|
10729| 7
|
[入门教程] PPM Motor Driver Module PPM直流电机驱动模块使用测试 |
最近在王大师的“蛊惑”下,报名参加了DFROBOT的2KG的格斗机器人大赛。作为赛事的主办方DFROBOT提供给了前30的报名队伍一块电机驱动板和2个电机和轮子的福利。其中电机驱动板是DFROBOT,专门为了这次2KG的格斗机器人大赛准备的。就是下图这货!!!!!!!PPM Motor Driver Module PPM直流电机驱动模块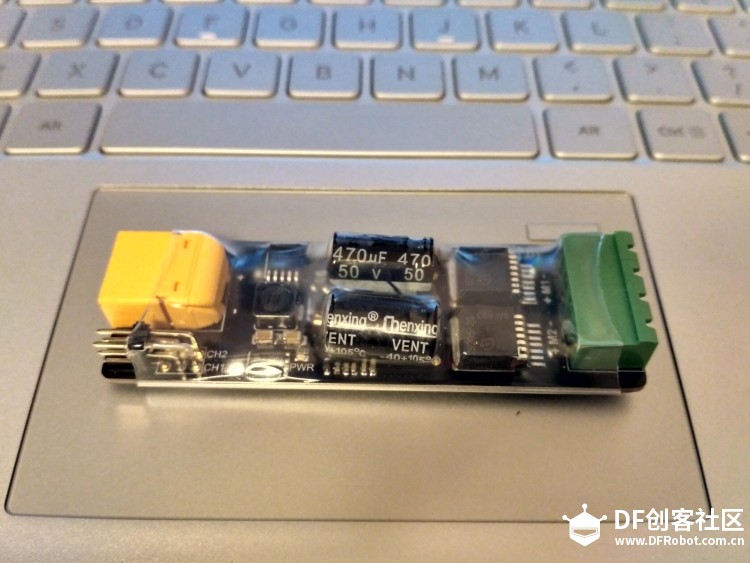  这款电机驱动模块是一款用PWM信号驱动的电机驱动,使用TLE5205-2S作为驱动芯片,芯片的最高电压为40V,超过40V会损坏芯片,持续输入低电平时,其单向持续带载为4A,超过4A会有过流保护。板上设有两个PWM信号接收通道(CH1,CH2),能接收频率为50Hz,占空比在5%~10%的PWM驱动信号。其主要工作原理是让STM8S105芯片将50Hz的PWM信号映射为频率约1000Hz,占空比在0%~100%范围的PWM信号并输出,从而驱动TLE5205-2S芯片。 通过控制PPM直流电机驱动模块的PWM控制信号的周期和高电平持续时间可改变电机的工作状态、转速以及其方向。 科普一下:PWM和PPM(其实我也不是很清楚,只是粗劣的了解,借此机会也学习一下) PPM=脉位调制 用调制信号控制脉冲序列中各脉冲的相对位置(即相位),使各脉冲的相对位置随调制信号变化。此时脉冲序列中脉冲的幅度和宽度均保持不变。 主要特征参数:相位。 PWM=脉宽调制, 用调制信号控制脉冲序列中各脉冲的宽度,使每个脉冲的持续时间与该瞬时的调制信号值成比例。 主要特征参数:频率、占空比、相位 PWM改变电机状态的原理是: PWM的输出电压有效值与占空比紧密相关,计算公式是:Vo=Vcc*r,r=占空比,如占空比是20%,Vcc=5V,则输出电压的有效值是1V,直流电机在不同的电压下运行速度是完全不同的,基本上占空比越大,速度越快,如果是100%,VCC又是额定电压的话,电机将全速运行。 从以上特征参数的对比中可以看出,两者的交集就是相位。上面说了这么多能看懂都少就看懂多少,毕竟我们只是来使用的。 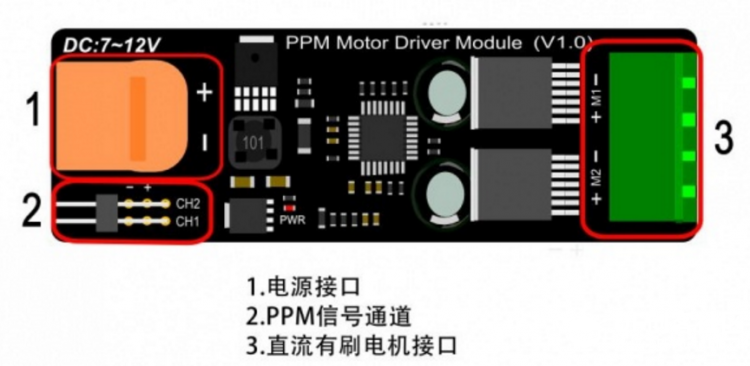 先看下板子接口,后面方便使用。 控制信号输入() PPM Motor Driver Module电机驱动板支持2路独立直流电机驱动,驱动信号从CH1和CH2输入,分别对应M1和M2电机驱动输出。由于王大师提供的电机还在路上,所以先用之前买的小车做个测试。 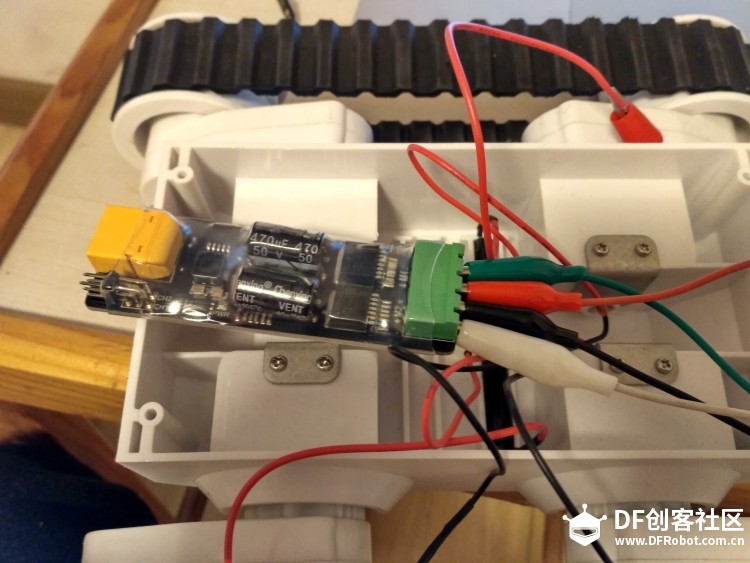 CH1、CH2可直接与航模遥控器的接收机相连(如WFLYE-07航模遥控器),也可以通过Arduino控制器输出PPM信号进行控制(这个暂时就不用了)。注:PPM Motor Driver Module提供了5V电源输出,在连接航模遥控器接收机时,不需要外接5V电源。 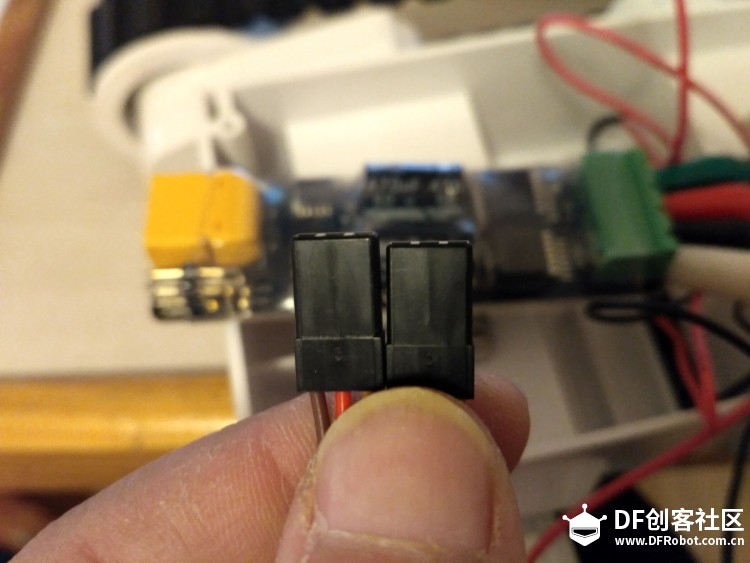 接收器与电机驱动模块的连接线是这样子的哦。 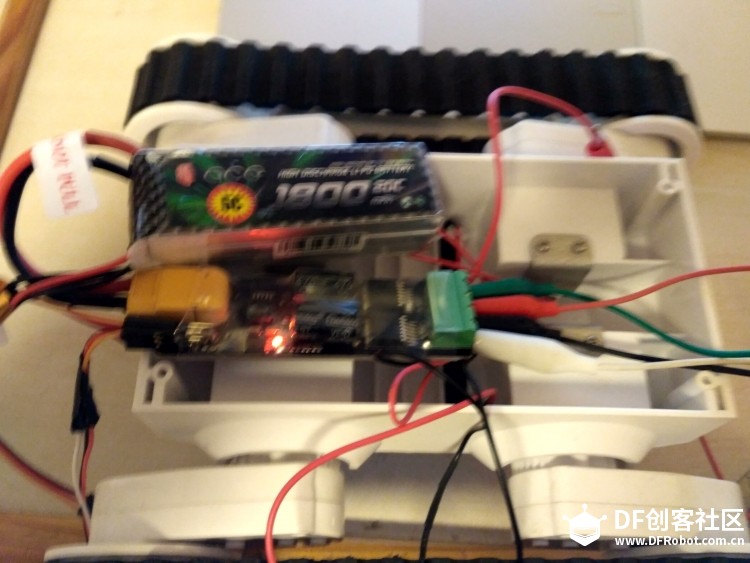 上电池 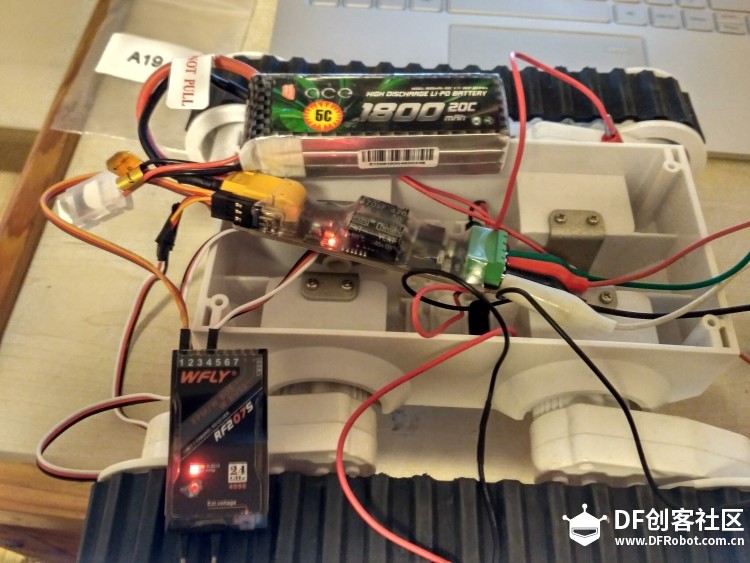 上接收器  调整遥控器到PPM 以上工作做好以后就可以愉快的玩耍了。视频如上。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






