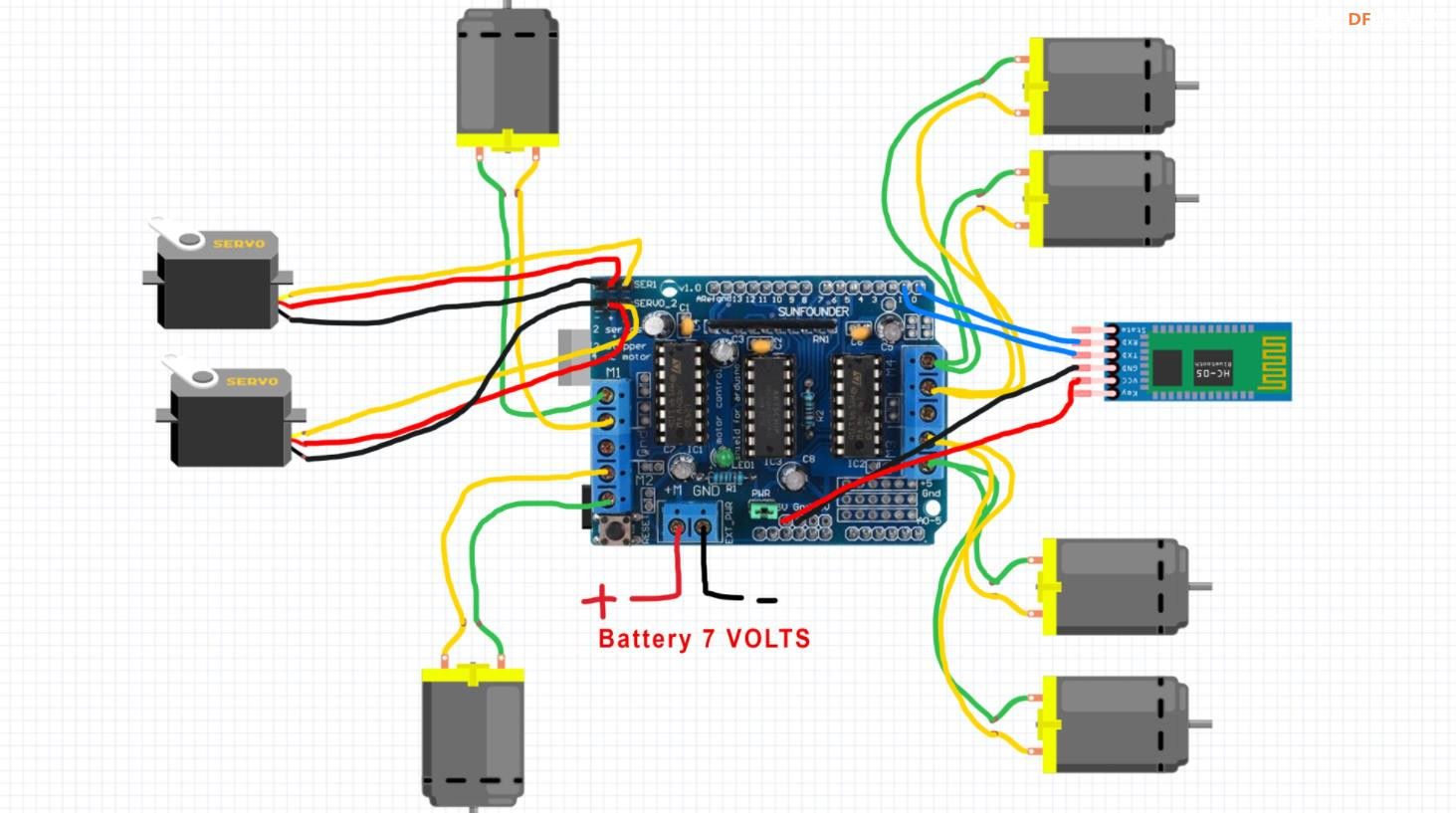 |
|
## 步骤4:控制探测车 有两种控制模式:一种是通过蓝牙使用安卓设备,另一种是通过 WiFi 和互联网 本地蓝牙连接 为此,您必须从 Play 商店下载蓝牙应用程序并连接到探测车。 用于 WiFi 和互联网控制 这有点棘手,因为我们要用树莓派。首先,你需要通过远程桌面连接 SSH 连接到树莓派。然后运行 Rovercontol 脚本,它会要求你通过蓝牙连接到 Arduino 开发板。完成后,它会打开一个窗口,使用 w、a、s、d 键来驱动探测车,然后按 j 键停止探测车。 要控制摄像头运行网络摄像头脚本,它将启动实时视频以拍摄静态图片,请在终端窗口中使用此命令 raspistill -v -o 测试.jpg 两个相机彼此独立工作,但可以同时使用。 要设置 RaspiCam,请单击此处 网络摄像头脚本使用在 Python 3 上运行的 Opencv 3 进行设置,请点击此处。 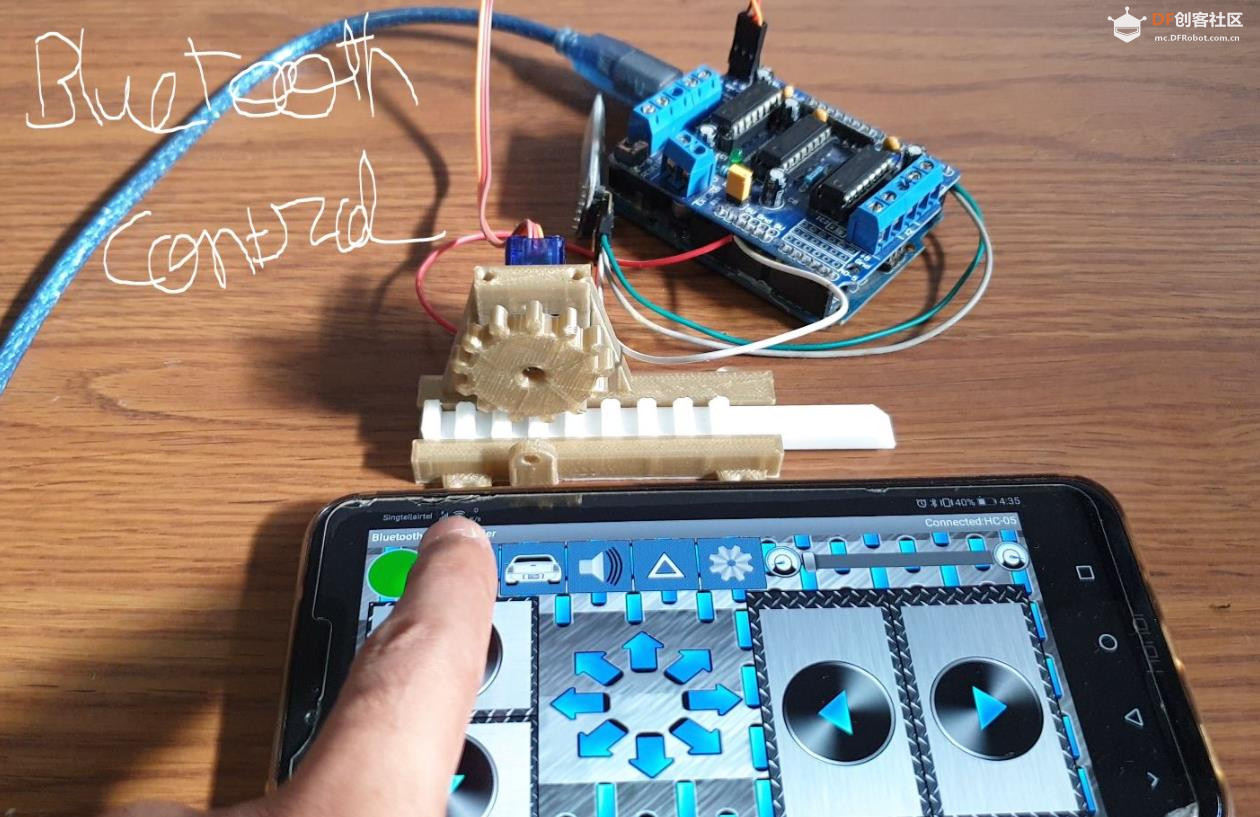  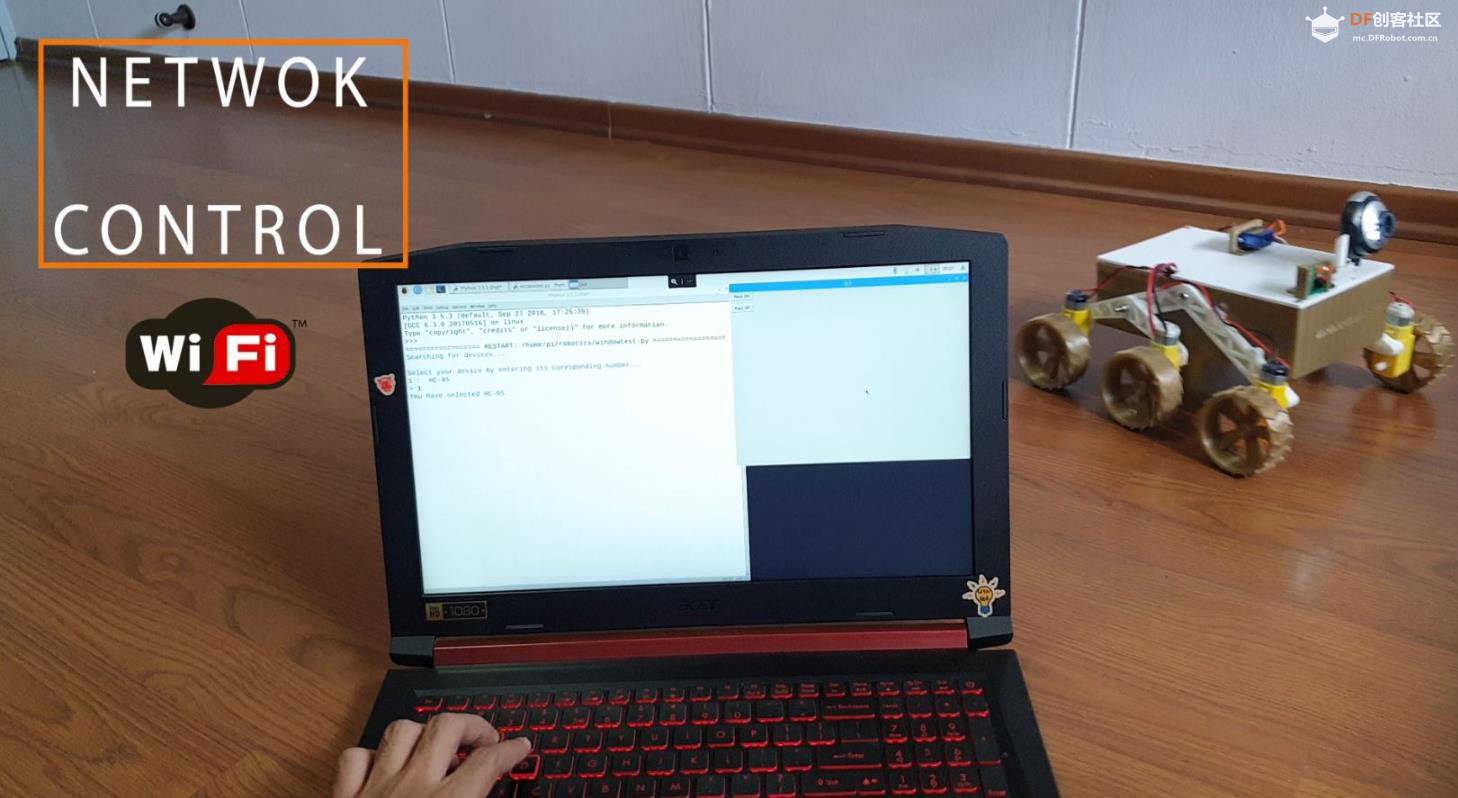 |
|
本帖最后由 驴友花雕 于 2025-6-9 05:34 编辑 附录 项目链接:https://www.instructables.com/IOT-Moon-Rover/ 项目作者:印度 shubham_bhatt 项目视频:https://www.youtube.com/watch?v=mcdEGQTxE88 Opencv 3 进行设置:https://pyimagesearch.com/2017/0 ... -your-raspberry-pi/ 配置 raspi-config:https://www.raspberrypi.com/docu ... /configuration.html 项目文件:https://github.com/sastejugaad/Chandrayaan3_Pragyan_Rover   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶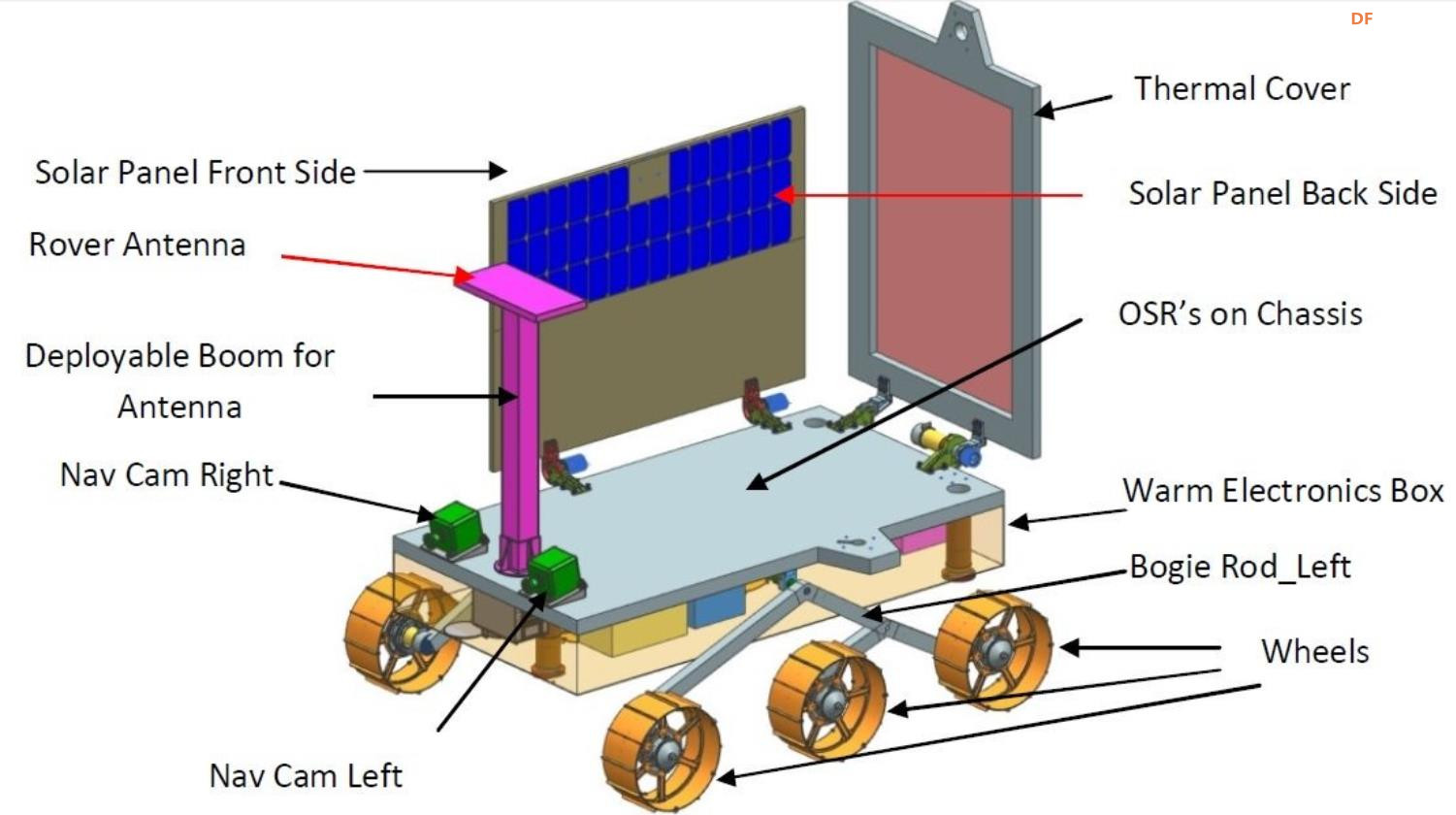


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






