|
1170| 1
|
[项目] 【Arduino 动手做】六舵机自平衡 Rotary Stewart 平台 |
|
面向学生的 Rotary Stewart 平台。 有时,创造就是唾手可得的果实。我已经有一个 Rotary Stewart Platform (http://www.thingiverse.com/thing:64396),而且我对 Kerbal Space Program 很感兴趣。我想如果我能制造一个 6DOF纵杆,也许我可以在轨道交会方面做得更好。也许它也可以在 Minecraft 或 Descent 中工作。 如果您使用我的设计之一,请告诉我!我很想看看你用它做了什么,并与其他感兴趣的人分享。 如果有人能帮助改进这个机器人的运动学,那就太好了。正向运动学超出了我的数学技能,它们对于使纵杆完整至关重要。 • 从https://www.marginallyclever.com/获取零件套件或激光切割此设计。您将需要两个帧、一个末端执行器 1 和三个末端执行器 2。 • 获得三个 TAMIYA 70171 套件。将 M3 棒切成两半。 • 修改舵机:拆下 PCB,将电位计直接连接到电缆上。 • 按照你在图片中看到的组装。完成后,您将有一个额外的末端执行器板。使用额外的 M3 杆将两个框架板夹在一起,将伺服器固定到位。 • 上传固件 • 从一个 Stewart 平台驱动另一个平台 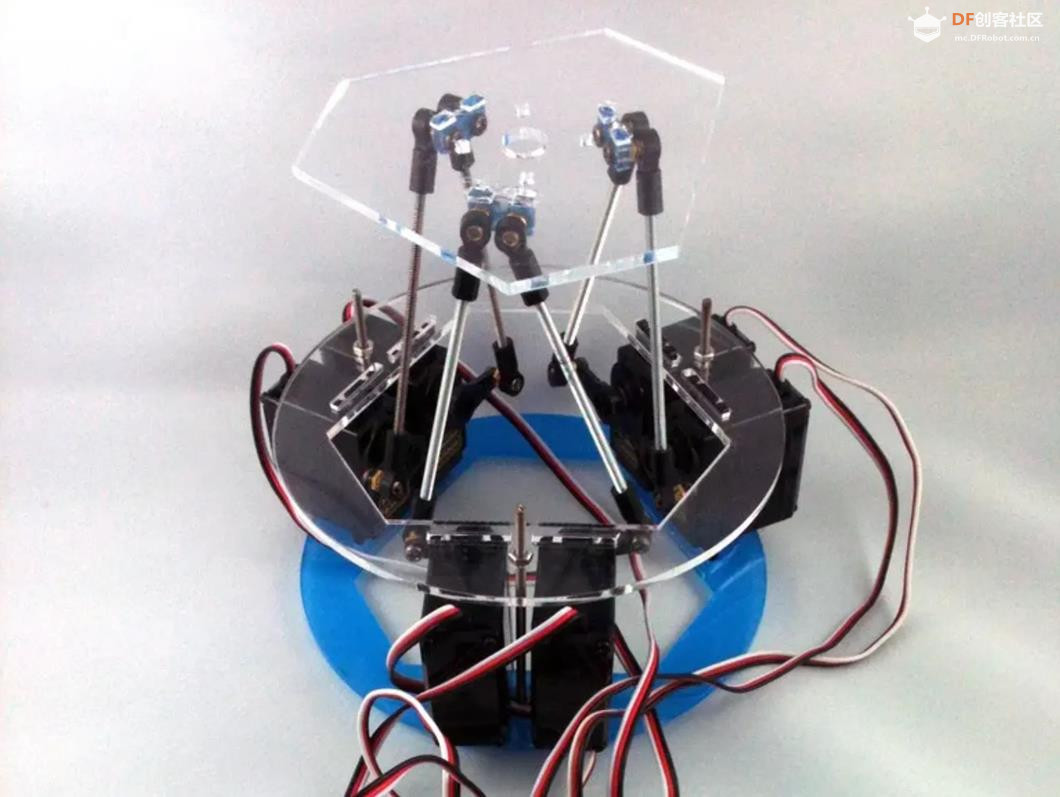 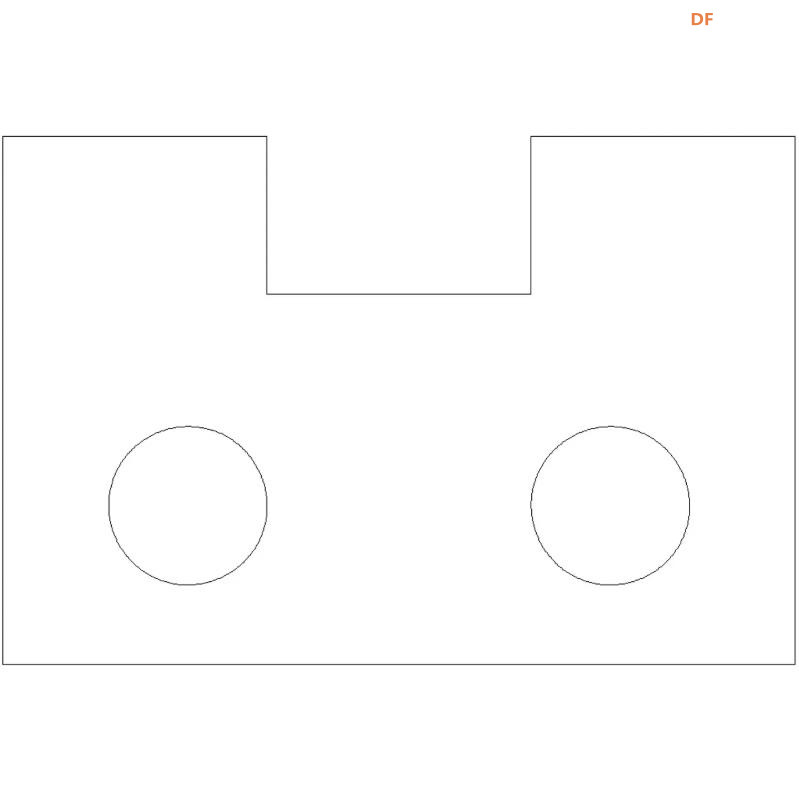 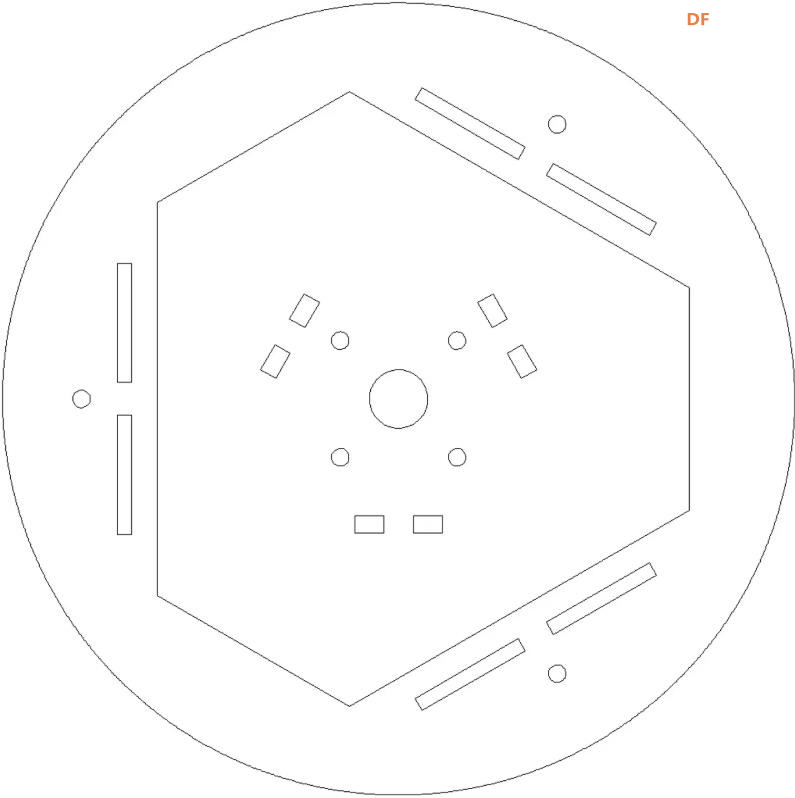 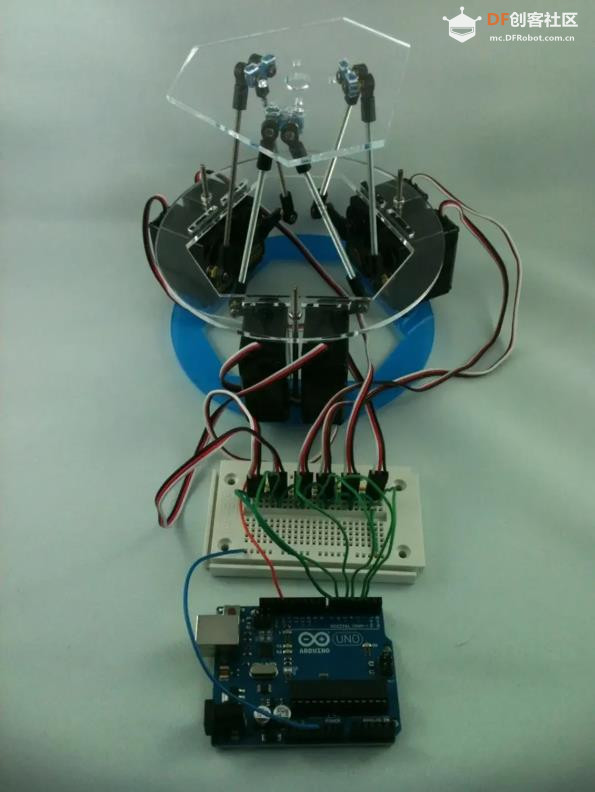 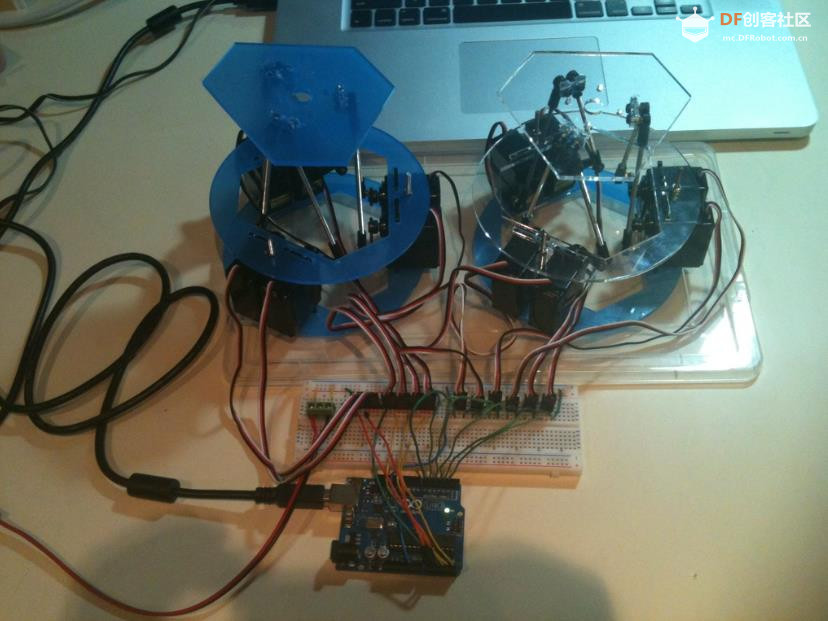 |
|
附录 【Arduino 动手做】六舵机自平衡 Rotary Stewart 平台 项目链接:https://www.printables.com/model ... stewart-platform-v1 项目作者:丹·罗耶 参考资料:https://www.marginallyclever.com/ 项目视频 :http://www.youtube.com/watch?v=rhuM6Cnn5Pk 项目代码:https://github.com/MarginallyClever/RotaryStewartPlatform/ 3D 文件:https://www.thingiverse.com/thing:64396 https://www.printables.com/model ... t-platform-v1/files  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






