|
2997| 4
|
[项目] 【Arduino 动手做】3D 打印 6+1 自由度的开源桌面机械臂 |
|
说明 RR1 拥有 6 个(6 个关节 + 1 个用于夹持器)自由度,由步进电机驱动。它是完全闭环的,也就是说,每个关节都配有独立的编码器,并且我们随时都能知道所有关节的当前角度。RR1 与其他类似项目的重要区别在于,每个关节都配备了定制的 3D 打印开环行星齿轮减速器。该机器人由两部分组成:(i) RR1 机械臂本身;(ii) 一台名为 Real Box One(简称 RB1)的控制计算机。这使得许多电子设备与机械臂分离,并支持模块化设计。 第一个原型,称为“修订版 1”,已经投入运行。第二个原型“修订版 2”正在开发中(您可以猜猜它的颜色)。由于我在“修订版 1”的组装过程中积累了丰富的经验,第二个原型“修订版 2”(橙色版本)将在很多方面得到显著改进。 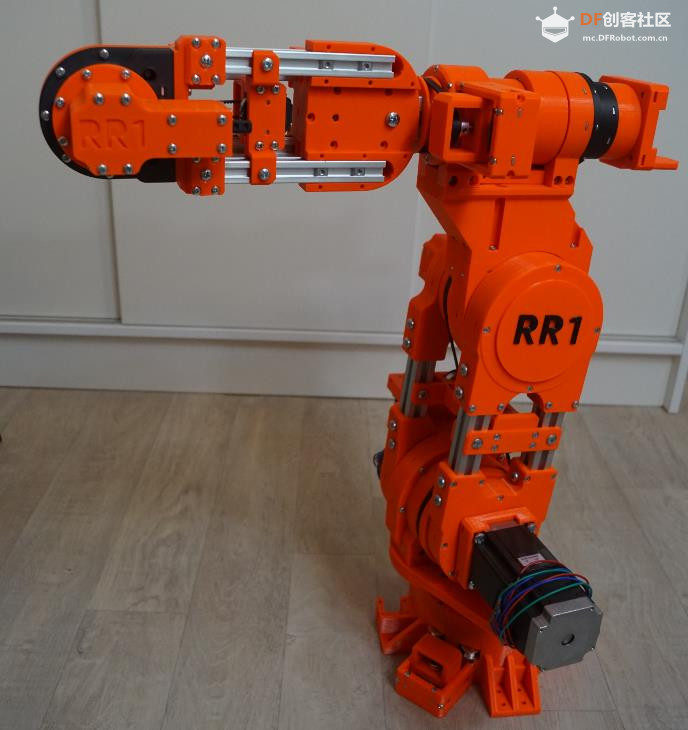  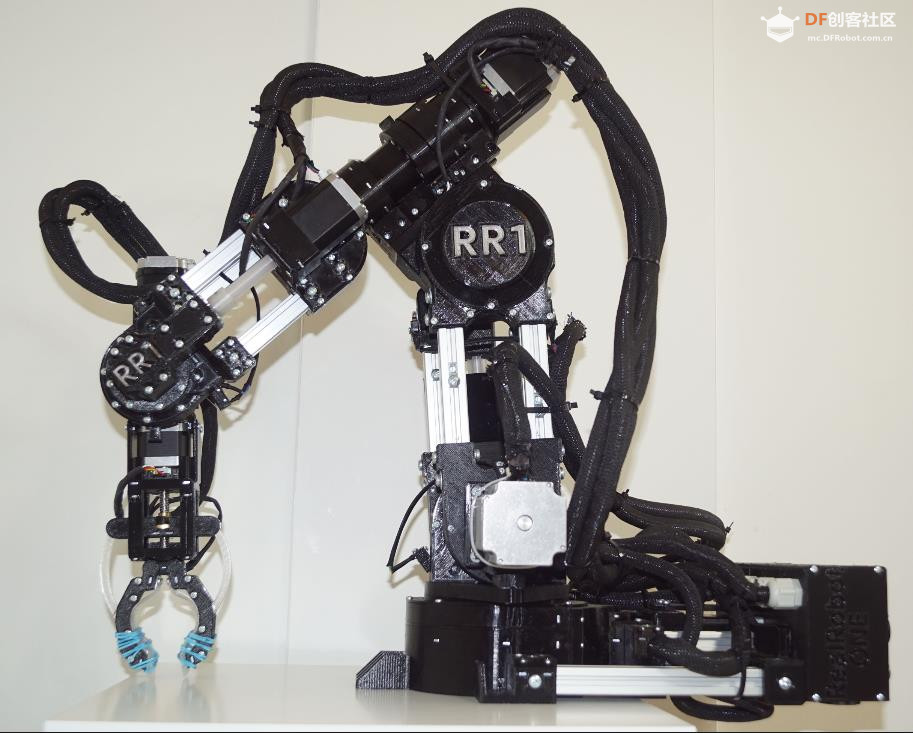 |
|
细节 RR1是一款 DIY 桌面机械臂,也是我在机器人领域的一个大项目。其整体设计理念是能够生产更多这样的机器人,从而实现桌面上的多机器人协作。我认为,在桌面上放置一个小规模的工业 4.0 机器人,对于研究和测试来说,将会非常有帮助。 机器人本身比玩具更大、功能更强大,但它不像工业机器人那样大,而且价格也不贵,所以如果您想要 10 个这样的机器人,您不需要有建造工厂的预算。 由于体积小巧,RR1 不像工业机器人那样需要封闭在难以接近的区域,因此非常适用于协作机器人。 与其他类似尺寸的机器人项目不同,RR1 不使用任何皮带传递扭矩。RR1 中的所有扭矩传递均通过齿轮完成。所有减速器均基于 3D 打印的开口环行星齿轮箱定制。每个关节都有各自的行星齿轮箱,因此整个机器人共有六个不同尺寸的类似齿轮箱。此外,还有三个锥齿轮箱用于从电机轴以 90 °角传递扭矩,这些锥齿轮箱也大部分采用 3D 打印制造。 该机器人由步进电机驱动,包括4个大型(NEMA 23)和3个小型(NEMA 17)。下部主关节由目前最大的NEMA 23步进电机(长度112毫米)驱动,产生3Nm的扭矩,连接到1:40的减速器,理论上可在主关节产生120Nm的扭矩,足以驱动机器人。 下图显示了主下关节的减速器。它是一个开口环行星齿轮箱,由三个行星齿轮(人字形齿轮)和一个连接到电机轴的中间太阳齿轮组成。减速器有两个齿圈,一个固定(橙色),一个旋转(灰色)。驱动手臂的旋转齿圈通过轴承滚珠固定在橙色前部凹槽中(图中未显示滚珠和螺栓)。 注:我经常用“行星齿轮箱”来指代开环行星齿轮箱。RR1 rev. 1 和 RR1 rev. 2 中只有开环行星齿轮箱。开环行星齿轮箱的优势在于可以实现更高的减速比。 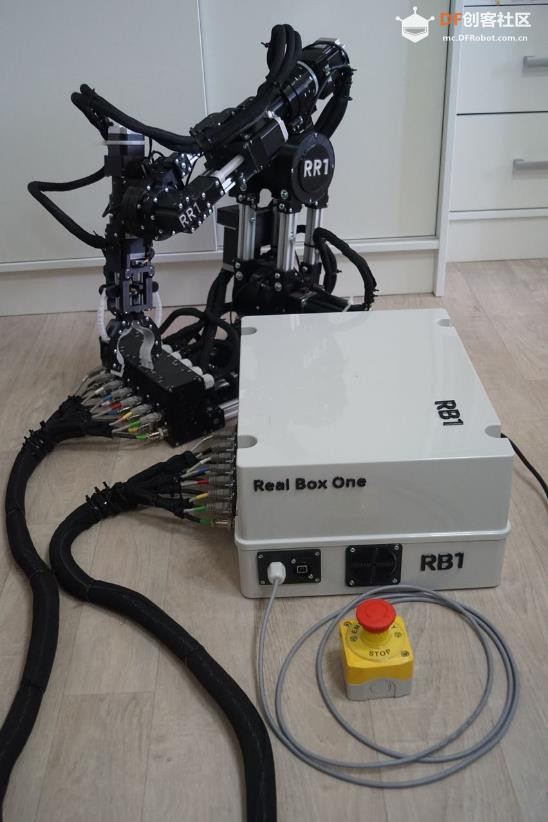   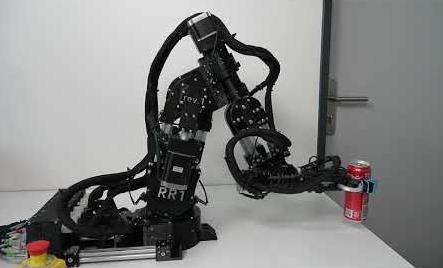 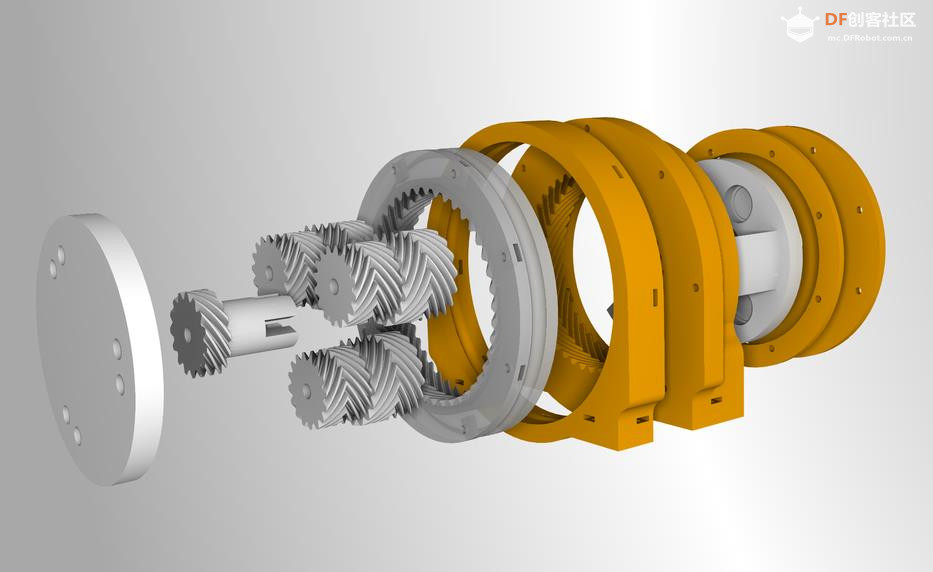   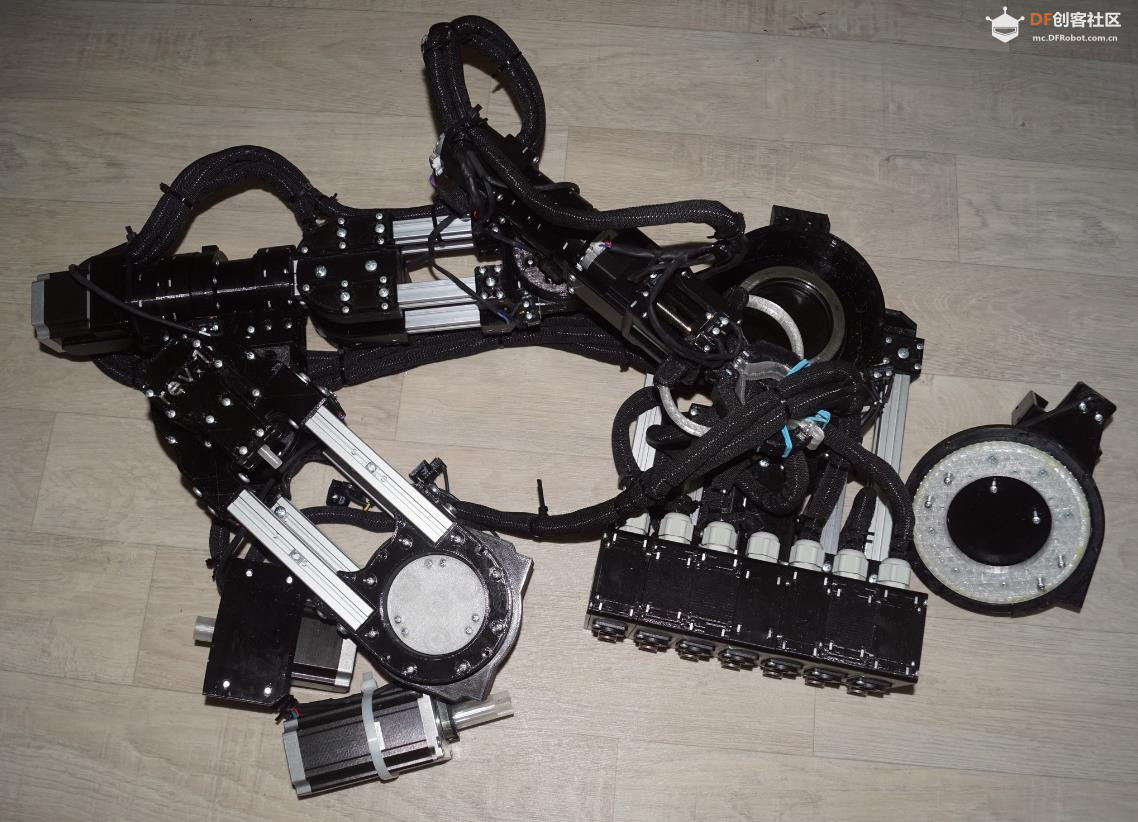  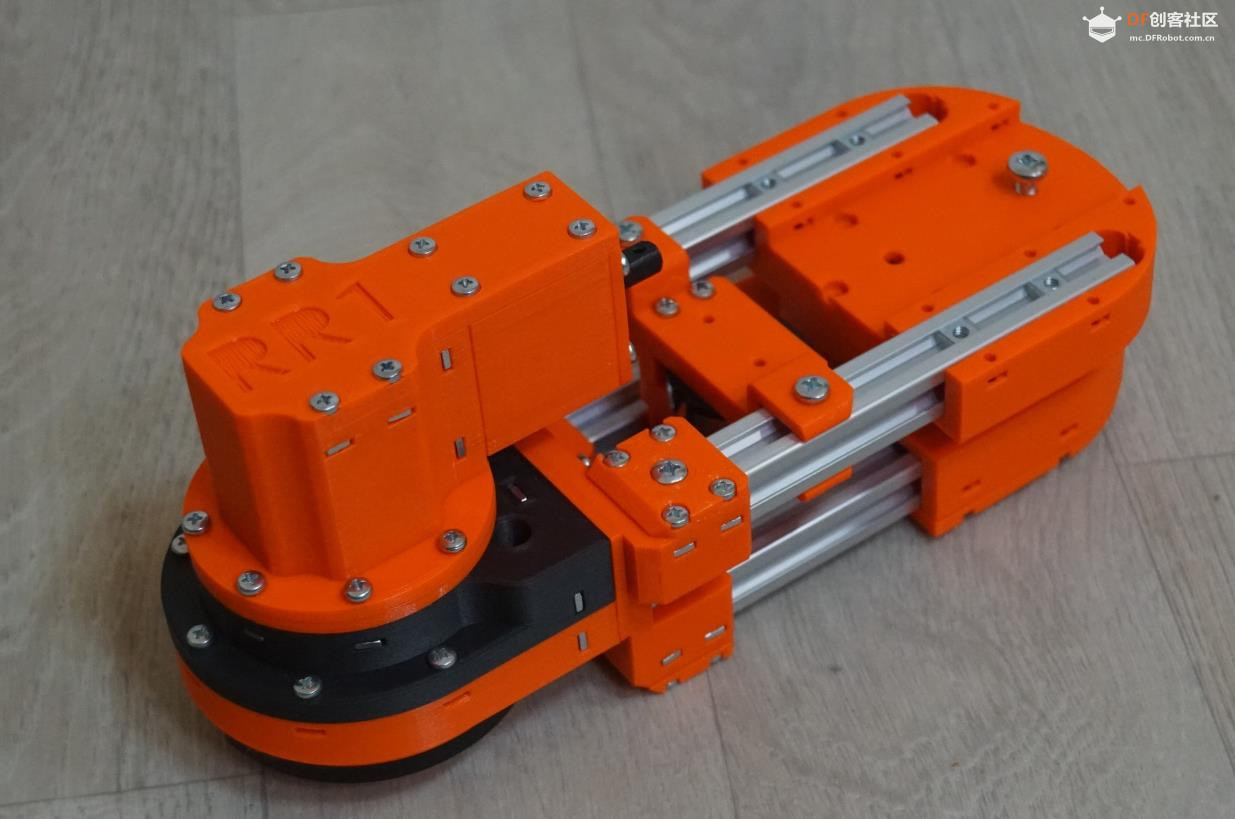 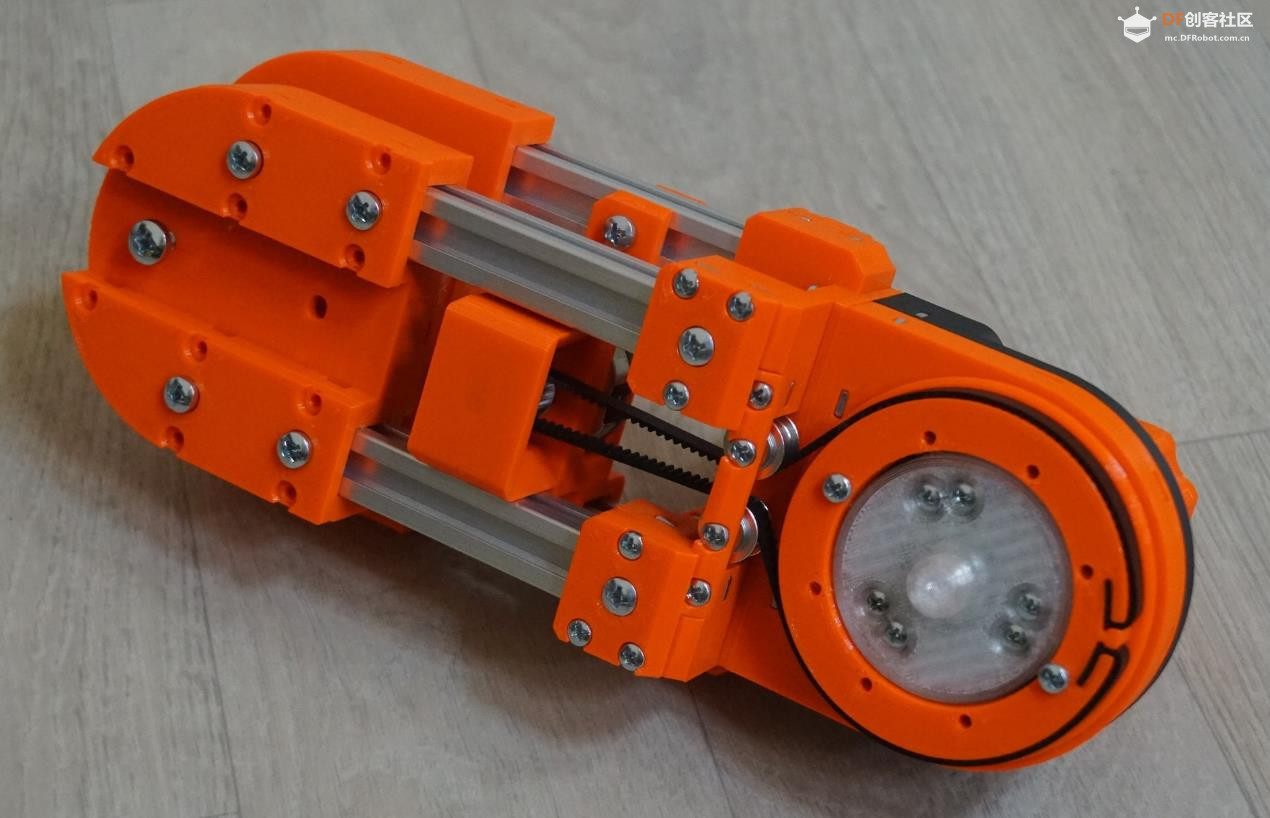   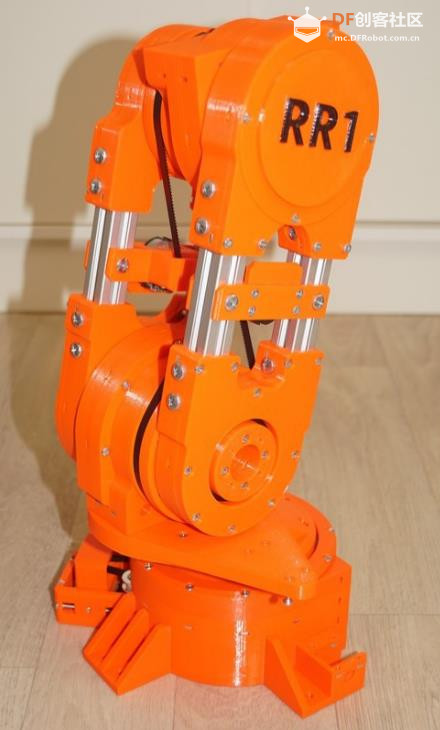 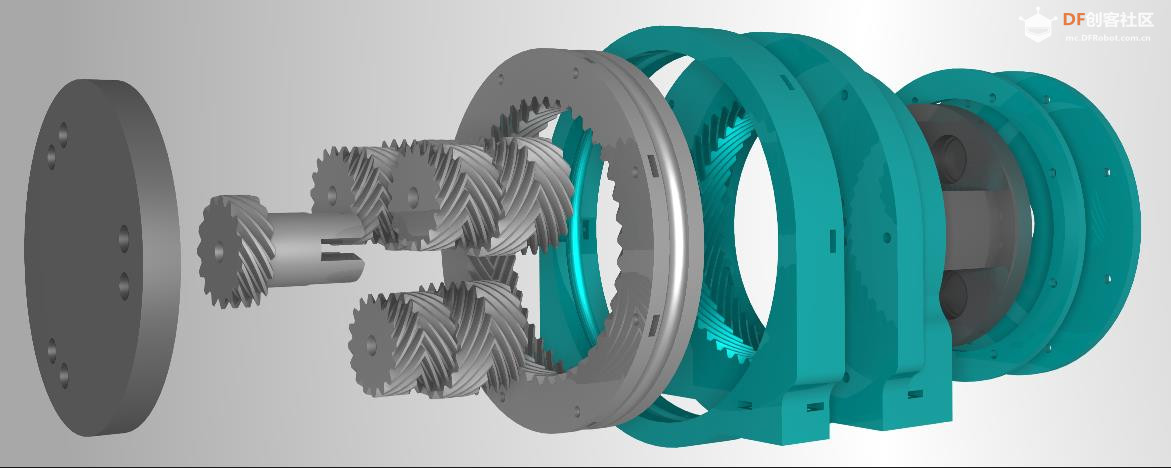   |
|
以下视频展示了如何用3D打印零件组装开口环行星齿轮箱。组装过程注重平稳旋转和消除齿隙,是一项极具挑战性的任务。 该机器人目前以首个原型的形式存在,称为“修订版 1”(revision 1),简称“rev. 1”。“rev. 1”的关节仍然存在一些间隙,我希望在“rev. 2”中消除这些间隙(在上面的视频中,我们确实实现了几乎为零的间隙)。重复性仍在改进中。 更新:以下视频展示了主肩关节行星齿轮箱断裂的手术和分析。此次损坏发生在2023年布拉格创客博览会期间。此次损坏为未来的设计提供了重要的借鉴,并将在“rev.2”中体现。 对第一个原型“rev. 1”进行的测试和发现发布如下。第一个测试名为“可口可乐测试”,重点考察机器人的灵活性,该测试使用了机器人的所有六个关节以及一个夹持器。RR1 正在举起 330 毫升可口可乐并模拟倒酒。罐子是满的,对于机器人的夹持器来说,罐子有点滑。夹持器上的蓝色橡皮筋具有防滑效果,可以缓解这种情况。看来我应该在夹持器的下一个版本(Rev.2)中添加更多防滑组件,这样就可以不用再使用橡皮筋了。 接下来是另一个展示机器人关节运动的视频。该测试还将重点检查所有电缆是否足够长,以允许手臂旋转。 我还做了一些初步的举重测试,其中 RR1 举起了一根水杠铃。我想知道这个机器人能否举起 1 公斤的杠铃——理论上应该可以。以下视频展示了测试过程。下一个视频展示了运动测试…… 下一个视频是完整的1公斤杠铃测试(刺猬索尼克也被机器人抓住了)。正如视频所示,RR1能够用其抓手举起1公斤的重物,也就是用手腕。看来我们能够达到预计的2公斤有效载荷。测试还发现了一些需要在Rev.2中修复的缺陷:抓手的抓力相对较弱,杠铃可能会滑出。我们用蓝色橡皮筋增加了抓力。 这里有一个较短的视频,展示了如何举起 1 公斤的重物,但没有“拯救刺猬索尼克”的场景(以防你不喜欢看到索尼克被机器人伤害): 我已经在组装“Rev. 2”了,它将包含许多改进,其中最显著的改进是行星齿轮减速器,几乎没有齿隙。Rev. 2 还将采用不同的底座,其机械臂将像工业机器人一样偏心前移,使机器人的工作空间更加自然。       |
|
下表显示了适用于修订版 1 的机器人规格: RR1规格 大量的: 14kg(臂)+8kg(控制箱) 抵达: 约80厘米 重复性: 仍在改善 有效载荷: 2公斤 材料: PETG、铝挤压件、金属轴承 执行器: Nema 23 和 Nema 17 步进电机 Reducers: 3D打印定制行星齿轮减速器 电子产品: Arduino Due 步进驱动器: 7个DM556 项目链接:https://hackaday.io/project/1859 ... desktop-robotic-arm 项目作者:保罗·苏里内克 项目视频 :https://www.youtube.com/watch?v=EfE1ga313Wc https://www.youtube.com/watch?v=io-sbDWiQgs https://www.youtube.com/watch?v=d3VVTlRikv4 https://www.youtube.com/shorts/0FcJEWKSMd0 https://www.youtube.com/watch?v=dfgdf9NopjM&t=2s https://www.youtube.com/watch?v=XQoW3ySDIKk&t=3s https://www.youtube.com/watch?v=W-YEc6eXgU4&t=3s https://www.youtube.com/watch?v=4bKfoBwomMM https://www.youtube.com/watch?v=gqhaFNvL9V0 项目代码:https://github.com/surynek/RR1/tree/main 3D 文件:https://github.com/surynek/RR1/tree/main/rev.2/CAD    |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶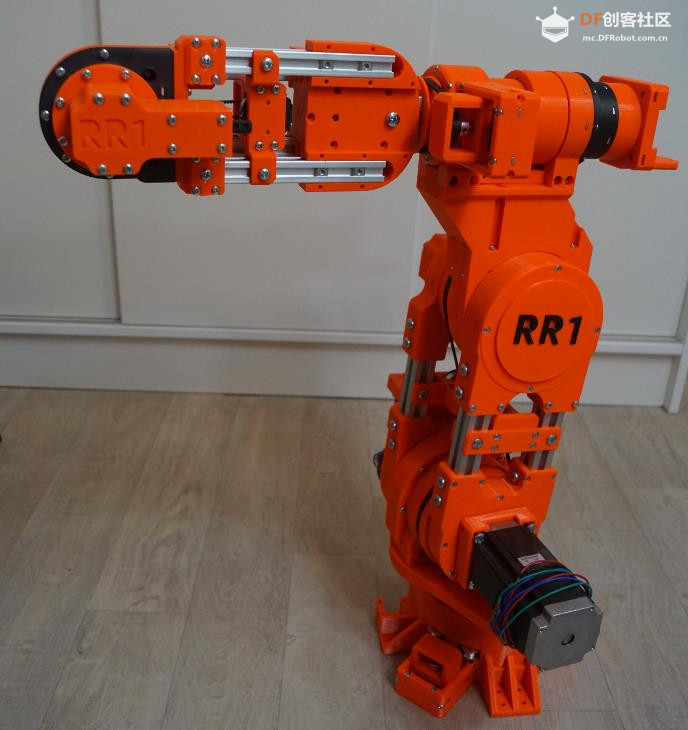

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






