|
704| 3
|
[项目] 【花雕动手做】拆解 127mm 铝合金创客版全向麦克纳姆轮 |
|
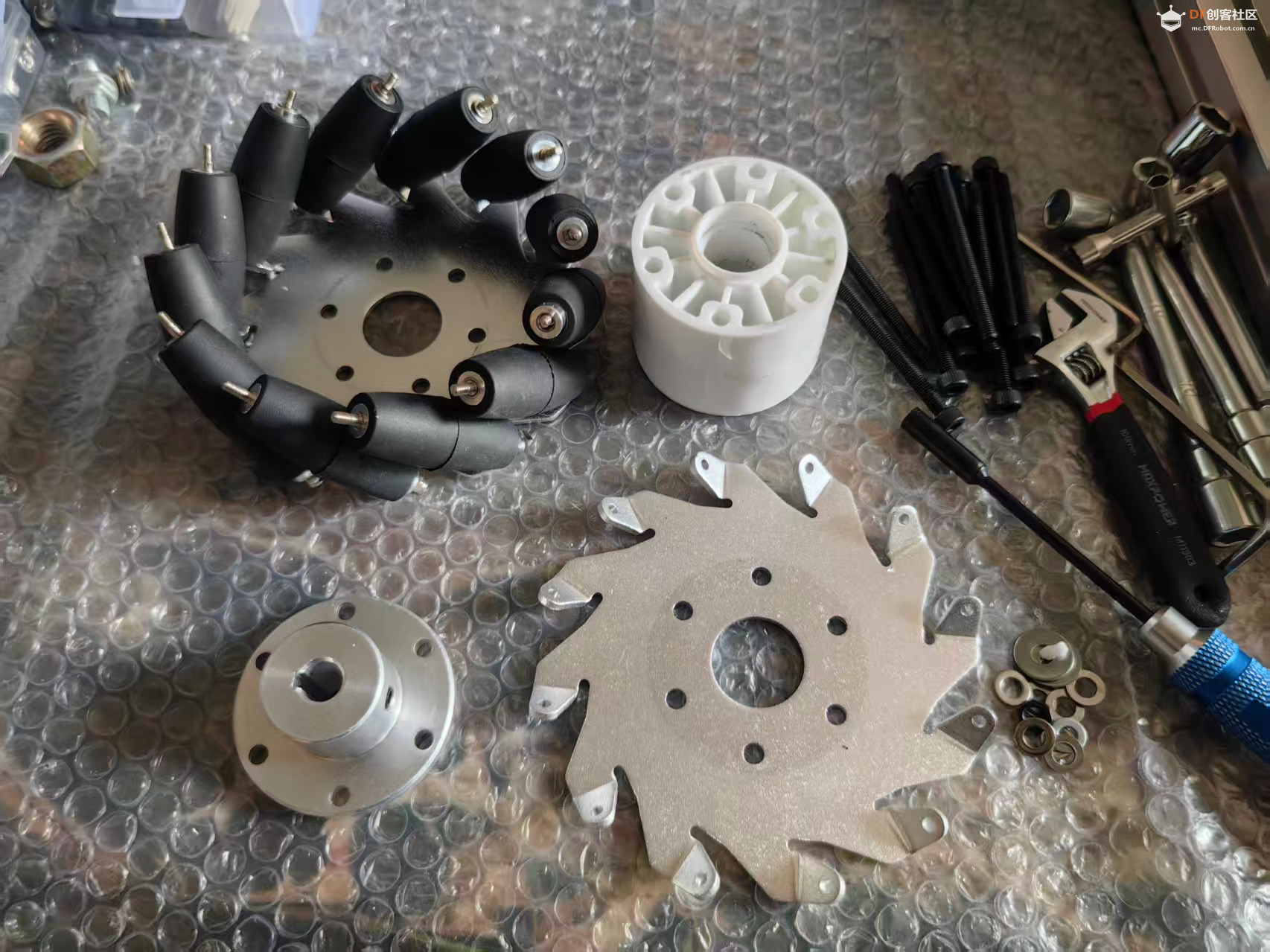
本帖最后由 驴友花雕 于 2026-2-27 09:58 编辑 拆解主要步骤 1、卸下中心固定螺丝先用内六角扳手拧下麦克纳姆轮中心的主轴固定螺丝,这是整个轮子的受力核心,也是拆解的第一步。 2、分离轮毂左右侧板螺丝取下后,轻轻分开铝合金左右轮毂板,就能看到内部的辊子、轴承与支撑结构。 3、取出斜向辊子依次取出一圈斜向布置的尼龙 / PU 辊子,注意每个辊子都自带微型轴承,保证滚动顺滑。 4、拆解辊子轴与轴承把辊子内部的金属轴和两端轴承取出,观察受力结构与转动方式,这是麦克纳姆轮实现全向移动的关键。 5、清理并检查部件检查铝合金轮毂是否变形、轴承是否顺畅、辊子表面是否磨损,为后续组装和底盘调试做准备。 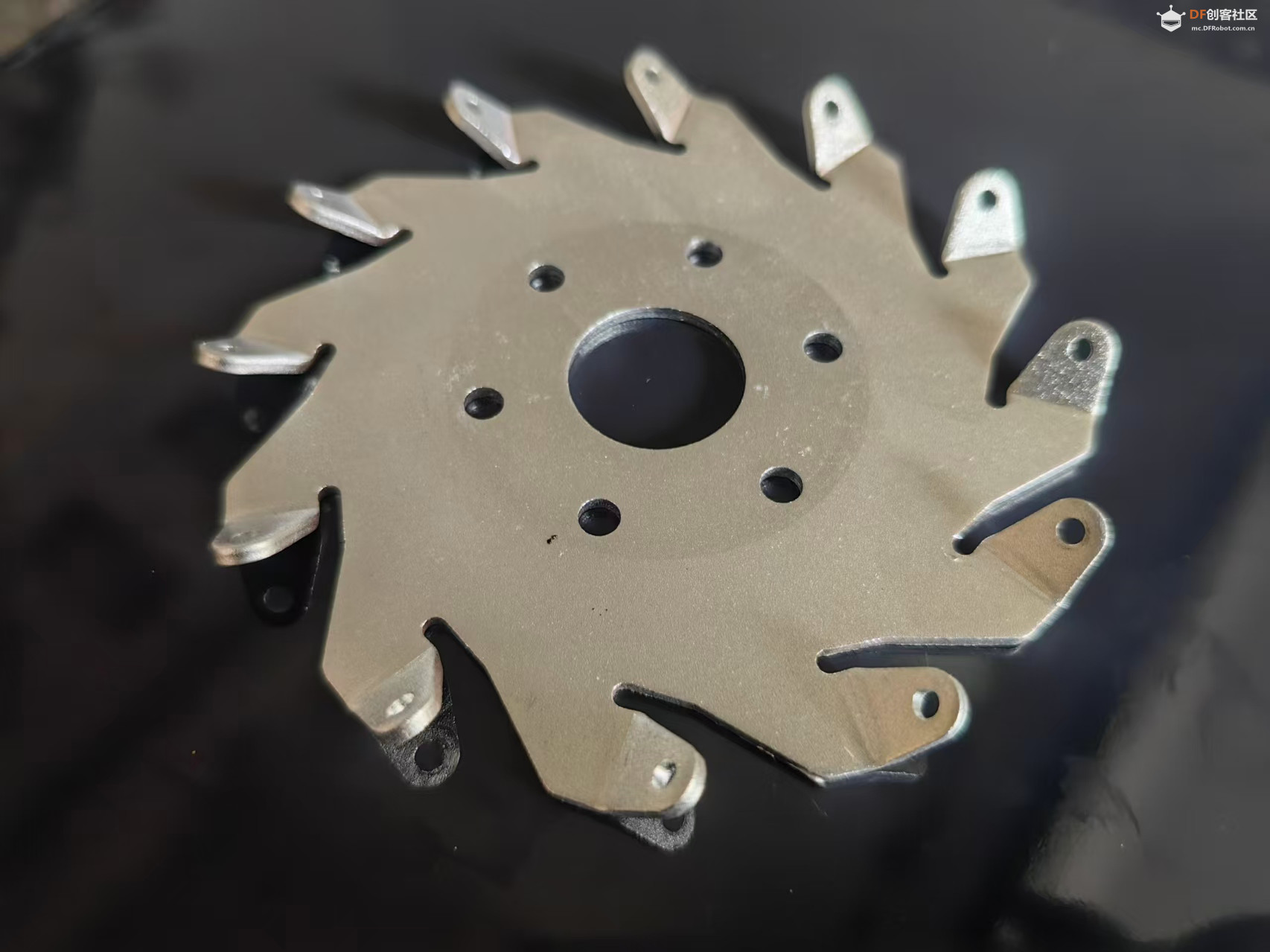     |
|
本帖最后由 驴友花雕 于 2026-2-27 10:01 编辑 在全向移动机器人底盘里,轮子直径直接决定通过性与稳定性。127mm 创客版全向铝合金麦克纳姆轮,是比 100mm 更适合中大型底盘的升级选择 —— 直径更大、越障更强、负载更高,搭配 12–24V 大扭矩减速电机或轮毂电机,能轻松搭建更稳、更快、更专业的全向移动平台。 一、核心参数 轮子直径:127 mm(5 寸) 轮子宽度:40–50 mm 轮毂材质:铝合金(CNC 精加工) 辊子材质:PU 弹性轮 / 高强度尼龙,内置精密轴承 辊子角度:45°(标准全向结构) 适配电机轴:6 mm / 8 mm(D 轴、圆孔轴通用) 安装方式:中心夹紧式 / 螺丝法兰固定 单轮负载:8–15 kg 适用底盘:4 轮全向移动底盘(2 左 + 2 右成对使用) 适用地面:室内地砖、水泥地、实验室平整地面 二、产品特点 127mm 大直径,越障能力明显提升 铝合金轮毂,强度高、重量轻、散热好、不易变形 辊子带轴承,转动顺滑、噪音低、耐磨耐用 支持全向移动:前后、左右、斜行、原地自旋 中大型机器人底盘首选,稳定性远优于小直径轮 三、典型用途 中大型全向移动机器人底盘 自动跟随、视觉导航、激光 SLAM 机器人平台 RoboMaster、Robocon 等竞赛机器人小车 AGV 搬运底盘、服务机器人、巡检机器人 需要更好通过性与稳定性的创客 DIY 项目  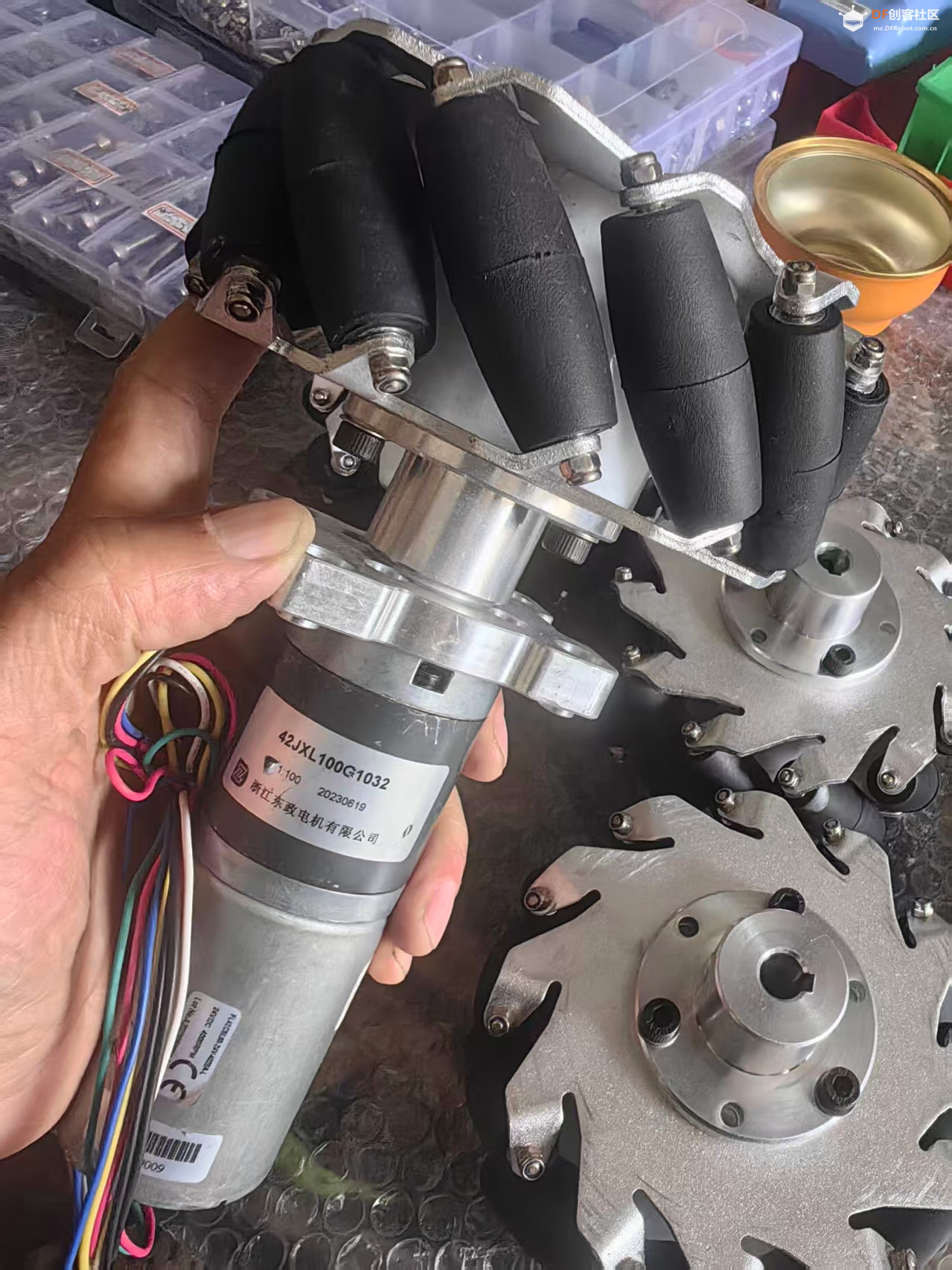 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






