|
1647| 4
|
[项目] 【Arduino 动手做】尝试并联结构 Delta 制作双足机器人的腿 |
|
RUU结构由驱动器、主动杆、上部Hulk铰链、从动杆、下部Hulk铰链组成,从上到下固定在脚球上。六个驱动部件,六个大扭矩舵,安装在顶部底座上,构成一个完整的结构。 1 - 基座部分,2a 3a 4a - 驱动装置(高扭矩舵),2b 3b 4b - 主动杆(舵架) 2c 3c 4c - 铰链(Wan-Hinge 节),2d 3d 4d - 棒 2e 3e 4e* - 铰链(Wan-Hinge 节),5 - 球 * - 块体以一定角度固定 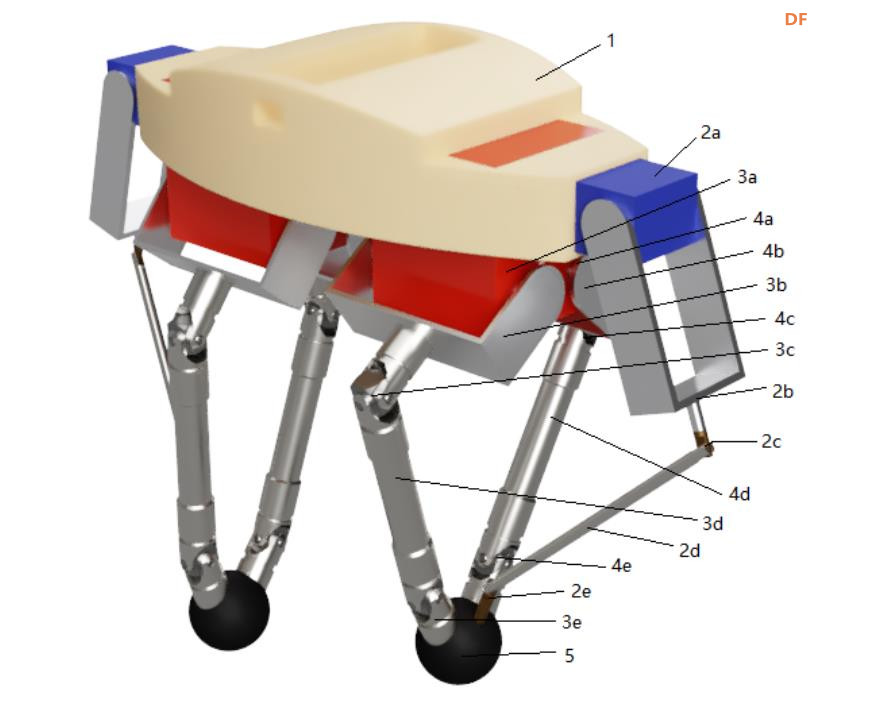 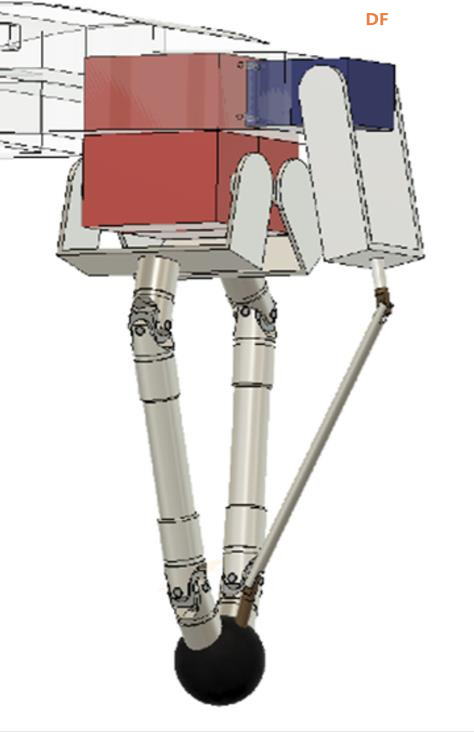 |
|
为了方便制作,双足机器人底座采用3D打印,驱动市售的60kg和18kg大扭矩串联舵机,绿巨人铰链采用可以购买的10mm和4mm魔杖改造,腿部骨架采用空心钛合金管制成,以减少活动部分的惯性,脚球采用高弹性聚氨酯橡胶球。 控制板是 Curie Nano,基于英特尔 Curie 模块设计,并与 Arduino 101 兼容。该模块由 x86 Quark 核心和 32 位 ARC 架构核心组成,内置蓝牙 4.0 和 6 轴姿态传感器。体积小巧,功能强大,非常适合用作双足机器人开发板。 利用控制板内置的蓝牙功能实现与手机的双向通讯,手机控制双足机器人动作,并反馈机器人姿态数据。 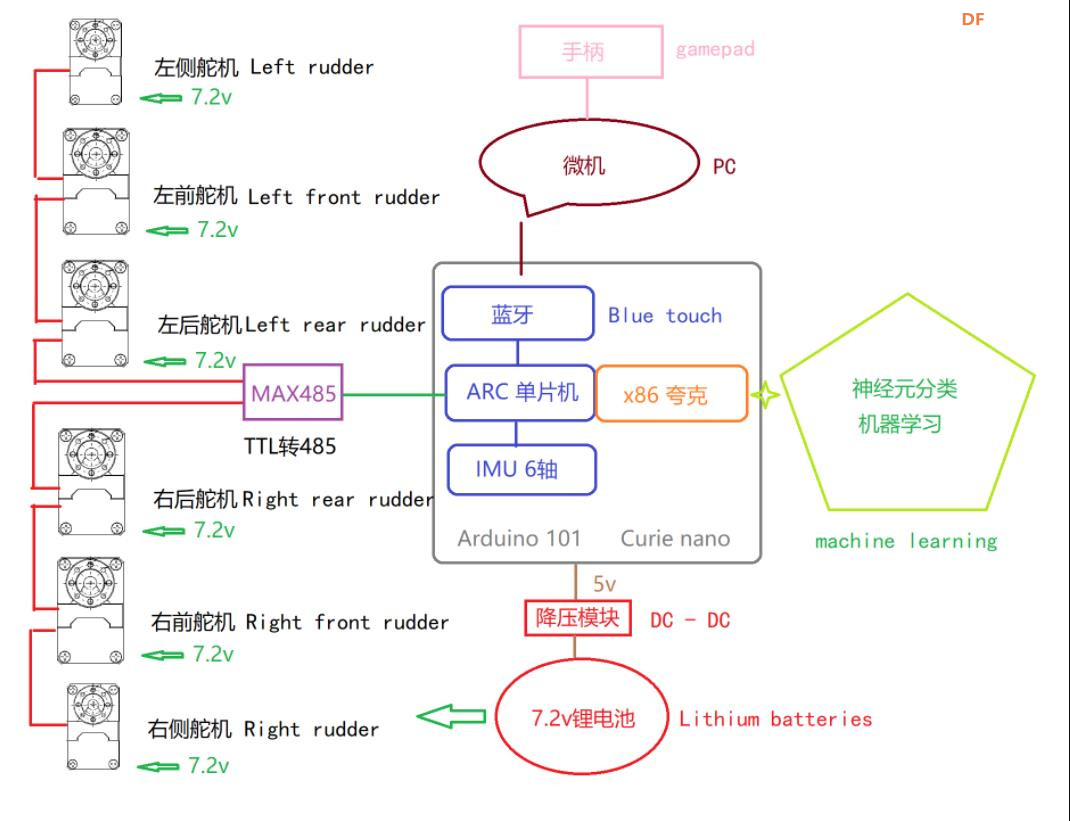  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶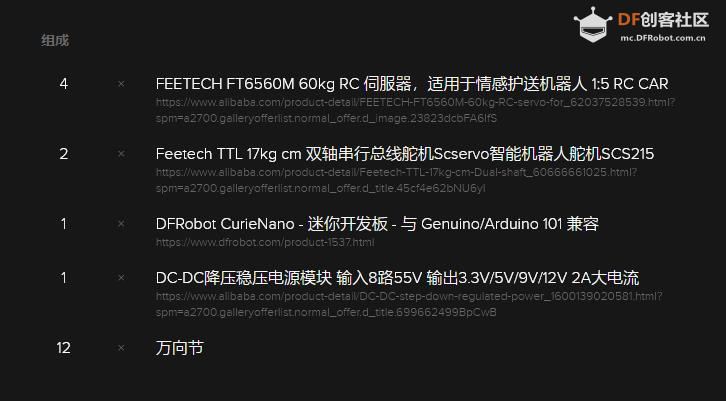

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






