|
1299| 5
|
[知识点] 【花雕动手做】适合机器人底盘的三种铝合金麦克纳姆轮 |

|
本帖最后由 驴友花雕 于 2026-2-23 17:43 编辑 一、75mm 铝合金麦克纳姆轮是小型创客 / 教学机器人实现全向移动的主流选择,核心优势是铝合金轮毂刚性高、适配 4–8mm 电机轴,四轮套装常见动态负载15–30kg,适合搭载 Arduino/ESP32 的移动底盘与教学平台。  1、核心规格(主流创客级,以 YFROBOT 与 TZ-MW75 为例)  2、关键选型要点 (1)安装接口 优先选带联轴器的套装(4–8mm 多规格),适配无刷 / 减速电机更灵活。 法兰款适合大扭矩,键槽款精度高,创客级多用电联器快装。 (2)负载与场景匹配 教学 / 竞赛小车(含摄像头、机械臂):选15kg 动态负载款。 轻载 AGV / 室内巡检:选30kg 静态负载款,确保冗余。 地面为瓷砖 / 环氧时,聚氨酯小轮更稳;地毯需选高硬度橡胶并降载。 (3)精度与耐用性 小轮带滚动轴承的款,阻力小、寿命长,优于无轴承 / 滑动结构。 铝合金一体轮毂比拼接款抗扭,适合长期教学使用。 3、电机与驱动搭配建议 (1)电机类型:减速电机(TT/310/520)或小型无刷(BLDC),减速比20:1–60:1,兼顾扭矩与速度。 (2)单轮扭矩:建议≥0.2N·m(含减速),确保侧向移动不打滑。 (3)驱动方案:4 路直流电机驱动(如 TB6612/DRV8833)或无刷驱动,支持正反转与 PWM 调速。 (4)控制器:Arduino Mega/ESP32/STM32,配合运动学库实现全向控制。 4、安装与调试注意事项 (1)左右轮区分:麦轮有左右旋,必须按 “左前左后左旋、右前右后右旋” 安装,否则无法侧移。 (2)同轴平行:四轮轴线需严格平行,安装误差会导致跑偏与磨损。 (3)预紧力:联轴器固定时避免过紧,防止电机轴弯曲;小轮转动应无卡滞。 (4)标定:新底盘需标定电机转速与方向,优化 PID 参数,减少原地旋转时的偏移。 5、总结 75mm 铝合金麦轮是教学与创客项目的黄金尺寸,兼顾负载、体积与成本。选型时重点关注安装接口、负载能力、小轮材质与轴承配置,搭配合适的减速电机与驱动,可快速实现稳定的全向移动底盘。 |
|
本帖最后由 驴友花雕 于 2026-2-23 17:50 编辑 二、100mm(4 英寸)铝合金麦克纳姆轮:通用全能型全向轮 100mm 是创客 / 教学 / 中型 AGV 的黄金均衡尺寸,比 75mm 承载与通过性更强,比 127mm 更轻便、响应更快;铝合金轮毂(6061 喷砂为主)刚性足、抗扭好,配合 PU/TPR 带轴承小轮,45° 斜置实现横移、斜行、原地旋转的全向运动,是多场景机器人底盘的主力选择。  1、典型规格参数(分创客级与工业入门级)  2、核心优势与适用场景 (1)优势 尺寸均衡:底盘尺寸 25–35cm,兼顾桌面演示与地面作业 负载覆盖广:四轮动态负载可达 30–40kg,满足带视觉、机械臂的小车 兼容性强:适配 520/370 减速电机、小型无刷,Arduino/ESP32/STM32 均能驱动 耐用性:铝合金轮毂不易形变,轴承小轮比无轴承款寿命提升 3–5 倍 (2)场景匹配 教学竞赛:机器人比赛、PID 控制实验、视觉导航小车 轻载 AGV:实验室 / 仓库物料转运、室内巡检机器人 创客项目:机械臂移动平台、遥控全向车、ROS 入门底盘 3、选型关键要点 (1)左右旋区分:必须成对采购(左 2 + 右 2),安装错误直接导致无法侧移 (2)安装方式 联轴器款:快装,适配 4–8mm 多轴径,创客首选 法兰盘款:大扭矩场景,需配 M5/M6 螺丝 键槽款:高精度、低回差,适合工业 AGV (3)小轮与轴承:严禁选无轴承小轮,长期使用阻力大、易卡滞;优先 PU 材质,避免硬塑料划伤地面 (4)负载冗余:按实际总重 ×1.5 倍选四轮总负载,避免重载下打滑或损坏 4、电机与驱动方案推荐 (1)电机:减速电机(370/520)或小型无刷;减速比30:1–60:1;单轮扭矩≥0.5N·m(带减速),确保侧移与旋转不丢步 (2)驱动板:TB6612(入门)、DRV8871(大电流)、无刷电调(BLDC 方案);必须 4 路独立 PWM 调速 (3)控制器:Arduino Mega/ESP32/STM32;配合麦轮运动学库,快速实现全向控制算法 5、安装与调试注意事项 (1)四轮安装需保证轴线严格平行、轮面垂直地面,误差过大会导致跑偏、磨损加剧 (2)联轴器固定力度适中,过紧易弯电机轴,过松打滑 (3)地面为瓷砖 / 环氧时,无需额外处理;地毯环境建议降负载 1/3,并选用高硬度小轮 (4)新底盘必须做方向标定与 PID 调速优化,尤其是原地旋转的速度一致性 6、总结 100mm 铝合金麦克纳姆轮凭借均衡的尺寸、负载与响应速度,成为大多数机器人项目的首选。如果你在 75mm 与 127mm 之间犹豫,优先选 100mm;搭配合适的减速电机、驱动板与控制器,能快速搭建出稳定可靠的全向移动底盘。  |
|
三、127mm(5 英寸)铝合金麦克纳姆轮:中重载全向移动主力 127mm 是创客进阶、科研平台与轻量工业 AGV 的核心尺寸,相比 100mm,其通过性、负载与稳定性显著提升,同时保持可控的体积与惯量;铝合金轮毂配合高耐磨 PU 带轴承小轮,45° 斜置设计,完美支撑横移、斜行与原地旋转,是搭载机械臂、多传感器阵列的首选轮径。  1、核心规格参数(创客级 vs 工业入门级) 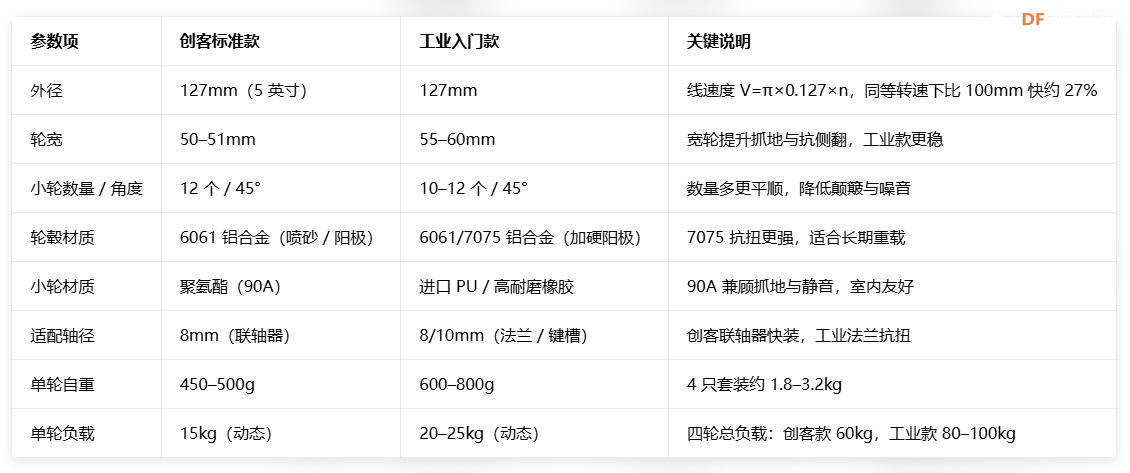 afa625e24232a1585d.jpeg#pic_center) afa625e24232a1585d.jpeg#pic_center)2、核心优势与适用场景 (1)核心优势 重载能力强:四轮动态负载可达 60–100kg,轻松搭载机械臂、激光雷达、工控机。 通过性好:127mm 直径显著提升越障能力,可轻松跨越 20mm 以内台阶、线槽。 运动平稳:12 个小轮设计,接触地面点更多,行驶更平顺,适合高精度导航。 结构可靠:铝合金轮毂 + 轴承小轮,抗扭不变形,寿命比塑料轮高 5 倍以上。 (2)适用场景 科研平台:ROS 移动底盘、SLAM 导航实验、机械臂移动平台。 教学竞赛:大学生机器人竞赛、重载物流小车、智能巡检机器人。 轻量工业:实验室物料转运 AGV、车间小型搬运车、仓储拣选机器人。 创客项目:大型全向遥控车、户外巡检机器人、多传感器融合平台。 3、电机与驱动系统精准选型 电机选型(核心指标)  驱动与控制方案 驱动板:大电流方案优先,如 DRV8874(单路 60A)、双路大功率电机驱动模块;无刷电机需配专用无刷电调。 控制器:STM32F4/F7(高性能)、ESP32(无线控制)、树莓派 + Arduino(ROS 系统)。 算法支持:需适配麦克纳姆轮运动学库,实现全向运动解算,建议加入 PID 速度闭环与里程计校准。 4、安装与调试关键要点 (1)左右旋严格区分:必须左 2 + 右 2 成对安装,安装错误会导致无法侧移,甚至损坏电机。 (2)机械精度控制:四轮轴线严格平行,轮面垂直地面,误差≤0.5mm;否则会出现跑偏、磨损加剧。 (3)联轴器安装:8mm 轴径优先选用铝合金弹性联轴器,固定力度适中,过紧易弯轴,过松打滑。 (4)地面适配: 室内瓷砖 / 环氧:90A PU 小轮,无需额外处理。 水泥地面:选用高硬度(95A)PU 小轮,提升耐磨性。 地毯环境:建议降负载 50%,并选用宽轮面款式。 (5)调试重点: 速度一致性校准:确保四轮同速同向,避免原地旋转时偏移。 负载测试:逐步增加负载,观察电机电流,避免过载。 里程计标定:通过直线与旋转实验,修正运动学参数,提升导航精度。 5、与 75mm、100mm 麦轮的核心对比(快速选型)  6、总结 127mm 铝合金麦克纳姆轮是重载全向移动的黄金尺寸,兼顾负载、通过性与运动精度,完美匹配你 20 只轮的规划中 “中重载实验平台” 的定位。搭配合适的 24V 大功率电机、大电流驱动板与高精度控制器,可快速搭建出能搭载机械臂、实现复杂导航的高端移动底盘。   |
|
参考资料:麦克纳姆轮最适合空间极度受限、需要全向灵活移动、且地面平整的室内场景。它的核心价值是零转弯半径、可横向 / 斜向平移、原地旋转,完美解决传统轮系在狭小空间的转向难题。 一、核心适用场景(按行业) 1. 工业自动化(最主流) AGV/AMR 自动导引车:工厂车间、汽车总装线、电子厂,在狭窄通道内精准对接工位、横向穿梭,无需预留转向空间。 重型精密定位平台:航空航天、船舶制造,用于大型部件(如飞机机身)的微调整位。 生产线物料转运:多车型混线生产、精密装配,灵活对接多工位。 2. 物流仓储 智能仓储机器人:电商 / 物流中心,货架间快速侧移、斜行,提升空间利用率(可达 30%+)。 重载叉车 / 堆垛机:仓库内横向移动,无需大半径转弯。 3. 医疗与特种服务 医疗设备:手术台、移动诊疗平台、病房物流机器人,在狭小空间无死角移动、精准停靠。 全向轮椅:帮助行动不便者在卫生间、电梯等狭小空间灵活平移。 商用服务机器人:餐厅送餐、酒店配送、商场清洁,在人流密集区灵活避障。 4. 科研与教育 机器人竞赛(如 RoboCup):利用全向移动实现快速攻防、复杂战术。 教学平台:用于机器人运动控制、全向移动算法研究。 5. 舞台与影视 动态舞台机械:演唱会、展览的移动展台,实现无轨道、平滑的复杂轨迹移动。 摄影稳定平台:电影拍摄中实现多角度、无抖动运镜。 6. 军事与特种作业 排爆 / 侦察机器人:在废墟、狭小空间内快速调整姿态、隐蔽机动。 危险环境作业车:核工业、化工领域,遥控完成检修、检测,减少人员风险。 二、选型关键前提(必须满足) 地面条件:必须是平整、硬质、无碎石的室内地面(如环氧地坪、瓷砖);粗糙 / 松软 / 有缝隙的地面会导致辊子卡滞、震动大、效率低。 运动需求:优先选择低速、高精度、频繁换向的场景;不适合高速长距离行驶(效率低、震动大)。 成本与维护:单轮成本是传统轮的 5–10 倍,辊子易磨损,适合对灵活性要求极高、预算充足的项目。 三、不适合的场景(避坑) 户外非铺装路面、草地、泥泞、碎石路(极易卡滞、损坏)。 高速、长距离、连续行驶(效率低、能耗高、震动大)。 预算极度有限、追求极低维护成本的场景。 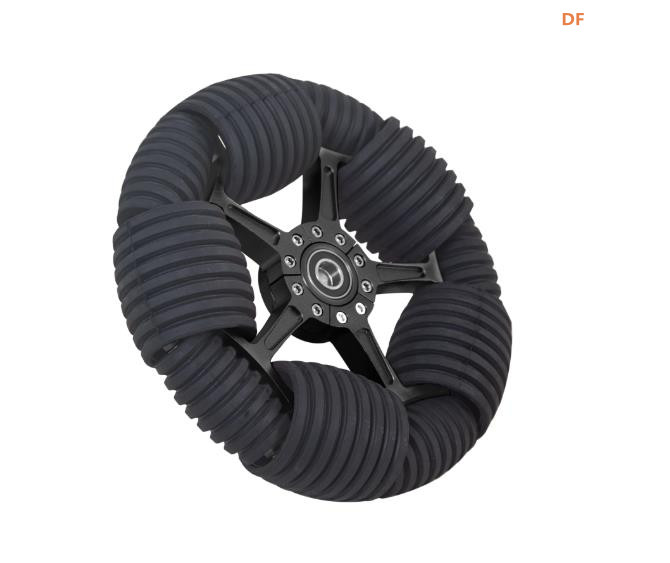         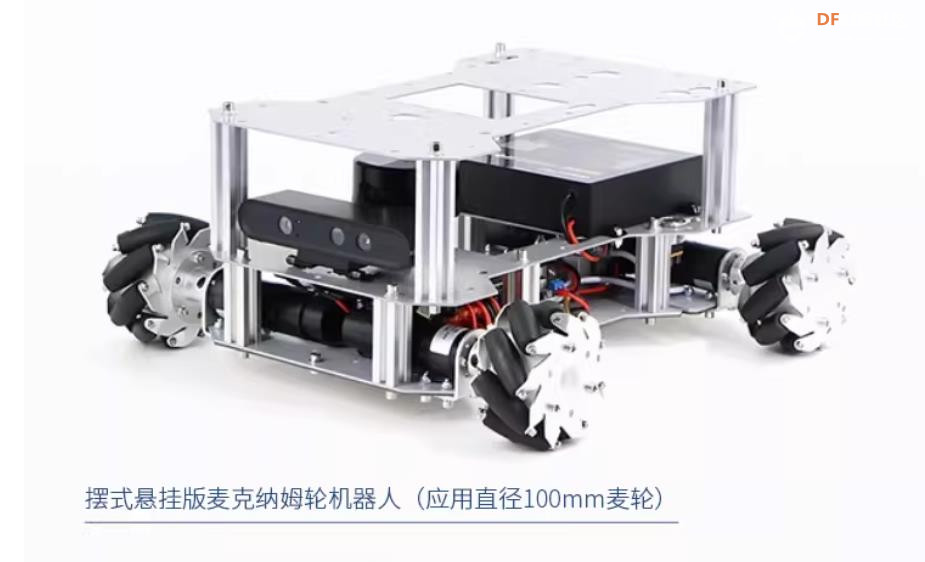   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






