|
1182| 7
|
[项目] 【花雕动手做】36V500W有霍尔6.5寸轮毂电机之驱动方案 |

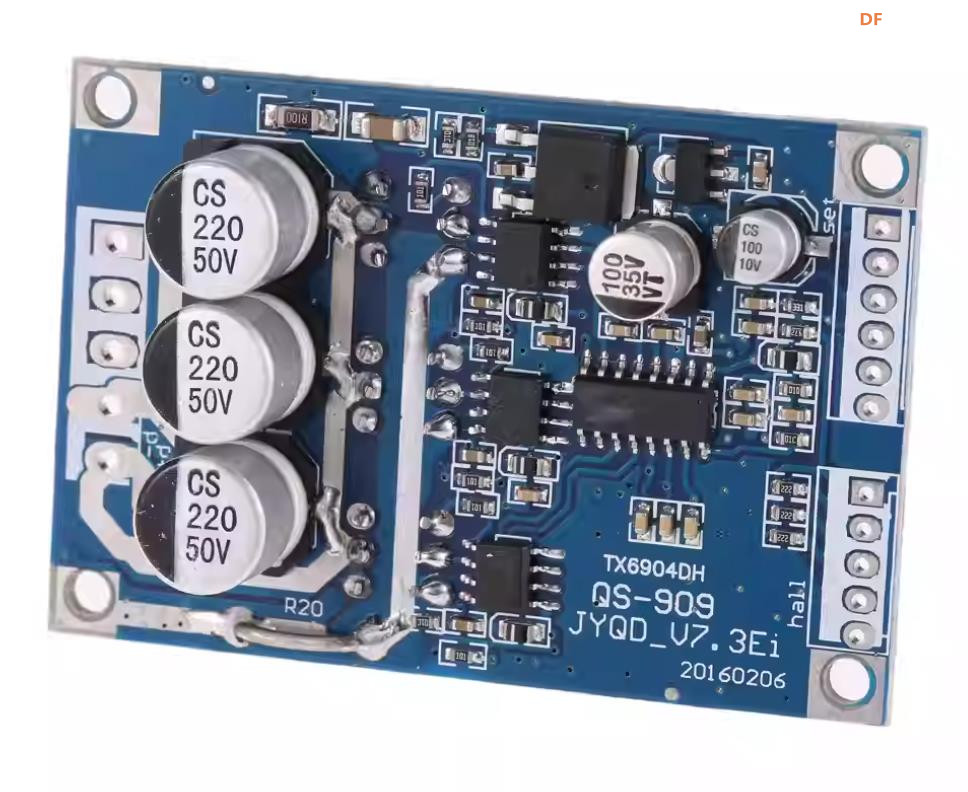
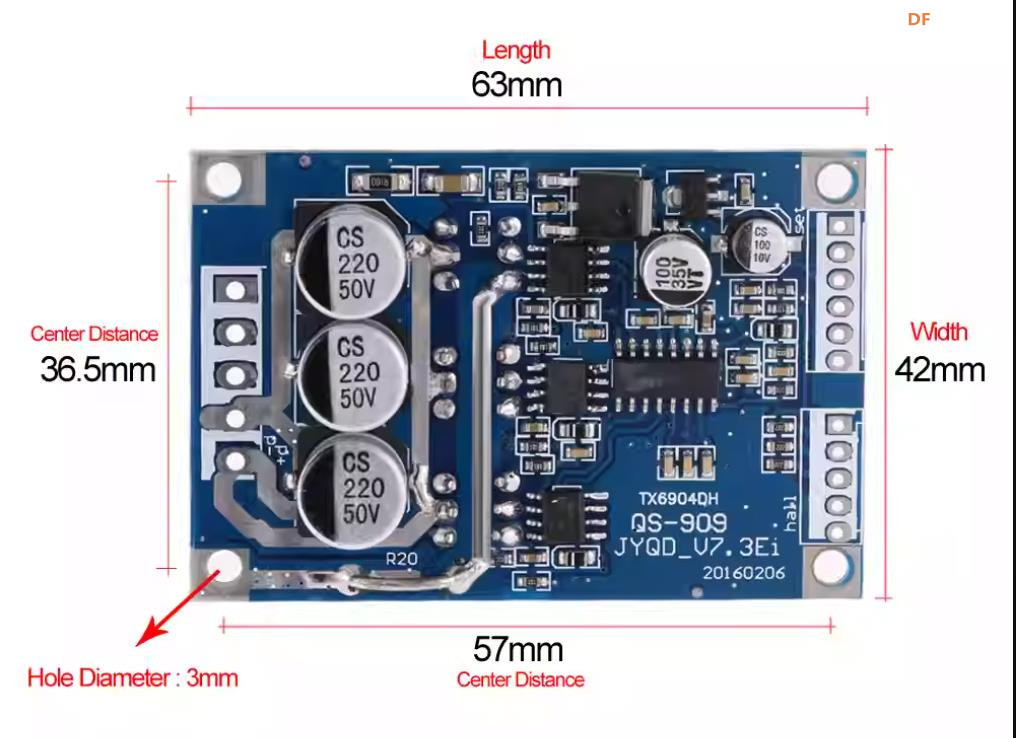
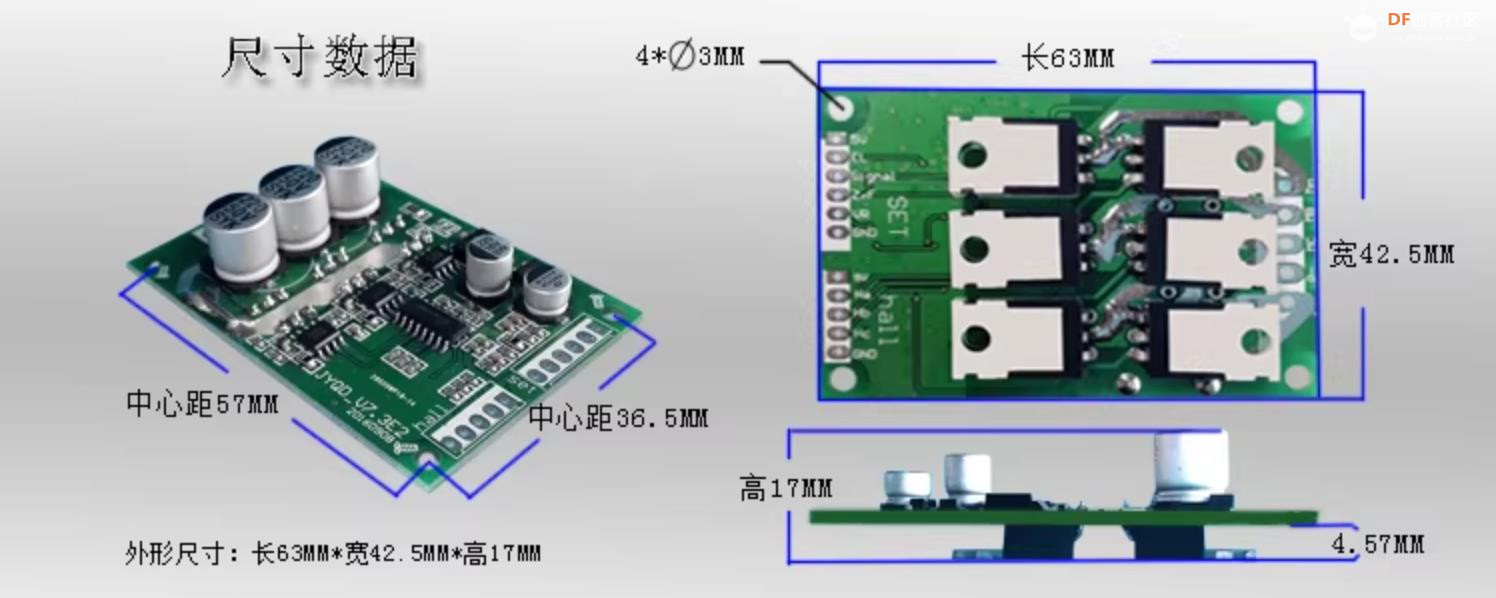
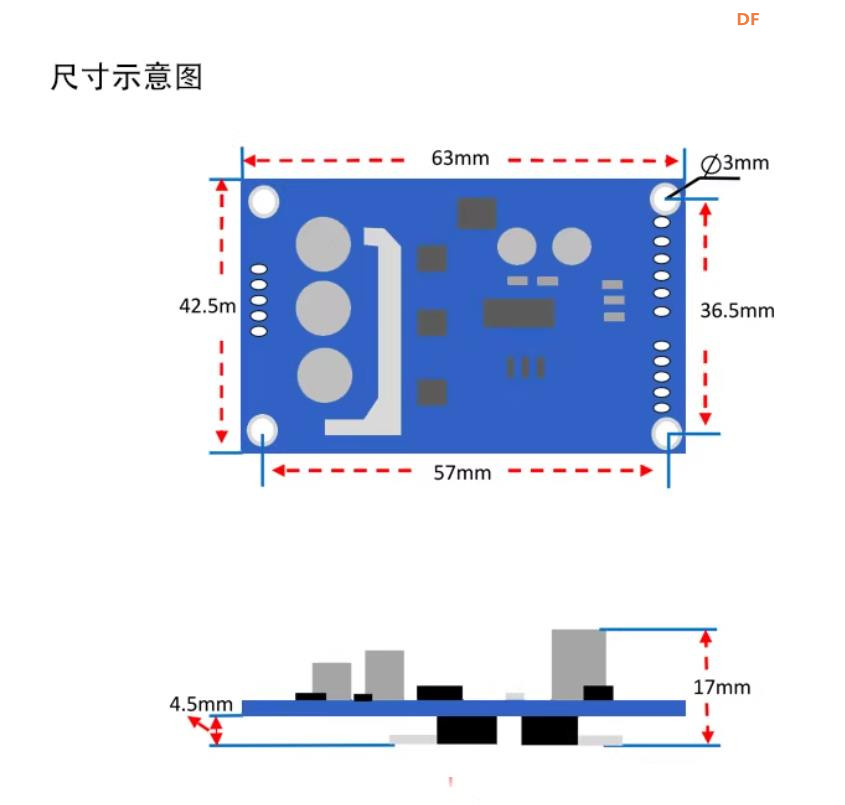
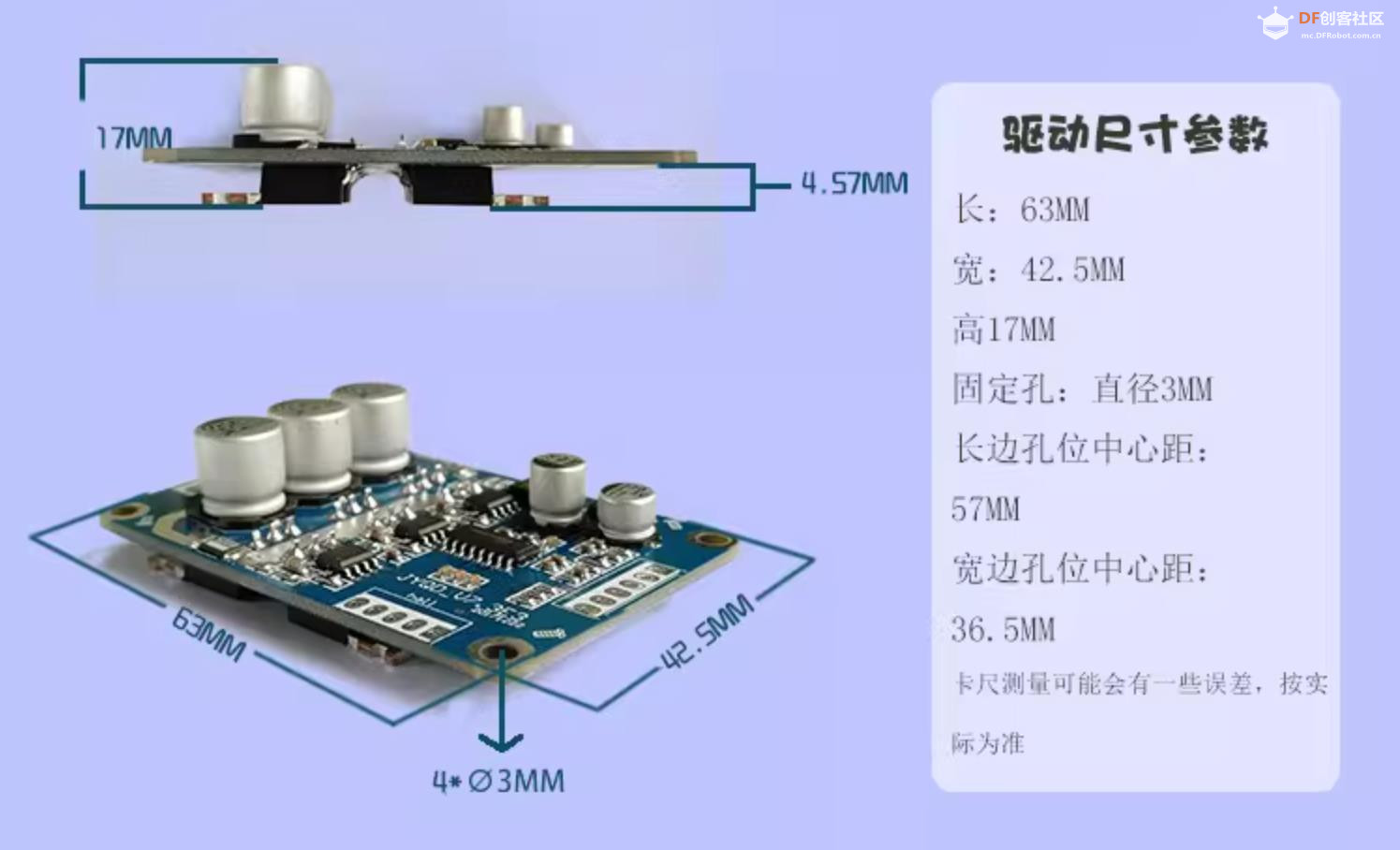
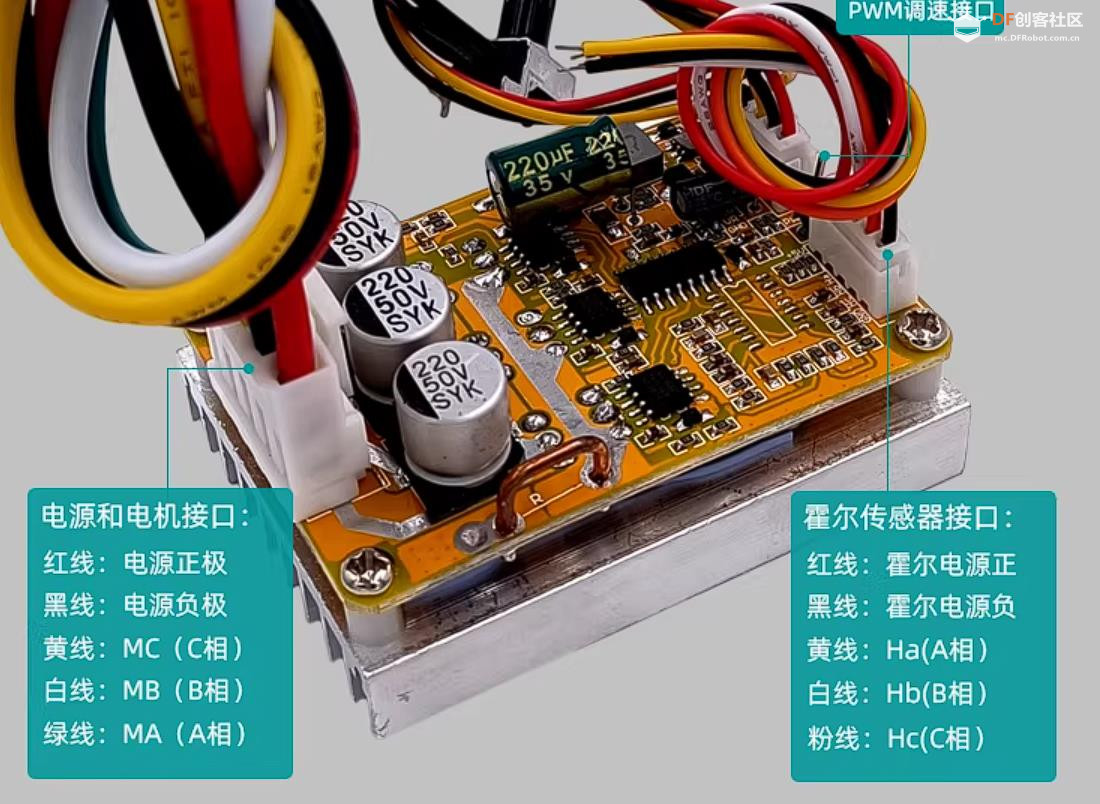
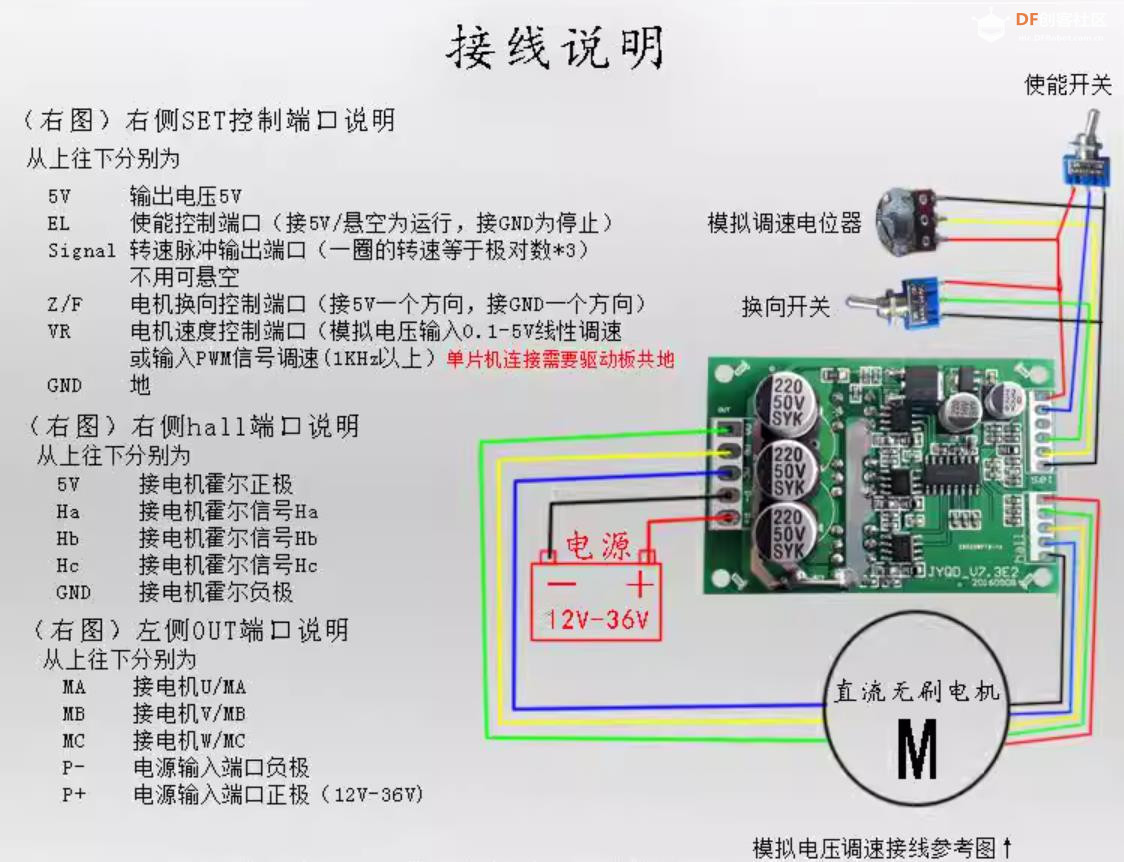
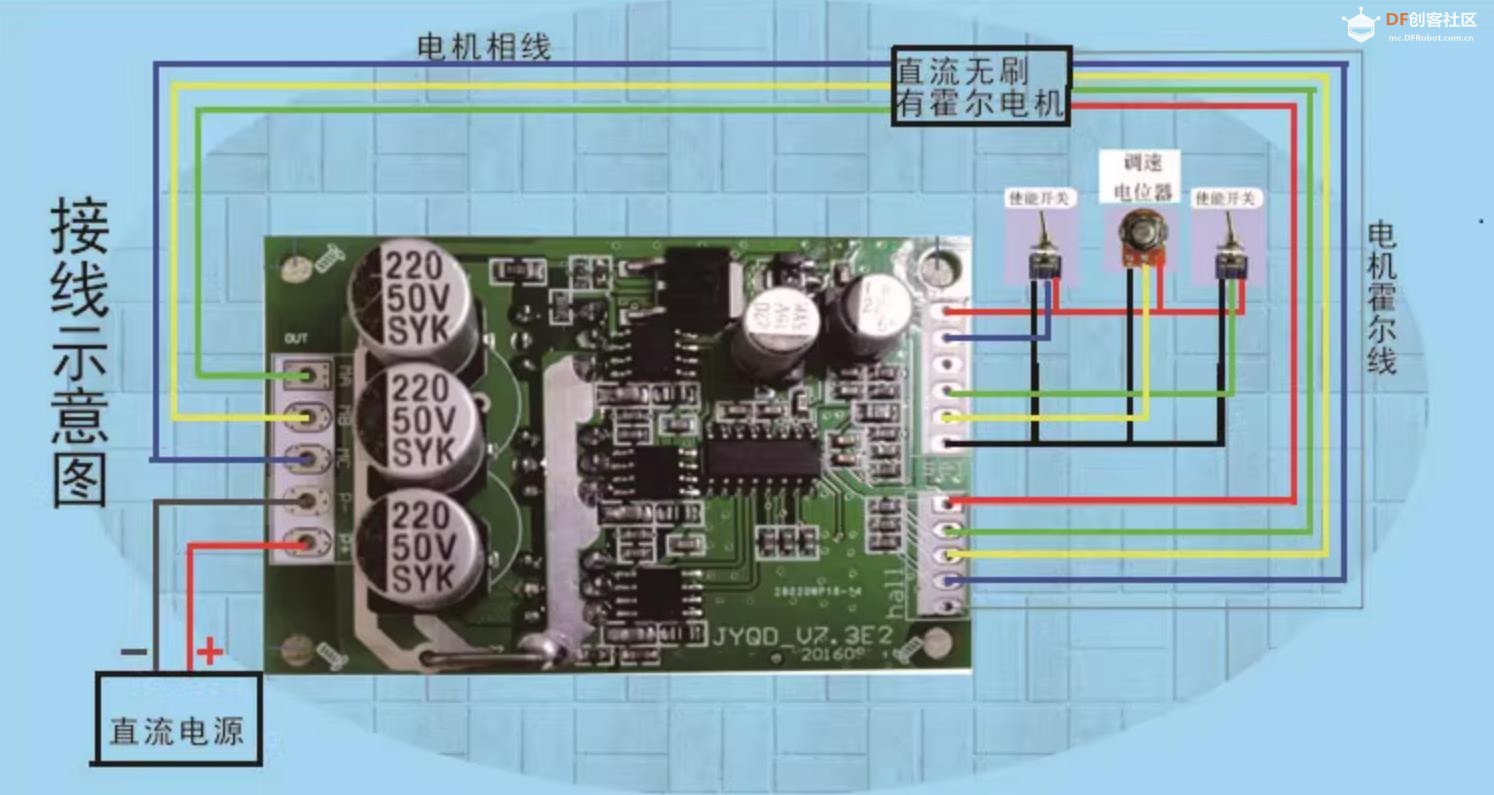
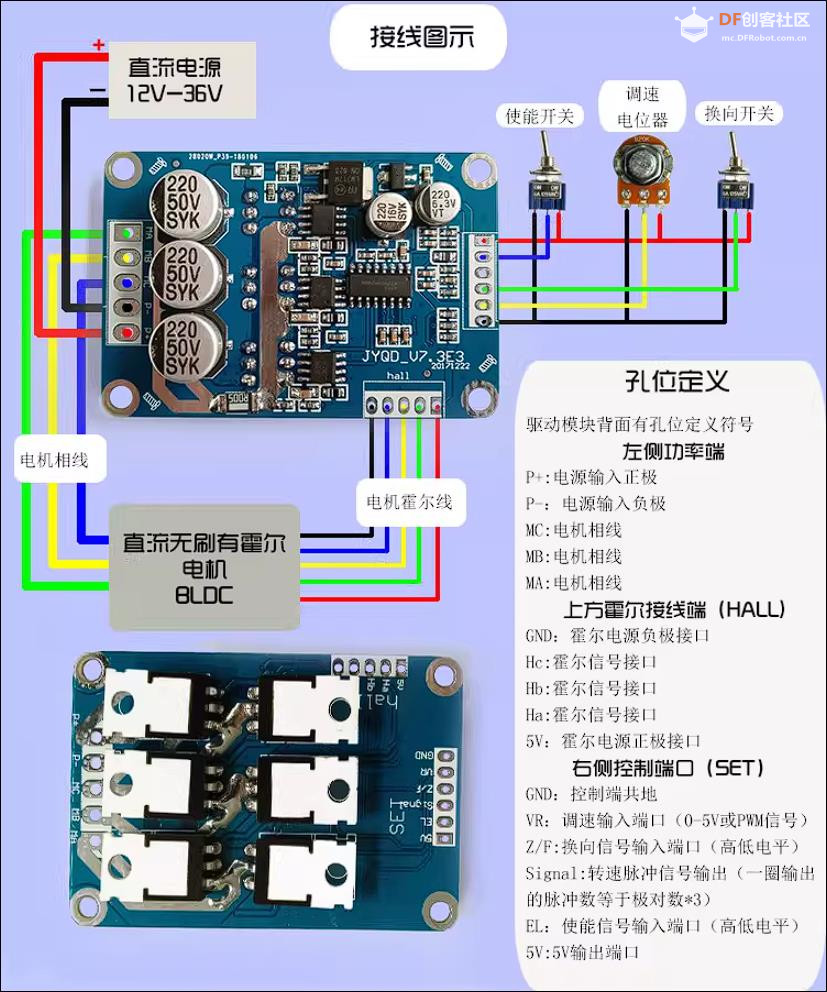
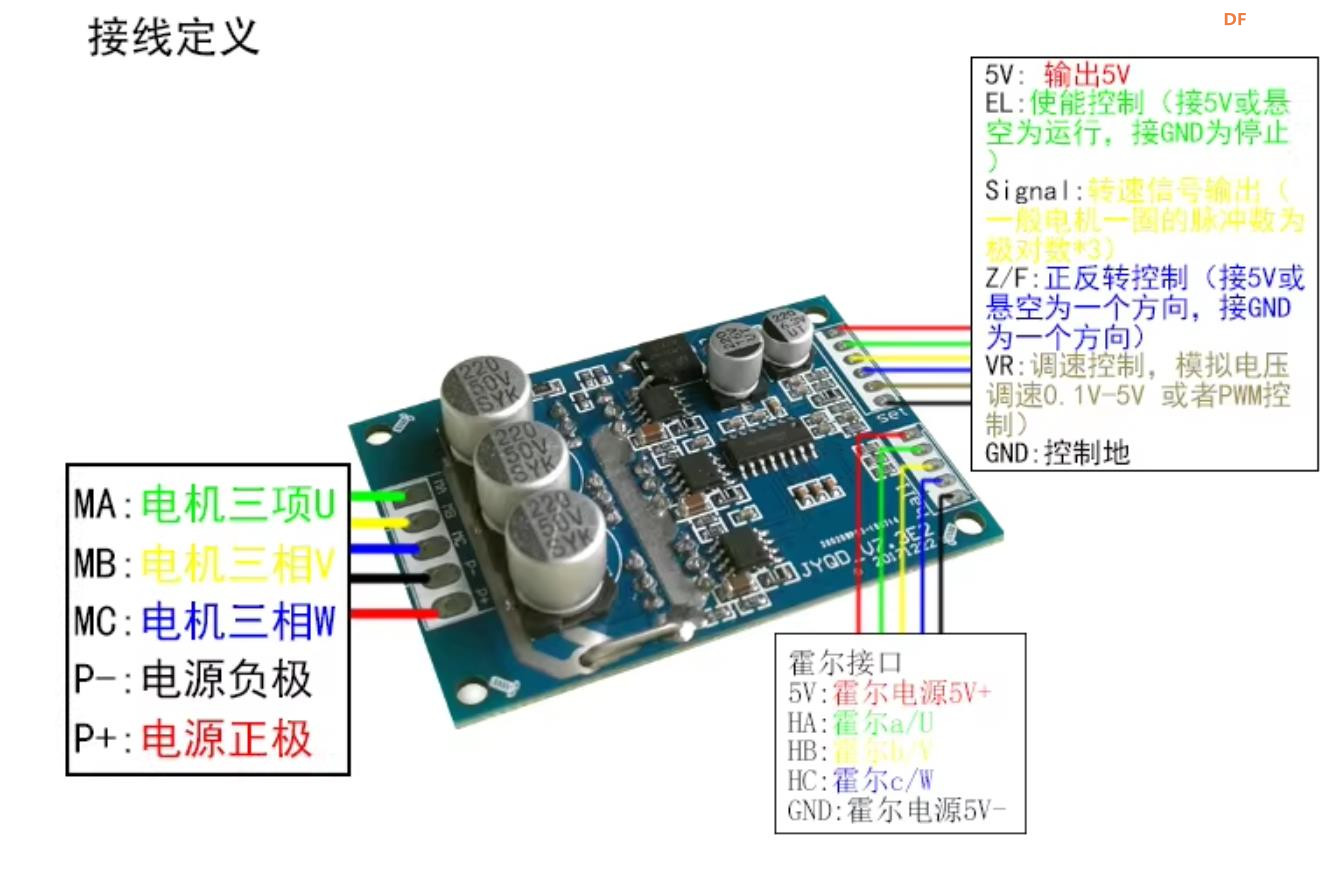
本帖最后由 驴友花雕 于 2026-2-12 10:26 编辑 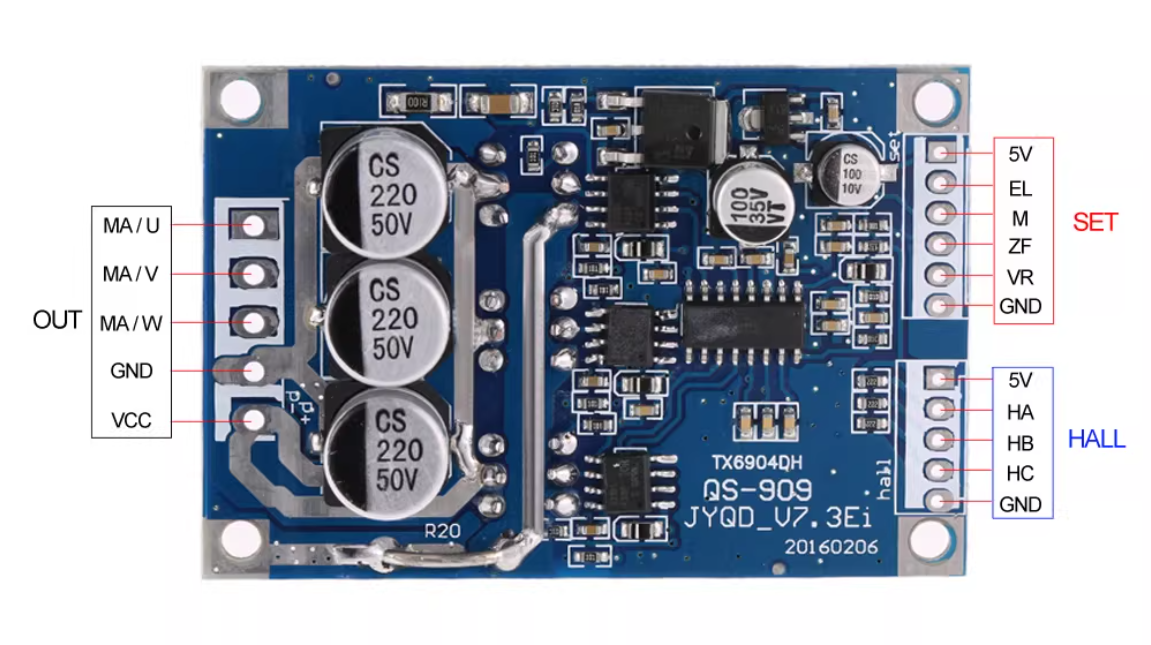 6.5 寸轮毂电机驱动方案之 36V 500W 有霍尔大功率驱动模块 驱动板接线 1、OUT电源端5线: VCC(正电源) GND(负一) MC(电机相位W) MB(电机相位V) MA(电机相位U) 2、SET控制侧6线接线: 接地控制端子接地 Vr调节器端0-5V(对应10%电机转速-100%) ZF倒车控制(接上5伏或接地可向电机旋转方向充电) m转速表脉冲输出(取决于与输出数字每转脉冲数相对应的电机极数) EL使能控制端子(接地5伏OT接地,然后接地5伏,电机停止) 5伏控制终端 3、HALL霍尔5线接线: 5伏,霍尔电源正极 Ha、霍尔信号 Hb、霍尔信号 Hc、霍尔信号 接地,霍尔负极 |
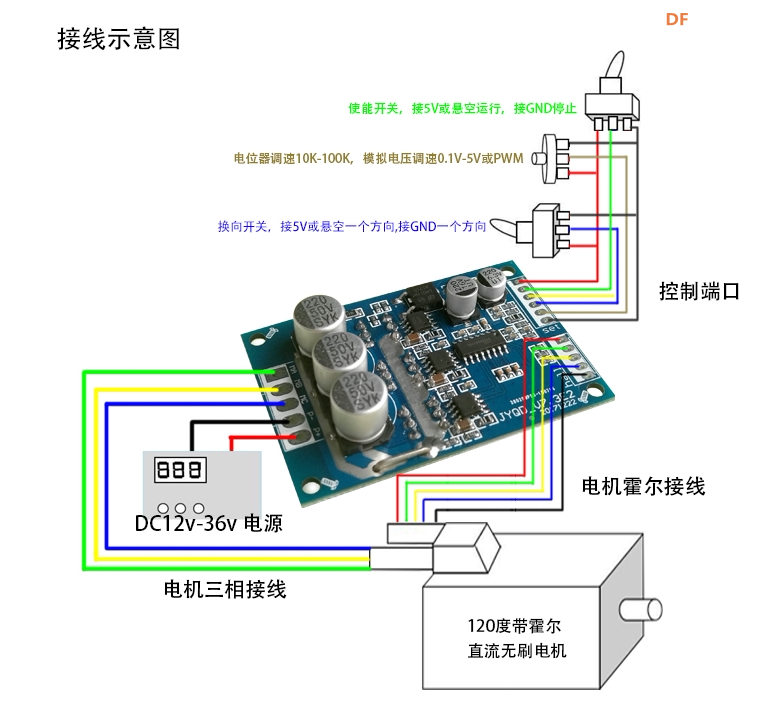
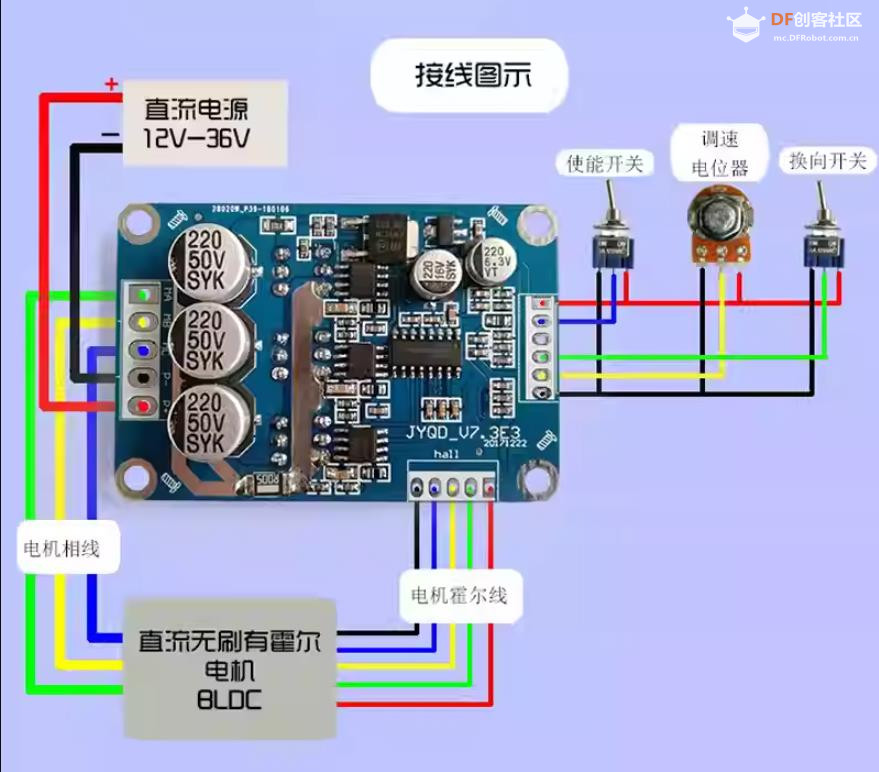 驱动板接线说明 1、电机速度控制接线方法:可用电位器系统速度也可连接到单片机控制,当电位器控制接线时,电位器中间插脚连接到VR速度端口,电位器两端连接到5V,接地端电压更快,速度更快。 2、电机转向控制接线方法:也可将开关控制连接到单片机控制,一个方向接地,然后在一个方向5V。 3、脉冲速度信号:高、低输出。IC无法理解客户要求的信息 霍尔信号输入: 接线图如图所示,其中一个对应于HA、HB、HC,在电机上,连接到电机HAL的5V电源信号为正,接地电源信号为负,连接到电机大厅。 注:由于电机厂家不同,使厅线订货不一定要按线路板上的线路顺序匹配,需要调整,请家长注意!如果线路顺序不对,不能正确启动,电流或启动其他现象不能打开,强制使用驱动盘会烧坏!!!! 电机驱动板12-36V直流电源输入,VCC正电源,GND负电源 电气接线方式:三线无刷直流电机,对应的MA/U、MB/V、MC/W 提示:如果您使用的散热片小于60W,没有额外的散热片,一定要添加60W以上的散热片,在不降低散热片的驱动效率的情况下,温度过高会造成永久性的伤害!散热器的尺寸可能是基于恶劣环境的工作(建议冷却面积大于200平方厘米)!安装散热器时,一定要注意模块背面的MOS管绝缘,没有绝缘,它会粘在驱动板上永久损坏!建议加保温膜,两边加保温板加热脂! |
|
【花雕动手做】6.5 寸轮毂电机驱动方案之 36V 500W 有霍尔大功率驱动模块 直流无刷(有霍尔)电机相序调整教程 专门针对 6.5 寸轮毂电机、平衡车电机、机器人电机,简洁、专业、不绕弯。 一、什么是相序? 无刷有霍尔电机 = 3 根相线(U/V/W)+ 5 根霍尔线 相线:决定电机转不转、力大不大 霍尔线:决定电机位置反馈对不对 两者必须正确对应,否则: 电机抖动 电机不转 电机狂响、发热 转一下就停 反转、无力 二、最简单的现场调相序方法(工程师通用) 只需要记住一句话: 霍尔线不动,只调相线;相线不动,只调霍尔。 方法 A:只调 3 根相线(最快) 保持霍尔线 完全不动3 根相线随便换,只有 6 种组合: U→V→W U→W→V V→U→W V→W→U W→U→V W→V→U 正常现象: 抖动 → 错 响但不转 → 错 转但无力 → 错 顺畅转、有力、安静 → 对了 方法 B:只调 5 根线里的 3 根霍尔信号线 保持相线 完全不动只换 霍尔 A、霍尔 B、霍尔 C 顺序 同样 6 种组合,找到顺畅转动那一组。 三、快速判断相序对错(一眼识别) 现象 结论 上电抖动一下 相序错 电机嗡嗡响不转 相序错 转一下就停 相序错 电机发热快 相序错 反转、无力 相序错 顺畅匀速、安静、有力 相序正确 四、标准正确对应关系(通用) 大多数驱动器、轮毂电机、平衡车电机默认: U 相 → 霍尔 A V 相 → 霍尔 B W 相 → 霍尔 C 如果不对,就按上面方法两两互换,最多试 3 次就能成功。 五、最实用口诀 霍尔不动调相线,相线不动调霍尔;抖动不转都是错,顺畅有力才算对。 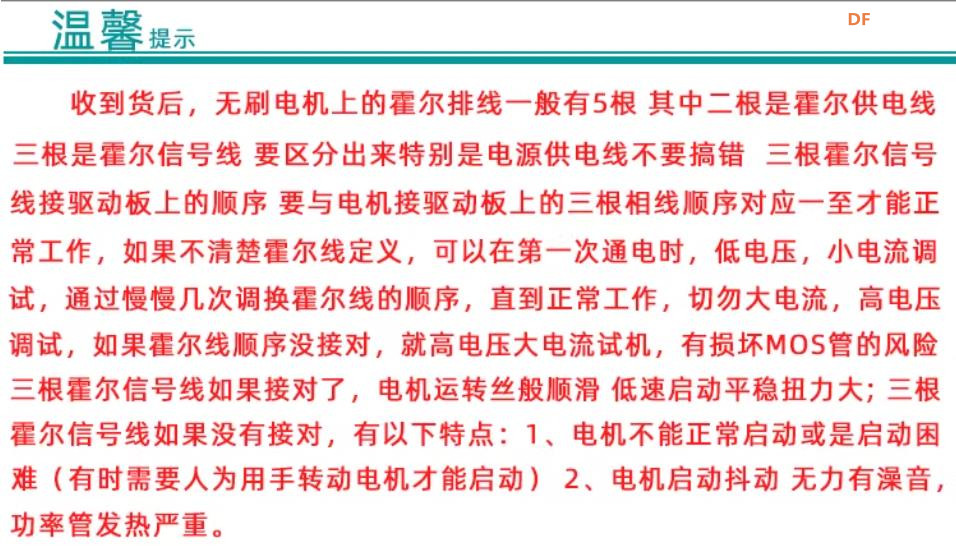 |
|
【花雕动手做】6.5 寸轮毂电机驱动方案之 36V 500W 有霍尔大功率驱动模块 有霍尔驱动 + 单片机 连接方法 一、整体结构 单片机负责发指令:调速、正转、反转。驱动模块负责放大功率,驱动 36V 500W 轮毂电机,并读取霍尔信号。电机提供三相动力线 + 霍尔信号线。 二、电机与驱动模块连接 电机三相线(粗线)U、V、W 三根线随便接驱动板对应的 U、V、W 端子。若抖动、不转、无力,再任意调换其中两根即可。 电机霍尔线(细线 5 芯)按颜色对应插入驱动板霍尔接口:红 → 5V黑 → GND黄、绿、蓝 → H1、H2、H3(顺序错了电机不转,调换即可) 三、驱动模块与单片机连接 只需要连接 4 根信号 + 共地: GND(必须共地)驱动板控制 GND → 单片机 GND PWM 调速驱动板 PWM 端子 → 单片机 PWM 引脚占空比越大,速度越快。 正转控制驱动板 FORWARD → 单片机 IO 口输出高电平电机正转。 反转控制驱动板 BACKWARD → 单片机 IO 口输出高电平电机反转。 刹车(可选)驱动板 BRAKE → 单片机 IO 口高电平刹车,低电平释放。 四、电源连接 36V 锂电池正极 → 驱动板电源正极 36V 锂电池负极 → 驱动板电源负极 单片机 5V 可从驱动板取 5V,或单独供电,但必须共 GND。 五、正常工作判断 电机顺畅转动、无抖动 正反转正常 调速线性、有力 无啸叫、不发烫 出现抖动、嗡嗡响、不转 → 调换三相线中任意两根。 六、最简控制逻辑 正转:FORWARD=1,BACKWARD=0,输出 PWM 反转:FORWARD=0,BACKWARD=1,输出 PWM 停止:PWM=0,或刹车脚置 1 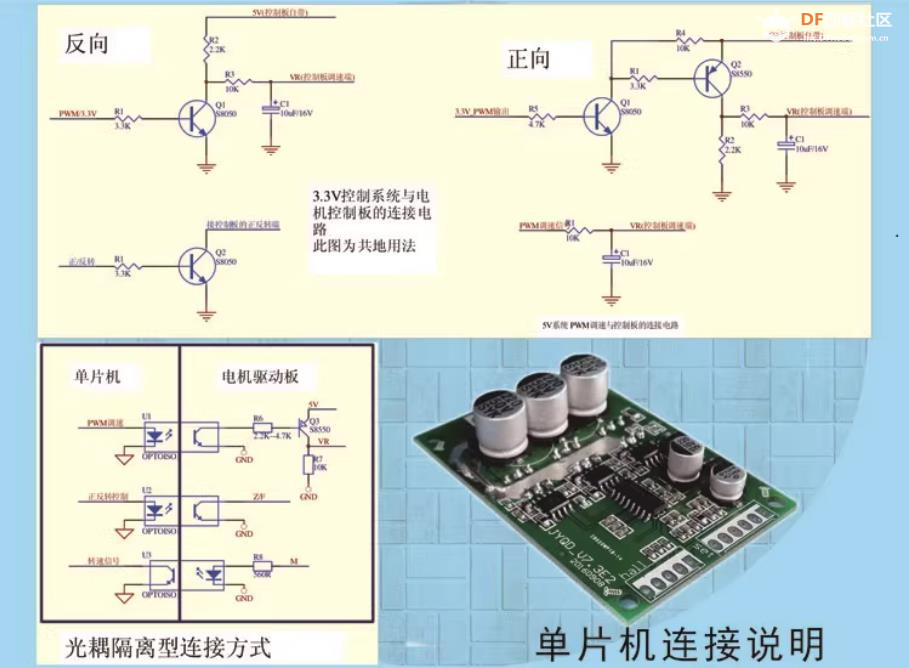 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






